
Abstract
Attitude, speed, and position of unmanned aerial vehicles are susceptible to wind disturbance. The types, characteristics, and mathematical models of the wind, which have great influence on unmanned aerial vehicle in the low-altitude environment, are summarized, including the constant wind, turbulent flow, many kinds of wind shear, and the propeller vortex. Combined with the mathematical model of the unmanned aerial vehicle, the mechanism of unmanned aerial vehicle movement in the wind field is illustrated from three different kinds of viewpoints including velocity viewpoint, force viewpoint, and energy viewpoint. Some simulation tests have been implemented to show the effects of different kinds of wind on unmanned aerial vehicle’s path and flight states. Finally, some proposals are presented to tell reader in which condition, which wind model should be added to simulation, and how to enhance the stability of unmanned aerial vehicle for different kinds of wind fields.
Introduction
Since the advent of airplanes, various aircraft accidents occurred continually, according to statistics result, it can be seen that a considerable part of them were due to poor atmospheric conditions. In the period of 1960s and 1970s, people became aware of the terrible power of the nature acting on the aircrafts and began to study it.1–3
Researchers in that period found the winds resulting in aerial accidents could mainly be divided into following categories: downburst, 4 turbulent wind, 5 wind shear 6 and the wake vortex, 7 and some actions were implemented to cope with these severe meteorological environments. Professor Fujita, a Japanese scientist, took the lead in the mid-1970s in reasonably and clearly summarizing the meaning of microdownburst, after that Ivan and Woodfield realized their simulation.8,9 After that, many scholars made a great deal of contributions.10–12 By the unremitting efforts in decades, the wind—induced manned aircraft accidents have almost been avoided.
With the development of technology, in recent years, unmanned aerial vehicles (UAVs) have been widely used. Compared with the manned aircraft, they are less expensive, and they do not put the pilots at risk when they crash. They fly longer hours as long as the vehicle allows for it (no human fatigue in the plane), 13 and UAV could attract extensive attention also due to their flexibility and small size. The Civilian UAVs mainly include meteorological observation UAV, pesticide spraying UAV, and communication relay UAV, while military UAVs include target UAV, electronic interference UAV, and communication relay UAV. 14
However, UAVs have their own drawbacks. Normally, UAVs have the lower flight speed, lighter takeoff weight, smaller size, and lower flight altitude than manned aircrafts, so these factors make UAV more susceptible to the wind disturbance. The disturbance of the atmospheric environment increases the control difficulty, and even affects flight safety. From weak turbulence to the typhoon, all kinds of wind disturbance will affect UAV at different degrees. The influence of wind on a UAV can be seen as a process of energy transfer. Wind transfers its energy to the UAVs and then changes their flight states. 15 Besides, UAVs need to work in different terrain, altitudes, temperatures, and time periods, which results in the UAV not only susceptible, but also inevitable to atmospheric disturbances.
There are lots of accidents about UAV caused by the wind, like the manned aircrafts suffered decades ago. The most comprehensively concerned two cases are listed below: (1) The National Transportation Safety Board (NTSB) reports that an accident occured in June 2016. During the inaugural flight of Facebook’s Aquila unmanned solar-powered drone, the drone suffered a “structural failure.” The reason is a strong gust; 16 (2) according to NTSB, in May 2015, Google’s parent company Alphabet’s Solara 50 suffered an uncontrolled accident when it encountered a hot updraft while flying in the desert landing area of New Mexico. 16 Though many scholars have made some contributions to improve the flight performance of UAV by numerical method, theoretical method, or experimental method,17–19 they neither consider the effects of wind field correctly, nor use it reasonably. To reduce the risk of UAV during flying and to increase the mission success rate, it is extremely significant to figure out how different kinds of effects of various kinds of winds act on UAV.
The main contributions are as follows:
Gives a comprehensive summarization about the categories of winds in low altitude, which are more easily encountered by UAV distinguished from the manned aircrafts, including their characters and mathematic models.
Illustrates and analyzes the mechanisms of different kinds of wind interference on UAV’s speed, attitude and position.
Implements some simulation test to show how different kinds of wind affect UAV on its flight path and states.
Presents some advices on how to add reasonable wind fields into simulation test, and on how to keep flight safety.
The categories of the wind effects on UAV
Constant wind
The constant wind refers to the average wind speed in a certain environment, which varies along with temporal and spatial variation. 15 The constant wind does not really exist in nature because it is just the reference value of wind speed in a certain environment. The value of the constant wind in different temporal condition or different spatial condition can be obtained by statistics. There are many relevant websites that record atmospheric data. 20 Normally, the constant wind is used for simulation tests of UAV, while it is unable to perfectly describe the flight environment. In order to implement a more affective simulation test, other kinds of wind must be added.
Turbulent flow
Turbulent flow is a continuous random fluctuation, which is always accompanied by the constant wind. The cause of turbulent flow is related to many factors, such as wind shear, heat exchange, topographic factors, and the vortices of other aircrafts. 15 Stochastic process theory and method are often used to describe atmospheric turbulence in engineering applications. The turbulence models include Dryden model and Von Karman model, both of which depend on a large number of measurements and statistics. 21 The difference is that Dryden model establishes the correlation function of turbulence before deriving the spectral function, while Von Karman, on the contrary, establishes the spectral function first and then deduces the correlation function of turbulence. After relevant research, there is no significant difference between the two models; only the slope of the high frequency band of the spectral function is different, so both of them can be used in solving engineering problems.
