
Abstract
This article concerns the problem of event-triggered observer-based output feedback control of spatially distributed processes under the autonomous operation of an unmanned aerial vehicle. The specific spatially distributed process is modeled within the distributed parameter systems framework. To control the considered distributed parameter system efficiently, we first estimate the states with an observer based on the measurement information from sensors. Then, an event-triggered observer-based controller is designed, which can reduce the frequency of signal transmissions between the observer and the controller. In contrast to normal sampled-data controller that is updated periodically, the event-triggered controller is updated only when an “event” happens. Moreover, the Zeno behavior is also excluded by proving there exists a lower bound for interexecution time. Numerical simulations are finally presented to illustrate the effectiveness of the proposed control method.
Introduction
Over the past few years, research on sensor networks have attracted increasing attention from many researchers in control fields. 1 –3 In particular, estimation and control in sensor networks are of significant importance and have received many attempts. 2,4,5 Note that the available techniques are suitable for finite dimensional systems, which are modeled by ordinary differential equations. However, many engineering systems belong to spatially distributed processes with states evolving along both time and space, which are commonly described by distributed parameter systems (DPSs). 6
Many works on DPSs have been done based on different control methods. 6 –11 In the study by Kim and Bentsman, 7 two robust control laws were employed to stabilize a class of DPSs with spatially varying parameters and distributed sensing and actuation to encompass disturbance rejection capability were explored. King et al. 8 addressed an adaptive output feedback synthesis approach to design reduced order controllers for a large-scale discretized system of DPSs. For spatially varying processes, Demetriou 9 provided an adaptive scheme to design spatially distributed consensus filters that can eliminate the disagreement among themselves in a sensor network. While the control goals in the above contributions were achieved via continuous communication, intermittent communication at sampling instants is more realistic due to computational controller realization. 12 Recently, in contrast to such periodically sampled control schemes, event-triggered control (EC) has become hot research topics and drawn considerable attention, 13 –16 because it may allow to significantly reduce the usage of the communication channel. For instance, distributed event-based control approaches have been successfully applied to analyze and design cooperative controllers in multiagent systems. 17 –19
Compared to time-triggered periodic control, the EC possesses the prominent advantage of reducing communications. 13 The important technology of sensor/actuator networks, consisting of flight vehicles 20,21 or mobile agents, 18,19 provides radically new communication and networking paradigms with many new application. 22 Nevertheless, most of the achievements focus on finite dimensional dynamical systems, the mathematical models of which are expressed by the ordinary differential equations, while research on the problem of EC for DPSs with guidance of unmanned aerial vehicle (UAV) or mobile actuators are rare.
The primary goal of this article is to discuss the estimation and control problem in spatially distributed processes under the autonomous operation of a UAV and handle the problem through an event-triggered observer-based output feedback control strategy providing additional flexibility and improvement in communication. An observer through the UAV is designed to estimate the states of the DPSs. Based on the state estimates, an event-trigger condition is provided to determine when the control information can be transferred to the actuator. To analyze whether the estimation error is asymptotically convergent or not, a proper Lyapunov function is constructed. Finally, the proposed control method is applied to a spatially distributed process described by one-dimensional partial differential equation through computer simulations.
This article is organized as follows. In the second section, we give the mathematical framework for DPSs. The third section serves to derive the designed observer and event-triggered controller. The fourth section gives the global uniform ultimate boundedness and minimum interevent time (MIEI). The fifth section addresses numerical simulations where the proposed control method is compared to the normal sampled-data control (SC), and finally, conclusion remarks are given in the last section.
Mathematical formulation
Consider a diffusion process modeled by a parabolic DPS, given by

where a1, a2 > 0,
The spatial distribution b(x; xa(t)) is assumed to be

where xa(t) and ε > 0 are the position and the spatial support of the mobile UAV, respectively.
The measurement output on the DPS (1) is given by

where

where
It is convenient to bring the aforementioned systems (1) and (3) in an abstract framework. Let
Using the representation, the parabolic operator

where

Following the study by Demetriou10 and Demetriou and Hussein,
23
the operator

and

for
The input operator

or

Similarly, the output operator
Then, the evolution equation of DPS (1) with (3) can be rewritten as

