
Abstract
Energy hole problem is considered one of the most severe threats in wireless sensor networks. In this paper the idea of exploiting sink mobility for the purpose of culling the energy hole problem in hierarchical large-scale wireless sensor networks based on bees algorithm is presented. In the proposed scheme, a mobile sink equipped with a powerful transceiver and battery, traverses the entire field, and periodically gathers data from network cluster heads. The mobile sink follows an adaptive gathering strategy resilient to both connected and disconnected networks. The proposed gathering strategy geared to eliminate multihop relays required by all cluster heads to reach the mobile sink, balancing the traffic load across all network heads, meanwhile, reducing the loss that data may incur due to buffer overflow. Furthermore, enabling the mobile sink to navigate safely within cluttered and uncluttered fields augments the proposed gathering strategy. Extensive simulations are conducted in order to validate the effectiveness of the proposed strategy. The achieved results show an improvement in overall system performance compared to other mobility strategies.
Introduction
In recent years, there have been major advances in the development of low power micro-sensor nodes (sensor for short). The emergence of such sensors levitates sensor networking technology [1]. A typical high-level architecture of a wireless sensor network consists of a large number of sensors that are capable of probing the environment and reporting the collected data to a central gathering node, called the sink, using wireless channels [2]. There is an ever-widening range of attractive applications that sensor networks can be used for, e.g., object localization [3], multimedia broadcasting, and surveillance [4].
In wireless sensor networks, energy efficiency is considered as the most challenging issue. The sensor node usually behaves as both data originator and data router. The traffic follows a one to many pattern. Therefore, sensors in the proximity of a static sink act as traffic hot spots and have a significantly reduced lifetime than all other sensor nodes in the network, leading to what is known as an energy hole around the sink, which may result in a possible network disconnection and disruption of the data from reaching the sink [5, 6].
The sink mobility is considered as an efficient solution for data gathering problem. In such networks the sink changes its position from time to time, traverses the network, and collects sensed data from nearby nodes while moving. Therefore, employing a mobile device to collect data can reduce the effects of the hotspots problem, balancing energy consumption among sensor nodes, and thereby prolong the network lifetime to a great extent. The moving strategies for the mobile sink can be broadly classified as random, autonomous, and planned moving strategies [7–11]. In this article, the problem of planning an arbitrary moving trajectory for a mobile sink in hierarchical structure sensor networks is considered. The main aim of the proposed strategy is to achieve fair distribution for the load traffic among the network cluster heads. Accordingly, considerable network lifetime elongation compared with other mobility strategies, and sensor networks with a static sink can be achieved.
The rest of the paper is organized as follows: Section 2 discusses the most related work. Section 3 presents the proposed moving strategy. Section 4 shows the performance evaluation results. Finally section 5 concludes the paper.
Background
Various types of mobility strategies have been extensively studied in the literature. The authors in [12, 13] used radio-tagged zebras and whales as mobile nodes to collect sensed data in a wild environment. These animal-based nodes randomly wander in the sensing field and exchange sensed data only when they move close to each other. Thus, sensor nodes in such a network are not necessarily connected all the time. Moreover, the mobility of randomly moving animals is hard to predict and control; thus, the maximum packet delay cannot be guaranteed. The authors in [9, 10] have exploited sink controlled movement in order to improve data delivery performance. In their work, the path planning for a mobile sink was formulated as the mobile element scheduling (MES) problem based on the assumption that a mobile element visits each sensor node to collect data. Although the strategies in which a mobile device visits each sensor node or awake one-hop neighbor nodes to collect sensed data can save the most energy, but the main drawback of these approaches is the increased data collecting latency because the mobile sink has to traverse the transmission range of each sensor one by one to collect data. The authors in [11] have theoretically proved that, under the conditions of a short path routing and a round network region, moving along the network periphery is the optimum strategy for a mobile sink. Their analysis was based on an ideal load-balance short path routing protocol and the simulation was performed without consideration of Medium Access Control protocols (MAC) effects.
An attempt to determine specific sink movement for energy optimization is presented in [14]. The authors have employed multiple sink nodes that periodically change their locations, and present an ILP (Integer Linear Programming) model to obtain the optimal positions of these sinks. A linear programming solution to determine the movement of the sink and its sojourn time in different points of the network is given in [15]. Both the sensors and the sink are placed on a bi-dimensional grid. The sink moves along the grid, sojourns times in the specific grid points being calculated so as to maximize the network lifetime.
