
Abstract
This paper presents the double-layered nonlinear model predictive control method for a continuously stirred tank reactor and a pH neutralization process that are subject to input disturbances and output disturbances at the same time. The nonlinear systems can be described as a Hammerstein -Wiener model. Furthermore, two nonlinear parts of the Hammerstein -Wiener model should be transformed into linear combination of known input and unknown disturbances, respectively. By taking advantage of Kalman filter, disturbances and states can be estimated. The estimated disturbances and states can be considered to calculate steady-state target in steady-state target calculation layer. Moreover, the state feedback control law can be obtained in dynamic control layer. A simple proof for offset-free control is given in the proposed method. The simulation results show that the controlled variable can achieve the offset-free control. It can be seen that the proposed method has better disturbance rejection performance, strong robustness and practical value.
Keywords
Introduction
Model predictive control (MPC) is the most popular advanced control method in industrial control technology and academics, which can effectively overcome the disturbance and uncertainty and easily handle the constrain of controlled variables and manipulated variables.1–5 It is a kind of model-based closed-loop optimization control strategy. The principle of the method is to predict the dynamic behavior of the system and to proceed rolling optimization and to achieve feedback correction of model error.6–9 There are many researches on the MPC method for linear systems. However, all the practical systems are nonlinear in the physical world.10–12 Therefore, in recent years, nonlinear model predictive control (NMPC) has been obtained more and more attention.13–21
As for the NMPC, the accurate nonlinear prediction model is very important. At present, the nonlinear prediction models with block structure are becoming more and more popular, such as Hammerstein model, Wiener model or Hammerstein–Wiener model, which combined the dynamic linear model with the static nonlinear model. These models do not need to know the principle of nonlinear system, which can describe exactly the nonlinear system. Compared with Hammerstein model and Wiener model, the Hammerstein–Wiener model includes two static nonlinear parts and one dynamic linear part, so the model is closer to the nonlinear system than Hammerstein model or Wiener model. Moreover, it is also very effective for the asymptotic tracking and disturbance rejection of nonlinear systems. Nowadays, the NMPC based on the Hammerstein–Wiener model has achieved many research results.22–26
However, disturbances appear in all stages of the control system.27–29 In the control system, the disturbance sources can usually be divided into two categories: input disturbances and output disturbances. The input disturbances are considered to be acting on the input side of control system, which come from the nonlinear characteristics of the actuators, such as valve viscous, and come possibly from the change in operating conditions, such as the flow, level and composition fluctuation of upstream feed. The output disturbances are considered to be acting on the output side of control system, which come from the measurement of sensors. When the control system is subject to these disturbances, it may lead to model mismatch and steady-state deviation. Therefore, the offset-free control of nonlinear system should be worked as the important goal in the controller design. The offset-free character of the control system refers to the capability of controlled variable to asymptotically track the set point. In other words, the steady-state deviation of closed-loop system approaches to zero as soon as possible. 30
At present, an improved “steady-state target optimization + dynamic control” double-layered NMPC is proposed to reject disturbances and achieve offset-free control in control system.31,32 It has three parts, such as prediction and estimation, steady-state target calculation and dynamic control. In other words, the NMPC, which contains steady-state target calculation and dynamic control, is called the double-layered NMPC. In the double-layered NMPC, the appropriate set point should be calculated in the steady-state target calculation layer with satisfying various constraints. Moreover, offset-free control can be obtained by the dynamic control layer very easily.
The double-layered NMPC with disturbance rejection has obtained a lot of research results. Rajamani et al. 33 investigated that the choice of disturbance models does not have an effect on the control performance of closed-loop system. Moreover, the appropriate covariances can be estimated by autocovariance technique. In Li et al., 34 based on double-layered MPC, the target optimization and feasibility of constrained multiobjective multidegree of freedom were studied. In Horváth et al., 35 the double-layered MPC was researched on the offset-free character with unknown disturbances. In Betti et al., 36 for the infeasible reference problem of constrained systems subject to bounded disturbances, a double-layered robust MPC was proposed based on velocity form model. In Zou et al., 37 for the non-square system, the double-layered MPC was proposed. The compatibility issue for the thin system and the optimal solution for the fat system can be tackled in the upper level steady-state optimization. The lower level predictive control algorithm is integrated with the control input target and guaranteed the uniqueness of the steady-state solution for fat system. Wang et al. 38 researched that the Hammerstein model was transformed into a linear model with one known input and unknown input, and a minimum-variance unbiased (MVU) filter was introduced to estimate both the state and the unknown input. Kim et al. 39 takes advantage of a disturbance observer (DOB) for the active/reactive powers of a three-phase alternating current (AC)/direct current (DC) converter. Furthermore, an offset-free MPC was studied. In Dang et al., 40 in order to reject output disturbances and guarantee maximum power captured under the rated wind speed, a new double-layered MPC and new DOB were studied. In Wang et al., 41 for handling unmeasured disturbances with arbitrary statistics, a linear MPC with optimal filters was proposed. As a result, the offset-free control can be achieved by proposed method in the presence of asymptotically constant unmeasured disturbances. In Pan et al., 42 for a double-layered MPC, an on-line constraints softening strategy was given based on the infeasibility analysis of the dynamic controller. All in all, the above proposed approach can obtain offset-free control in the presence of unknown nonlinearity and unmeasured disturbances. However, the input disturbances or output disturbances were only considered in these papers, respectively. In the control system, most of the input disturbances and output disturbances appeared at the same time.
In this article, the double-layered NMPC based on Hammerstein–Wiener model with disturbance rejection is proposed. The nonlinear system should be described as the Hammerstein–Wiener model and the Kalman filter is used to estimate the disturbances and states of the system. According to the estimated disturbances and states, the new steady-state target can be calculated in steady-state target optimization layer. Therefore, the state feedback control law is obtained by solving the algebraic Riccati equation. A simple proof for offset-free control is given in the proposed method. The simulation results show that the proposed method has better performance of disturbance rejection and strong robustness.
Notation
Hammerstein–Wiener model
Consider the following discrete-time nonlinear system

where
The nonlinear system Equation (1) can be approximately described as the Hammerstein–Wiener model. The Hammerstein–Wiener model includes one linear part

Hammerstein–Wiener model.
The linear part

The two nonlinear parts

where
Assumption 1
Consider the Hammerstein–Wiener model Equations (2) and (3); for all given
Assumption 2
Consider the Hammerstein–Wiener model Equations (2) and (3); for any given output
In the vicinity of the working point

where

where
The purpose of the above transformation is that the nonlinear input can be expressed as the linear combination of known input and unknown disturbances. Similarly, in the vicinity of the working point

where

where
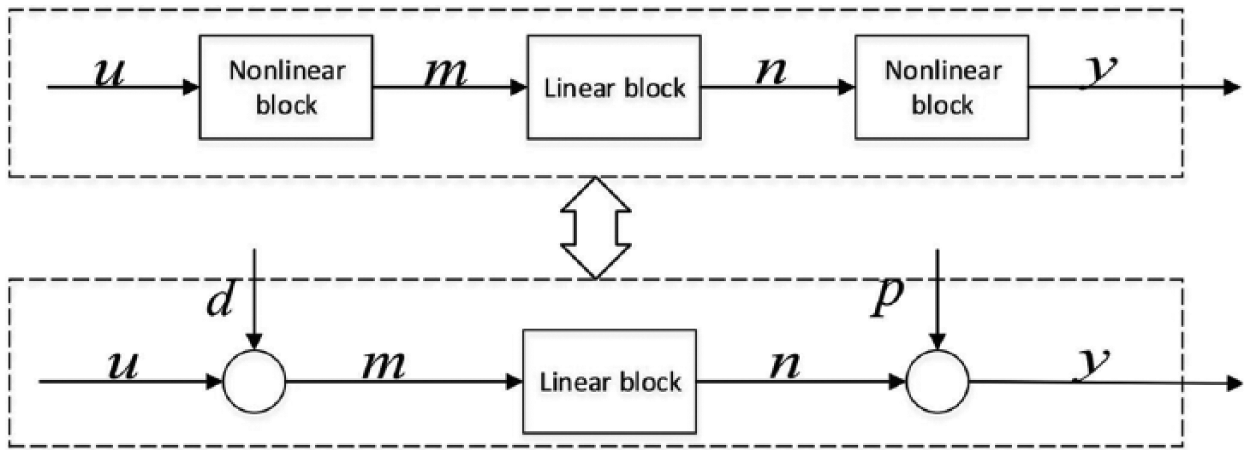
Equivalence between the Hammerstein–Wiener model and linear model with unknown input disturbance and output disturbance.
It should be mentioned that for all given pairs
Therefore, the system Equation (1) can be transformed into the following linear state-space model

where
Double-layered NMPC based on Hammerstein–Wiener model
The double-layered NMPC is mainly composed of steady-state target calculation and dynamic controller. In order to reject the disturbances, it should be added to state and disturbance estimation. Double-layered NMPC based on Hammerstein–Wiener model is shown in Figure 3.
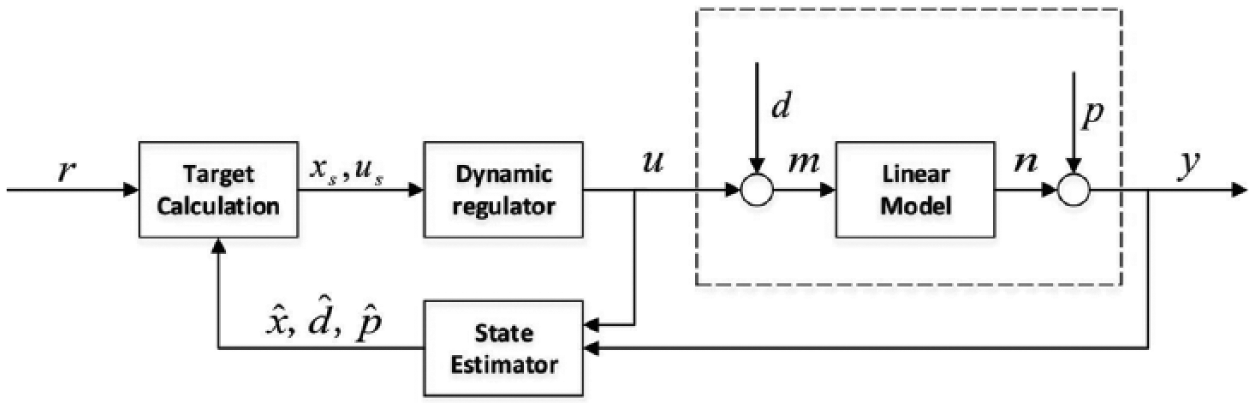
Double-layered nonlinear model predictive control based on Hammerstein–Wiener model.
Assume that the disturbances are constant disturbances

