
Abstract
Networked Embedded Systems have come to occupy an important role in emerging applications. Nodes in such a system are interconnected by a mesh topology. Despite the availability of multiple shortest paths between pairs of nodes, simulation results revealed that these paths cannot be effectively exploited by spreading the messages over the paths in a uniform method. We define the union of all the shortest paths between a pair of nodes as a contour. We present results that characterize the structure of contours when each node communicates directly with eight immediate neighbors. Heuristic rules that effectively disseminate messages over the available paths are presented. Simulation results demonstrate that the new method for dissemination ensures that nodes in a contour, which are at the same distance from the source, handle roughly the same number of messages. In the future, such techniques can be extended to general topologies.
Introduction
Networked embedded systems have emerged as a platform with tremendous capabilities and opportunities for future engineered systems. Such a platform comprises a large number of tiny, resource-constrained microcontroller nodes that have limited capabilities for computation and communication [1]. Sensor networks [2, 3] and networked sensor-actuator systems (NSAS) [4] are two examples of networked embedded systems. This paper presents a novel approach for dissemination in networked embedded systems called Contour Guided Dissemination (CGD) [5].
The problem of disseminating messages in networked embedded systems is particularly challenging because of the resource constraints at the node-level, limited bandwidth, high bit-error rates, and irregular propagation of the wireless links [6]. Because the wireless medium has a relatively low bandwidth, it is not desirable for every node to communicate with every other node directly. The immense scale makes it infeasible to associate a network address with each node in a networked embedded system. Propagation of messages between non-neighboring nodes without relying on unique network identifiers for each node, is referred to as dissemination in the sensor network literature [7]. This investigation considered the problem of disseminating the messages from a source node to a sink node when the nodes of a networked embedded system are located on a two-dimensional grid. A new method for dissemination that exploits the location of each node and multiple paths between nodes is presented.
Methods to disseminate messages from a source to one or more sink nodes have been addressed in the networking literature. Traditionally, routing protocols that are based on shortest-path algorithms such as the Bellman-Ford algorithm [8] and Dijkstra's algorithm [9] are the basis for these methods. For example, distance vector routing and link-state routing are two well-known protocols that are used in distributed systems [10, 11]. The distance vector routing protocol, which is based on the Bellman-Ford algorithm, requires each node to maintain a routing table. Each entry in the routing table of a node identifies the next node to which, a packet destined for a sink, must be sent. If d(i, snk) represents the distance from node n i to the sink node, and n j is a neighbor of n i , then the routing table of n i is updated for a neighbor n j whenever d(i, snk) > d(j, snk) + d(i,j), i.e., whenever a node discovers a new, shorter, route to the sink. In order to maintain accuracy of the routing tables, each node must notify its neighbors whenever its own routing table changes.
In addition to the message overheads, approaches based on the above algorithms are not suitable for sensor networks and networked embedded system. For example, when the topology is disrupted because of faults, it takes a long time for the routing tables in each node to converge to a stable state. The node resources are constrained and hence, it is not desirable to store and maintain routing tables. When there are multiple monitoring stations, every node must maintain a routing table for every monitoring station. Routing methods that are based on shortest path algorithms select a single path from a node to a sink. Because all the message propagates along this path, the nodes along this path must have more resources than other nodes in the networked embedded system.
In many engineered systems, the nodes are located at well-designed, fixed, locations. For example, in automotive assembly lines or warehouse conveyor systems, every module is located in a zone. Further, to ensure that the system is robust, multiple paths for communication between a pair of nodes are designed into the system. The motivating question for this investigation was whether all the available paths between a pair of nodes can be effectively used to disseminate messages.
Overview
Section 2 describes the monitoring problem, which is one application for Contour Guided Dissemination. Section 3 presents the Contour Guided Dissemination method. After defining the contour as the union of all shortest paths between a pair of nodes, it is shown that the relative locations of nodes are necessary and sufficient to allow each node to determine its position in a contour. Next, it is shown that to benefit from the multiple paths in a contour, it is not sufficient to uniformly spread the messages among the available paths; surprisingly, one path in the contour gets loaded with more messages than the other paths. A heuristic that efficiently spreads the messages over the available paths is presented. Section 4 presents the simulation results and Section 5 presents the conclusions.
Background
The problem of sending messages from a source over a multi-hop path is related to routing in wired and wireless networks [12] and to data dissemination in sensor networks [2] These approaches aim to move data from one or more sources to one or more sinks over a multi-hop network.
The two dominant methods used in wired networks are the distance vector scheme and the link state scheme that are based on the shortest path algorithms by Bellman [8] and Dijkstra [9], respectively, as discussed briefly in Section 1 Contour Guided Dissemination departs from the application-specific methods advocated in the sensor networks literature [7].
Networked embedded systems have unique characteristics such as scale, constrained resources, unreliable channel, and unpredictable failures. It is necessary to consider that the execution is periodic and may be based either on an event-triggered or time-triggered model. Nodes are not deployed in an ad-hoc manner and the geometric structure of the nodes can be exploited. The “query-response” model [13] is useful for networked embedded systems—however, the “queries” are not ad hoc; in contrast, they are highly structured; queries are issued infrequently in response to faults that occur in the environment.
Dissemination Protocols
Flooding and Gossiping [14] are two
data centric schemes for propagating data in multi-hop networks. These schemes are called
data-centric because the propagation is not based on the address, or any other identifier, of the
nodes involved in the propagation. In flooding, a node forwards its data to all its neighbors; note,
that in a wireless network, this effect can be achieved by a single broadcast. In Gossiping, a node
forwards data to a neighbor that is selected at random; once again, note that since broadcast is the
primary mode of communication in a wireless medium, the neighboring nodes that are
“not-selected” must drop the data. A protocol called SPIN [11] uses meta-data to reduce the data traffic in a sensor
network. In this approach, a node advertises the data it has and only sends the data only if a
neighbor requests the data. Reverse-path forwarding [7] is a general approach that is used in several dissemination protocols. In this approach,
a sink node (such as a Monitoring Station) generates a “query” that indicates an
interest in data items from one or more nodes. Such a query is forwarded along one or more paths
from the sink to all the nodes. The nodes forward data along these paths; since the data propagates
in a direction that is reverse of the query direction, this method is referred to as reverse-path
forwarding. Declarative routing protocol (DRP [15]), Directed Diffusion (DD [16]) and resilient multiple path Directed Diffusion [17] are examples that are based in reverse-path
forwarding. Cost field approach is another choice for routing. Every node maintains a scalar
that represents the cost of sending data back to the sink and the data is propagating along the cost
gradients. In [13] paper, the cost field
approach is divided into two categories: the receiver-decided protocols and the sender-appointed
protocols. Protocols based in cost-field require less memory space compared to reverse-path
forwarding since there is no need to maintain a routing table. Routing decisions are based in the
cost at each node. Since nodes are resource constrained in both communication and computation
capabilities, the cost field based approach is a good choice. GRAdient routing in Ad Hoc network (GRAd), simple cost field protocol [18], and GRA-dient Broadcast (GRAB [19]) are examples of a receiver-decided protocol. First, the
sink floods the network with the request message and sets up scalar values. For examples, if a node
receives from a node which has N hops to the sink, then it will set up its own
scalar as N + 1 hops to the sink. Energy Aware Routing(EAR [20]) and CGD discussed in this paper are
examples of sender-appointed protocols. The sender computes the cost of sending the data along the
multiple paths depending on the location of the sink, and then chooses the least cost route to send
its messages back to the sink. Virtual hierarchy approach: This approach achieves scalability by applying
multiple levels in the network. As shown in Fig.
1, the nodes form local clusters and a cluster head will be elected from the cluster. Nodes
in the cluster may rotate their roles as the cluster head in order to achieve the energy consumption
balance in the cluster. Since the radio transmission strength is adjustable, the cluster head node
can be set to a more powerful transmission range to reach the monitoring station. Low-energy
adaptive clustering hierarchy (LEACH [21]) and Adaptive Threshold sensitive Energy Efficient sensor Network (APTEEN [22]) are examples of such protocols. Geographical forwarding: By utilizing the GPS or the location on a grid, the
network uses location information to achieve a more efficient routing in the network. Geographic
adaptive fidelity (GAF [23]) sets up a
virtual grid depending on the GPS providing location and saves energy in the network by propagating
messages in different nodes in the same region. Geographical and Energy Aware Routing (GEAR [24]) reduces traffic load by first sending a
beacon in a sub region which the sink is interested in and then disseminate the query into this
region. Routing on a curve is an interesting generalization of source based routing and Cartesian routing
suitable for dense sensor networks [25].
In this approach, route paths are modeled as continuous functions. In contrast, the CGD method
proposed here is a sender-appointed routing scheme that effectively exploits all the shortest paths
between a pair of nodes. Real-time delivery and QoS: the protocols in the category consider the useful
life time of a packet and try to send the message back to the sink before the useful life time
expires. RAP [26] achieves this by
adjusting the packet priority in the queue, backoff and waiting parameters in the MAC layer. SPEED
[27] calculates the distance,
D, between the node with a message and the sink and dividing by the life time,
t. After getting the velocity In network data-processing: Instead of sending all the measured data back to the
sink, the local nodes will process the data and only sends out a summary to the sink. Sensor
Protocols for Information via Negotiation (SPIN [28]) and directed diffusion belong to this field. No matter in
what kind of network, reducing the redundant traffic in the network is always preferred.