The Dryden spectral function
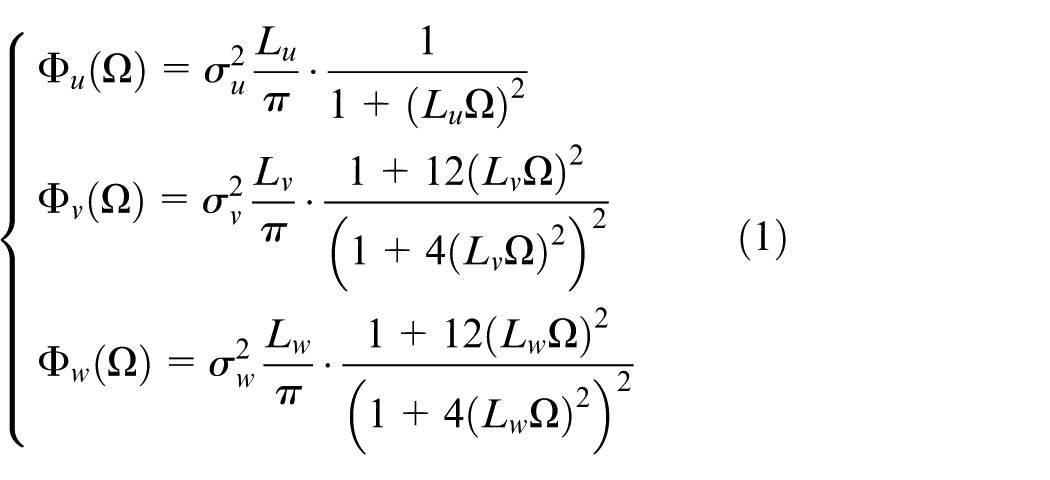
The Von Karman spectral function
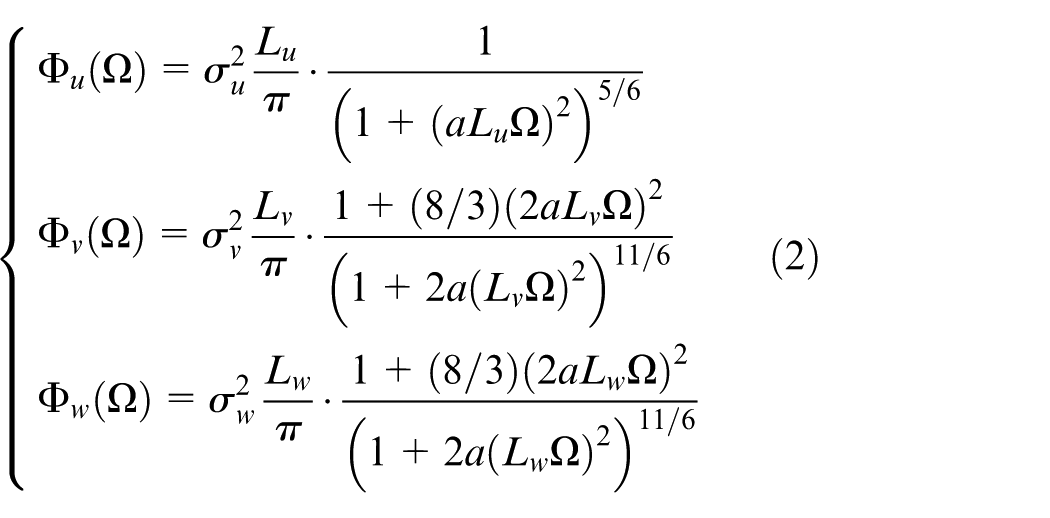
where
Wind shear
Wind shear refers to the constant wind, which changes over time or in space. The American NRC (National Research Council) defines the degree of wind shear as the difference between two wind vectors at two points in space divided by the distance between those two points. There are many causes of wind shear. In UAV flight, the common low-altitude wind shear includes frontal wind shear, 22 nocturnal jet wind shear, 20 topography-induced wind shear 23 , and microdownburst. 24 Their causes and characteristics are shown in Table 1.
The types, causes, and characteristics of the low-altitude wind shear.
