
Abstract
In this article, an adaptive sliding mode control is used in the framework of fault tolerant control to mitigate the effects of actuator faults without requiring the actuator health information. Since unmanned aerial vehicles are being used in multiple fields such as military, surveillance, media, agriculture, communication and trading sector, therefore it is of vital importance to overcome the effects of actuator faults that can decline system performance and can even lead to some serious accidents. The proposed adaptive sliding mode control approach can handle actuator faults directly without requiring any faults information and adaptively adjusts controller gains to maintain acceptable level of performance. To validate the effectiveness of the proposed adaptive fault tolerant control scheme, it has been tested in simulations using non-linear Benchmark model of Octorotor system and its performance is compared with the optimal LQR control approach.
Introduction
Research on unmanned aerial vehicles (UAV) is increasing day by day due to improvement and development of different control laws. Nowadays, these UAVs are used in different fields like agriculture, commercial, education and also in media sector. 1 Due to the fact that the applications relating to UAVs are increasing rapidly, the need of stable operation of UAVs is on rise.
The fundamental problem with the safe operation of vehicles with wingspan smaller than 1 m is reliable stabilization, robustness to unpredictable changes in the environment and resilience to noisy data from small sensor systems. Autonomous operation of aerial vehicles relies upon on-board stabilization and trajectory tracking capabilities, and significant effort has to be carried on to make sure that these systems are able to achieve stable flight in the presence of actuator faults/failures. These problems are compounded at smaller scale, since as the vehicle is more susceptible to environmental effects (wind, temperature).
Octorotors are the special class of UAVs which have eight fixed pitch propellers where the desired movement is achieved by varying the speed of rotors. Due to its structure, it is capable of vertical takeoff and landing. Numerous control methods have been proposed for an octorotor system, for both regulation and trajectory tracking. The goal is to find a control strategy which allows the controlled states of an octorotor to converge to an arbitrary set of time-varying reference signals. Many previous works, for example, by Sadeghi et al., 2 Benzaid et al., 3 Argentim et al., 4 and Khatoon et al., 5 have demonstrated that it is possible to control the octorotor using linear control techniques by linearizing the dynamics around an operating point, usually chosen to be at the hover state. However, a wider flight envelope and better performance can be achieved by using non-linear control techniques. Within these non-linear methods, for example, back-stepping, 6 sliding mode control (SMC) 7,8 and feedback linearization 9 have been demonstrated to be effective for UAV control.
In the past, the control methodologies such as PID controller and Kalman filter 10,11 were very successful in industry with wide range of applications. However, control methods that received good attention in last couple of years are robust and adaptive control. 12 –14 These controllers are motivated by the need for the safety purpose of different critical systems such as aircraft, chemical plants and nuclear power plants, which require such control systems that can deal with various changes in the dynamics of the plant. Robust control technique such as SMC has been extensively used in recent years. 15 –18 SMC technique is considered as a powerful tool to design controller for uncertain systems. SMC provides the robustness against the matched uncertainty and external disturbance. In Yang and Kim, 19 SMC technique was applied to non-holonomic wheeled mobile robots to achieve asymptotic stabilization to the desired trajectory. The robustness of SMC scheme was validated experimentally. SMC technique was also applied to unicycle-like robotic in Savkin and Wang 20 to avoid collision with moving obstacles. Moreover, the authors in Sarfraz et al. 21 proposed integral SMC (ISMC) to provide the robust stabilization control of non-holonomic underwater systems. The unknown term through input transformation was computed using adaptive technique. Some recent results on SMC techniques have been applied to control the autopilot system of the ship 22 and attitude tracking control of quadrotor system in Promkajin and Parnichkun. 23