State estimation process and event-triggered controller
The estimation of spatially distributed processes is achieved by a UAV gathering information from m sensors. We design a Luenberger observer as follows

where
Assumption 1
There exists a bounded operator
Remark 1
With the help of the observability condition in assumption 1, the well posedness of (7) can be established using the fact that
Next, we introduce an event-triggered observer-based control scheme whose structure is depicted in Figure 1. The event-triggered threshold is monitored by event detector that determines when to transmit the newest state estimates from the observer to the controller. Specifically, let

for all k ∈ {1, 2, … }, where
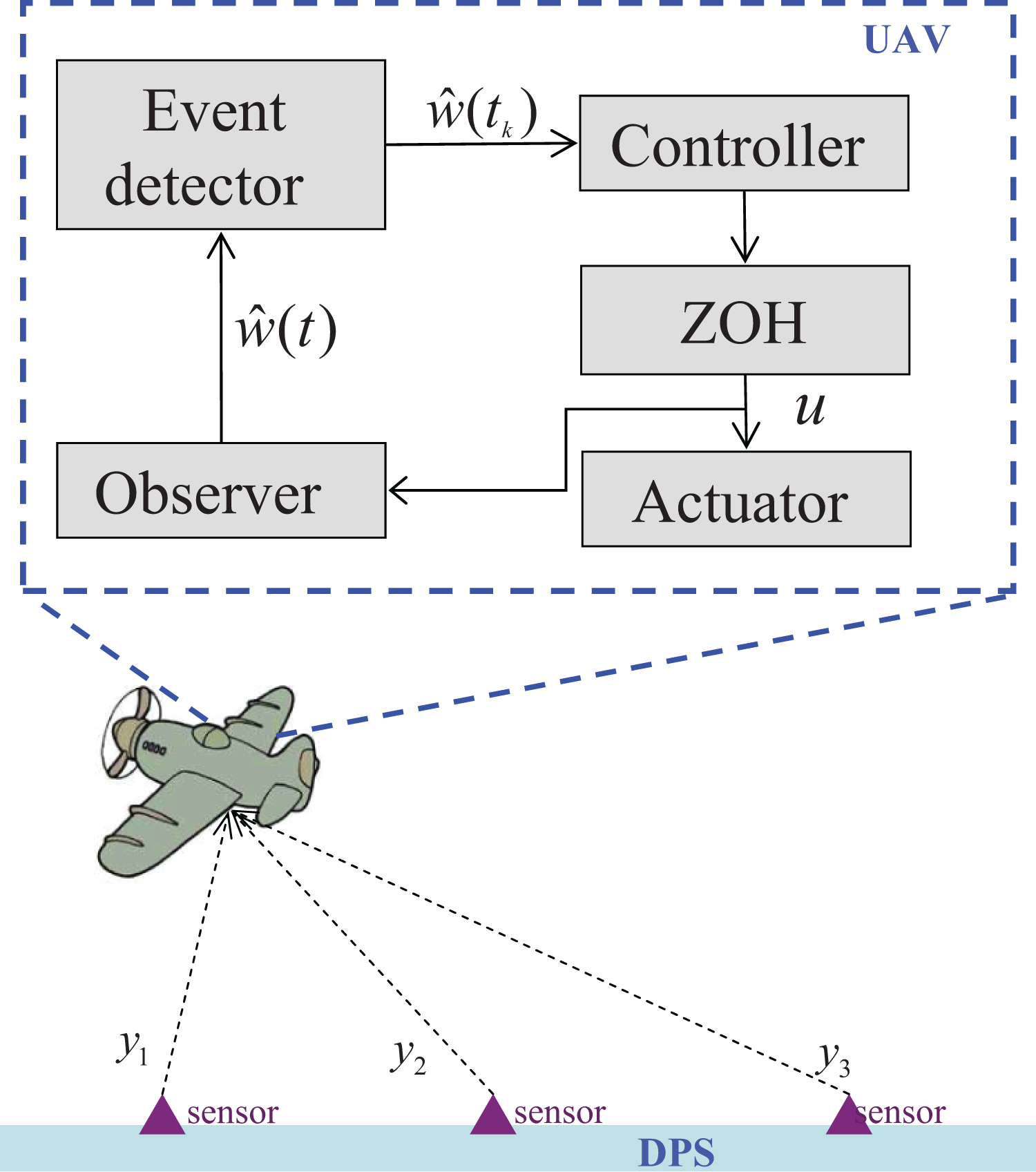
The structure of the event-triggered control scheme. DPS: distributed parameter system; UAV: unmanned aerial vehicle; ZOH: zero-order holder.
Based on the observer states, the EC input is designed as

for
Assumption 2
There exists a bounded operator
Assumption 3
Suppose that
For simplicity, the operator
This work aims to determine an MIEI Tmin and improve the estimation and control performance with guaranteed stability property.
Main results
Define the estimation error

within the time period
Theorem 1
Consider the DPS (1) and its observer (7) with sampling instants determined by (8). Suppose that assumptions 1 and 3 hold, then, the estimation error e(t) of the error system (10) is globally convergent, that is