The disturbance models (Equation (9)) are expanded into Equation (8)
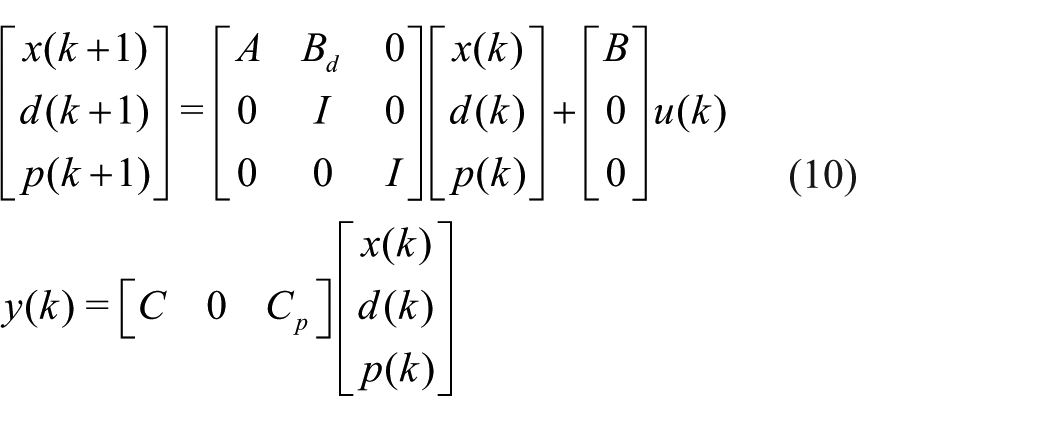
One can get

where
Dynamic control
The performance cost is described as follows
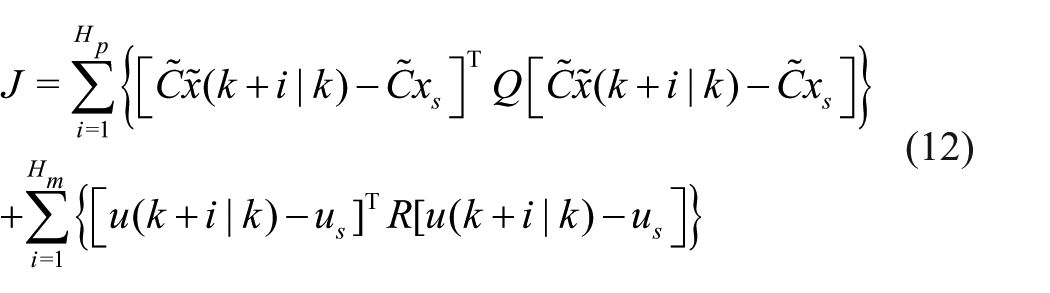
where


Therefore, the performance cost Equation (12) can be rewritten

subject to

This is a classical linear quadratic regulator (LQR) problem. Its state feedback control law is designed as follows

where


Its terminal condition is

Then, it can be obtained that

where
Steady-state target calculation
Steady-state target calculation is an important step of double-layered NMPC. Due to the external disturbances or new input information, the steady state of system may be changed, resulting in steady-state target deviation. Therefore, the new steady-state target


subject to
where
The estimation of state and disturbance
The disturbances include system uncertainty, model mismatch and so on. In order to reject the disturbances, it is necessary to use the DOB to estimate system states and disturbances

where
To estimate the states and disturbances of the system, it is essential to ensure that the disturbances and states of augmented system are observable. Because these states are not necessarily asymptotically stable, the sufficient condition is when the augmented system is detectable.
Theorem 1
The augmented system

where
In addition to the exact modeling of the system, it is important to accurately measure the system output. However, practically, the control system may be susceptible to external uncertainties, such as the aging of the system components. Therefore, in view of the complexity of the industrial environment, it is essential to introduce process noise

where
The accuracy of disturbances estimation is the key to realize the offset-free control of controlled variables. Kalman filter is an unbiased estimation method with simple design. Therefore, the Kalman filter is used to estimate the external disturbances in this paper
where



According to the estimated disturbances, the steady-state target can be recalculated. And MPC can also realize to reject disturbances by using the feedforward compensation control strategy.
Lemma 1
Risfic et al. 44 consider the following discrete linear systems

where
The nonlinear system Equation (1) with the input and output disturbances can be transformed into Equation (8) based on the Hammerstein–Wiener model. Therefore, the offset-free control can be obtained by double-layered NMPC based on the augmented model. The result should be given in the following theorem.
Theorem 2
The system Equation (1) with the input disturbance

where
Proof
According to Equation (8)

As for Equation (23)

Applying to the matrix inversion lemma 45

Then, Equation (35) can be changed that
Assumption 3
The target optimization problem Equation (22) has a unique feasible solution. One can get

Similar to Equations (20) and (34), we have

It is equivalent to
According to Equation (34)
From Equation (42), it can be seen that
1 As for
2 As for
Defining
It is assumed that the system is asymptotically stable, and then