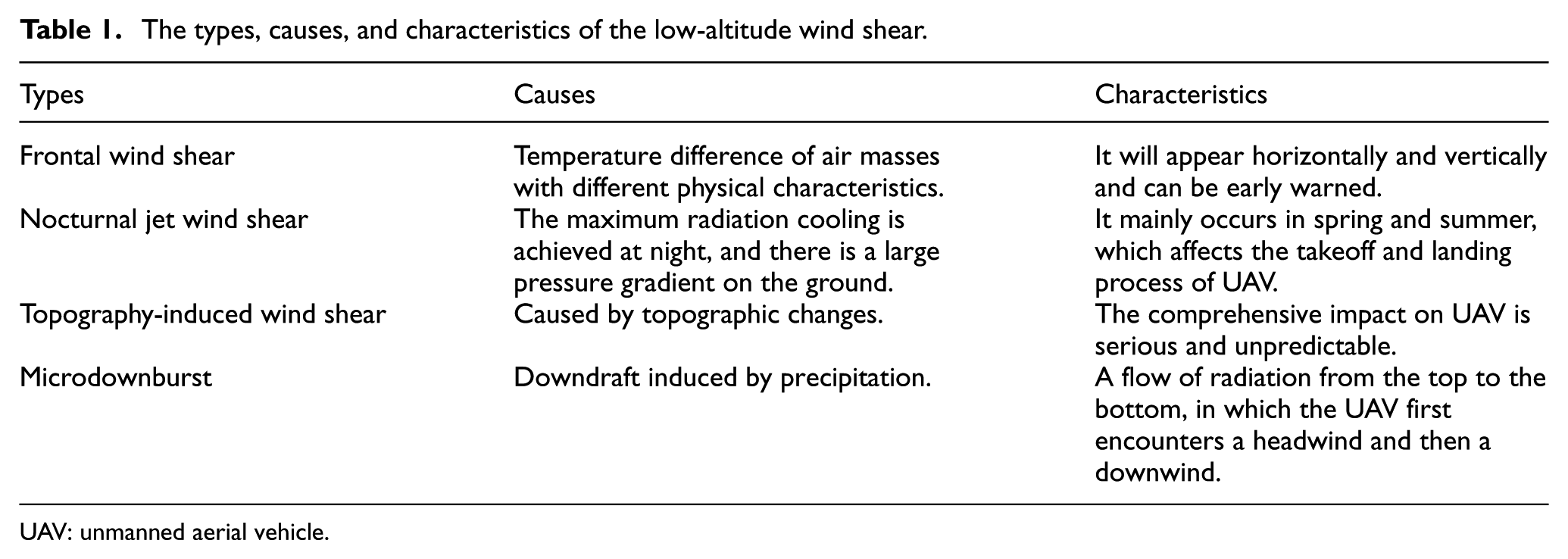
UAV: unmanned aerial vehicle.
The speed of wind shear is a function of the spatial position, and its model is relatively simple. The frequency of wind shear is also not as large as turbulent flow, it changes every few seconds as its maximum frequency. In the simulation test, the abrupt change of constant wind speed is used to indicate the occurrence of wind shear.9,25
Wind shear is a discrete or deterministic wind speed, which often occurs in a very short time, and it is a strong atmospheric disturbance. 15 The wind shear model can be divided into several categories according to its profile geometry, including rectangular model, trapezoidal model, and “1-consine” model. Specific models for simulation tests are expressed as follows:
Rectangular model
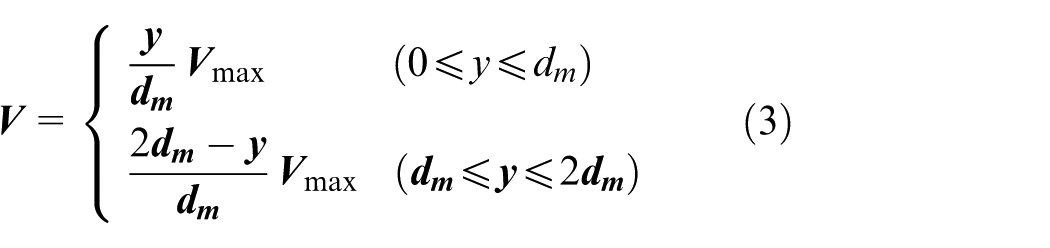
Trapezoidal model
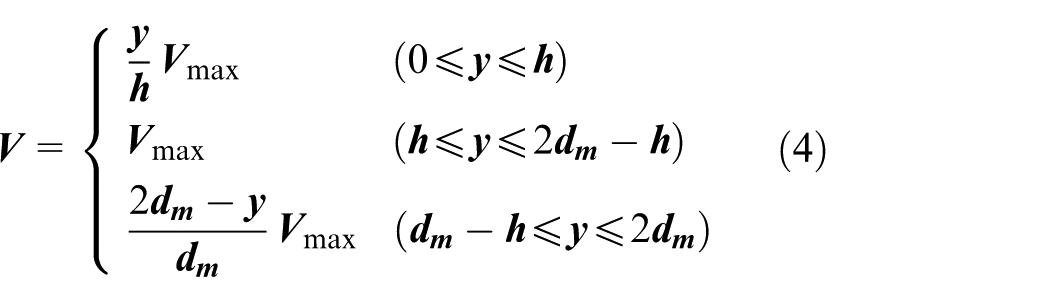
Full wavelength “1-consine” model
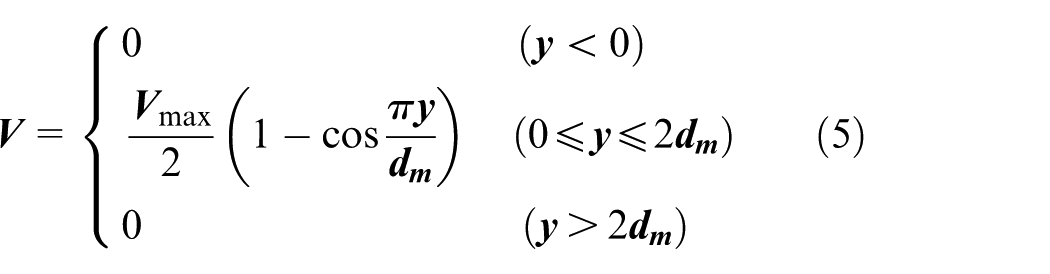
Half wavelength “1-consine” model
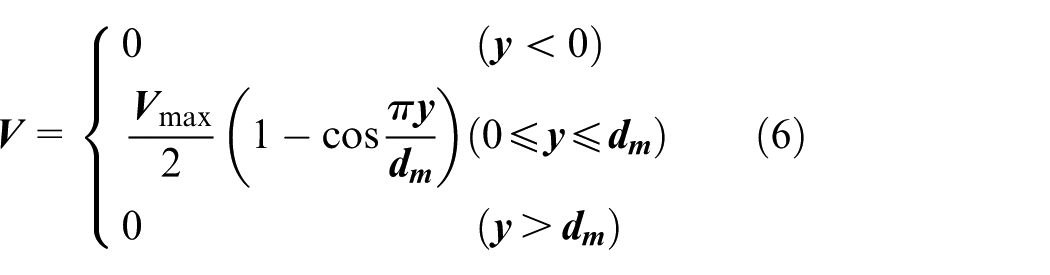
where
Propeller vortex
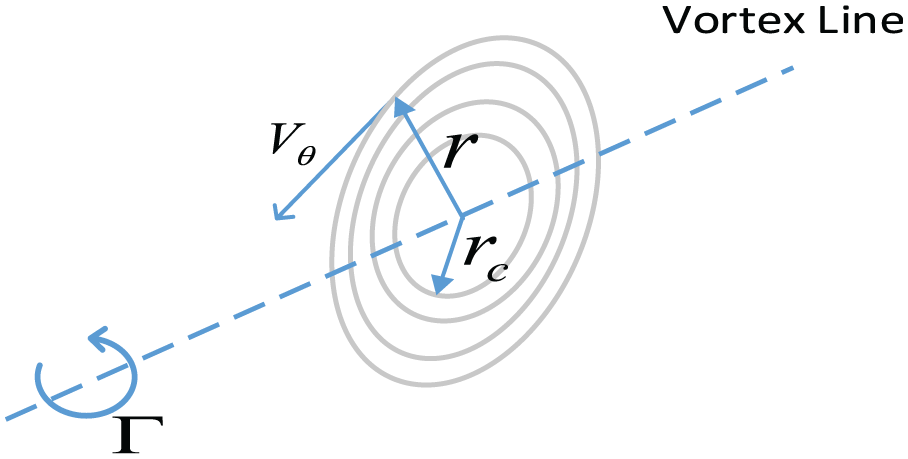
For large manned aircrafts, there are wake vortices caused by the wings of the aircrafts, and they significantly affect other aircrafts, which follow the head aircraft. In terms of the UAV, because of their lower flying speed, the