Proof
Consider a Lyapunov function

Then, the time derivative of V(t) for

where the condition in assumption 3 is used. Then, it follows that

This completes the proof.□
With the control input (9), the actuator in UAV is utilized to control the DPS. In this paper, the actuator and controller are assumed to be collocated and the actuator motion is also event-triggered. When the controller receives the observer states at time instance tk, it can compute the position where the UAV should move to. Let xa(t) be the actuator position, then

which gives the location over the domain Ω with the maximum value of the observer states.
Remark 2
If the actuator is only allowed to move from its current position xa(tk) with a maximum distance ±h, which means that the actuator moves only in

which finds the location of the maximum value of the observer states over the domain
Next, the stability of the controlled DPS (1) will be analyzed. The closed-loop system under controller (9) is written as

for
Correspondingly, the state observer (7) can be derived as

with the initial condition
The following theorem shows the global uniform ultimate boundedness of the states of the system (1).
Theorem 2
Consider the DPS (1) with the event-triggered controller (9) and its observer (7) with sampling instants determined by (8). Suppose that assumptions 1–3 hold, then the states of the system (1) are globally uniformly ultimately bounded, that is

where
Proof
Consider a Lyapunov function

The time derivative of V(t) for

Using the inequality
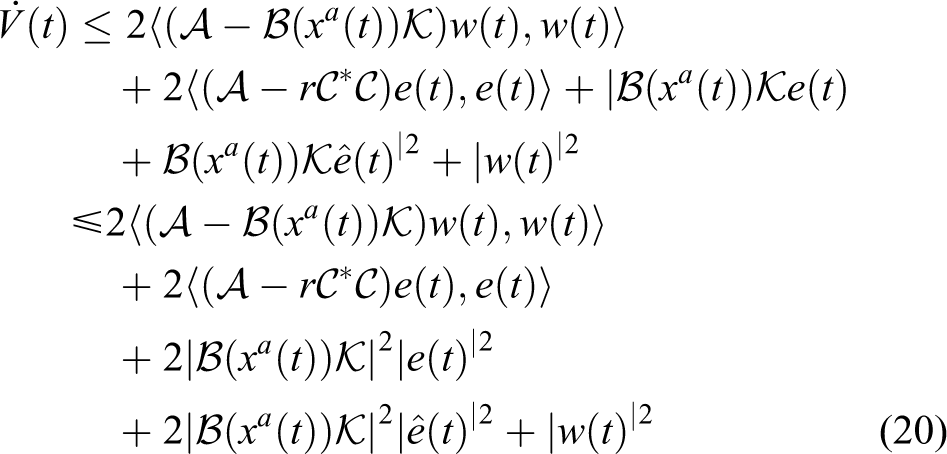
By assumptions 2 and 3, the positive definite operators


where λ and μ are the minimum eigenvalues of
Combining (20), (21), and (22) yields

where
Due to the event-triggered condition (8),

where

which implies that

The proof is completed.□
To exclude Zeno behavior, interevent times should be lower bounded away from 0, which is ensured in the following theorem.
Theorem 3
For the sampling instants in (8), the MIEI defined by

is lower bounded.
Proof
From the definition
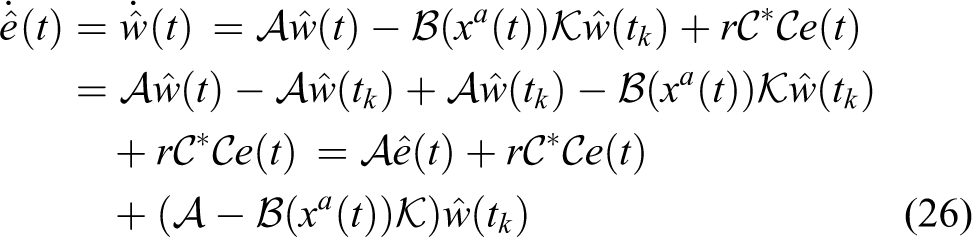
with

By theorem 1,

where
Denote T = t − tk. Then, we have

Combining (28) with (29) gives

According to the event-triggered condition (8), whenever

which implies that the MIEI Tmin (
Remark 3
The results presented in theorems 1–3 are provided for a diffusion process modeled by the parabolic DPS (1), but extensions to second-order DPSs are possible. 11 In this work, the event detector is simply implemented by an event-triggered threshold, but the proposed results can be extended to the situation where different event detectors, such as event-driven detector with exponentially decreasing threshold 15 and sampled-data event detector, 16 are imposed.
Numerical simulations
The example to be presented in this section is a one-dimensional DPS. Both of the results by using the EC scheme and the normal SC will be addressed. The dynamic equation and the initial conditions are, respectively, as follows

where w(t, x) denotes the state of a spatially distributed process with the spatial domain Ω := [0, 1]. The constants α1 = 0.015 and α2 = 0.02 are the parameters of the associated operators. b(x; xa(t)) represents the spatial distribution of the UAV defined in (2) with ε = 0.03.
The measurement output is defined in (3) with m = 3 sensors located in
To apply the event-triggered controller (9), take β = 3.5 and the event threshold value