Therefore, it is obtained that
The proof is complete.
Numerical examples
Example 1
The continuously stirred tank reactor (CSTR) is used as the simulation example to verify the effectiveness of the proposed method. Figure 4 depicts CSTR schematic. Consider a CSTR in which the first-order irreversible exothermic reaction
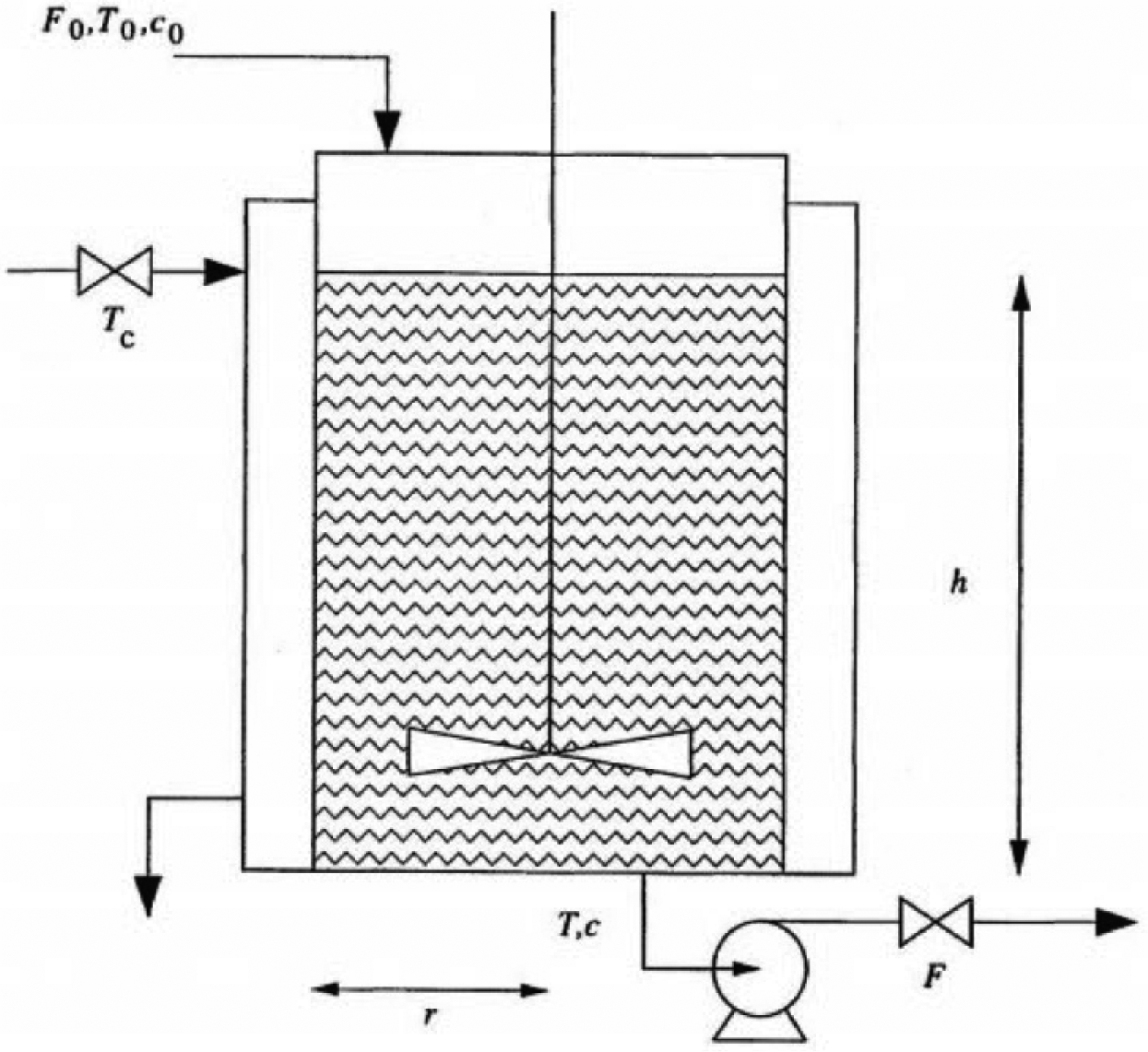
Continuously stirred tank reactor (CSTR) schematic.
The material and energy balance equations are
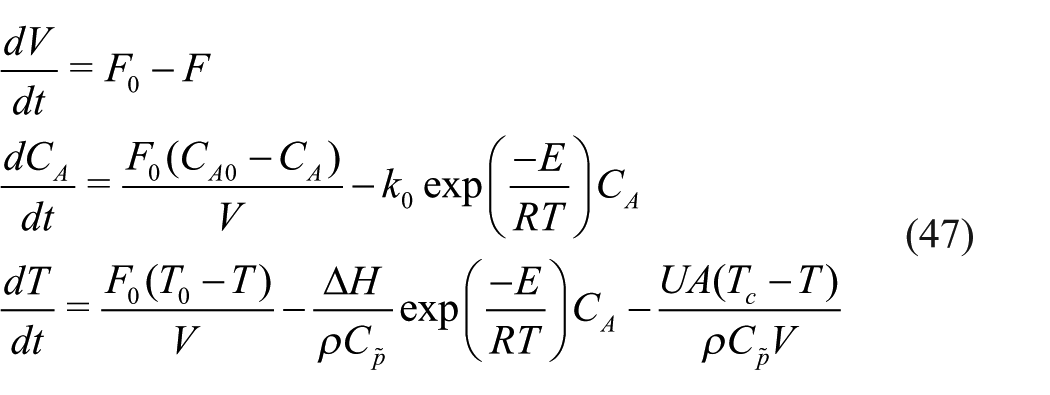
The controlled variable is the molar concentration