A robust fault tolerant scheme was proposed in Chakravarty and Mahanta 14 for non-linear systems affected by actuator faults. The controller implemented employed an adaptive second-order sliding mode scheme integrated with the back-stepping technique, retaining the benefits of both the techniques. The proposed scheme ensured robustness towards linearly parametrized mismatched uncertainties and also ensured that the proposed controller yields enhanced transient performance with no chattering in the control input in comparison with a dedicated back-stepping or sliding mode controller. Neural networks approach has also been used in the literature. As discussed in Amezquita et al., 12 an adaptive dynamic surface control scheme for a class of MIMO non-linear systems with actuator failures and uncertainties was presented. In the proposed control scheme, the dynamic changes and disturbances induced by actuator failures were detected and isolated by means of radial basis function neural networks, which also compensated system uncertainties that arise from the mismatch between nominal model and real plant. In Fan et al., 13 the adaptive control methodology was discussed for a class of uncertain systems in case of stochastic actuator failures. In this scheme, some knowledge has been established on basis of Markovian variables and then back-stepping control technique was employed for the adaptive compensation of the actuator failures. The authors in Hongzeng et al. 24 have considered the combination of SMC with control allocation for the fault tolerance of a UAV system, whereas in Chakravarty and Mahanta, 25 a fault tolerant control (FTC) scheme was proposed to improve the transient behaviour of an aircraft after actuator faults. In Semprun et al., 26 an actuator FTC scheme was considered for a class of non-linear feedback linearizable systems.
FTC schemes considering ISMC have been recently proposed for state feedback and output feedback in the literatures. 27 –29 All these techniques require FDI scheme, wherein FDI scheme was used to estimate the effectiveness levels of the actuators because this information was explicitly used. Recently in Zhong et al., 30 an overview of the tilt rotor UAV was presented where the concept and some typical platforms while focusing on various control techniques is discussed.
In the proposed solution of this article, a FTC scheme is introduced without requiring any fault information and can effectively tolerate actuator faults. To cope with the sudden changes in system dynamics due to actuator faults, an adaptive SMC approach is used, to make sure that regulation of the sliding mode is not disturbed. The proposed adaptation law adjusts the controller gains by taking into account the magnitude of the actuator faults. The proposed adaptive FTC scheme is tested using different fault scenarios and is compared with the optimal LQR controller to show its effectiveness.
In this article as in Bouabdallah and Siegwart,
6
the following assumptions are made: The structure is rigid and symmetric. The centre of gravity lies at the origin of the body axis reference frame. The inertia matrix is diagonal. The propellers are rigid. Actuator lag is considered negligible. The thrust is proportional to the square of the speed of the rotor. The drag is proportional to the square of the speed of the rotor.
The article is structured as follows: First, the non-linear dynamic model of an octorotor is presented and then afterwards the second section will comprise detailed design of different adaptive SMC laws specifically: altitude control law, x-y translation and attitude control laws. In the third section, simulation results are shown to validate the proposed FTC scheme. The fourth section provides the concluding remarks.
Description of non-linear dynamical model
The non-linear state space model of an octorotor system in the presence of actuator faults/failures can be represented as