wake vortex will not play an important role any more, while another vortex caused by the propellers must be considered here. Just as its name implies, the propeller vortex is formed by the propeller. When the propeller rotates, the compressed air pass through the interval of the rotating blades and form a vortex field. This field will influence the flight condition of the following aircrafts, 26 especially in the close formation flight.
Likewise, the model of the propeller tip vortex also can be established with the Navier–Stokes equations.
27
To study the effects of the propeller vortices on a wingman UAV, the complete vortex flow is not required. It is sufficient to know the vortex-induced velocities vary with position and time. Define that the circulation

where g is the gravitational acceleration,
For a small UAV, its airspeed
While there are different models to represent the vortex-induced velocities, the tangential velocity distributions
Inviscid vortex

The low-order algebraic vortex (Burnham–Hallock vortex) 30

Gaussian vortex (Lamb–Oseen vortex) 31

Proctor model 32
For

and for
Vortex-induced velocity.
Figure 2 shows the vertical velocity for the five models mentioned above, they are computed assuming a core radius of
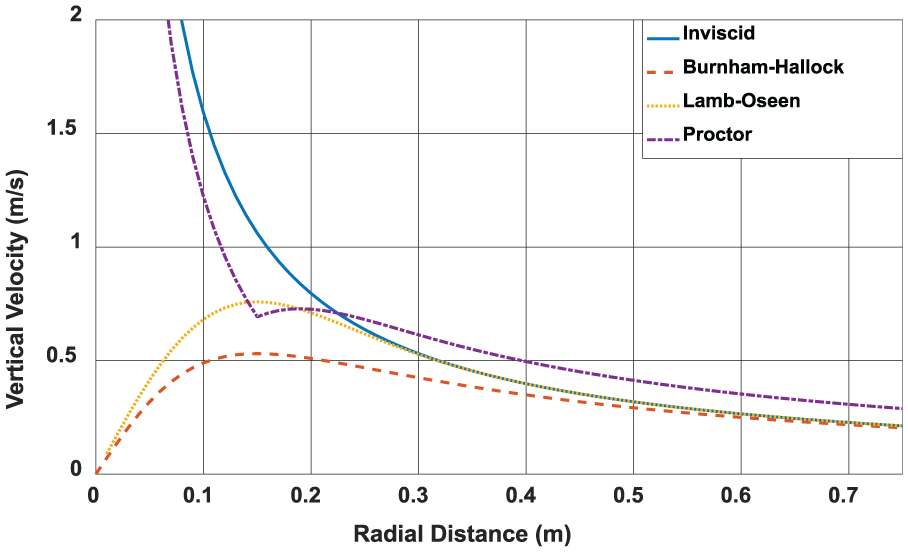
Variation of vertical velocity with radial distance.
