
Abstract
Some object tracking applications can tolerate delays in data collection and processing. Taking advantage of the delay tolerance, we propose an efficient and accurate algorithm for in-network data compression, called delay-tolerant trajectory compression (DTTC). In DTTC, a cluster-based infrastructure is built within the network. Each cluster head compresses an object's movement trajectory detected within its cluster by a compression function. Rather than transmitting all sensor readings to the sink node, the cluster head communicates only the compression parameters, which not only provide the sink node expressive yet traceable models about the object movements, but also significantly reduce the total amount of data communication required for tracking operations. DTTC supports a broad class of movement trajectories using two proposed techniques, DC-compression and SW-compression, and an efficient trajectory segmentation scheme, which are designed for improving the trajectory compression accuracy at less computation cost. Moreover, we analyze the underlying cluster-based infrastructure and mathematically derive the optimum cluster size, aiming at minimizing the total communication cost of the DTTC algorithm. An extensive simulation has been conducted to compare DTTC with competing prediction-based tracking technique, DPR [28]. Simulation results show that DTTC exhibits superior performance in terms of accuracy, communication cost and computation cost and soundly outperforms DPR with all types of movement trajectories.
Introduction
Object tracking is a killer application of wireless sensor networks. In this application, the sensor nodes collectively monitor and track the movements of moving objects. As other types of sensor network applications, object tracking in sensor networks is constrained by limited on-board, non-refreshable battery power, computation capability, and storage. This has spurred a need for designing techniques tailored specifically toward object tracking sensor network environments to allow optimized tradeoff between the energy consumption, network performance, and operation fidelity.
A wide range of object tracking applications can be categorized into real-time tracking and delay-tolerant tracking. In real-time object tracking, since a sink node watches the movements of a moving object closely, the sensor readings are collected in real time. For instance, a battle field surveillance application requires real-time tracking of enemy soldiers to facilitate prompt decision making. Other real-time tracking applications include highway navigation, emergency warning, and disaster rescue [3, 13]. On the contrary, in delay-tolerant object tracking, a sink node can tolerate a delay in collecting sensor readings. For example, in wildlife habitat monitoring, scientists only need to know the approximate movement trajectory of a group of zebras, instead of their real-time movements [21, 30].
The existing tracking techniques in sensor networks are usually designed to meet real-time requirements. In order to avoid continuous updates about locations of tracked objects from sensor nodes to the sink node, many existing tracking techniques predict the future locations of a moving object based on its movement history [1, 9, 14, 26, 28, 29]. The basic idea is described as follows: when the prediction made by a sink node is correct, sensor nodes do not report their readings to the sink node. Otherwise, sensor nodes correct the sink node by sending their readings. However, in practice, the movement trajectory of moving objects is complex. Individual objects may exhibit completely different movement patterns, which poses significant challenges for a prediction-based tracking technique to accurately predict the object movements. Moreover, some prediction-based techniques derive movement probability models from the movement history of a group of objects that share the similar movement pattern. The future movements of a moving object are predicted based upon the corresponding movement prediction models. However, these techniques make a strong assumption that there are a small number of movement states (e.g., moving speed and direction) that a moving object can follow, such that prediction models can be stored locally at the sensor nodes and the probability for an object taking a future movement state can be calculated efficiently.
In addition to the above deficiencies, the prediction-based tracking technique is not the best
choice for delay-tolerant object tracking, which, by releasing the timeliness requirement, provides
significant opportunities for optimizing other performance metrics in tracking operations, e.g.,
communication cost. In this paper, we investigate a novel technique, called delay-tolerant
trajectory compression (DTTC), for delay-tolerant object tracking sensor networks. DTTC is
able to present a sink node accurate movement trajectory of a moving object at significantly
decreasing communication cost. Specifically, in DTTC, a cluster infrastructure is organized inside
the network. Each sensor node reports its readings to the cluster head for further signal processing
and data aggregation. This infrastructure is widely used in wireless sensor networks for improving
energy efficiency in various operations, such as data fusion and in-network processing [7, 11]. Instead of sending the object's locations at
consecutive time instants, the cluster head aggregates and compresses those data by a compression
function and only sends a set of compression parameters that model the movement trajectory of the
tracked object to the sink node. To compress a complex movement trajectory precisely and
efficiently, DTTC employs a trajectory segmentation technique, which divides the
whole trajectory into segments, and applies a relatively simple compression function to each
segment. However, obtaining segments with the right length is not a trivial task. One
straightforward solution is to divide the trajectory evenly into segments with the same length,
without considering the trajectory shape. This approach could lead to unnecessary segmentation for
the trajectory which is smooth enough to be compressed by one function, and there is insufficient
segmentation when more segments are needed. As a result, both compression error and computation
overhead increase. In this paper, we study an intelligent trajectory compression method, which, by
taking into consideration the pattern in movement trajectory, forms segments with the right length
in one scan of given data. Upon obtaining segments, two compression techniques, namely,
DC-compression and SW-compression, are studied for different
object movement patterns. In addition to the trajectory compression technique, we study the impact
of the underlying cluster infrastructure on DTTC's communication cost, by considering
tracking factors and parameters (including reporting duration, object's moving speed, network
scale, and size of transmitted packets). The optimum cluster size is mathematically derived aiming
at minimizing communication cost. Our contribution can be summarized as follows: We propose the DTTC technique for delay-tolerant object tracking in wireless sensor networks.