where

and

The diagonal weighting matrix

where the states

The inputs of the system are

where
In order to achieve desired x-y translation, the control variables


The desired expressions for


The parametric values for the model are taken from the study by Weidong et al. 8 and are given in Table 1.
System parameters. 20

Controller design
This section explains the design procedure of an adaptive sliding mode controller. The design process is simplified by assuming that perturbation over hover state are small, therefore it is assumed that
Design of an adaptive sliding mode controller
The controller design is based on the nominal fault free system which means that while designing the controller, it will be assumed that

where
In the design process, the controller for translational motion will provide desired roll and pitch angles depending on the desired values of x and y. These angles will be provided to the attitude controller which will compute roll torque
Altitude controller
An altitude controller provides the overall thrust

Consider the tracking error between state

Define a sliding surface as

By taking the time derivative of equation (11) and putting values of

In order to find the control law such that the motion along the surface

By taking the time derivative of

Consider the control law

where

and

where

where

where 

Design parameters for adaptive SMC.

SMC: sliding mode control.
Therefore equation (14) becomes

It is clear that
x-y translation
The x-position of an octorotor can be described by the following differential equation as

The tracking error between state

Define a sliding surface as

By taking the time derivative of (25) and putting values of

To show that the motion along the surface

By taking the time derivative of

Consider the control law for

where

and

where

where

By putting value of

Therefore equation (28) becomes

It is clear that
Define a sliding surface as

where the tracking error between state

In a similar fashion, the control law for the

where

and

where

where

From x-y translation, the desired
Attitude controller
Desired roll

where

Define a sliding surface as

Taking the time derivative of (45) and putting values of

The control law for the roll torque is defined as

where

and

where

where

where the values of the design parameters

Taking the time derivative of

By substituting the value of

Therefore equation (53) becomes

It is clear that
The pitch dynamics of an octorotor can be described by the following differential equation as

The tracking error between state

Define a sliding surface as

Taking the time derivative of (58) and putting values of

To show that the motion along the surface

Taking the time derivative of

Consider the control law for the pitch torque

where

and

where

where

By putting value of

Therefore equation (61) becomes

It is clear that
The yaw dynamics of an octorotor can be described by the following differential equation

The tracking error between state

Define a sliding surface as

Taking the time derivative of (71) and putting values of

To show that the motion along the surface

Taking the time derivative of

Consider the yaw torque

where

and

where

where

Finally by putting value of

Therefore equation (74) becomes

It is clear that
The overall FTC strategy is shown in Figure 1.

Schematic of overall FTC strategy. FTC: fault tolerant control.
Design of an optimal LQR Controller
In this section, an optimal LQR controller approach is adopted to design the altitude, x-y translational and attitude controllers.
33
These controllers are then tested on the non-linear benchmark model of an octorotor. While designing the altitude controller, the state vector

The designed altitude control law is

where

The designed control law for x-y translational motion is

where

Based on the control law in (83), the desired values of

where

Simulation results
Simulation results presented in this article are based on a non-linear octorotor model taken from Victor et al.
34
The efficiency of the proposed adaptive FTC approach is tested by introducing actuator faults on each rotor. In this section, three fault scenarios are considered: 10 25 50
In Figure 2, 3D manoeuvering of an octorotor is shown for both fault free and faulty condition, where fault free manoeuvering results using the proposed adaptive SMC approach are shown in Figure 2(a). The starting point of the flight is [0,0,5] and after going through manoeuver it comes back at the same point. Similar manoeuver was considered after introducing 50

3D manoeuvering of octorotor: (a) fault free and (b) 50% fault.