Hierarchical approach for routing.
Table 1 shows a summary of the dissemination protocols discussed in this section. Add on features such as QoS, virtual hierarchy, etc., can be integrated into both reverse-path forwarding and cost-field approach.
Protocols Comparison

Coupled Conveyors is a method for building conveyor systems with an integrated networked embedded system that regulates its operations. The conveyor systems are assembled using three building blocks called Segment, Turnaround, and Crossover [4]. The following are two examples from [4].
Example 1: Inspection Station
Consider the instance of coupled conveyors shown in Fig. 2. This instance represents an application of coupled conveyors for material inspection and/or sorting. There are 18 Segments, 4 Turnarounds, and one Crossover in this instance. The module identities are shown next to each module. For example, port D of Turnaround T4 is embedded at grid location (1,1), and port A of Turnaround T2 is at grid location (5,3). Crossover C1 is at grid location (3,3); HCI devices H1, H2, and H3 are at grid locations (1,0), (3,4), and (5,0), respectively. All the other modules are embedded with appropriate directions as shown in Fig. 2 1 .
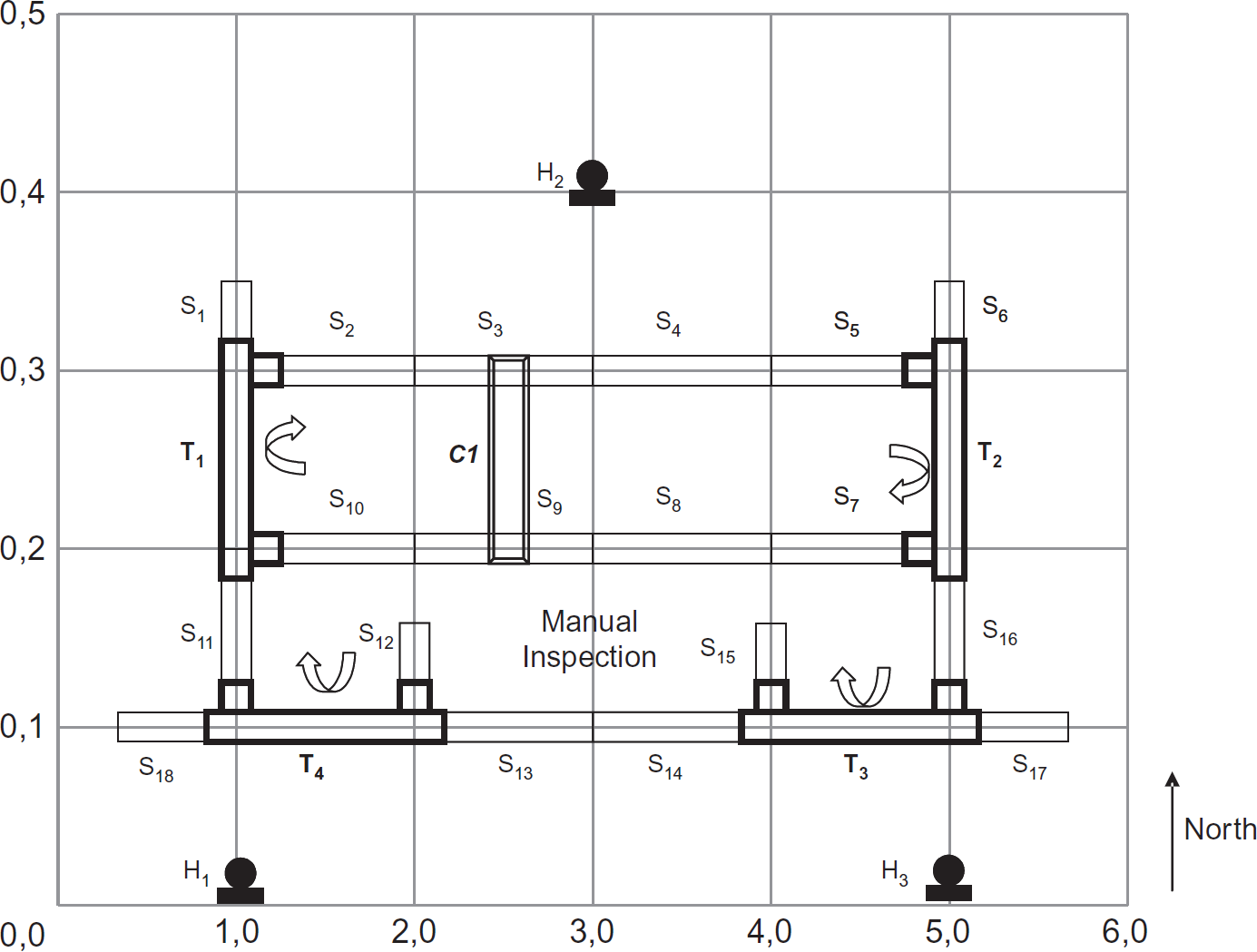
An inspection system.
Entities come in to the system via S6 (at port A of
T2) or S17 (port A of
T3). Entities leave the system via port D of
T4 or via S1 (at port D of
T1). Entities coming in via S6 may be moved
either along the path 

Entities may be deflected for re-inspection via port C of T3. Defective or oversized material that are likely to damage the inspection devices along the subpath S10, T1 may be diverted using C1. Entities coming into T3 can be moved along the subpath T3, S14, S15, or deflected at port C of T3 for manual inspection. Manually inspected entities may be reinserted into the system via port B of T4. The HCI devices are used to monitor the status of all modules and the operator panels can be used to issue commands such as start, stop, or force manual inspection for all entities over a duration of time. There are several other possibilities for moving entities in coupled conveyors that are not discussed in the examples in this paper.
Consider a typical engineered system that is depicted in Fig. 3. All the operations of this system are regulated by controllers and monitoring stations are directly connected to these controllers [29]. Periodically, the controllers send a block of words to the monitoring stations to update status. Systems software executing in the monitoring stations translate such a block of words to graphical widgets that are presented to users.
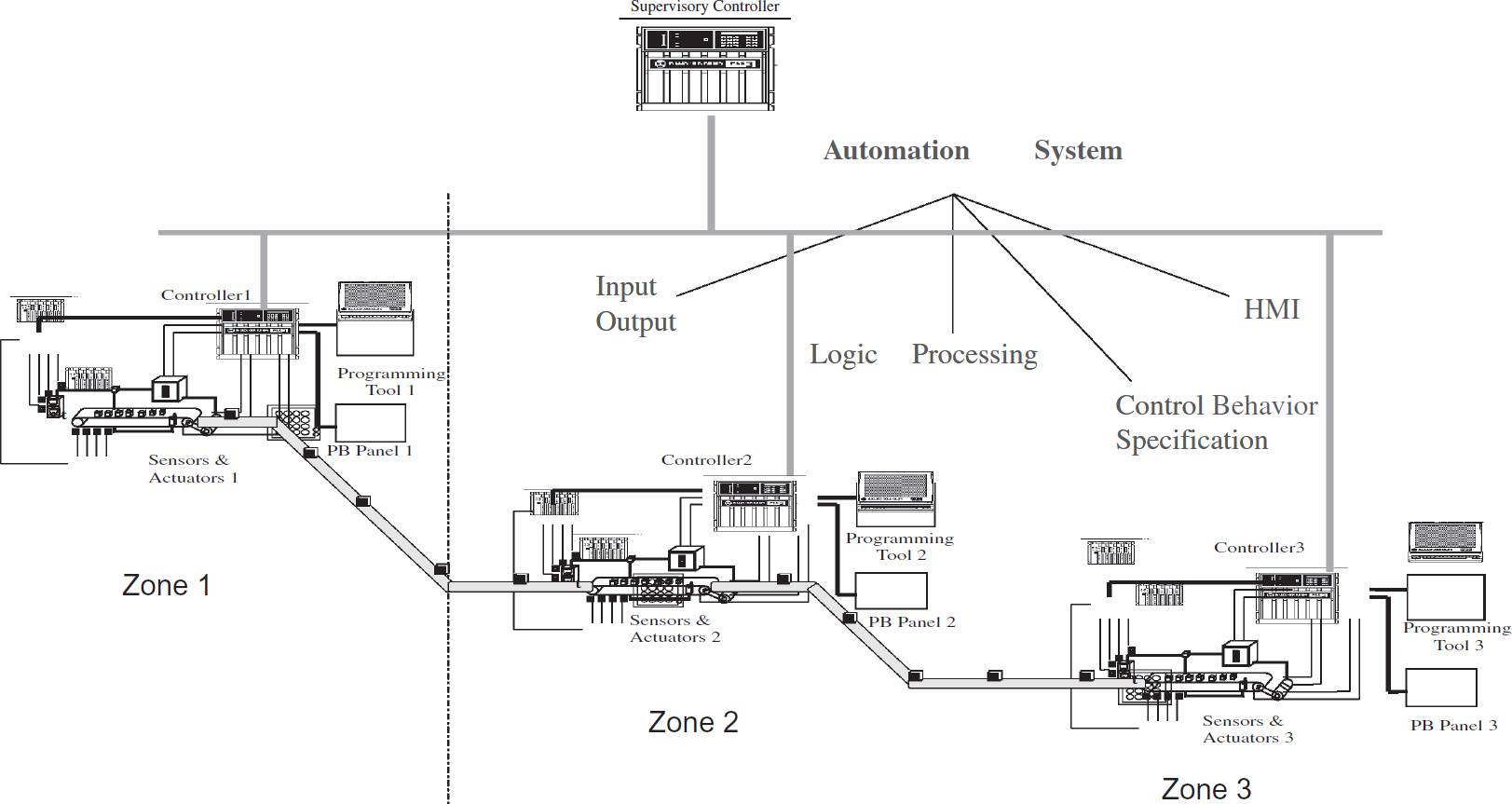
Monitoring in automation systems.
Consider an networked embedded system as shown in Fig. 4. In this system StatusMessages are delivered to
monitoring stations over multi-hop routes. Consider four nodes
n1,1, n1,2,
n1,3, and n1,4 and a monitoring station
M1. Only node n1,1 can communicate with
M1 in one hop. Let
Multi-hop Delivery Scenario 1