The open-loop response of CSTR is shown in Figure 5. It is clear from the picture that the process has strong nonlinear and presenting oscillation. The identification result of system is shown in Figure 6. The error of between Hammerstein–Wiener model output and system model output is shown in Figure 7.
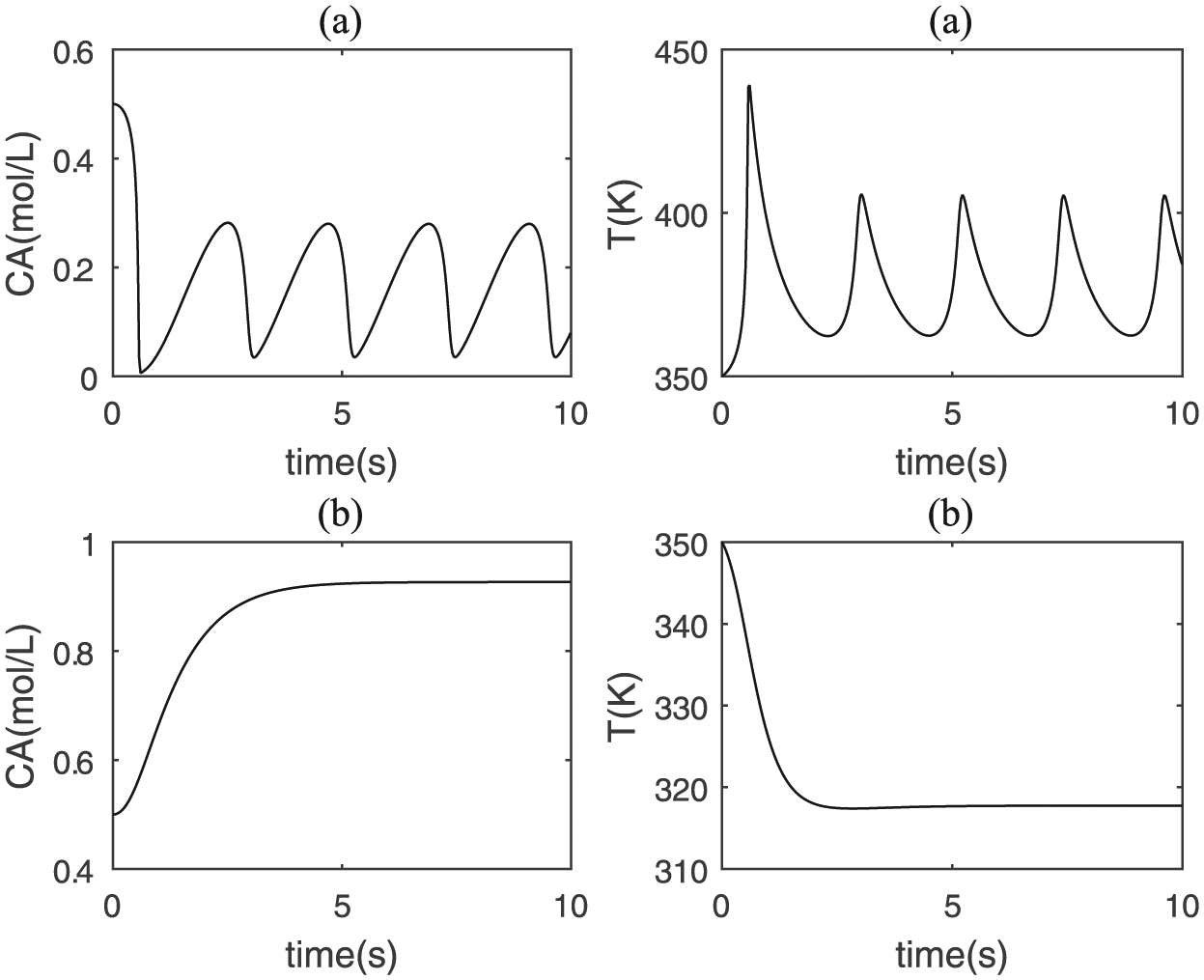
Open-loop responses for (a) +5K and (b) −5K step changes in Tc.
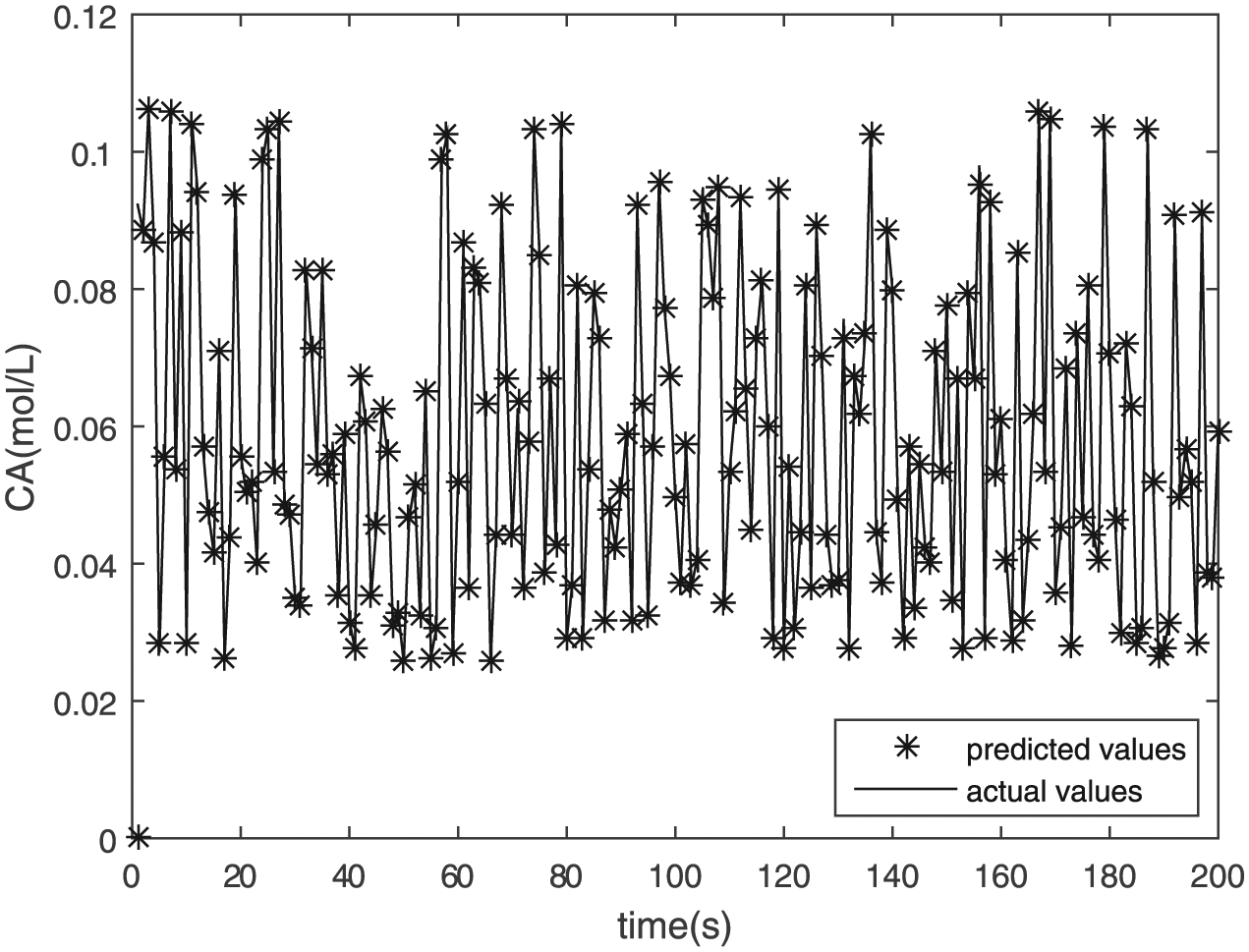
Identification results of CSTR.
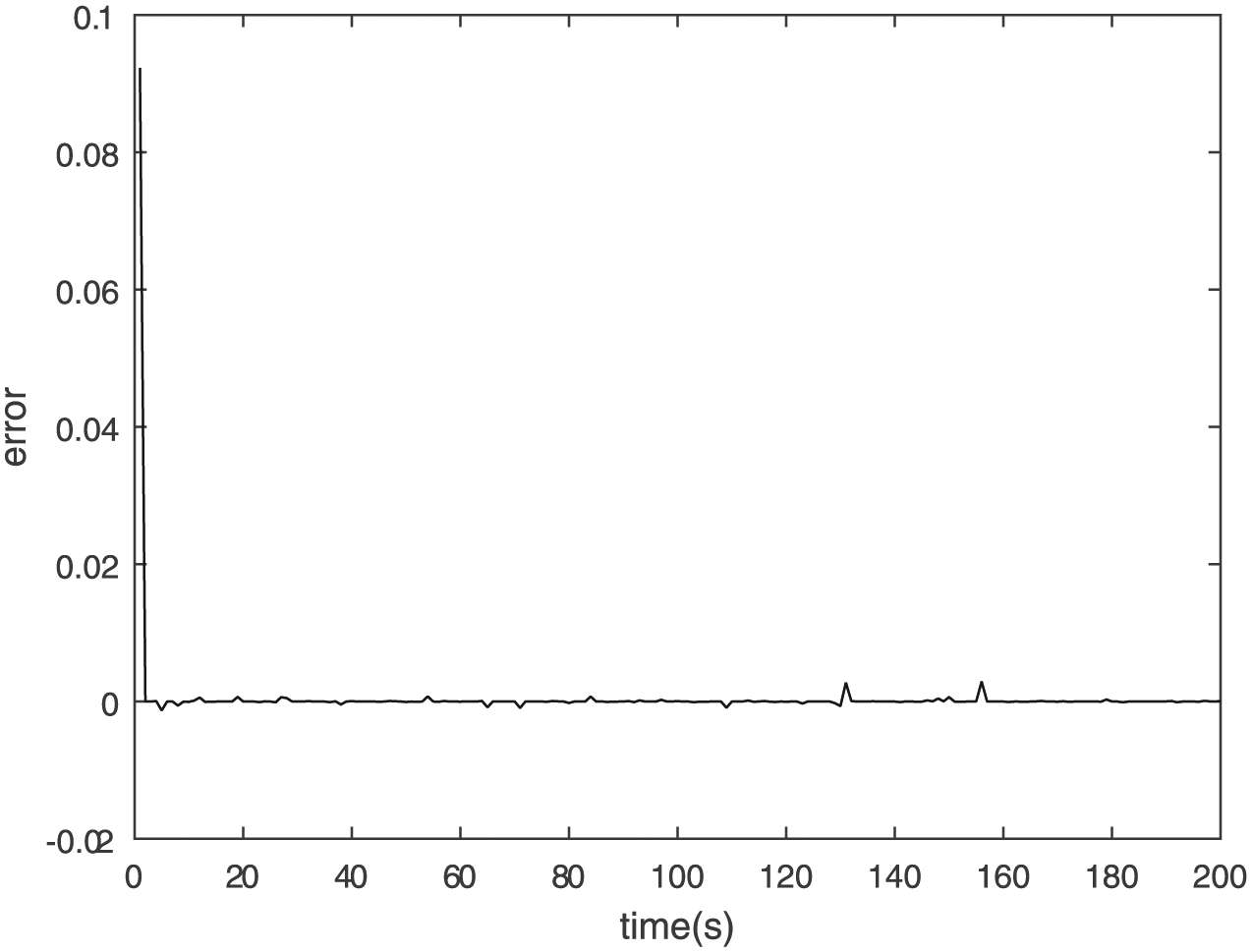
The error of between Hammerstein–Wiener model output and system model output.
Let the state vector