x, y, z and psi states during faulty condition: (a) x-position for 10%, 25% and 50% reduction in actuators effectiveness; (b) y-position for 10%, 25% and 50% reduction in actuators effectiveness; (c) yaw angle for 10%, 25% and 50% reduction in actuators effectiveness; and (d) altitude-position for 10%, 25% and 50% reduction in actuators effectiveness.
In Figure 3,
In Figure 4, AMGs are given for altitude and attitude controllers. In Figure 4(a), AMG of T1 for all the three scenarios are shown and when fault occurs, it gives overshoot and after that adjusts itself and then maintains itself according to the magnitude of fault. In Figure 4(b) and (c), AMG of T2 and T3 are shown, respectively, for all the three scenarios and when fault occurs, it gives sudden overshoot and then adjusts itself according to the magnitude of fault. In Figure 4(c), AMG of T4 is shown, it has overshoot at 20 s but after that it maintains its gain according to the magnitude of fault.
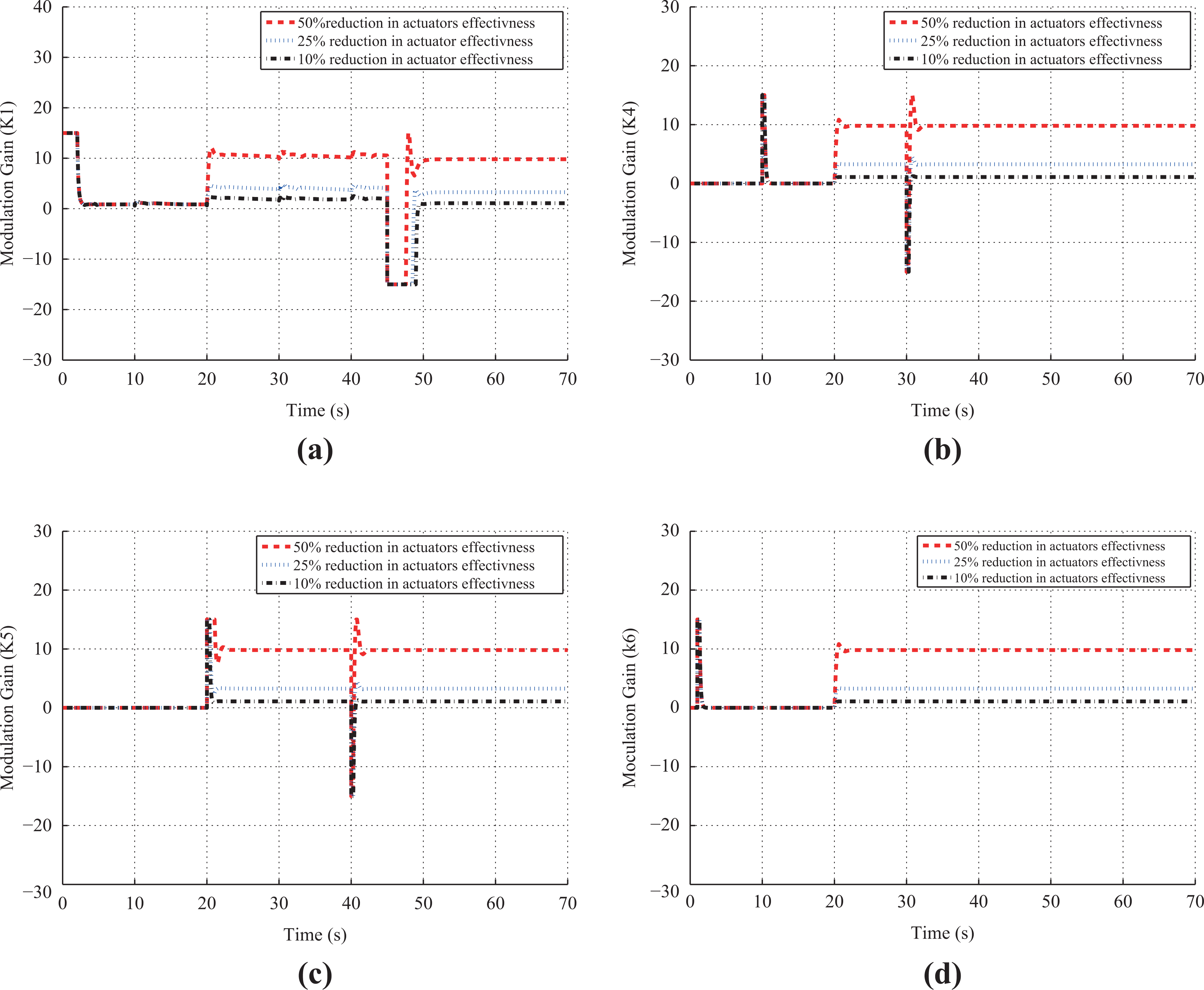
Modulation gains during faulty conditions in respective control laws: (a) modulation gain

3D manoeuvering of octorotor: (a) x-position for nominal and 50% reduction in actuators effectiveness; (b) y-position for nominal and 50% reduction in actuators effectiveness; and (c) altitude-position for nominal and 50% reduction in actuators effectiveness.
In Figure 5, an optimal LQR controller approach is adopted to demonstrate the tracking performance of
Conclusion
In this article, an adaptive FTC scheme is proposed which uses adaptive features of SMC in the framework of FTC. Incorporation of SMC in the passive FTC framework maintains an acceptable level of closed loop performance and has the ability to adjust feedback gains and adaptively tolerate the actuator faults in octorotor system. A range of actuator fault scenarios are considered in simulations, for validation purposes on the non-linear octorotor benchmark model. The simulations result show the effectiveness of the proposed scheme. The simulation results on a octorotor benchmark show fast convergence and demonstrate excellent FTC features of the scheme while comparing with the optimal LQR approach.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work reported in this article was supported by the National Natural Science Foundation of China (Grant No. 61672080).