The authors in [16] have used multiple mobile elements called data MULEs for the purpose of data collection. Data MULEs traverses the sensing field along parallel straight lines and gather data from sensors. In order to reduce the latency, the packets that are sent by some sensors are allowed to be relayed by other sensors to reach the mobile observers. This scheme works well in a uniformly large-scale distributed sensor network. However, in practice, data MULEs may not be allowed to move along straight lines; for example, obstacles or boundaries may block the moving paths of the data MULEs.
Recently, much research has investigated the autonomous moving strategies for mobile sinks. The authors in [7] have argued that multi-hop communication results in fast depletion of the sensors neighboring the sink. Therefore, they have proposed an autonomous moving strategy for the mobile sink (HUMS) dedicated for periodic data gathering in sensor networks and in this approach, a mobile sink chooses different locations in each round according to the energy distribution in the network, where the mobile sink approaches the nodes with high residual energy to force them to forward data for other nodes and tries to avoid passing by the nodes with low energy. In each data gathering round, the sensors pack their residual energy information into data packets, and then report them to the mobile sink through multihopping communication. So the mobile sink can calculate a new position to move after to collect all the packets. However, the simulations performed by the authors revealed that HUMS failed to keep the energy balance between sensors in case of high node density.
The authors in [8] have presented an heuristic grid based algorithm for planning the moving path of a mobile sink (SenCar). The authors have assumed that the mobile sink initially follows a linear trajectory and collects information from the sensors. Then the sink uses this information to find the appropriate turning points to break its trajectory into separate segments that are close to the sensor nodes. In order to determine those turning points a divide and conquer approach is applied, in which each grid point in the sensing field is investigated to select those turning points that minimize the maximum traffic load that the sensors have to send out. However, in practice, examining the full sensing field grid points searching for the most effective turning points is an impractical and infeasible process, especially in large-scale networks. Moreover, since SenCar is a grid based approach, so it is nonapplicable to irregular network shapes. Furthermore, the proposed approach does not address avoiding dynamic obstacles that might encounter the mobile sink trajectory.
Apart from all these efforts, this paper presents the first work; to the best of the authors' knowledge that proposes a mobile data gathering scheme in hierarchical structure wireless sensor networks. This work is motivated for developing a mobility strategy able to achieve reduced transmission latency, as well as a fair load distribution among cluster head sensors in dense networks, without the need of a global image of energy status for all sensor nodes. Furthermore, the proposed work is aiming at developing a mobility strategy resilient to various network shapes and topologies, meanwhile, applicable for real-world applications where the sensing area could include different types of fixed and dynamic obstacles.
Proposed Moving Strategy
Since the work of this paper focuses on gathering data in large-scale networks, thereby as an attempt at minimizing the whole tour length, and elevating the overall network energy savings, the network is organized into several clusters without any centralized control. A cluster head controls each cluster. The cluster head manages the communication with the mobile sink on behalf of their members. Details about cluster head selection and cluster formation algorithms have been formulated in [17].
In this work, the problem of planning the moving path for a mobile sink is investigated. It is assumed that a mobile sink equipped with a powerful transceiver, GPS antenna, and battery with much longer lifetime than the sensor nodes periodically gathers the sensed data from the network's head. In addition, it is assumed also that the mobile sink explores the sensing field at the beginning of each round before the data gathering phase. Each mobile sink tour begins from a defined starting point, then the mobile sink moves along a well-planned moving path that traverses the whole network, directly gathers the sensed data from heads while moving, and finally returns to the starting point.
The key idea of the adopted moving strategy is to search within a space of possible configurations for a solution path, with the objective of balancing the trade off among energy efficiency, the total path length, obstacles avoidance, and buffer overflow deadlines. Such a path is accomplished by performing a search for a shortest path on an implicit set of pre-determined path points in state time space. Energy efficiency can be realized by searching for a path that traverses all network head nodes' transmission range. Moving along such a path will balance the traffic load among the heads, so the network lifetime can be prolonged. The adopted moving strategy can be roughly broken into two tasks. The first task concerns path-points identification, while the second task deals with path optimization.
Path-Points Identification Model
In order to accomplish the adopted moving strategy goal of producing a well-planned path, it is necessary to develop a path-point identification model. Such a model is created to indicate a series of interested points, through which the mobile sink is required to pass. The resultant path-points are those that to some extent present a discretized version of the full terrain, taking into account the overall goal of minimizing the maximum traffic load at each head.
Examining the full terrain searching for the most effective path-points is an impractical and infeasible process, especially in a large-scale terrain. So this work presents a simple and non-expensive path-point identification model. First, an agglomerative approach is used to organize all network heads into distinct groups. The agglomerative approach starts with each head forming a separate group. It successively merges the groups close to one another in terms of network hops; maximum two hops away, until the size of all groups are maximized. The size of any group is maximized if no more heads can be added to it. After the cluster formation phase, the path-points necessary to form the path can be simply set to the centroid points of these clusters. As the mobile sink will pass through the geometric centroid of the head groups, all network heads will be one hop away from the mobile sink path, which enables each head to directly send data to the mobile sink without relaying on other heads.