Monitoring an networked embedded system.
Generalizing the phenomenon in Table
2 and Fig. 4, if 
Networked embedded system nodes are not energy-constrained. However, these nodes are severely resource-constrained. These constraints are desirable to ensure easy scalability and maintenance. Consequently, large buffers cannot be maintained at each node. In addition, the node can only perform limited computation and communication. When the computation load is increased, the capacity for communication, sensing, and actuation is decreased. Communication rates can also not be increased because of the performance of the Media Access Control (MAC) protocol.
Carrier Sensing Multiple Access (CSMA) with Collision Avoidance is a basic MAC protocol that is used in sensor networks. Figure 5 shows the performance of CSMA as the number of nodes contending for the channel increases and as the rate at which the nodes initiate communication messages is increased. It can be noticed that when the rate increases, the number of messages received without collisions significantly drops. The number of messages received also decreases when the number of nodes contending for the channel increases. To address these challenges, the approach used here aimed to exploit multiple paths that are available between a pair of nodes.
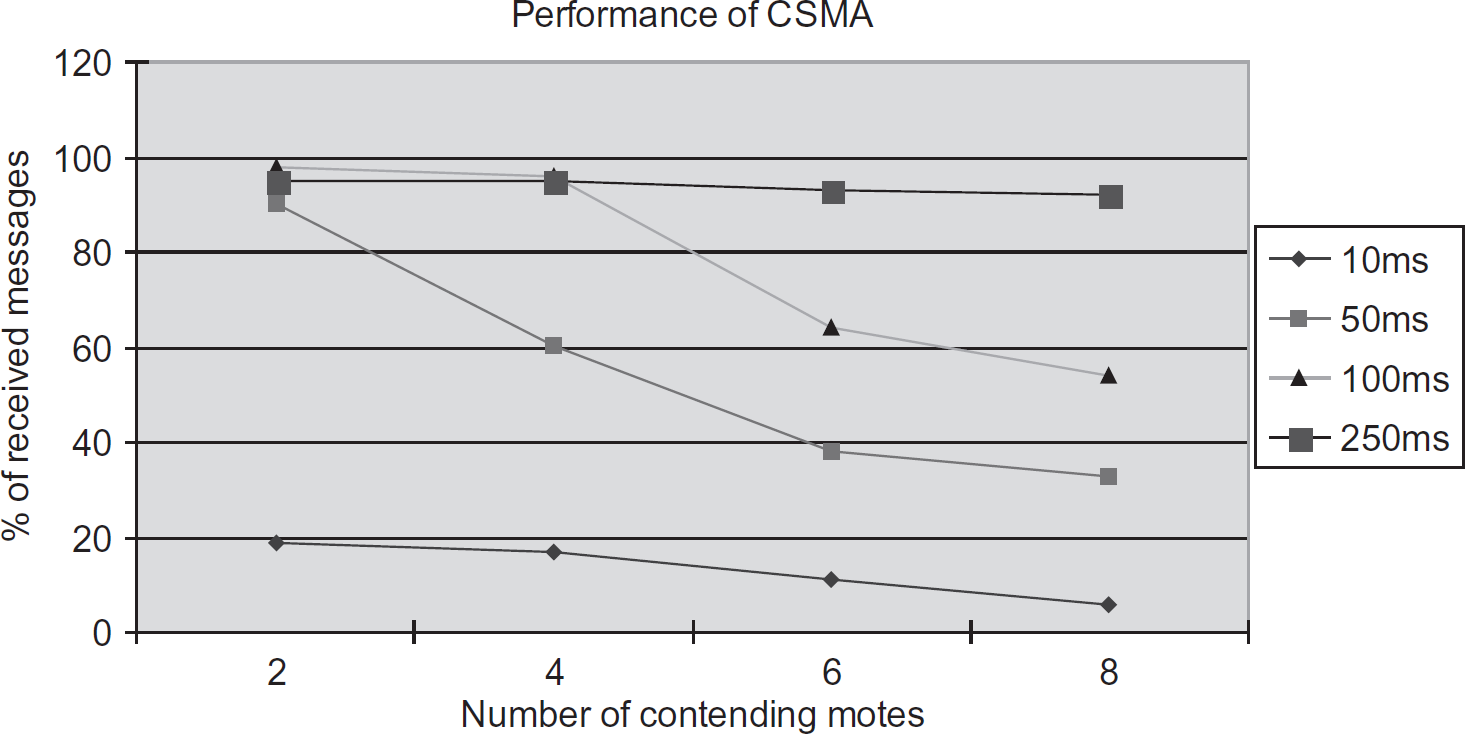
Performance of CSMA.
A contour is the union of all the shortest paths between a pair of nodes. Every node is either in the contour or not; only nodes in the contour participate in the dissemination. Section 3.1 develops results that are sufficient to allow each node to compute its own position on a contour using local computations. It was intuitively appealing to utilize the multiple paths in a contour by uniformly spreading the messages over the available paths. It is shown that this intuitive idea results in one path being loaded, despite the availability of multiple paths. A heuristic spreading method that effectively uses the multiple paths is presented.
Contour of Shortest Paths
Consider an networked embedded system in which each node n i,j is located at on a grid. Each node can communicate directly with its eight immediate neighbors 2 as shown in Fig. 6. Because such communication is possible, there exist multiple shortest paths between any a pair of nodes, n i,j and n q,r , in the grid.

Eight neighbors of a node n i,j
Definition 1
The contour of the shortest paths between ni,j and nq,r (“contour of ni,j and nq,r” for short) is the union of all the shortest paths between ni,j and nq,r. Each path in the contour is different from every other path by at least one edge.
Definition 2
Given a pair of nodes ni,j and nq,r,

When the context is clear, xdiff, ydiff, xydiff and κ are used without explicitly specifying the nodes.
Observation 1
The length of the shortest path between nodes ni,j and nq,r is max(xdiff, ydiff).
Proof
Follows from the structure of the grid.
Lemma 1
Let y diff = 0. Given a pair of nodes ni,j and nq,r, the contour of ni,j and nq,j is a rectangle, with corner nodes ni,j, ni + κ, j − κ, nq− κ, j + κ, and nq,j, if and only if xdiff is even.
Proof
First, given y diff = 0 and x diff is even, it is shown that the four corner nodes of the contour are ni,j, ni+κ,j-κ, nq-κ,j+κ, and n q,j . Consider the shortest paths shown in Fig. 7. The obvious shortest path between the nodes n i,j and n q,j is along the path <n i,j , ni+1,j, …, nq-1,j, n q,j=r >. Since x diff is even, there are an odd number of nodes in the path. Let us call this path a Layer 0 path for convenience. As shown in Fig. 7, there are additional shortest paths between the nodes n i,j and n q,r Any subpath < … n s,t ,ns+1,t,ns+2,t, … > can be replaced by a path < … n s,t ,ns+1,t+1,ns+2,t, … > or < … n s,t ,ns+1,t-1,ns+2,t, … > without increasing the length of the shortest path. However, in Layer 1, the node ni,j+1 cannot be on any shortest path because any path between n i,j and n q,j that passes through ni,j+1 must be of length ≥ x diff + 1. Similarly, node nq,j+1 (in Layer 1) cannot be on any shortest path.