In the majority of cases, the inviscid model is proposed, because it has the simplest formation, on the other hand, it could accurately describe the real vortices as other model. While in very close formation simulation, such as rotor UAV formation flight, the peak vertical velocity of the vortices should be considered, in this condition, Burnham–Hallock model and Lamb–Oseen are best choice.
The principle of wind affects the UAV
The viewpoint of velocity
The airspeed is a prerequisite for the dynamic model of an UAV, and if the UAV keeps static, all aerodynamic derivatives of the dynamic model will lose their meaning. The airspeed may be considered as the relative velocity of an airplane to the air, based on the inertial coordinate system,

The projection of

where


The values of some aerodynamic derivatives in the mathematical model of the UAV will be affected by the angle of attack
In short, all kinds of winds change the airspeed of the UAV, thus changing the angle of attack and sideslip angle, which affects the values of aerodynamic derivatives, and finally causes disturbance to the UAV’s resultant force and resultant torque.
Generally, the most popular way to describe the effects of winds on UAV is from the viewpoint of velocity. Mathematical models of winds introduced above just illustrate the velocity
Unfortunately, in most conditions, the induced velocity of a certain wind field is nonuniform, like the gust wind field and propeller vortex field, which means the velocity
The viewpoint of force
According to this viewpoint, the effects of the nonuniform part of the flow field are regard as an external force on the UAV. It is a well-known fact that the interaction forces are the essential reason for objects’ kinetic states changing, and the force caused by the air is named as the drag.
In fluid dynamics, drag is a force acting opposite to the relative motion of any object, which has a relative speed with respect to a surrounding fluid, and its magnitude depends on the properties of the fluid and the size, shape, and speed of the object. One way to express this is by means of the drag equation

where
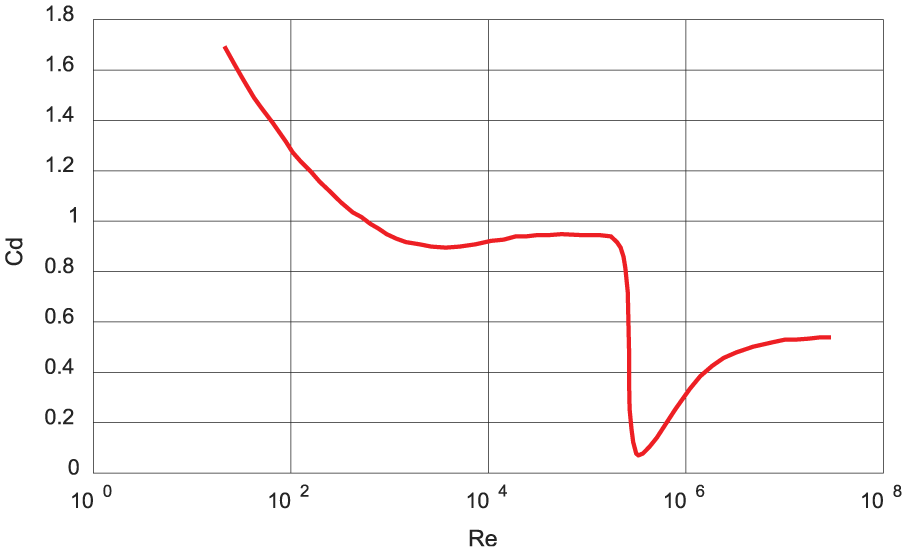
Variation of drag coefficient
Because of its uncertainty, the effects of the turbulent flow are usually studied by means of drag force. According to the spectral function of turbulent flow expressed by Equations (1) and (2), in the body coordinate system, the drag force can be expressed as

where
The viewpoint of the energy transfer process
The influence of wind on UAV can be considered as a process of energy transfer. Wind transfers its kinetic energy to UAV. If the energy transfer efficiency from wind field to UAV exceeds that of the power system and actuators of UAV, the UAV will no longer be controlled and flight safety will be threatened. The higher the wind speed is, the higher the efficiency of energy transfer is, because of the higher kinetic energy of each air molecule. 15 If the wind field has a moderate energy scale, UAV will be able to keep their fly states by appropriate control law.
When the change of flight altitude is very small, the change of UAV kinetic energy caused by potential energy will be very small compared with the kinetic energy of UAV themselves. Neglecting the changing of the potential energy of UAVs, influence of the wind field on UAV can also be explained by momentum theory.