Figure 1 illustrates the proposed path-points identification model. Initially all nodes are put into a set H (H is the set of all heads). In order to construct cm which represents the set of heads in the mth group, one can start from an empty set cm. A node tj ∊ H is added into cm and removed from H. After that, all the neighbors (maximum two hops away) of tj are also added into cm and removed from H. Then the centroid of the mth group is calculated and added to the set of path-points. The algorithm is continued until H is empty.

Path-points identification algorithm.
After the path-points identification model returns a successful representation set for the terrain, all that remains is to find the best route that passes through those points. The proposed path planning approach phrases this issue as a constrained optimization problem by defining a cost function favoring a shorter path, and adding constraints to avoid heads' buffer overflow, and collision with obstacles. This paper uses the Bees algorithm [18] as a path optimization tool and an appropriate fitness function is developed to incorporate optimality criterions.
Bees Algorithm
Bees Algorithm is a population-based optimization algorithm that mimics the food foraging behavior of swarms of honey bees. In its basic version, the algorithm performs a kind of neighborhood search combined with a random search and can be used for both combinatorial optimization and functional optimization [18]. Figure 2 shows the applied pseudo code for the algorithm. The algorithm requires a number of parameters to be set, namely: number of scout bees (n), number of sites selected out of n visited sites (s_e), number of best sites out of s_e selected sites (e), number of bees recruited for best e sites (nep), number of bees recruited for the other selected (m-e), and selected sites (nsp).

Bees algorithm.
This section illustrates the methodology and formulation for Bees algorithm for obtaining the optimal sink path. This methodology incorporates problem representation, and the formulation of the fitness function that gives to each individual (i.e., possible configuration route) a measure of performance.
Problem Representation
The main parameters of the Bees algorithm that are used in this work are summarized in Table 1. The set of path-points are numbered i = 1. …N and each path-point has coordinates (xi, yi). Each bee in the population specifies a possible arrangement of path-points; such configuration is encoded as a vector comprising N path-points. This vector can be interpreted as the order in which the path-points are visited.
Parameters of the Bees Algorithm
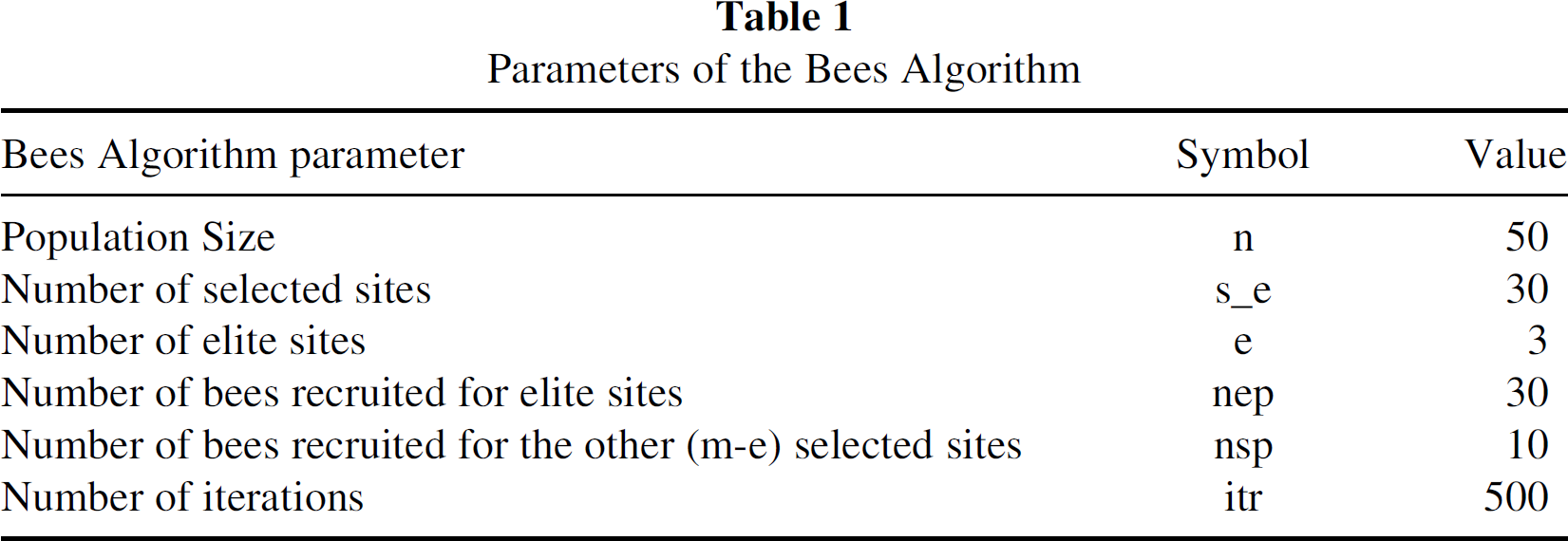
Parameters of the Bees Algorithm
For the case under investigation, the fitness function is a weighting function that measures the quality of a specific configuration. This function is optimized by the Bees algorithm. In the simplest form, the fitness function F can be considered as the total length of the mobile sink journey “(1)”.