Layered paths when x diff is even.
It may be noticed that in each layer, p, 1 ≤ p ≤ κ, the number of nodes that can appear on any shortest path between n i,j and n q,j is decreased by 2 × p. Since Layer 0 has an odd number of nodes, Layer κ must have a single node, i.e., n i+κ,j+κ which is one corner node. Using similar arguments, it is noticed that there are additional shortest paths between n i,j and n q,j that go through nodes in Layers −1, −2, …, -κ. Once again, Layer -κ must have a single node, i.e., n i+κ,j-κ . Since x diff is even and y diff = 0, q − κ = i + κ, the four corner nodes of the rectangle are specified in the Lemma.
Next, given y diff = 0 and a contour with four corner nodes ni,j, ni+κ,j-κ, nq − κ,j+κ and n q,j , it is shown that x diff is even.
Consider the path from n i,j to n i+κ,j+κ . The length of this path is the same as the length of the path from n i,j to n i+κj because of the structure of the grid. It follows from the construction that x diff is 2 × κ and hence must be even. □
Lemma 2
Let x diff = 0. Given a pair of nodes ni,j and nq,r, the contour of ni,j and nq,j is a rectangle, with corner nodes ni,j, ni-κ,j+κ, ni+κ j+κ and ni,r, if and only if ydiff is even.
Proof
Similar to the proof of Lemma 1, except that the Layer 0 path will be along the y axis. □
Lemma 3
Let y diff = 0. Given a pair of nodes n i,j and n q,r , the contour of n i,j and n q,j is a hexagon, with corner nodes n i,j , ni+κ,j-κ, ni+κ+1,j-κ, nq-κ,j+κ, nq-κ−1,j+κ and n q,j , if and only if x diff is odd and x diff ≥ 3.
Proof
Consider the shortest paths between node n i,j , and n q,j , when y diff = 0 and x diff is odd, as shown in Fig. 8. The arguments are similar to the proof of Lemma 1. Because x diff is odd, there are an even number of nodes along the path involving only the nodes in Layer 0. As in the case of Lemma 1, the number of nodes that can be on any shortest path in Layer p, 1 ≤ p ≤ κ, decreases by 2 × p compared to the number of nodes in Layer 0. However, since the Layer 0 path has an even number of nodes, Layer κ must have two nodes, i.e., n i+κ,j+κ and n i+κ+1,j+κ . Similarly, Layer -κ will have the two nodes n i+κ,j-κ and ni+κ+1,j-κ.

Layered paths when x diff is odd.
Given y diff = 0 and a contour with six corner nodes n i,j , ni+κ,j-κ, ni+κ+1,j-κ, nq-κ,j+κ, nq-κ−1,j+κ and n q,j , Consider the path from n i,j to ni+κ,j+κ. The length of this path is the same as the length of the path from n i,j to ni,j+κ and the path from n q,j to nq-κ,j+κ is the same as the length of the path from n q,j to nq-κ,j. Because of the structure of the grid, x diff is 2 × κ + 1 and hence must be odd. □
Lemma 4
Let x diff = 0. Given a pair of nodes n i,j and n q,r , the contour of n i,j and n i,r is a hexagon, with corner nodes n i,j , ni-κ,j+κ, ni-κ,j+κ+1, ni + κ,r-κ, ni+κ,r-κ−1 and n i,r , if and only if x diff is odd and y diff ≥ 3.
Proof
Similar to the proof of Lemma 3. □
Theorem 1
The contour of ni,j and nq,r is a rectangle bounded by the nodes ni,j, ni+κ,j-κ, nq-κ,r+κ and nq,r if and only if xydiff is even.
Proof
Given that xy diff is even, either both x diff and y diff are even or both x diff and y diff are odd. Without loss of generality, assume that x diff > y diff . Two such nodes are shown in Fig. 9.

Contour when xy diff is even.
Consider the case when both x diff and y diff are odd. Consider the shortest path from node n q-r+j,j to n q,r . Clearly, no shortest path between these nodes can pass through the node n q,j . In fact, the shortest path is via the node nq-r+j+1,j+1, nq-r+j+2,j+2 to n q,r . Because y diff is odd, the path from n i,j to n q-r+j,j must be even and the conditions of Lemma 1 apply. Consequently, the contour of n i,j and n q-r+j,j is a rectangle. Since the length of the path from n i,j to n q-r+j,j is xy diff , by definition, the corner nodes of this rectangle are n i,j , ni+κ,j-κ, ni+κ,j+κ and n q-r+j,j . Hence, nodes n i,j and n i+κ,j-κ are at least two corner nodes of the rectangle.
Next, consider the path n i,j , ni+1,j+1…n i+r-j,r . Because the nodes can communicate across the diagonal links, this path must be on a shortest path from n i,j to n q,r . Further, since y diff is odd, the path from n i+r-j,r to n q,r via the nodes ni+r-j+1,r, ni+r-j+2,r to nq-1,r, n q,r must be even. Hence, by Lemma 1, the contour of n i+r,q+r and n q,r is a rectangle. Since the length of the path from n i+r-j,r to n q,r is by definition xy diff , the remaining two corner nodes of this contour are n i+r-j+κ,r+κ and n i+r-j+κ,r-κ . Since xy diff to the source and the sink nodes are both 0, they are corner nodes.
The arguments when xy diff is even and both x diff and y diff are even are similar to the above arguments. Since n i+r-j+κ,r+κ is the same as n q-κ,r+κ , when xy diff is even, the contour of n i,j and n q,r is a rectangle that is bound by the four nodes ni,j, ni+κ,j-κ, nq-κ,r+κ and n q,r .
Next, given a contour of n i,j and n q,r with four corner nodes as ni,j, ni+κ,j-κ, nq-κ,r+κ and n q,r , it is shown that xy diff of n i,j and n q,r must be even.
xy
diff
(ni,j,
nq,r) is even only when x
diff
(ni,j, nq,r) and
y
diff
(ni,j,
nq,r) are both even or are both odd. By definition,
Observation 2
When xy diff = 0, the four nodes that bound the rectangle in Theorem 1 are n i,j , ni+0,j−0, nq−0,r+0 and q, r; i.e., the shortest path between nodes n i,j and n q,r is unique and the contour of n i,j and n q,r contains only this path.
Theorem 2
The contour of ni,j and nq,r is a hexagon bounded by the nodess ni,j, ni+k,j-k, ni+k+1,j-k, nq-k,r+k, nq-k-1,r+k and (q, r) if and only if xydiff is odd and xydiff ≥ 3.
Proof
The proof is very similar to the proof of Theorem 1. □
Observation 3
When xy diff = 1, κ = 0 and hence, the six corner nodes that bound the hexagon in Theorem 2 are n i,j , ni+0,j−0, ni+0+1,j−0, n q−0, r+0 , nq−0−1, r+0 and n q,r ; i.e., the corner nodes of the contour are n i,j , n i+1,j , n q,r and n q−1,r .
Observation 4
Every node in the contour of ni,j and nq,r will have one two or three shortest paths to nq,r.
Proof
Proof is immediate from the construction of the contour.
The results in this section are used by networked embedded system nodes to compute the contour.
Assume that a node (source) is sending messages to a sink such as a monitoring station. Every message contains the location of the source and the sink 3 .
Figure 10 depicts a scenario when the source is sending 99 messages to the sink. Every node in the contour uniformly spreads all the messages it receives over all the shortest paths from itself to the sink. Because xydiff is even, the contour is a rectangle. The number in each node represents the number of messages that are handled by the node. As may be noticed in Fig. 10, the nodes close to the top left diagonal edge of the contour have many more messages than the other nodes.

Uniform spreading.
Observation 5
A series of simulations using uniform spreading revealed that the nodes along one path in the contour always handled more messages than the other paths.
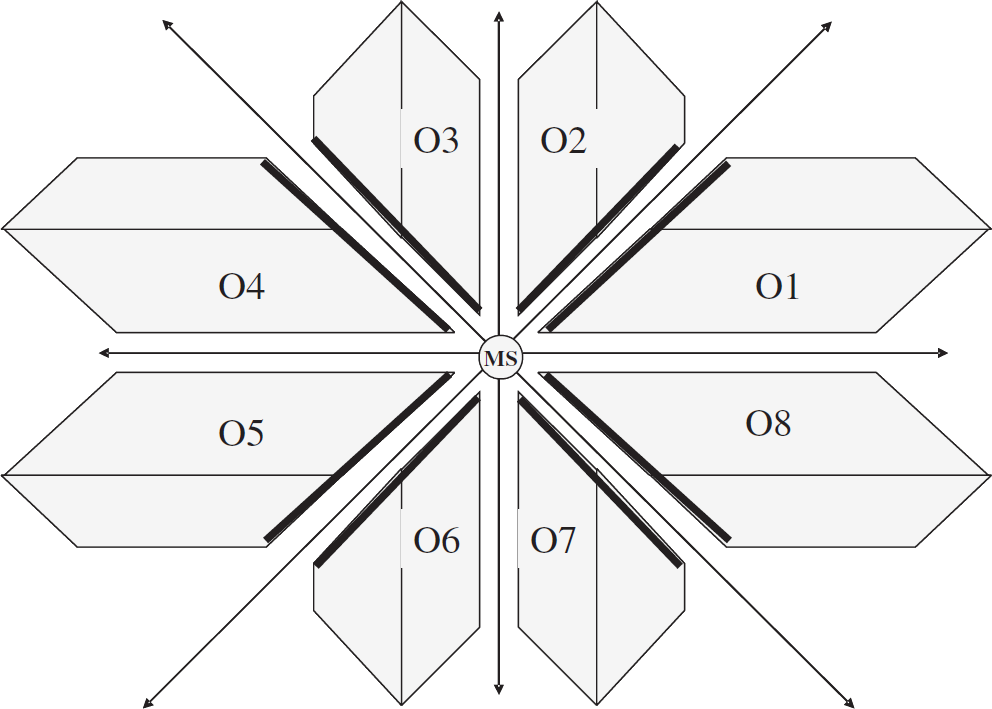
Figure 11 shows a monitoring station located at the center. The plane is divided into eight octants. For convenience, the octants are named O1, O2, …, O8 in the counterclockwise direction as shown.