The differential equation of CSTR is used to generate process data through MATLAB. Furthermore, the system matrices can be obtained by using the subspace identification method of system identification toolbox in MATLAB, where
The disturbance models are chosen as
The simulation results are shown in Figures 8–10. Figure 8 shows the output response of closed-loop system. Figure 9 shows the control input of closed-loop system. Figure 10 shows that the closed-loop system subject to the input and output disturbances.
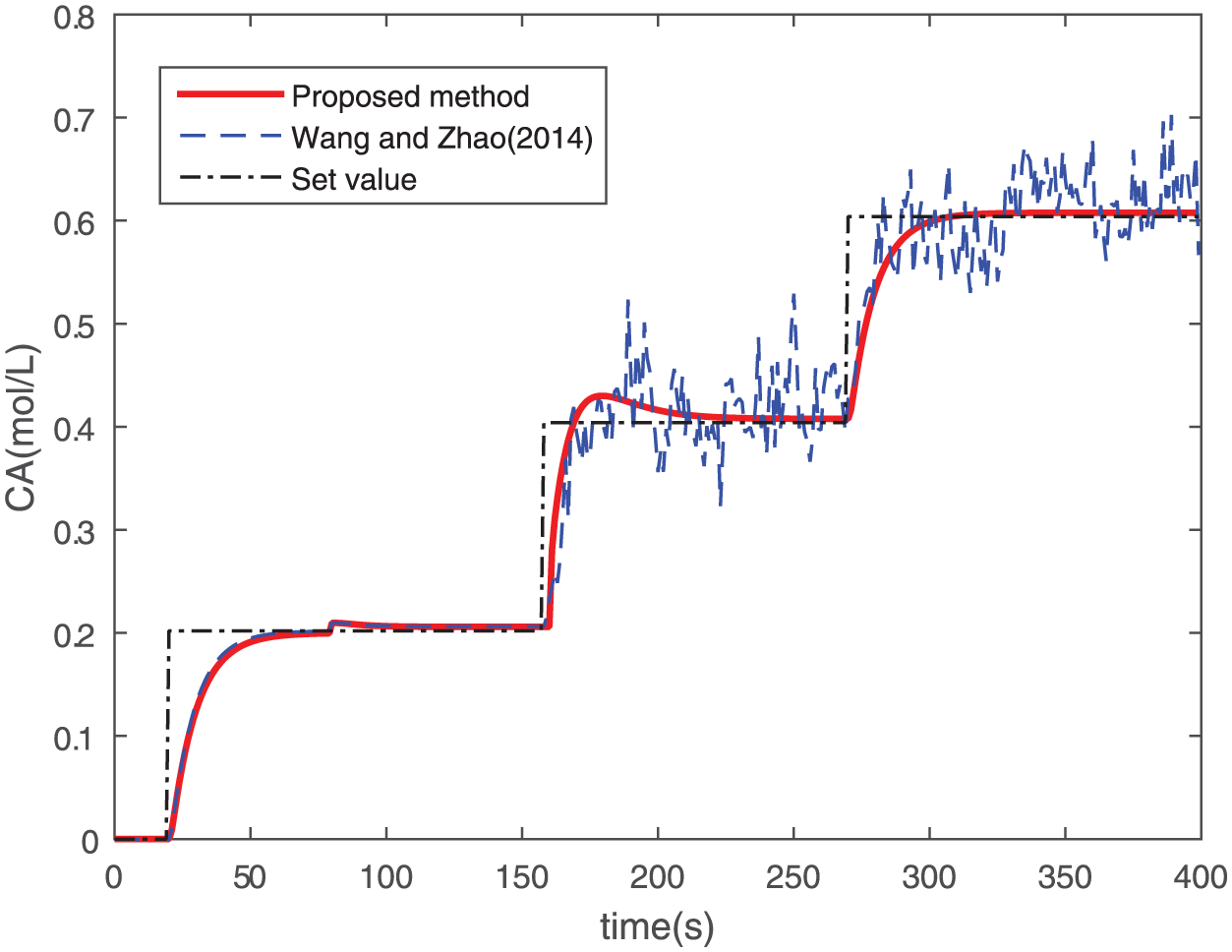
The output response of closed-loop system.
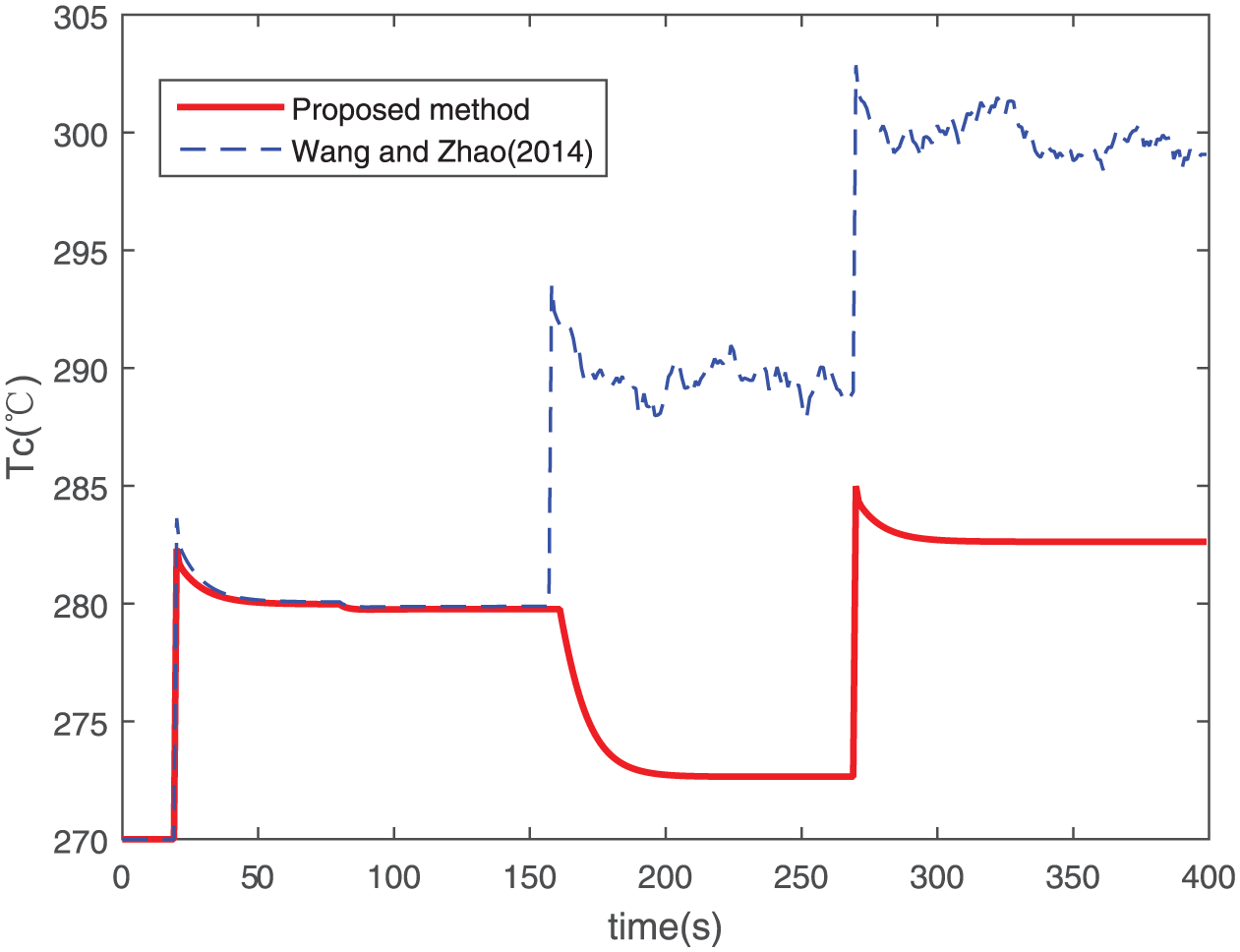
The control input of closed-loop system.
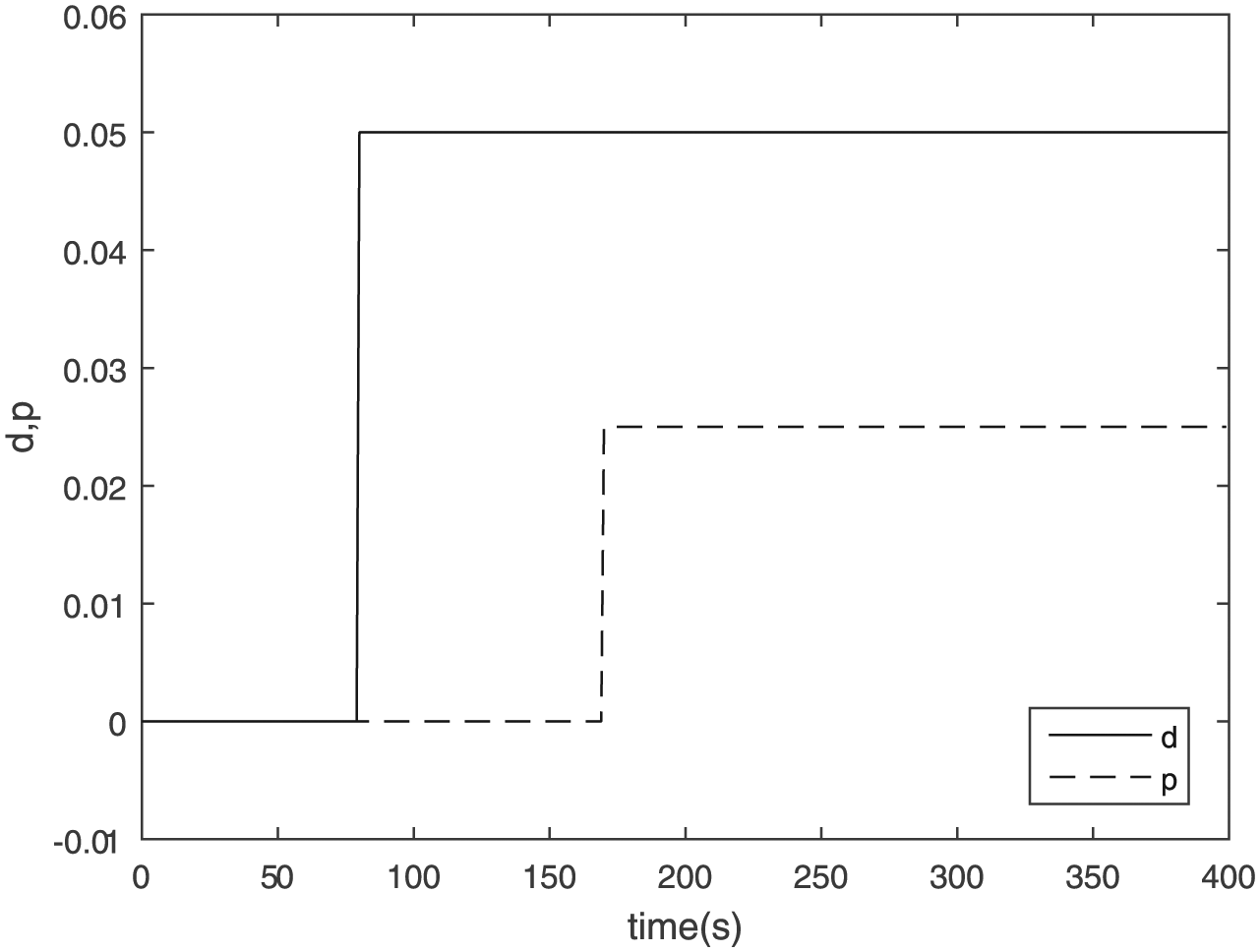
Input and output disturbances.
From Figure 8, we can see that the output of the closed-loop system can achieve smooth tracking set point by proposed method. When the system is subject to input disturbance (80s) and output disturbance (170s), respectively, the closed-loop system can