The previous section has discussed the problem of planning a moving trajectory for a mobile sink in an open environment. However, the ability of the sink to adequately avoid obstacles while traversing the sensing field is an important feature, which in turn makes the proposed moving strategy feasible, and suitable for most real-time applications where the sensing areas may contain fixed obstacles such as rocks, lakes, and dynamic obstacles such as vehicles. Therefore the mobile sink must be able to move along the path-points and meanwhile avoid collision with obstacles that the sensing area may include.
In this work, it is assumed that complete information about the fixed obstacles' shapes and locations was obtained prior to an explanatory phase. Afterwards, the proposed moving strategy described in the pervious subsections has to be adjusted in order to incorporate obstacle avoidance. First, a group of obstacle-avoidance path-points were generated. This group includes a set of path-points placed around the obstacles corners. Thus, the entire set of path-points will hold up obstacle-avoidance path-points along with the global path-points determined by the basic path-points identification algorithm that was previously described in Fig. 1.
Next, the bees algorithm is applied to a fitness function that incorporates additional constraints of fixed obstacles avoidance. Therefore, the fitness function used to evaluate the mobile sink path can be described as:

Where s is the number of path segments that collide with obstacles, and P is the obstacle collision penalty. It can be seen that this function rewards paths of shorter length, while assigning a high penalty value to obstacle collisions. So minimizing this function will provide a path of the shortest length and free obstacle collisions. The value of P is determined heuristically, where increasing P decreases the possibility of accepting obstacles collisions.
Whereas this work is targeted to data gathering problem in a dynamic environment, so obstructing the mobile sink trajectory by a moving obstacle cannot be ignored. Therefore, enabling the mobile sink to plan alternative paths around dynamically detected moving obstacles should augment the proposed moving strategy. Moving obstacle detection is based on the on-board mobile sink ultrasound sensors readings. Once a dynamic obstacle is detected on the mobile sink path, the mobile sink begins to navigate around the detected obstacles, taking into account the presence of the fixed obstacles, and finally returns to its developed path.
Furthermore, in the proposed moving strategy, the length of each tour is also restricted by the head buffer overflow deadline, as the sensed data at each head must be gathered by the mobile sink before the buffer overflows. So in order to incorporate this constraint into the algorithm, the fitness function is modified to include another penalty Q which is thereby assigned to each tour length that leads to a head buffer overflow, therefore the fitness function can be described as follows:

Where f is the number of heads that miss their overflow deadline, Q is determined heuristically, such that paths that lead to buffer overflow of heads can be ignored.
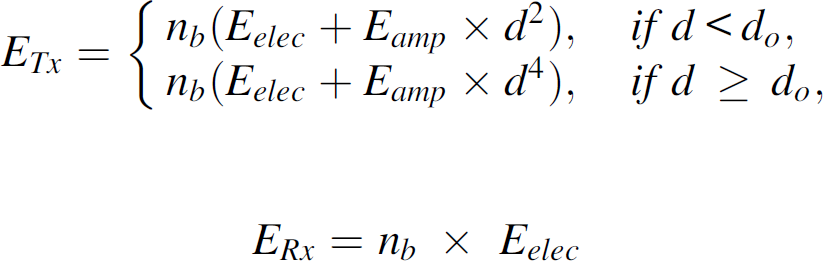
A complete environment comprises 2000 sensor nodes, and fixed and dynamic obstacles are developed to validate the proposed work. Sensor nodes are randomly dispersed into a field with dimensions 1000 meters ∗ 500 meters region. This work, adopted the same radio energy model described in [19]. In the adopted radio model, energy is expended to serve:
digital electronics, Eelec, (Eelec depends on factors such as digital coding, modulation, and filtering), and communication, Eamp. where Eamp varies according to the distance d between a sender and a receiver.