Assuming that the UAV is affected by sidewind, the mass of the UAV is m, the effective windward area is S, the longitudinal speed of the UAV is
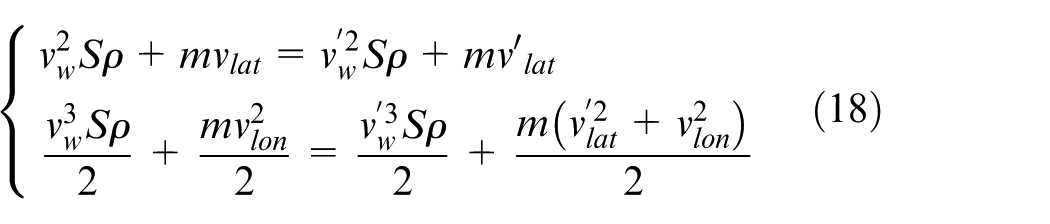
where the air density is obtained as
By eliminating the term
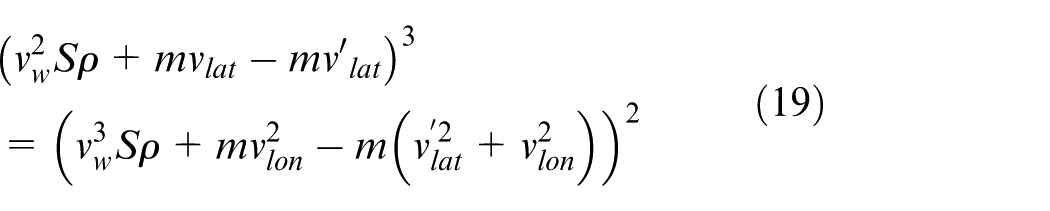
When analyzing the influence of UAV mass m and longitudinal velocity
Simulation and analysis
To show the effects of different wind fields on UAV, some simulation tests have been implemented. The cruising speed of the small UAV is 13 m/s, and the test time are 20 s. In all these simulation tests, only primary flight controller is used, but the path controller is not used, so the effects of wind fields on UAV could be presented clearly.
Figure 4 depicts the UAV flight paths in different wind fields. The blue solid line represented the path in no wind condition; it showed the UAV could perfectly fly a straight line. The flight states in this duration are recorded as orange solid line in Figures 5–8 including velocities (u, v, w) in body frame and Euler angles (
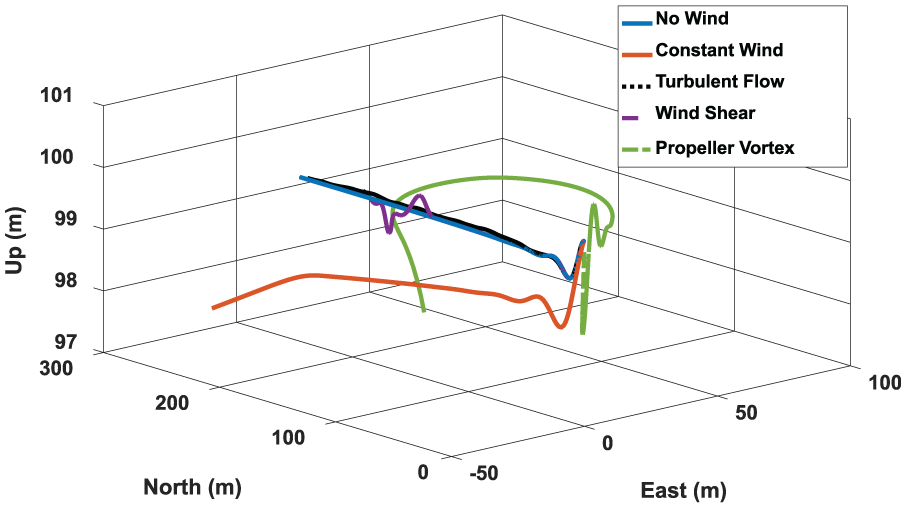
UAV flight paths in different wind fields.
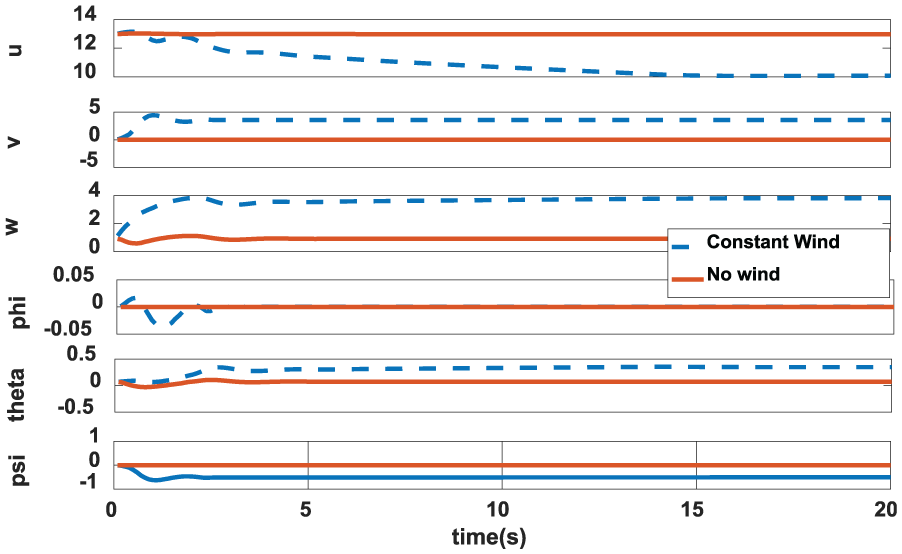
Flight states in constant wind.