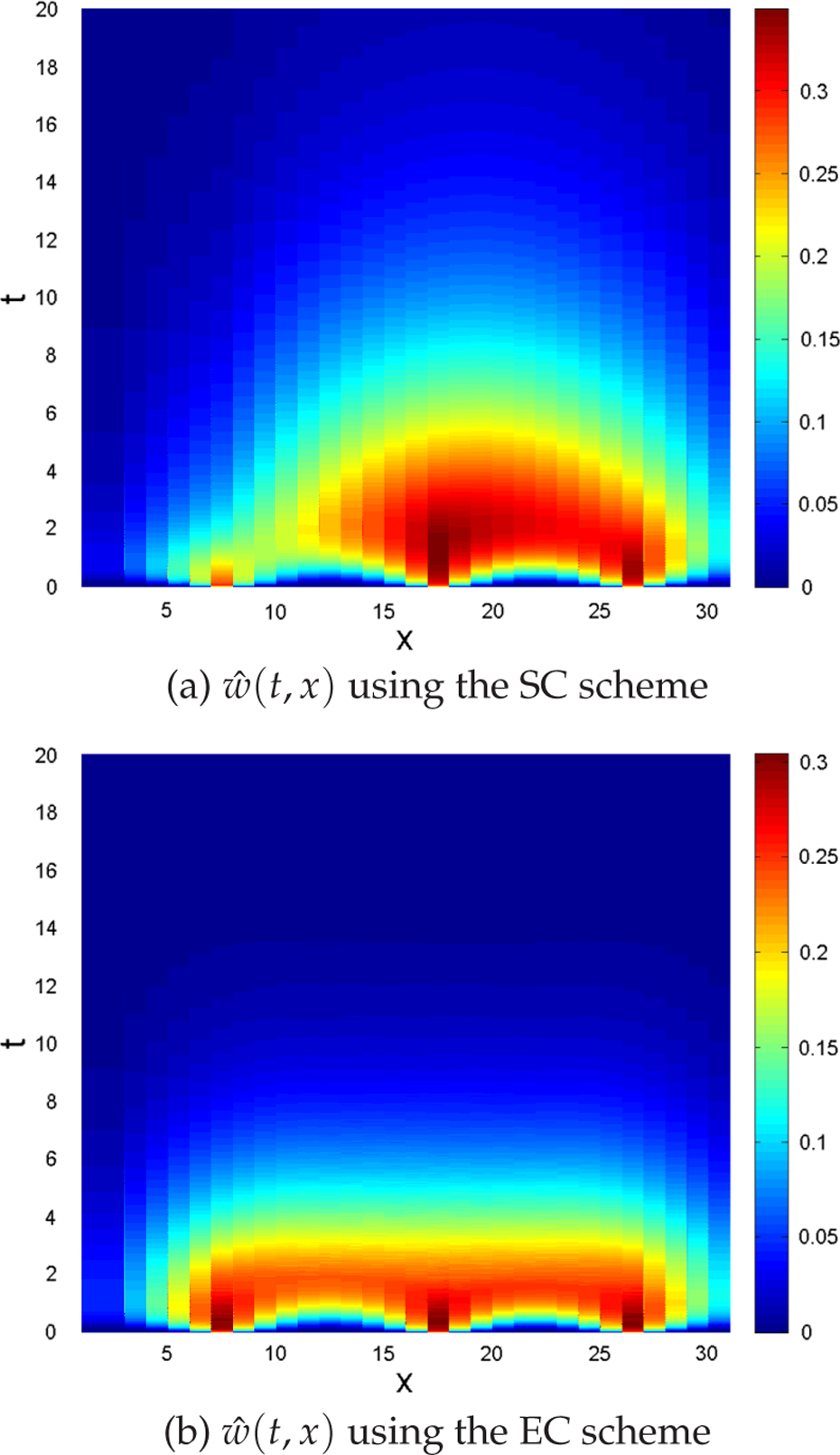
Space–time plots of the system state w(t, x) under two schemes.