For a relatively short distance, the propagation loss is modeled as being inversely proportional to d2, whereas for a longer distance, the propagation loss is modeled as being inversely proportional to d4. Therefore, to transmit and receive nb bits in a distance d, the radio expenses the following energy, respectively:
This work assumes different heads overflow deadlines, so in order to simulate real scenarios; the overflow deadline assigned to each head is based on the number of nodes joining it whereas the overflow deadline of each head decreases as the number of joining members increases. Thus, in order to avoid data overflow, the sensed data at each head should be uploaded to the mobile sink before its buffer overflow deadline. The suitable simulation parameters are listed in Table 2.
Simulation parameters

The initial layout of the network heads and the generated path-points are shown in Fig. 4a, Fig.4b respectively. The mobile sink enters the field, starts its journey from a start point with coordinates (0 m, 250 m), collects the sensed data from all sensors, and returns back to the starting point. It was assumed that the information about the position of the sensors has been obtained during the explanatory phase. Based on that information, the mobile sink calculates its route through the proposed moving strategy. Figure 3c and d show the mobile sink trajectory in case of fixed heads' overflow deadlines, all heads have an equal overflow deadline, and in case of different heads' overflow deadlines.

(a) Initial layout of the network. (b) Set of path-points. (c) Sink moving path with fixed head overflow deadlines. (d) Sink moving path with different head overflow deadlines.
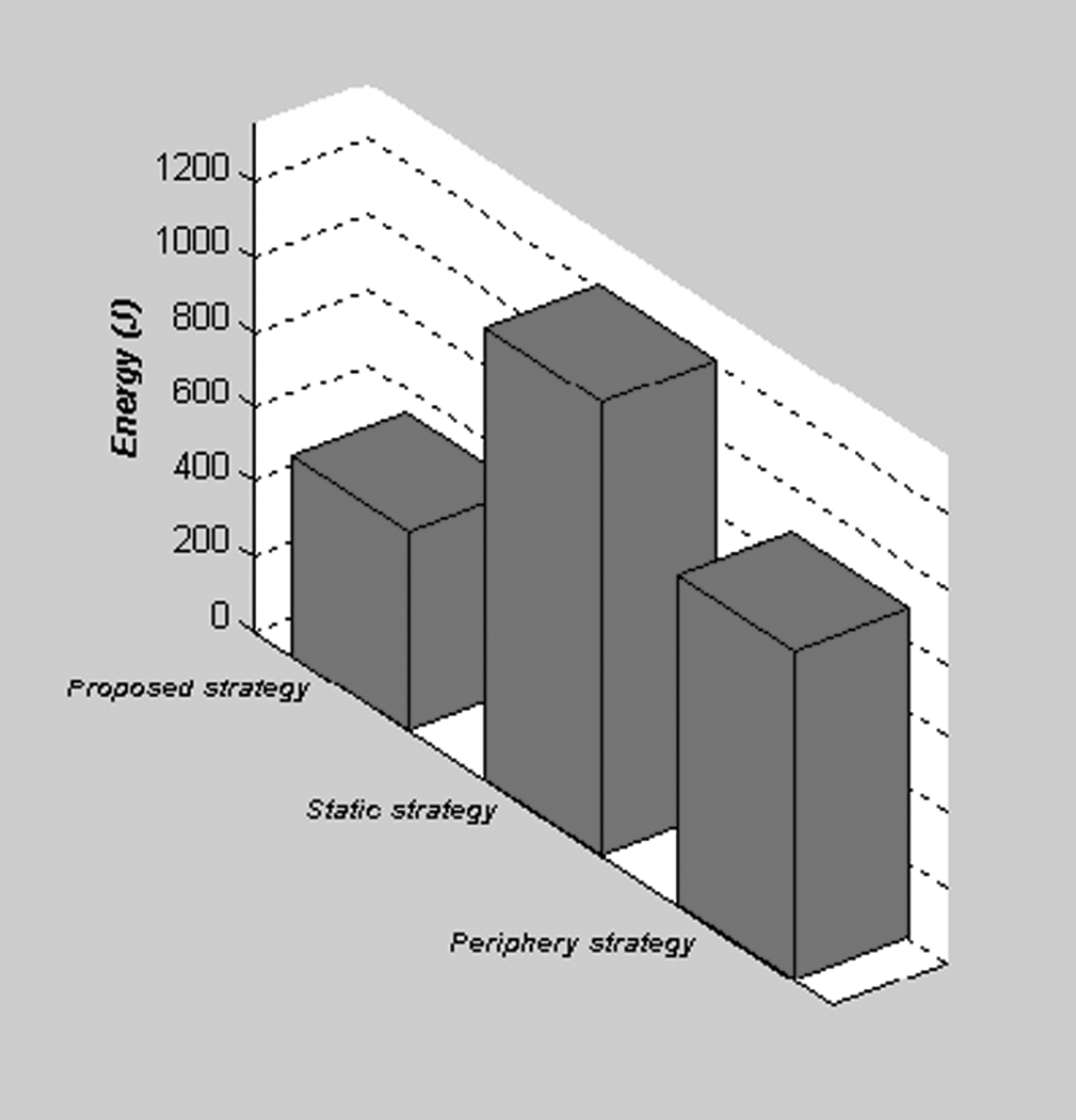
The average energy consumption in a round for all three strategies.