Orientations of a contour.
When xydiff = 0, the source node will lie on one of the diagonal lines and the contour comprises a single path (Lemma 1). When x diff = 0 and y diff ≠ 0, or y diff = 0 and x diff ≠ 0, the contour will be symmetrical around the non-zero axes. In all other cases, most of the shortest paths in the contour lie in the same octant as the one in which the source node is located.
Definition 3
When xydiff ≠ 0, or xdiff ≠ 0, ydiff ≠ 0, the orientation of a contour is the number of the octant in which the source node is located.
The right side of Fig. 11 shows a contour with Orientation 1. Most of the shortest paths in this contour lie in octant 1.
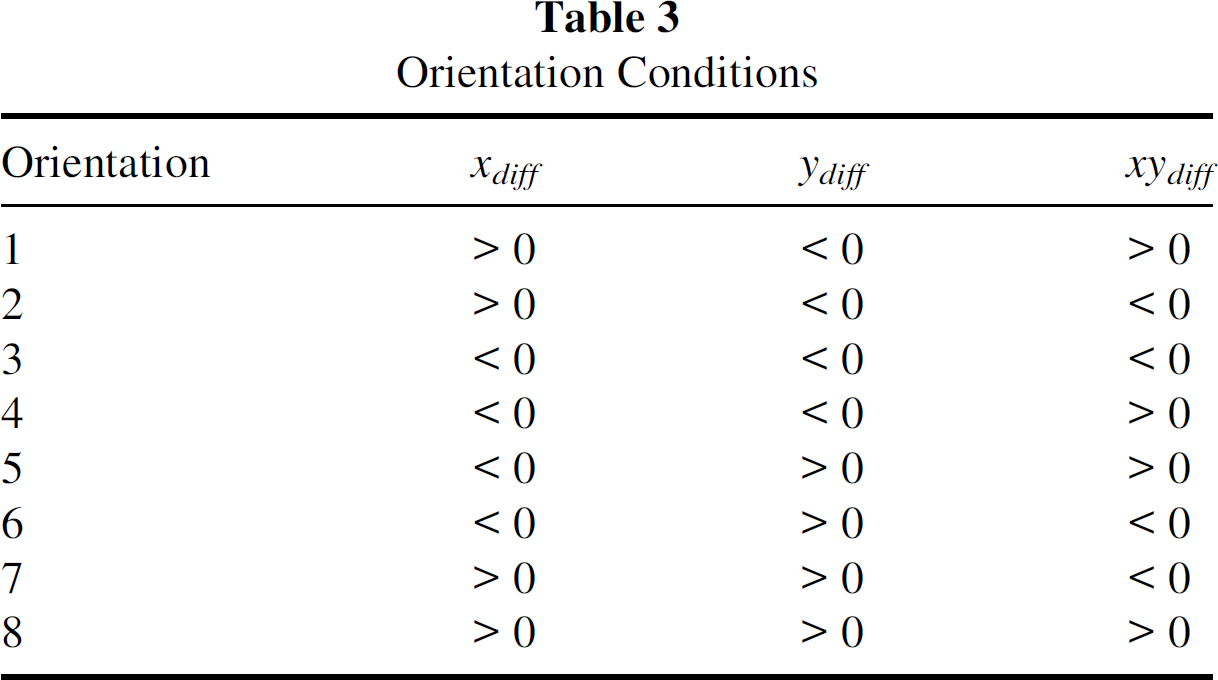
It was observed through simulations that when the orientation of the contour is 1, nodes on the path closer to the diagonal line always handle more messages then the other nodes in the contour. The nodes that appear in the light colored area in Fig. 11 handle most of the messages. Further, irrespective of the orientation of the contour, nodes on the path closest to the diagonal lines, which divide the plane into octants, always handle more messages than other nodes in the contour. Figure 12 shows the contour in eight possible orientations 4 . The solid lines in Fig. 12 depict the paths on which nodes that handle most messages are located.
Eight possible orientations for contours.
Let
Orientation Conditions
Based on the above simulation observations, methods to effectively spread the messages over the
available paths in a contour were explored. The theorems from Section 3.1 were used by each node to compute the contour.
The heuristic method for spreading depends on recognizing that each node can also compute the width,
w of the contour at its own location because it knows the distance from itself to
the source and the sink and all the corner nodes of the contour. When the messages are spread
ideally, each node will handle

Ideal messages loading in the contour.
As shown in Fig. 14, starting from the source, messages must be spread only for the first κ steps. After κ steps, the nodes select one shortest path towards the sink and not spread the messages as long as the number of nodes at the next step is equal to the number of the nodes in the current step. The nodes within κ steps from the sink must aggregate messages from the nodes in the preceding step. The theorems in section 3.1 used by the node to determine the contour.
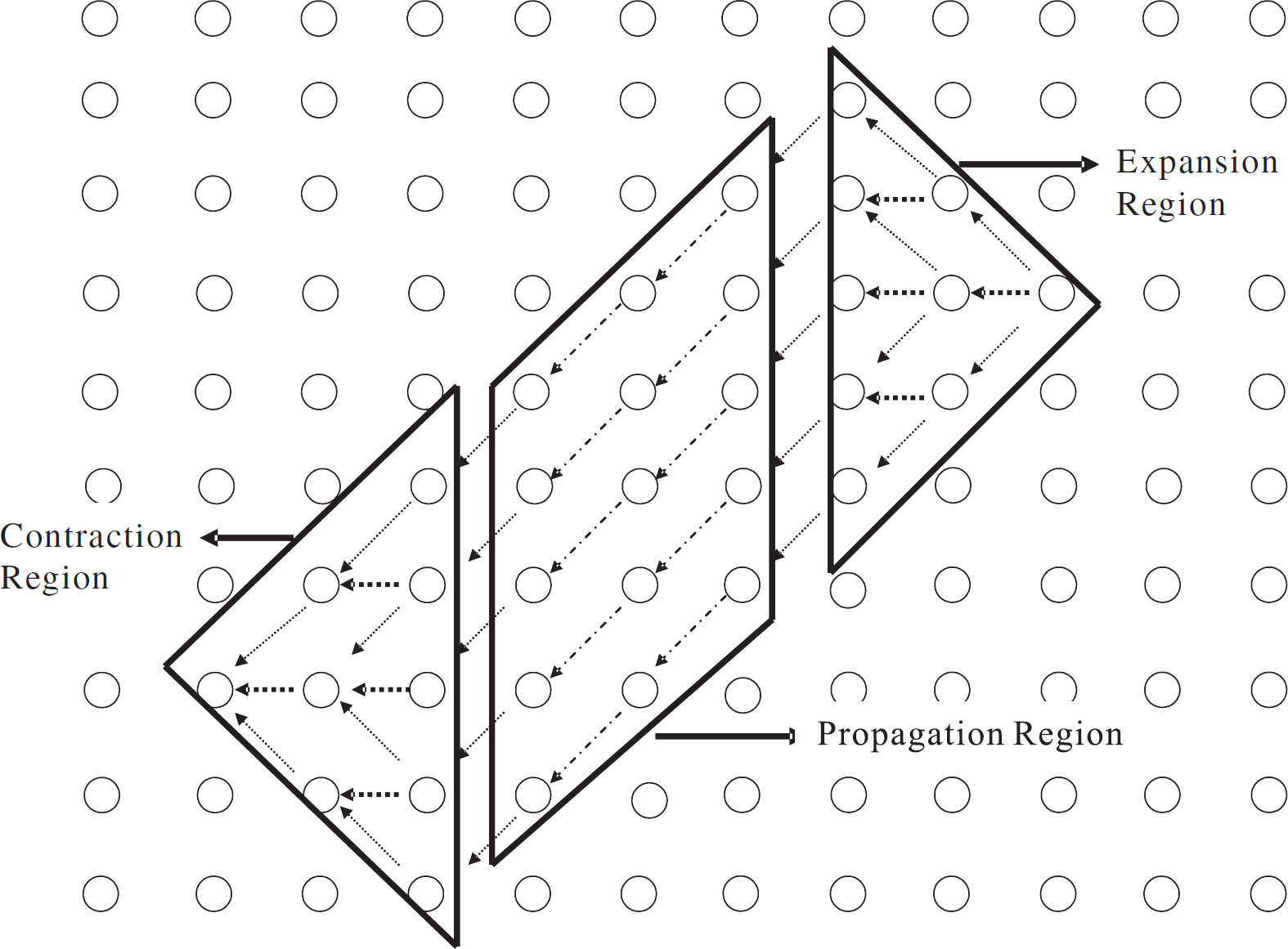
Three regions of contour.
The three regions of a contour are referred as the Expansion region, Propagation region, and the Contraction region and appear in every contour with a small variation between the rectangle shaped contour and the hexagon shaped contour.
Observation 6
In the expansion region, when each node is carrying an ideal number of messages, a node in a row of width w does not have sufficient number of messages for two nodes in the next row, i.e., row of width w + 2.
Proof
Since
To illustrate the heuristic, consider Fig. 15. The nodes are in two successive rows of the expansion region in a contour. For convenience assume that the nodes are labeled as shown and that there are odd number of nodes in each row.