actively reject these disturbances. Therefore, the offset-free control of system can be obtained by the proposed method. Although the method of Wang et al. 38 can also reject these disturbances, the system output appears to have steady-state error and the frequent fluctuations. In other words, the example shows that the method that consider only the input disturbance cannot deal with the control system with having input disturbances and output disturbances at the same time.
Example 2
pH neutralization process is very common in the industrial production, such as chemical industry, water treatment and power, which has the strong nonlinear, time varying, time delay and uncertainties. Therefore, pH neutralization process is considered as one of the most difficult control problems in control and engineering,50,51 as shown in Figure 11.
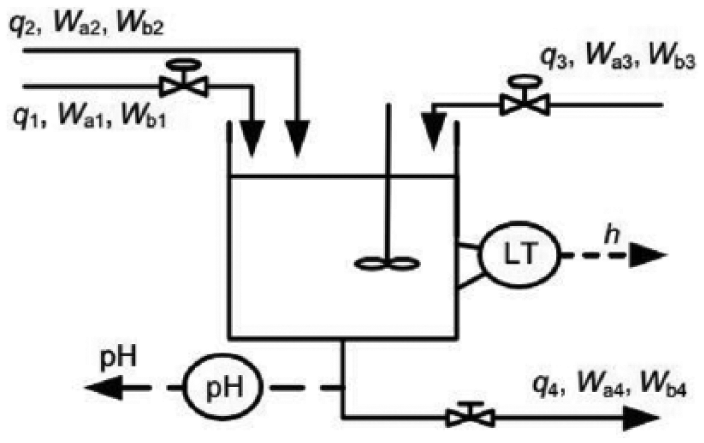
pH neutralization process.
The differential equations of pH neutralization process can be obtained 52
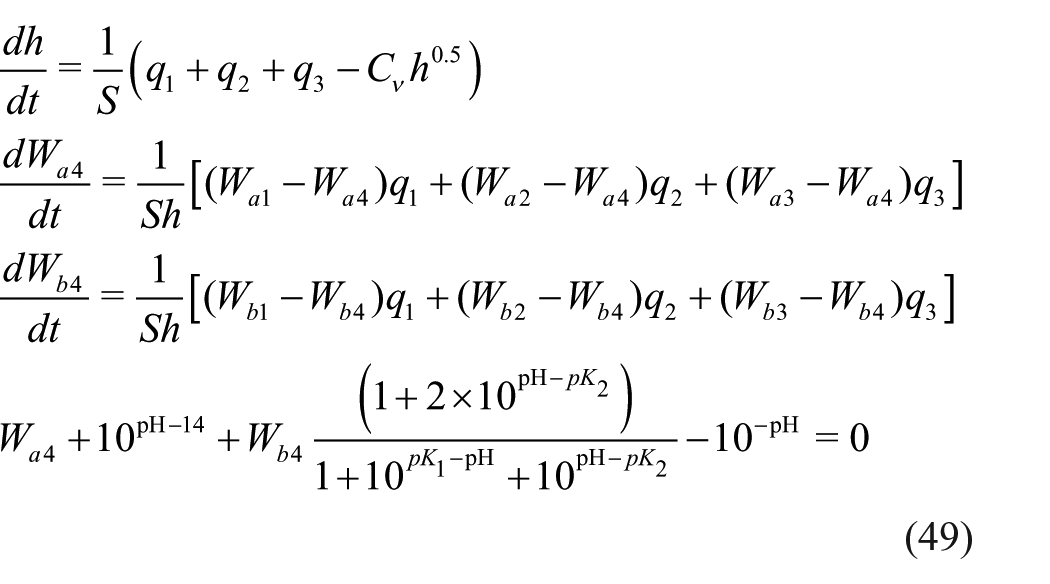