In order to evaluate the energy conservation capability of the proposed algorithm, the network lifetime performance of the proposed moving strategy is compared along with that of other two data-gathering schemes. The first scheme assumes a stationary sink node located at the network center and the second scheme proposes to move the sink along the periphery of the network [11]. Figure 4 presents the average energy consumption of the entire network per round, for the three different strategies. Ten different iterations were performed, and the average value is calculated. It can be seen that the adopted moving strategy consumes less energy. It is around 30% better than the periphery strategy, and 50% better in case of the conventional strategy with the static sink.
Figure 5a shows the network lifetimes of the three strategies with ten different node deployments, where the lifetime is the time until the first node dies (A node is considered “died” if it has lost 99 percent of its initial energy). The results indicate that the proposed moving strategy clearly improves the network lifetime over the other two strategies for all node deployment. This is because the mobile sink trajectory was planned such that all heads are at most one hop away from the moving path, so each node can now send its data directly to the sink without relaying on multi-hoping routing protocols. Similar results are obtained for the number of rounds until the death of fifty percent of the sensor nodes as shown in Fig. 5b.
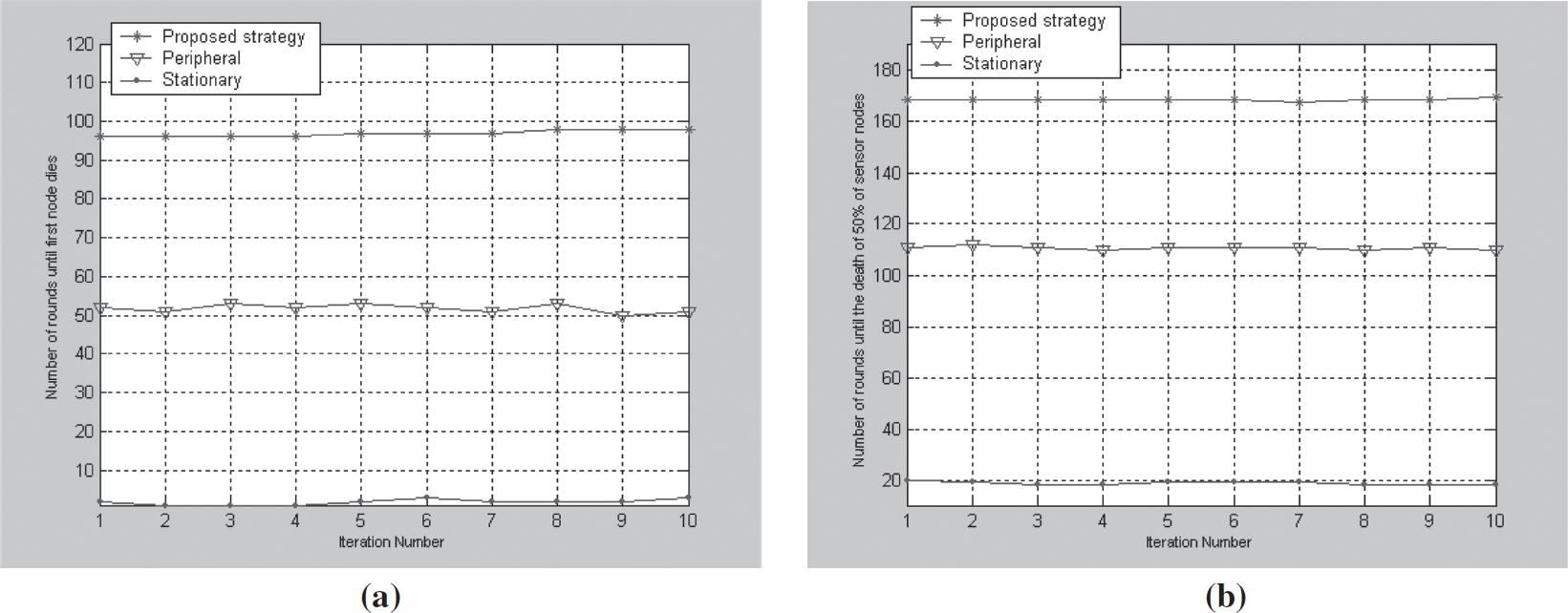
Performance of the proposed moving strategy. (a) Network lifetime (First node death). (b) Fifty percent of network lifetime.