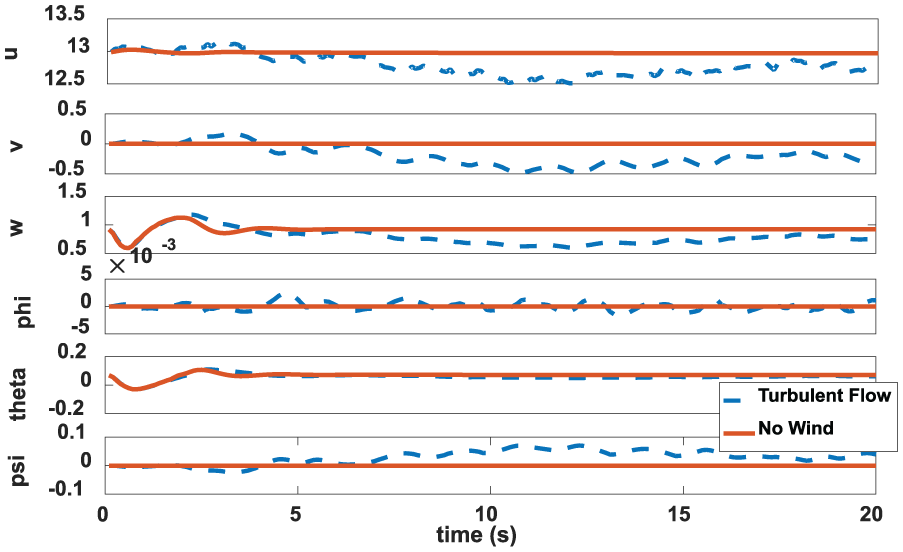
Flight states in turbulent flow.
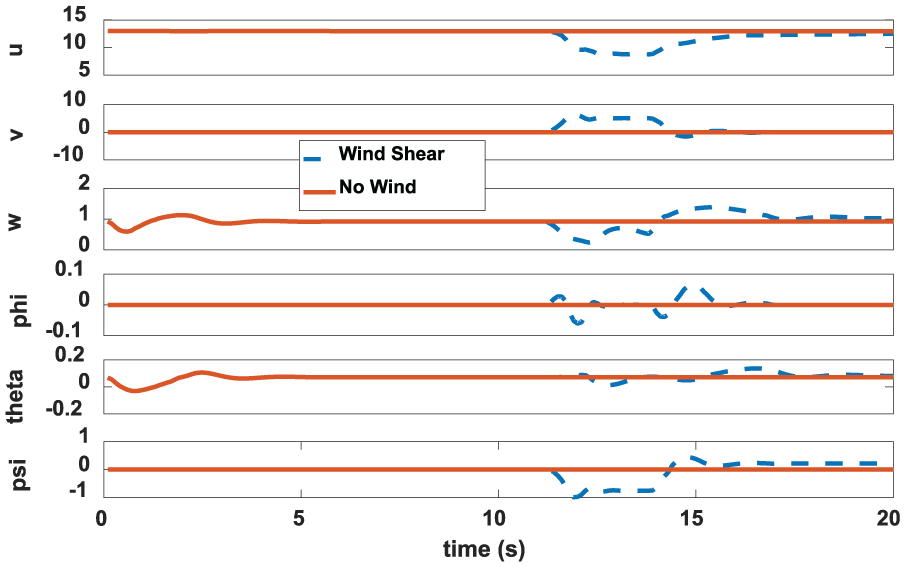
Flight states in wind shear.
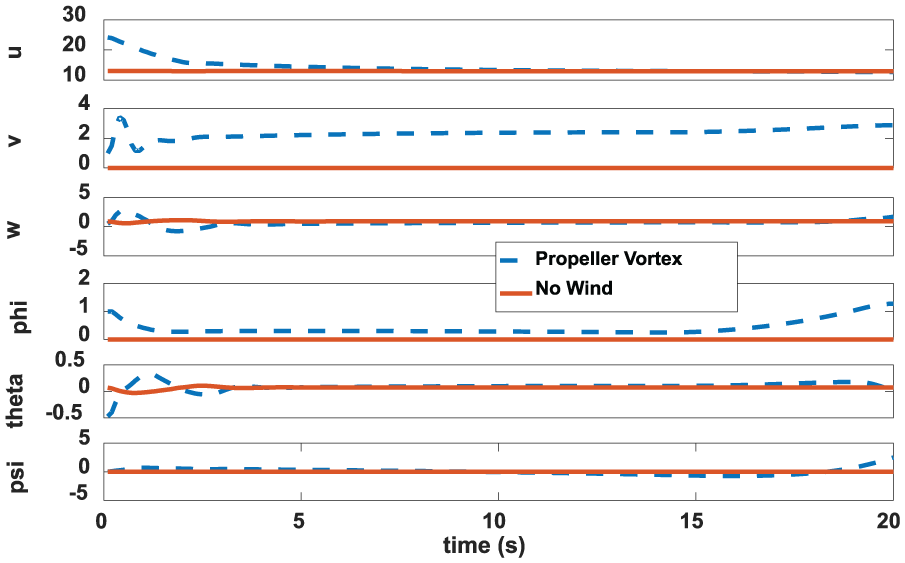
Flight states in propeller vortex.