where
The nonlinear characteristics of the system can be shown in Figure 12. It can be seen that when the pH value is away from the neutral point (pH = 7), the sensitivity of pH value is very low for the flow rate of neutralization solution. However, when the pH value is close to the neutral point (pH = 7), the sensitivity of pH value is very high, so that the pH value can subject to strong change even if the flow rate of neutralization solution is slow. The identification result of pH neutralization process is shown in Figure 13. The error between Hammerstein–Wiener model output and system model output is shown in Figure 14.
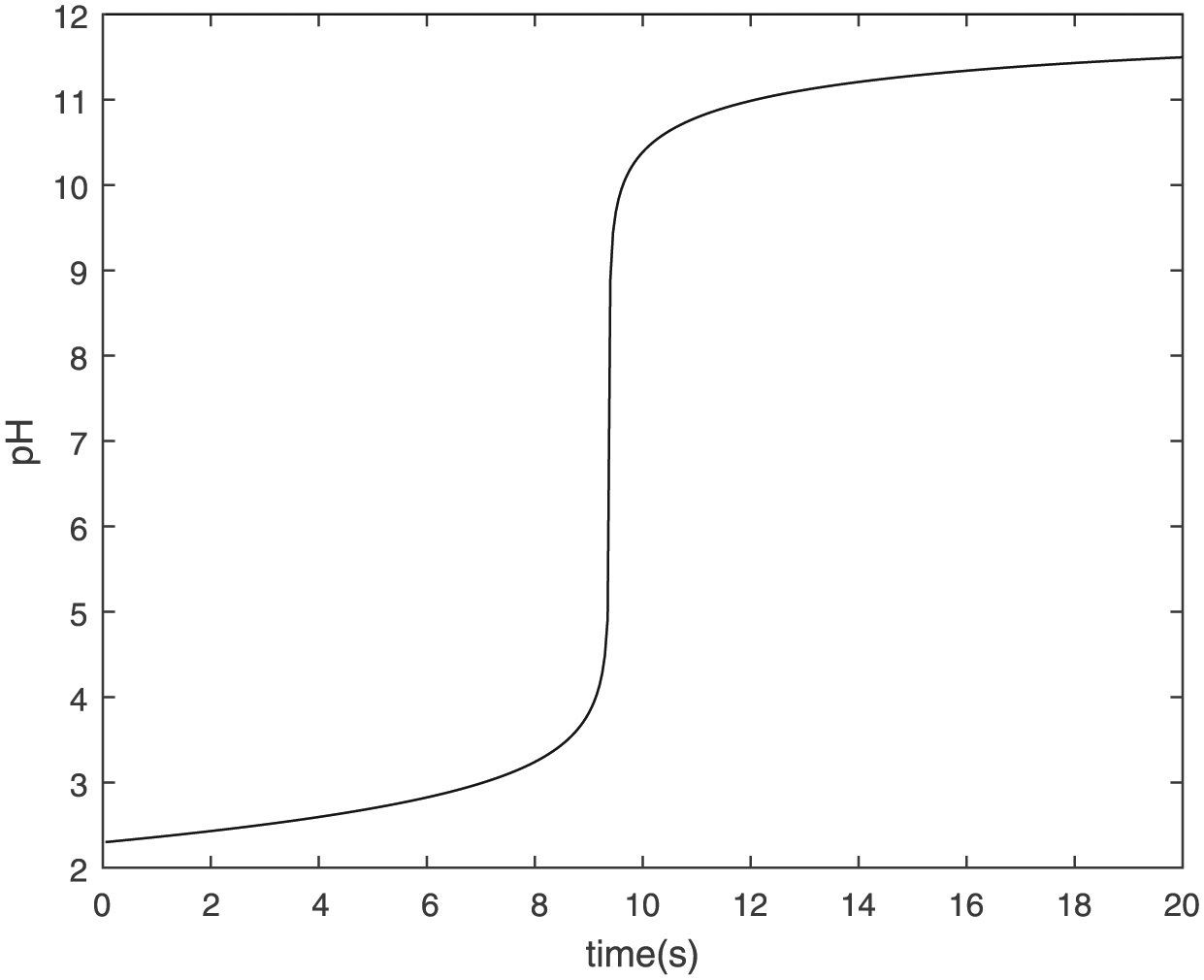
pH neutralization process titration curve.
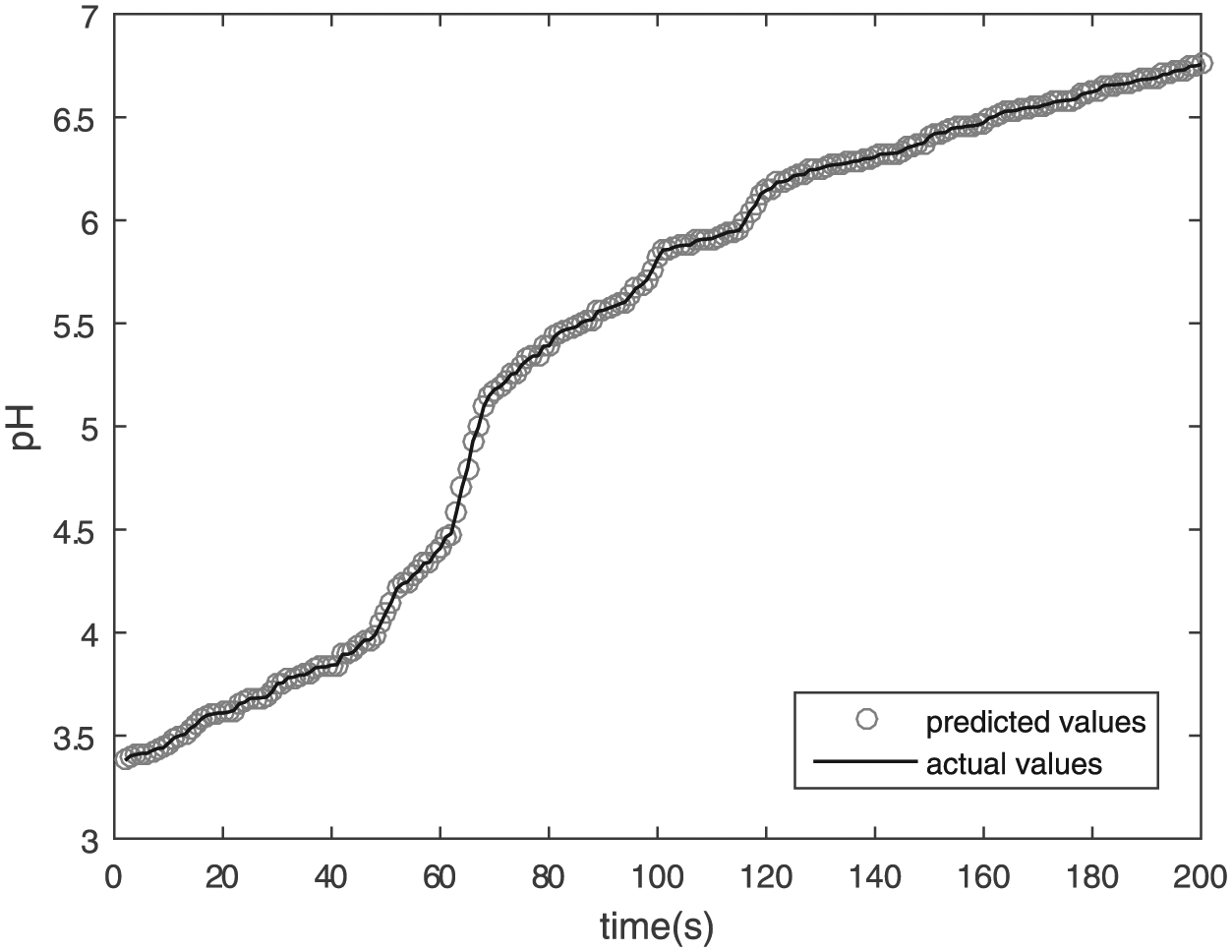
The identification results of pH neutralization process.
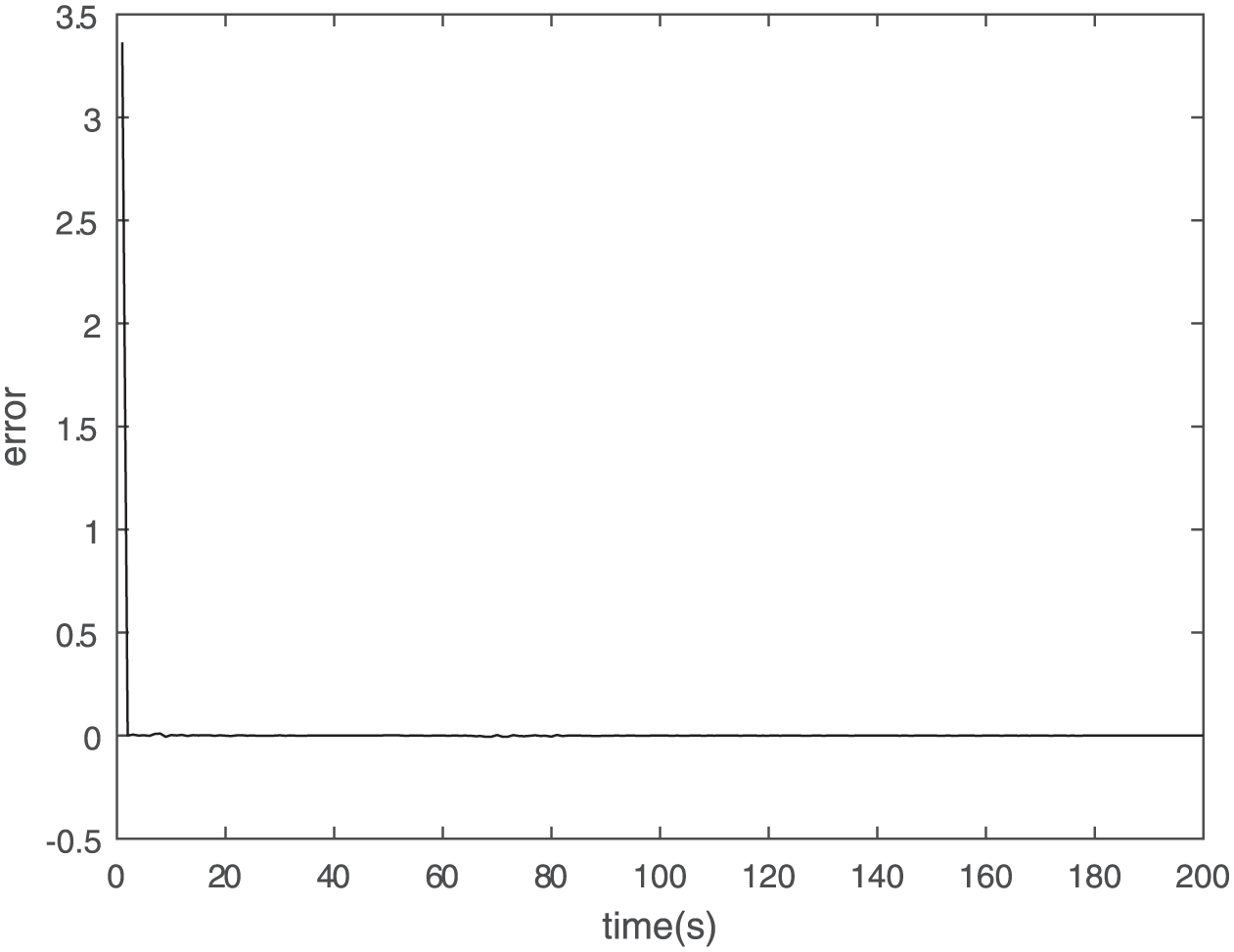
The error of between Hammerstein–Wiener model output and system model output.
Based on the deviation variables, the state vector