Scalability of the proposed moving strategy is investigated. In this experiment the network lifetime of the three schemes were measured under different node densities and the results are shown in Fig. 6a. It can be seen that, as the node density increases, the network life time of both the stationary scheme, and periphery scheme decreases, that is because the sensor nodes near the sink have to forward more data in one gathering scheme. However, the lifetime of the proposed moving strategy shows better scalability. Similar results are obtained for the number of rounds until the death of fifty percent of the node as shown in Fig. 6b.

Network lifetime versus different node densities. (a) Network life time (first node death). (b) Fifty percent network lifetime.
In order to demonstrate the effectiveness of the proposed strategy, the network lifetime of the proposed strategy has been compared with that of HUMS [7], and SenCar [8]. Figure 7 illustrates a comparison between the relative network lifetime for the proposed strategy and the autonomous moving strategy (HUMS) proposed in [7], where the network lifetime for the static sink strategy is taken as a reference. In this experiment the same network dimension, and number of sensor nodes considered in [7] is used for comparison purposes. The achieved results show that the proposed moving strategy outperforms the autonomous moving strategy, ensuring better scalability and a longer network lifetime.

The relative network lifetime for the proposed moving strategy compared to autonomous moving strategy (HUMS)[7].
The relative network lifetime of the proposed strategy compared to SenCar [8] is plotted in Fig. 8. In this scenario, the network lifetime until the depletion of 100%, 90%, 50% of the sensors are calculated. Also, in this experiment, the network lifetime in case of static sink has been taken as a reference. Based on the figure, it can be seen that the proposed strategy can prolong the network lifetime significantly compared to SenCar, since each cluster head can upload data directly to SenCar without relays.

The relative network lifetime for the proposed moving strategy compared to SenCar strategy [8] in case of one hundred, ninety, fifty percent of network lifetime.
In real applications, network disconnection can be expected either due to unpredictable failures, or initial uneven sensor deployment where sensors are to be deployed so as to monitor separate regions in the sensing field. In a disconnected network, a node may not be able to communicate its data to a pre-selected node, which preclude data flow to a fixed base station. However, sink mobility may be the only feasible way for handling data gathering problem in such a type of network.
In this group of experiments, the adaptability of the proposed moving strategy to network disconnection is investigated. For this purpose, sensor nodes are organized into five partitions taking various shapes, including a circle, sector of a circle, T-shape, H-shape, Four-shape, and a triangle. Five hundred sensors are densely deployed in each partition. The mobile sink starts and ends its journey at the same point (0 m, 400 m). Its moving path was determined using the proposed moving strategy. Figure 9a shows the initial network layout, and Fig. 9b declares head positions along with the selected path-points, Fig. 9c illustrates the mobile sink trajectory. It can be seen that the mobile sink can visit the separate partitions one by one, collecting data from each partition. Thus adopting such moving strategy reveals its full advantage when applying on disconnected networks.

(a) Initial network layout. (b) Set of path-points. (c) Sink moving path through disconnected network.
In order to investigate the ability of the proposed moving strategy to avoid fixed obstacles, two thousand sensor nodes were deployed into two different environments. The first environment included four large obstacles each of size 200 × 200 m. Whereas, the second environment comprises three fixed obstacles different in shape and size, scattered in the field. Figure 10a, and Fig. 10c show the initial layout of the employed networks. Figure 10b, and Fig. 10d depict the achieved sink trajectory in the different environments, and it is clear from these figures that the mobile sink is capable of traversing the field, meanwhile avoid colliding with fixed obstacles. Finally, the same scenarios have been repeated with the existence of dynamic obstacles in the field. Figure 11 shows snapshots for the mobile sink moving trajectory. It is noted that the mobile sink succeeded in navigating around the obstacles that dynamically encounter its path.