Heuristic spreading in expansion.
Definition 4
Let w be the width of the contour in some row of the expansion region, and w
+ 2 be the width in the next row of the contour. Let w be odd. Let the nodes be
labeled with, 1,2,3, …, ⌊w/2⌋ as shown in
Fig. 15. Then, node i sends


For example in Fig. 15, when N = 70, w = 5, then, for the diagonal node node 1 sends 10 messages to node A, node 2 sends 6 messages to node B, etc. and for the node straight below, node 1 sends 4 messages to B, node 2 sends 8 messages to C, etc.
Using this heuristic, node A receives
Definition 5
Let w be the width of the contour in some row of the propagation region, node i sends all its messages to the node i in the next row.
Definition 6
Let w be the width of the contour in some row of the contraction region, and w − 2
be the width in the next row of the contour. Let w be odd. Let the nodes be labeled with
1,2,3, …, [w/2] as shown in Fig. 16. Then, every node i sends


Heuristic spreading in contraction region.
For example in Fig. 16, when N = 70, w = 7, then, for the diagonal node, node 1 sends 10 messages to node A, node 2 sends 6 messages to node B, and node 3 sends 2 messages to node C, etc. For the node straight below, node 2 sends 4 messages to node A, and node 3 sends 8 messages to node B, etc.
When the contour is a hexagon, there are special cases that must be considered. If w is the maximum width of the expansion region, the width of the propagation region is w + 1. The expansion heuristic (Definition 4) can be used by labeling the nodes as shown in Fig. 17. Similarly, when the maximum width of the contraction region is w − 1 and the contraction heuristic (Definition 6) can be used by labeling the nodes as shown in Fig. 18.

Heuristic spreading in transition region.

Heuristic spreading in transition region.
Contour guided dissemination was validated via simulation and experiments. Section 4.1 presents the simulation tools used and Section 4.2 presents the results of the simulation. The number of messages handled in each node was used as the metric.
Simulation Approach and Tools
All the code developed for this investigation was developed in the NesC language [2] in the TinyOS environment [2]: targeting the MICA2 platform [1].
TinyOS
Four TinyOS components were developed to implement Contour Guided Dissemination. These components are shown in Fig. 19. DiscreteSensorM was used to generate periodic messages that represent values acquired from sensors. UpdateNeighborListM was used to periodically update the neighbors of each node. DiscreteSensorM sends events to HeuristicDS; this component implements the Heuristic spreading strategy. To implement weighted spreading or uniform spreading, the HeuristicDS components is replaced by a suitable component. TestHeuristicDS is a top-level component that is used to “wire” DiscreteSensorM, UpdateNeightborListM, and HeuristicDS into a Contour Guided Dissemination application.

Contour guided dissemination application.
The new components were simulated using TOSSIM [2]. The messages exchanged between nodes was viewed for debugging purposes using TinyViz [30], which is a visualization tool. TOSSIM also include a default propagation model for the wireless signals between nodes. Concern about the weakness of the propagation model in TOSSIM are well documented in literature [31]. Since the metric for this investigation was the number of messages handled, the known weaknesses were not a hinderance to this investigation.
To ensure that components are valid, they were compiled and executed in 4 MICA2 nodes. To ensure the consistency of the results, a plug-in extension to TOSSIM called PowerTOSSIM was used. PowerTOSSIM is based on an accurate model for energy consumption in the MICA2 platform [1]. When using PowerTOSSIM, it was ensured that each node of each step in the contour used approximately the same amount of energy. Since energy used linearly increases with the number of messages handled, this metric was useful to validate results. To ensure that the implementation of Contour Guided Dissemination was free from any other restrictions of the TOSSIM simulator, the components were validated via experiments in a 4 by 4 grid MICA2 nodes.
Simulation Results
The simulation results reported here were conducted on a grid of 9 × 9 motes. Every node can only communicate with 8 of its immediate neighbors (see Fig. 6). The maximum number of hops to the sink was 8. Two different source nodes were selected to obtain a hexagon contour and a rectangle contour. The selected source sent 100 messages to the sink.
Flooding with Duplicate Elimination
As a baseline measurement, the number of messages received by each node is measured when using flooding. In flooding, the source node sends each message to all its neighbors. Each node that receives a message forwards that message to all its neighbors. This process continues until the message is eventually received by the sink. To reduce the cost of flooding, duplicate elimination was used. Whenever a node received a message that it had already received before, the received message was discarded.
Flooding with Duplicate Elimination (FWDE) is an expensive method for communication. The number of messages received at each node after 30 sec and after 60 sec is shown in the top of Fig. 21. The bottom of Fig. 21 shows the messages after 90 seconds and 120 sec. As may be noticed, all the nodes receive the same number of messages and if 100 messages are sent, these 100 messages are received at all the nodes. Hence the energy consumption is really high in the network in order to forward all messages to the sink.
Gossiping with Duplicate Elimination
Gossiping with Duplicate Elimination (GWDE) is an alternative to flooding that can be used in dense systems. Instead of sending a message to all its neighbors, a node will randomly select one of its neighbors to send the message. Compared to flooding, this approach reduces the total number of messages that are sent. Despite the large number of messages that are sent, because of message loss and the random selection, the end-to-end delivery rate is neither consistent nor reliable. Figures 20 and 21 show the progression of messages after 30, 60, 90, and 120 sec.

Flooding after 30 and 60 sec.

Flooding after 90 and 120 sec.
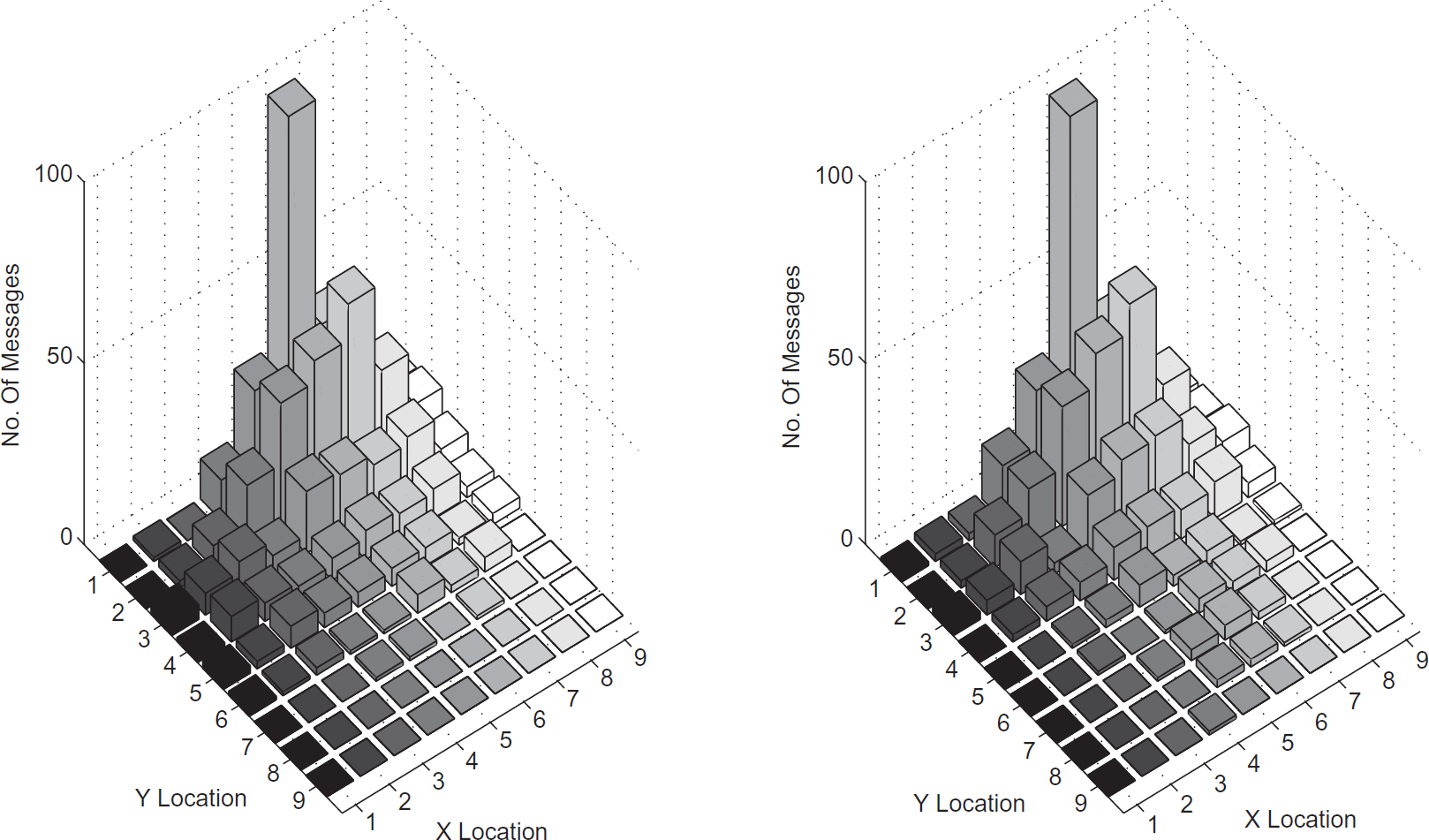
Figure 25 shows the number of messages in each node for the Contour Guided Dissemination method using uniform spreading. In this case, the contour of the shortest paths was a hexagon and a rectangle. Both these contours are in region 2 and it can be seen that the nodes along the diagonal carry more messages than other nodes in the contour. In other words, it is the heavily loaded boundary in the contour.
Gossiping after 30 and 60 sec.
Gossiping after 90 and 120 sec.

Contour guided dissemination - uniform spreading in hexagon.