Evolution of the L2 norm of the system state under two schemes.
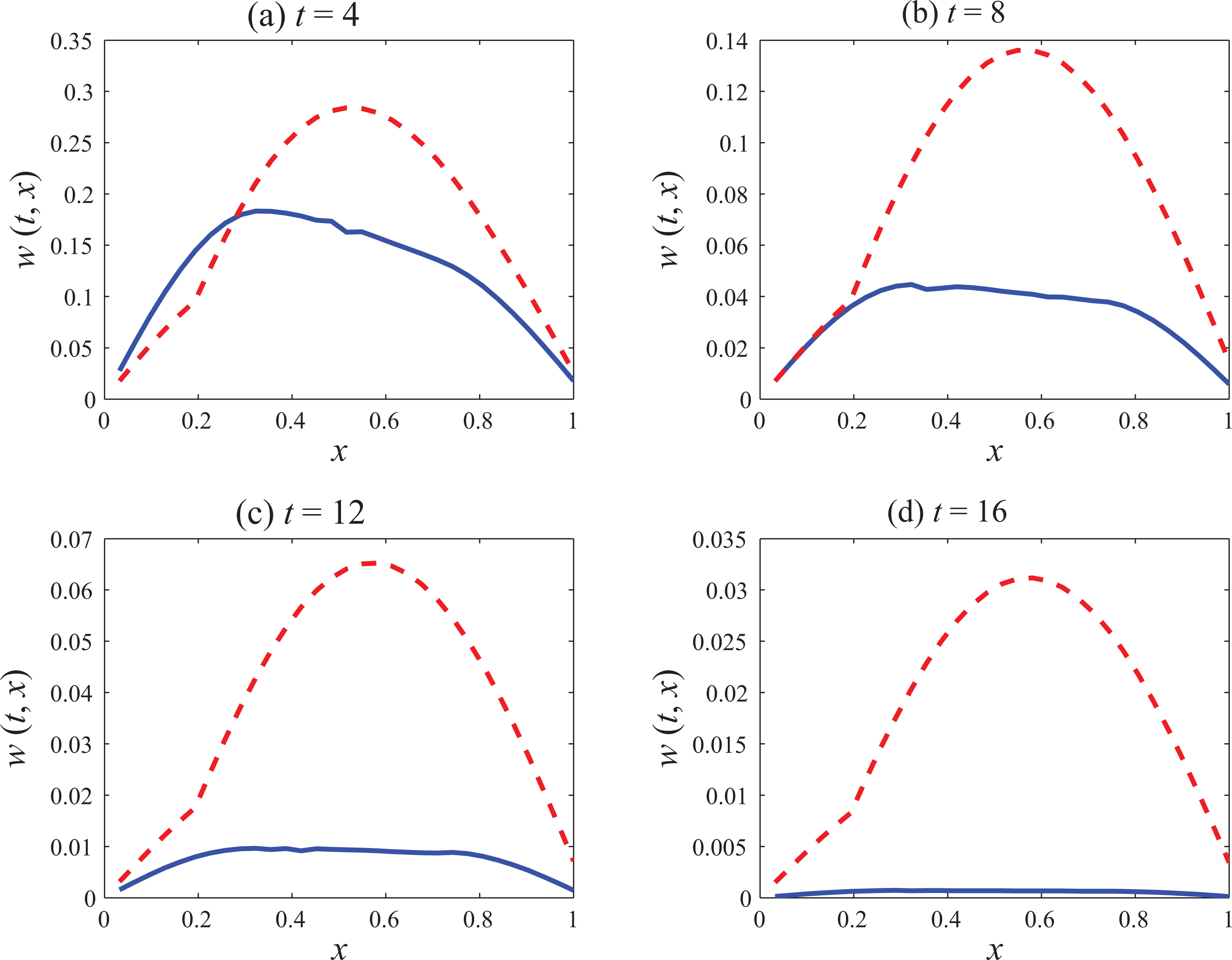
Spatial distributions of the system state w(t, x) at different time instances (EC scheme: blue line, SC scheme: red dashed line). EC: event-triggered control; SC: sampled-data control.

Event instants.
Space–time plots of the estimation state

Evolution of the estimation error |e(t, x)|.
Conclusions
In this proposed EC approach for a class of parabolic DPSs, sensor nodes are located in fixed positions, which are able to measure the output of the system. An event-trigged observer-based control strategy for estimating the state and improving the control performance has been provided. Furthermore, the stability of the closed-loop system is ensured and the MIEI has been analyzed. Finally, an example has been given to corroborate the theoretical results.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (61473136) the Fundamental Research Funds for the Central Universities (JUSRP51322B) and the 111 Project (B12018).