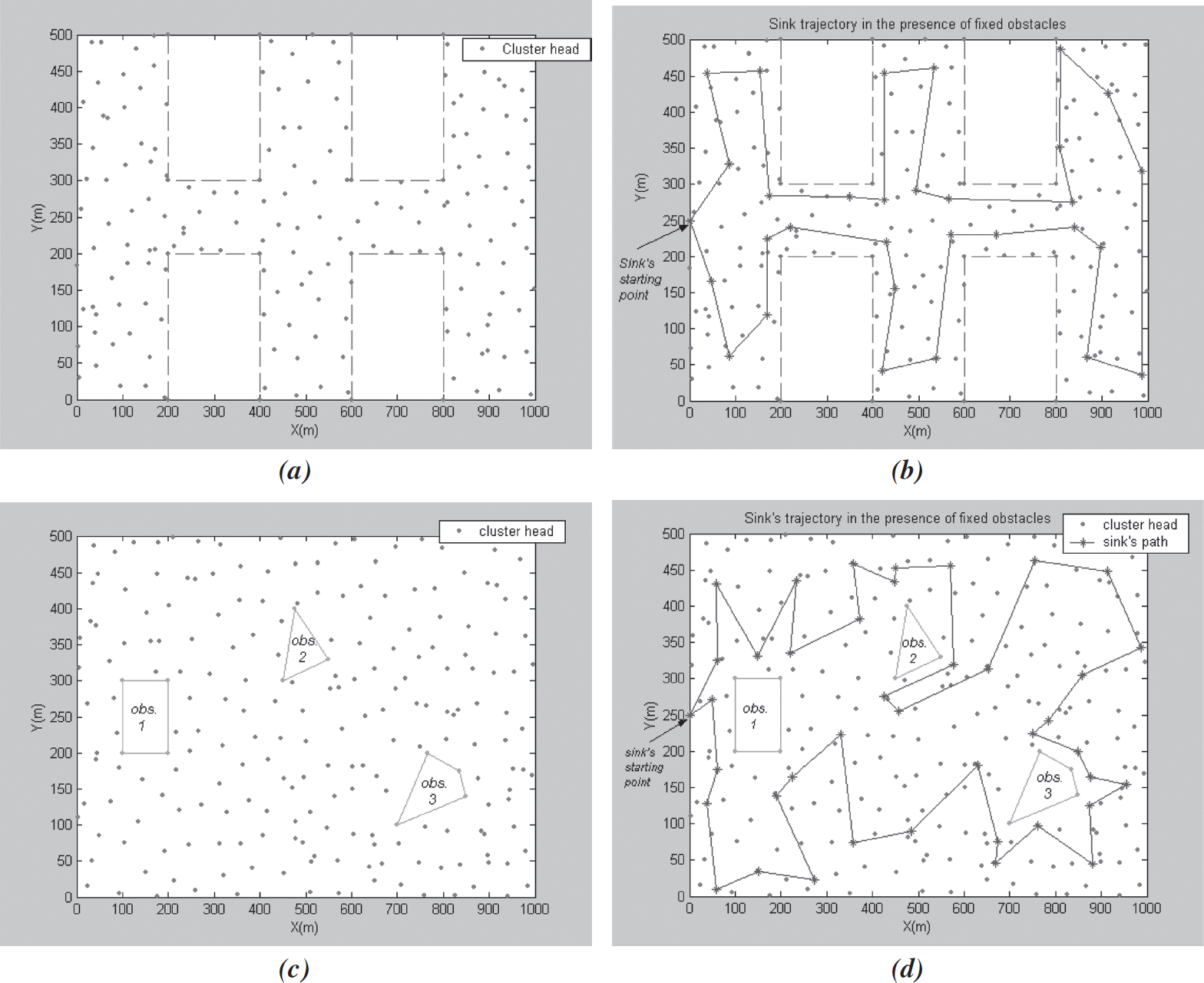
(a) Initial layout of the first environment. (b) Sink moving path across the first environment. (c) Initial layout of the second environment. (d) Sink moving path across the second environment.

Different snap shots for the mobile sink moving trajectory.
Enhancing energy-efficiency is primordial in a wireless sensor network. This paper proposed a well-planned adaptive moving strategy for a mobile sink in hierarchical, large-scale networks. The mobile sink starts a data gathering tour from a fixed starting point, traverses the network, collects data, and then returns to the starting point. Cluster heads upload sensed data to a mobile sink when the mobile sink traverses its transmission range. Packets from all cluster heads did not need any multi-hop relays to reach the sensor network. Thus, energy consumption incurred by multi-hop routing protocols is minimized. Furthermore, the proposed moving strategy is capable of avoiding fixed and dynamic obstacles that the sensing field may include. Simulation experiments in terms of network lifetime and scalability revealed that the proposed moving strategy outperforms other data gathering schemes, including static sink strategy, periphery strategy, SenCar, HUMS.
In our future work, the effect of using multiple sinks will be investigated. Adopting this approach helps in handling many algorithmic challenges for example, planning the moving path for every sink in the network, and the coordination between these multiple sinks.