The orange solid line in Figure 4 represents the path in constant wind. The set constant wind in three directions are 2 m/s, 2.5 m/s, and 3 m/s, respectively. Obviously, the UAV flies far away from the desired path. From Figure 4, it could be known that the velocities are affected by constant wind. To keep UAV stable, some changes happen in pitch angel. Besides, its heading angle is also different with the reference heading angle, which is the main reason for UAV away from the desired path.
The black dash line in Figure 4 represents the path in turbulent flow. It could be seen that turbulent flow may not affect the path a lot. Figure 6 shows that turbulent flow may cause fluctuations on UAV states, so the fuselage and devices on UAV will suffer more challenges.
The purple short line represented the path in wind shear. Wind shear is added from 12th second to 15th second, and the value is 7 m/s. Known from the purple line in Figure 4 and changing states in Figure 7, the UAV has to keep itself stable and might be unable to continue flying along the straight line. Generally, wind shear has greater energy, and UAV are easily out of control.
Finally, green dot dash line represents the path in propeller vortex. The vortex-induced velocity affects UAV is more like a moment act on UAV. Fortunately, the induced velocity is not too large, because the speed of leading UAV is not too big, and the UAV could stabilize itself and avoid dropping off, known from its states in Figure 8. But the UAV cannot fly along the desired path any more. If the induced velocity gets larger, maybe the UAV will be out of control and fall to the ground.
Some advice about the flight simulation and real flight safety about different wind fields
Advice on flight simulation
Winds generally exist in atmospheric environment and do harm to the performance of UAV. Therefore, the adaptive ability and robustness of the controller should be emphasized in designing process. It means different kinds of wind fields which the UAV may suffer must be considered in simulation to test the performance of controllers.
First, constant wind and turbulent flow should be added into simulation test, because they could construct the basic atmospheric environment. Moreover, wind shear will happen in some special conditions, such as night flight, flight in special terrain, flight in special weather, and so forth; so in these conditions, the wind shear should be added into the simulation test. Finally, in terms of propeller vortex, it only exists in formation flight, which means propeller vortex must be considered in formation flight simulation but need not be considered in other conditions.
Advices on flight safety
To sum up, constant wind will make UAV away from their desired path; turbulent flow may cause fluctuations on UAV states, which do harm for UAV’s stability; while wind shear is the most dangerous wind field, which will make UAV out of control temporarily; In terms of propeller vortex, it is a destructive, but regular wind field, just like a double-edged sword.
Constant wind speed for a certain period is predictable, and it could be measured by sensor, so some compensation methods have to be designed based on real wind speed data for flight path controller, and the path error will be removed.
Turbulent flow may cause instability on UAV’s flight states. To deal with these negative effects, more adaptive and robust primary flight controller should be designed, and must base on sufficient simulation test.
The best way to deal with wind shear is to avoid it. Fortunately, some wind shear phenomena, such as frontal wind shear and microdownburst wind shear could be predicted. If the constant wind is too strong or there are serious wind shear phenomena, UAV should avoid these areas or cancel missions.
In terms of propeller vortex, because of its regulation, people could use its energy and help to save fuel after some wind tunnel experiments and numerical analyses. 28
Finally, if UAV have flown into a terrible wind field. It may not be able to track the desired flight path well even almost out of control. According “The viewpoint of the energy transfer process” section, at this time, the stability of UAV can be enhanced by increasing its kinetic energy. The specific method is to reduce the angle of attack of UAV, make UAV reduce its altitude appropriately, and transform the gravitational potential energy of UAV into kinetic energy. Besides, stepping on the gas could also increase the kinetic energy of the UAV, as a result, the antijamming ability of UAV will be improved.
Conclusion
Due to their low flight speed, light takeoff weight, and small size, UAV are more susceptible to wind disturbance than the manned aircrafts. To deal with different kinds of the wind field, the results and contributions are as follows:
The winds, which have great influence on UAV in the low-altitude environment, including the constant wind, turbulent flow, many kinds of wind shear, and the propeller vortex are summarized.
How these kinds of winds affect the UAV are illustrated from three different viewpoints including velocity viewpoint, force viewpoint, and energy viewpoint.
Some simulation results show that constant wind may cause path deviation on UAV; turbulent flow may cause fluctuations on UAV’s states; wind shear are dangerous to UAV; propeller vortex could provide external energy to UAV, but also destructive.
Some proposals are presented on how to add reasonable wind fields in simulation tests for controller designing and on how to avoid the negative effects of wind fields.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This research was funded by College of Automation Engineering Nanjing University of Aeronautics & Astronautics, Nanjing, China.