Contour guided dissemination - uniform spreading in rectangle.
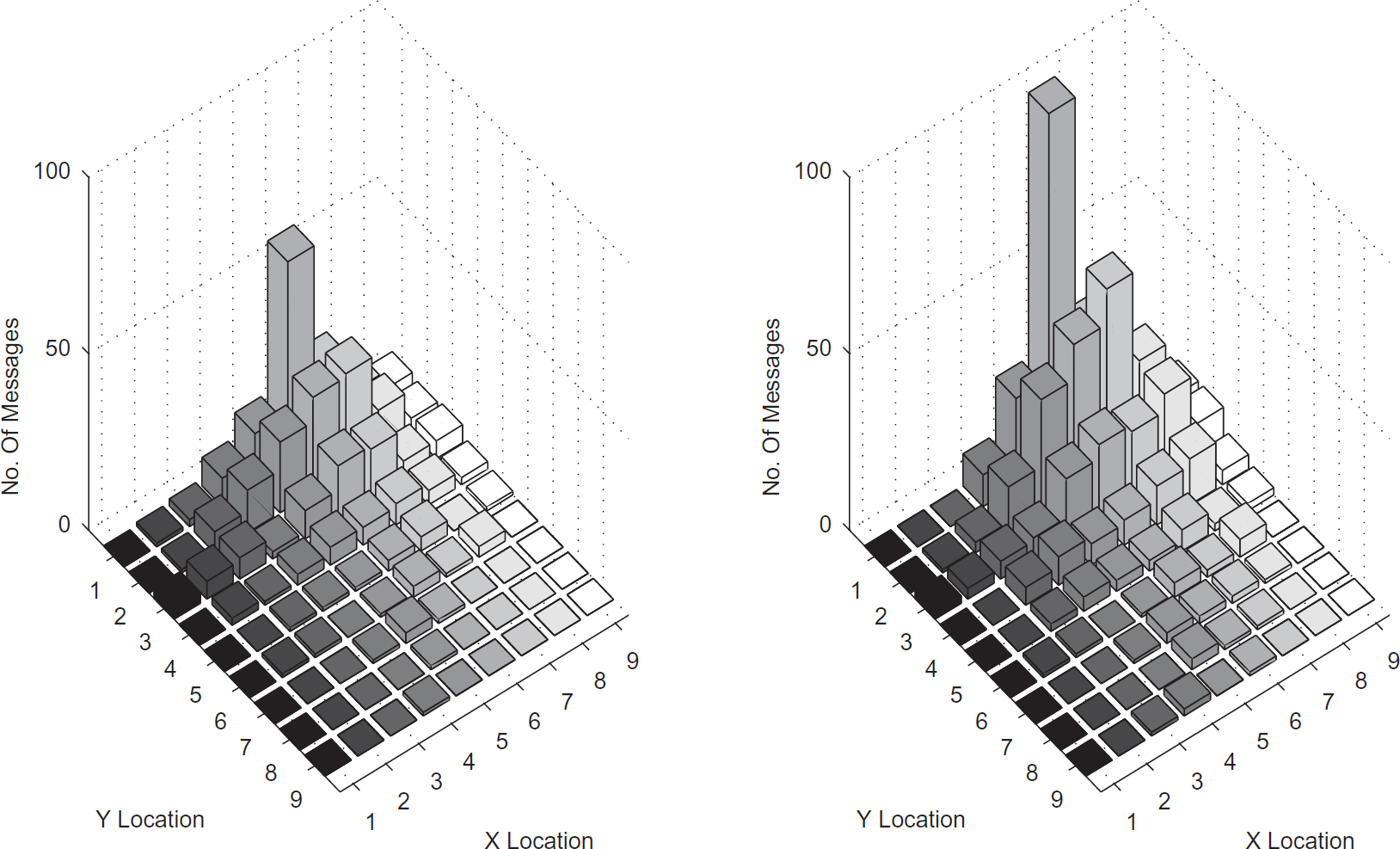
Figure 27 shows the number of messages in each node for the Contour Guided Dissemination method using weighted spreading. Because the region of the contour is known, the weighted parameters can be chosen so that more messages can be sent away from the diagonal line boundary. Therefore, the heavily loaded boundary condition in uniform spreading can be mitigated. The results are shown for both a hexagon contour and for a rectangle contour.
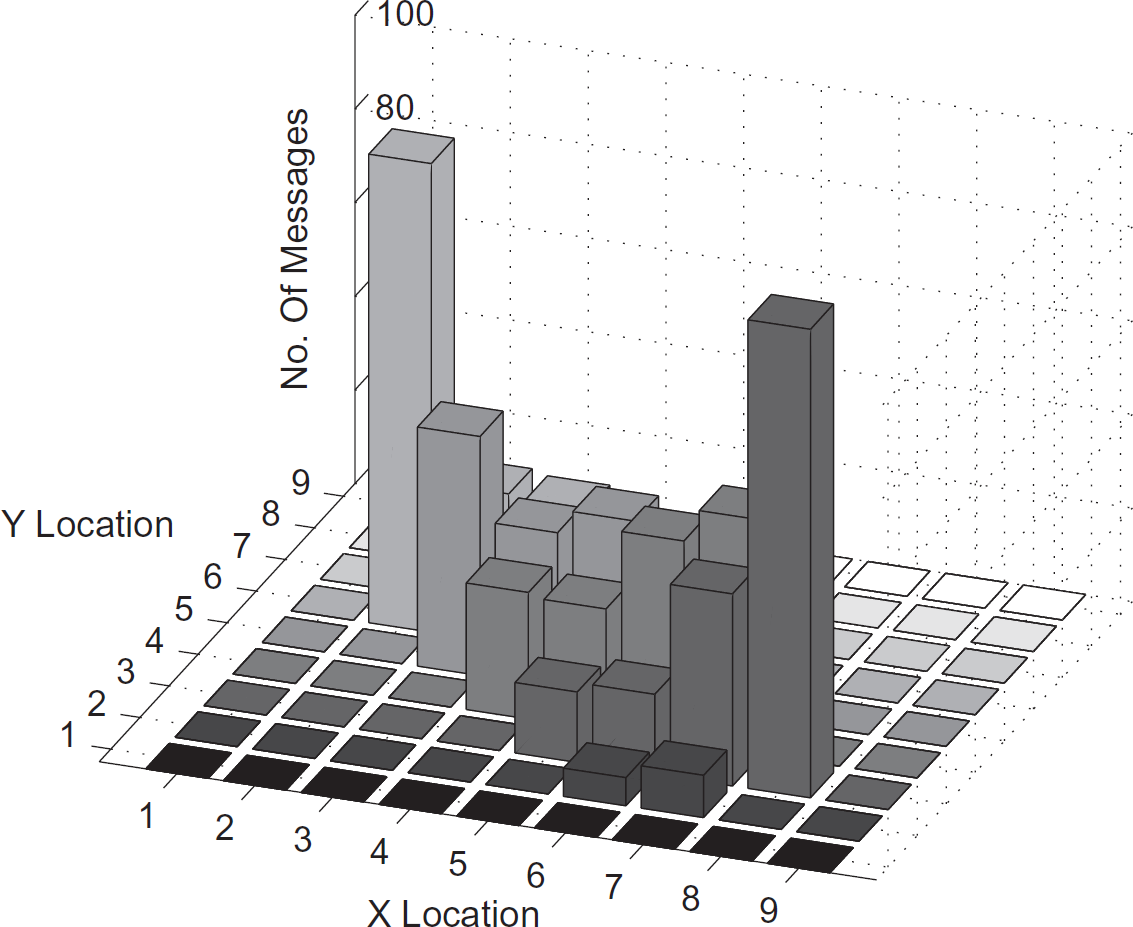
Contour guided dissemination - weighted spreading in hexagon.
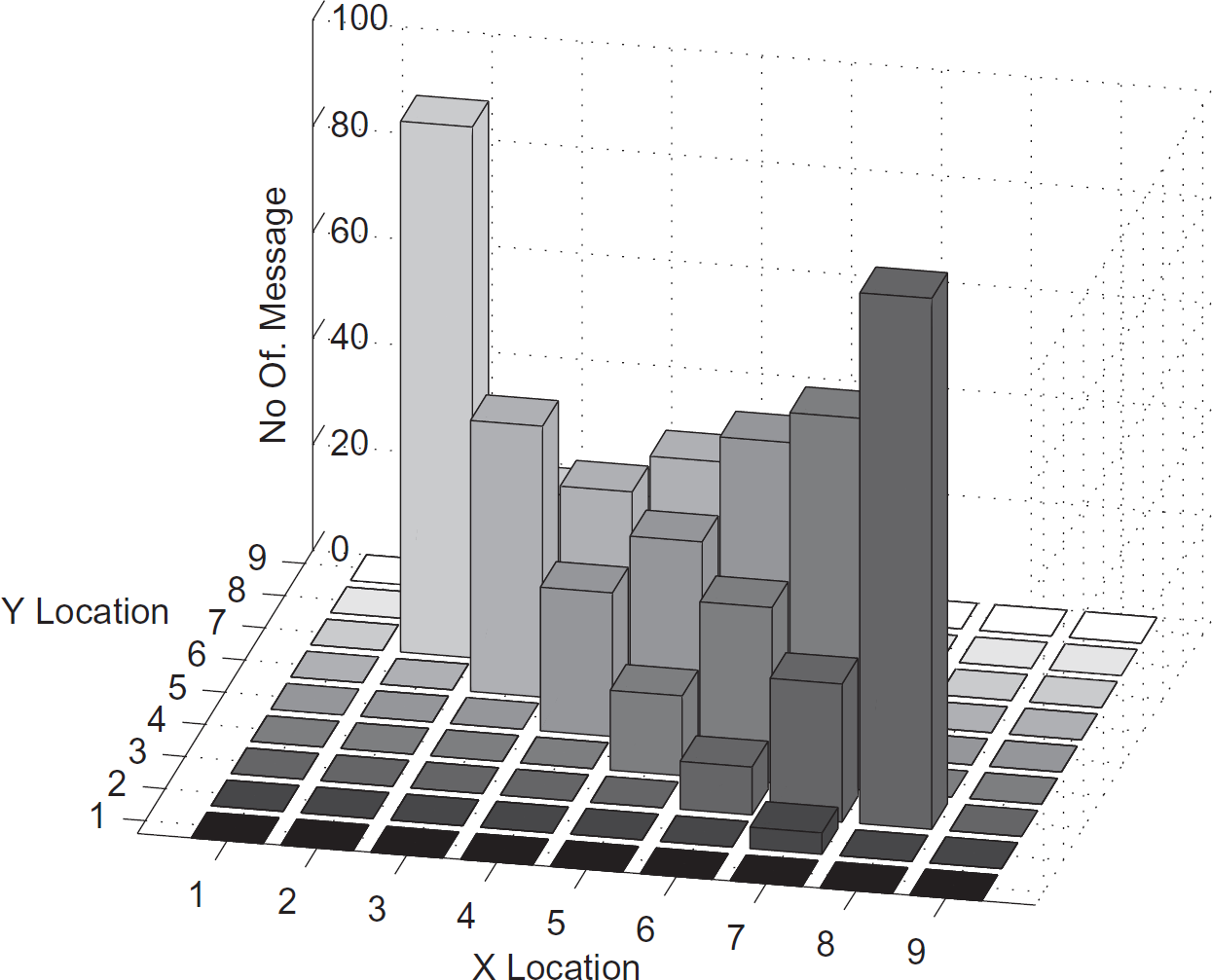
Contour guided dissemination - weighted spreading in rectangle.
Figure 29 shows the number of messages in each node for the Contour Guided Dissemination method using the heuristic spreading method. It may be noticed that the number of messages in the contour is almost the same for all the nodes except the source and the sink.
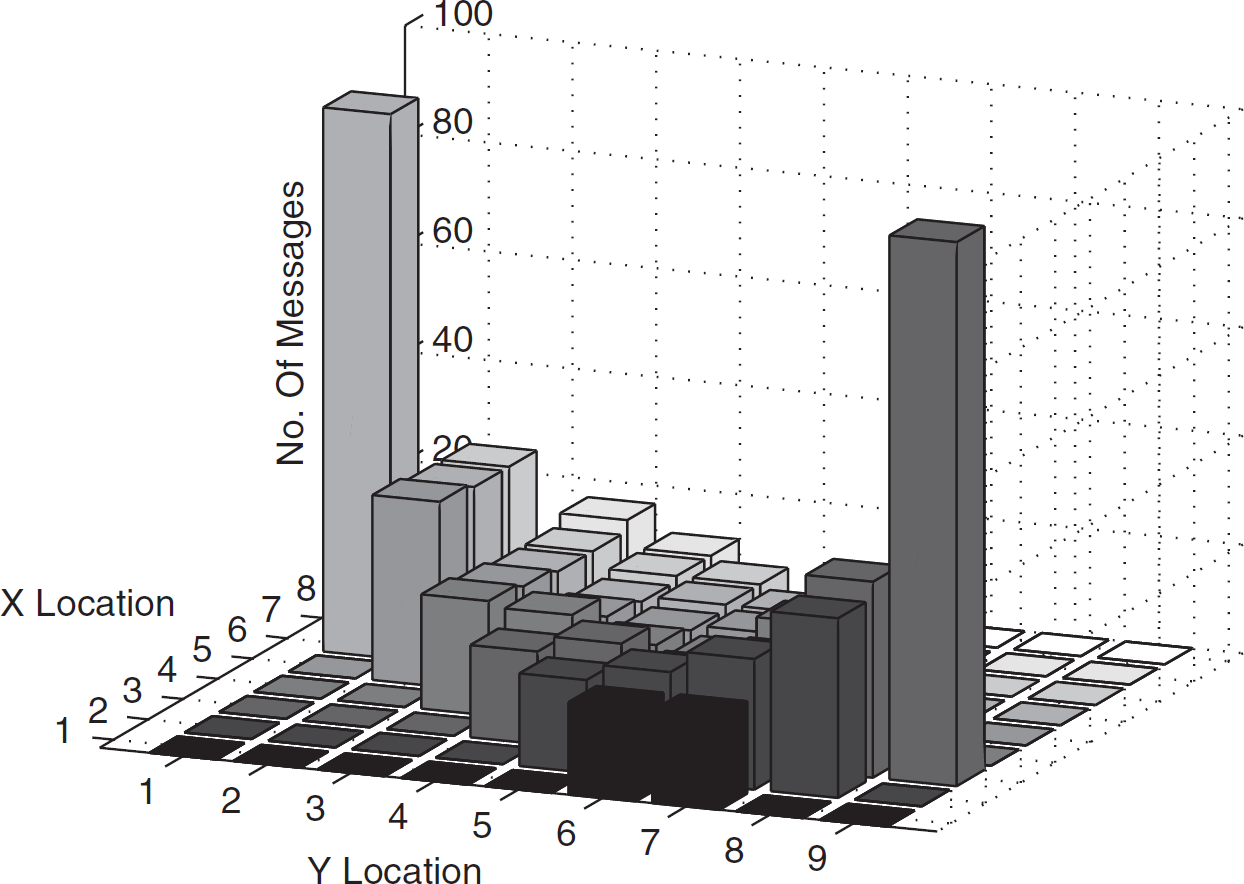
Contour guided dissemination - heuristic spreading in hexagon.