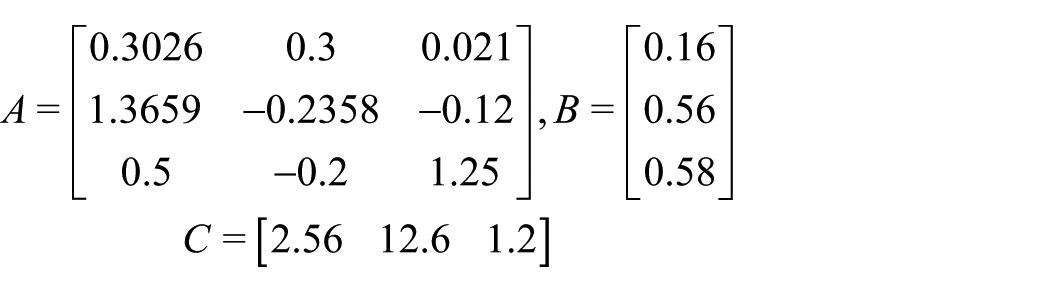
Similar to the CSTR example, the differential equations of pH neutralization process can be used to generate process data. Furthermore, by taking advantage of the system identification toolbox in MATLAB, the system matrices can be identified very easily in the nominal parameters. The system matrices can be obtained as follows
The disturbance models are still chosen as
The simulation results are shown in Figures 15–17. It is well known that the neutral point (pH = 7) is the control goal of pH neutralization process. When the closed-loop system is subject to the input disturbance (80s) and the output disturbance (300s) at the same time, the system has instantaneous fluctuation and it can immediately reach the neutral point. It can be illustrated that the proposed method possesses the strong robustness. However, the method of Wang et al. 38 cannot stabilize in the neutral point, and the system presents the frequent fluctuations near the neutral point. It can lead to the poor quality of pH neutralization process, so that the environment should be subject to very serious pollution. Therefore, it can be proved that the proposed method is very effective and practical.
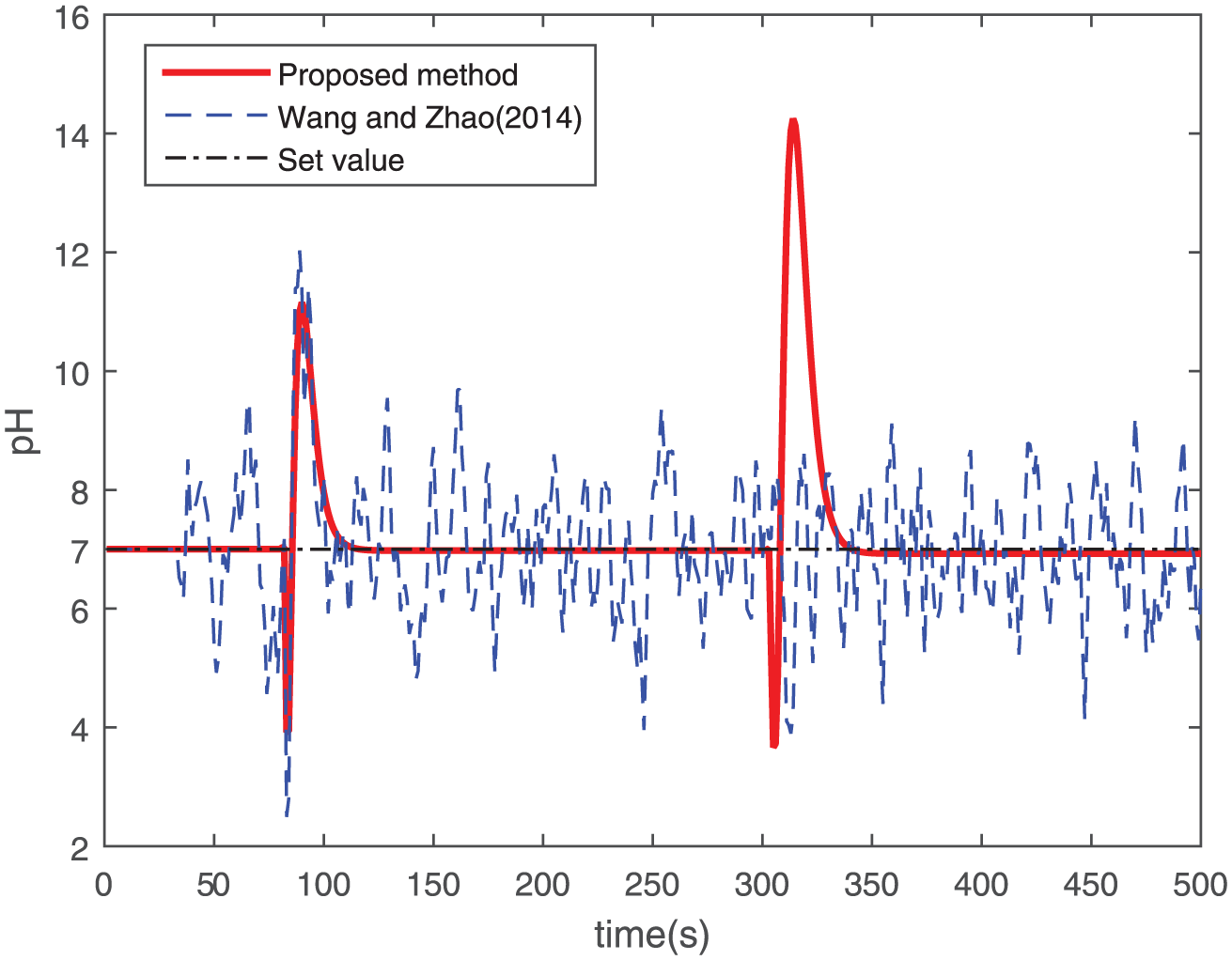
The output response of closed-loop system.
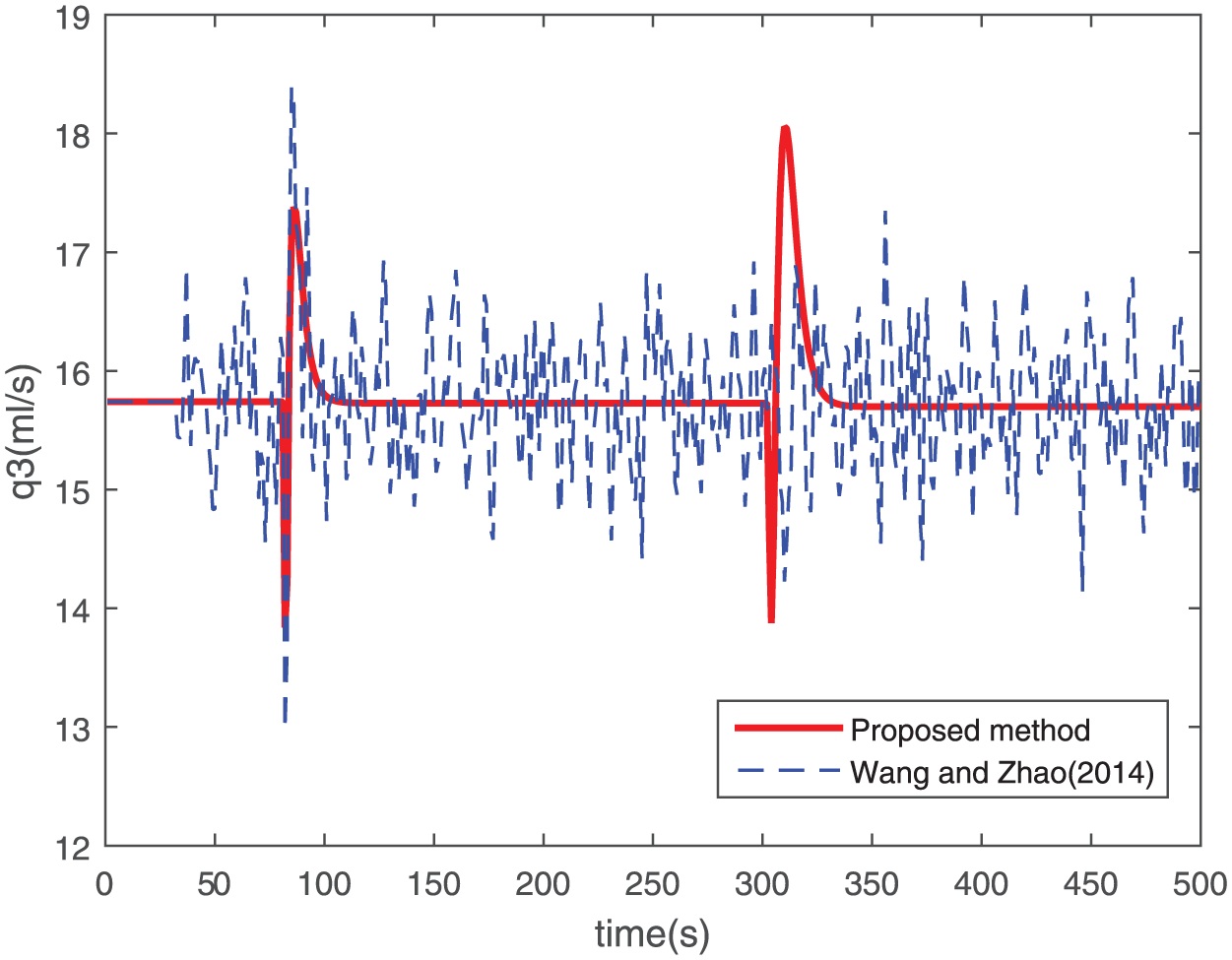
The control input of closed-loop system.
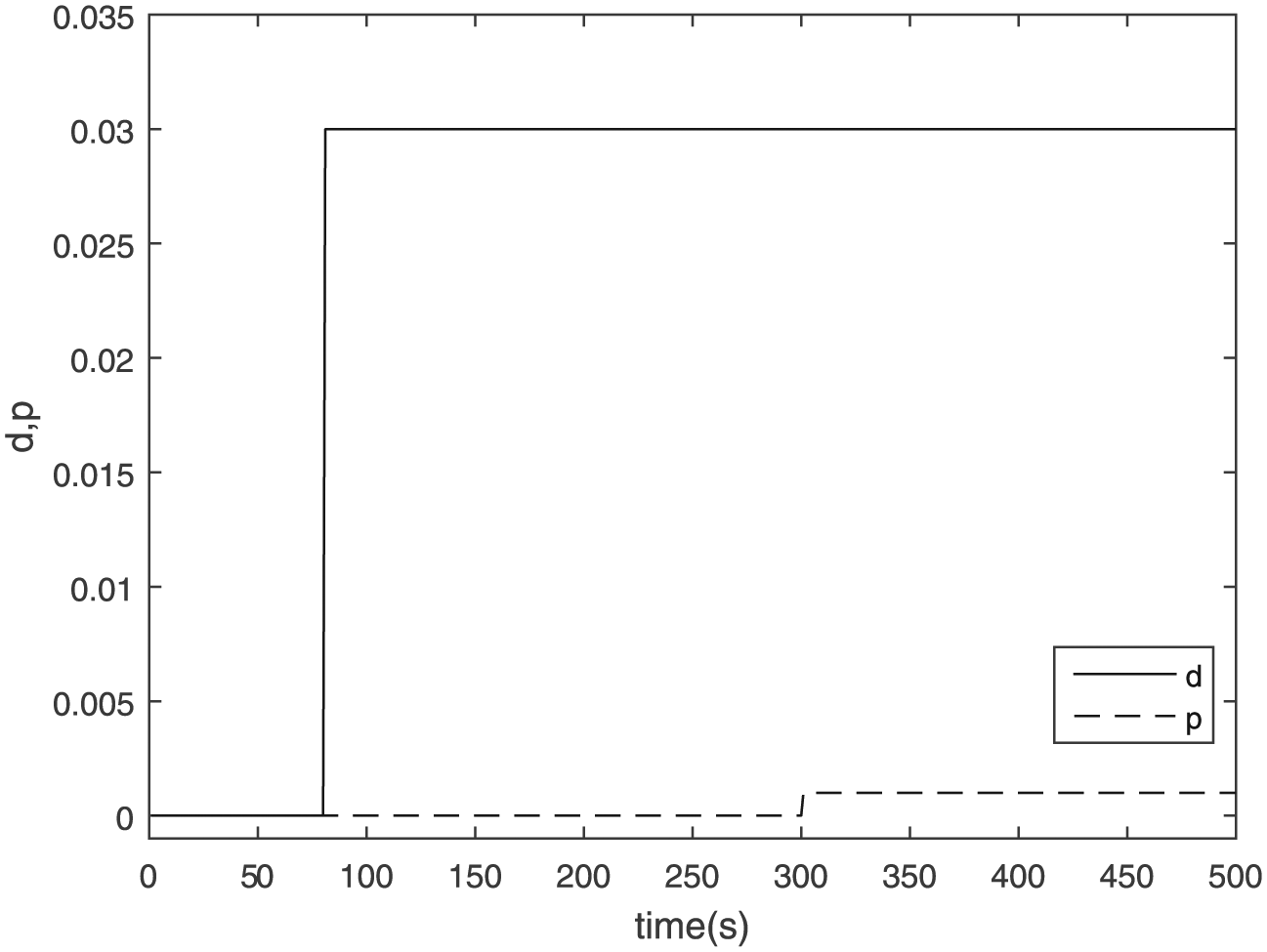
Input and output disturbances.
Conclusion
For the nonlinear systems that have simultaneously input and output disturbances, a double-layered NMPC based on the Hammerstein–Wiener model has been proposed. The proposed method takes advantage of the Hammerstein–Wiener model to describe the nonlinear systems, which has been transformed into combination of one linear part and two nonlinear parts, respectively. Disturbances and states have been estimated by applying to the Kalman filter. Moreover, the estimated disturbances were used for calculating steady-state targets in steady-state target calculation layer. Finally, the state feedback control law of MPC can be obtained in dynamic control layer. A simple proof for offset-free control is given in the proposed method. The proposed method has been applied to the industrial CSTR and pH neutralization process. The simulation results show that it has better disturbance rejection performance, and the controlled variables have been achieved the offset-free control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
This work was supported by the National Natural Science Foundation of China under Grants 61673199 and the Open Research Project of the State Key Laboratory of Industrial Control Technology, Zhejiang University, China (ICT1800400).