Scalability comparison.
FWDE is the easiest way to disseminate messages in the network, but this approach suffers from a tremendous amount of traffic because FWDE neglects the location of the sink and forwards the message to all its immediate neighbors. GWDE has less congestion in the network compared to FWDE. However, the end-to-end delivery rate is not high.
Uniform spreading in the shortest-path contour is the simplest form of Contour Guided Dissemination (CGD). Simulation results show that it performs better than simple methods that are based on a single path. Due to its simplicity, it has a heavily loaded boundary. The weighted spreading scheme mitigates this problem to an extent. Heuristic spreading performs well. This approach is a little complex in computation and the routing decision will depend on the source of the packet and the location of the sink and location of the node in the contour. To support the heuristic spreading scheme, the source must include the number of messages it is sending in the packet. This requirement is typically not unreasonable because in many engineering systems, diagnostic messages are sent in response to queries and based on the type of query, it will be possible to estimate the number of messages that must be sent.
Figure 29 shows a comparison between FWDE and Contour Guided Dissemination. It was noticed from the simulation that since the nodes using FWDE forward every message received, the maximum number of messages in the network grows at O(n2). On the other hand, it was observed in simulation that the number of messages in the network grows at O(n) when Contour Guided Dissemination was used. Figure 29 illustrates that Contour Guided Dissemination is more scalable than FWDE.
Conclusions
We presented a new approach, called Contour Guided Dissemination, for disseminating messages in networked embedded systems. This method exploits all the shortest paths available between a source and a sink.
The union of all the shortest paths between a source and a sink was defined to be a contour. The results in Section 3 show that when the value xy diff is even, the shape of the contour is a rectangle and when xy diff is odd, the contour is shaped like a hexagon. Because the theorems in Section 3 provide the locations of the corner nodes of the contour, these results are sufficient to allow each node to compute the contour in a distributed manner, and to identify its own position in the contour.
It was shown that when the messages are spread uniformly over the available paths, nodes on one edge of the contour handle more messages than the other nodes in the contour.
A heuristic spreading strategy was presented. It was shown through simulation results that the heuristic spreading strategy ensures that all the nodes in the same row on the contour handle approximately the same number of messages. Simulation results also show that the cost of communication in CGD compares very favorably with the cost of flooding. The cost of dissemination in this method increases linearly with the size of the grid.
Although the results were based on a regular topology, these results suggest new methods for dissemination in networks with general topologies. In such networks, some nodes must spread the messages, while other nodes must utilize one of the available paths without spreading the messages further. Identifying the structure of contours, expansion regions propagation regions, and contraction regions for networks with general topologies are interesting problems and the method presented here provides a systematic framework in which to carry out future investigations.
Footnotes
1
In addition to the sensors and actuators on the modules such an application would use additional devices such as cameras, RFID tags and scanners, weighing scales, etc., to inspect the entities that are being moved.
2
Such communication can be achieved by designing a suitable Medium Access Control protocol, using low-power steerable antennas, or multiple frequencies.
3
The assumption is that every monitoring station that wishes to receive monitoring messages from the networked embedded system will first register itself. This information is percolated through the network and every node is aware that there is a monitoring station that is interested in receiving messages.
4
Only the light colored part of the contours are shown.