DTTC compresses a sequence of location points that depict the movement trajectory of a tracked
object into a set of compression parameters. DTTC significantly decreases the total amount of data
communication in the tracking operation. We carefully craft a trajectory segmentation scheme, which segments a trajectory with one scan of
the data. The scheme empowers DTTC the ability of precisely and efficiently compressing complex
trajectory that has frequent changes in movement states (e.g., moving directions). Two trajectory compression techniques, DC-compression and SW-compression, are proposed to reduce
the computation overhead for different movement patterns. We analyze the impact of cluster infrastructure on the communication cost of DTTC and
mathematically derive an optimum number of clusters, aiming at minimizing the total energy
consumption. The analysis provides important insights on configuring the cluster infrastructure and
optimizing the performance of DTTC. We provide an extensive experimental study of a proposed DTTC technique with various movement
trajectories (i.e., both linear and non-linear movements) and make comparisons against a
prediction-based tracking technique. DTTC demonstrates superior performance in accuracy,
communication cost, and computation cost.
The rest of the paper is organized as follows. Section 2 examines the related work. In Section 3, we state the tackled problem, and present the design of DTTC. Section 4 analyzes the appropriate cluster size for use in DTTC and Section 5 reports experimental results. Finally, Section 6 presents concluding remarks.
Related Work
Due to the extremely frugal power budget for sensor nodes, energy usage is one of the most critical factors that determine sensor network applicability in reality. Network communications, especially long-distance communications, are identified as the power bottleneck in sensor network systems, thus becoming the target area of various optimizations [12, 22]. With the same design goal as much existing work, we examine some energy-saving techniques proposed for communication reductions for sensor networks 1
Suppression and Prediction
Two primary strategies used for reducing sensor network communication are suppression and prediction. These two techniques both achieve energy efficiency by keeping sensor nodes from transmitting data. Suppression is based on local collaborative information processing; while prediction, by involving higher-level applications, is categorized as a wide-area collaborative information processing technique [23].
temporal suppression: each node reports its readings only if the reading changes
noticeably since its last transmission. However, when all nodes change, limited
energy savings can be achieved. spatial suppression: sensor nodes suppress transmissions when their readings are close enough to
their neighbors.
Some exiting energy-efficient protocols designed for sensor networks, including [19, 24, 25], utilize suppression techniques. However, sensor readings about object movements (e.g., locations of a moving object) do not have strong temporal or spatial correlations.
Based on the movement history used for prediction, prediction techniques can be classified into prediction with individual history and prediction with group history. The prediction with individual history (e.g., [9, 26, 28, 29]) predicts the movement of an object from its own history. Considering the randomness in object movements in practice, simple prediction models in the existing work (e.g., CONSTANT, AVG, EXP_AVG) could result in poor prediction performances, which in turn incurs more communication for correcting the sink node. The prediction with group history for a moving object is made based on the movement history of all objects that share the same movement pattern with the tracked object. Group history provides richer information about object movements, thus more advanced techniques can be applied to extract the movement pattern for a group of objects [1, 4, 8, 14, 18].
However, these techniques assume a limited (and small) number of movement states (e.g., moving speed and direction) that an object can have, such that probability for objects taking each state can be calculated and used for future predictions.
Aggregation
Aggregation techniques are also widely used for reducing network communications [5, 6, 10, 16, 17, 20, 27]. Different from suppression and prediction techniques, aggregation techniques do not restrain sensor nodes from reporting their readings, but try to reduce the total amount of data transmitted.
There are two types of aggregations. The first approach, called the operator-based approach, reduces data communications by performing simple aggregation according to the query operator specified by the application, such as MAX, MIN, AVG, COUNT, and SUM [5, 16, 17, 20, 27]. However operator-based aggregation may lose much of the original structure in the data, providing coarse statistics that smooth over interesting local variations. The aggregation result can only answer one or a few types of queries. Moreover, operator-based approaches are not feasible for object tracking sensor networks, which is interested in obtaining continuous objects' movement states. The second aggregation approach, called the model-based approach, is a more general aggregation technique [10, 20]. Our proposal DTTC falls into this category. The model-based approach focuses on capturing and modeling the correlations existing in a set of sensor readings. Rather than sending all raw sensor readings to the sink node, the network only reports the model parameters, from which the sink node can reconstruct the shape and the structure of the ordinal data. Different from the existing model-based aggregation techniques, DTTC faces different research challenges. First, the movement states of an object may change frequently, such that it is impossible to use one model to capture the entire trajectory. Furthermore, supported by a cluster-based infrastructure, the configuration of the clusters is critical to the performance of DTTC. We address these issues in this paper.
Design of Delay-Tolerant Trajectory Compression
We first discuss the basic idea of delay-tolerant trajectory compression (DTTC) in Section 3.1. The detailed trajectory segmentation scheme and compression techniques are discussed in Section 3.2 and Section 3.4, respectively.
Basic Idea of DTTC
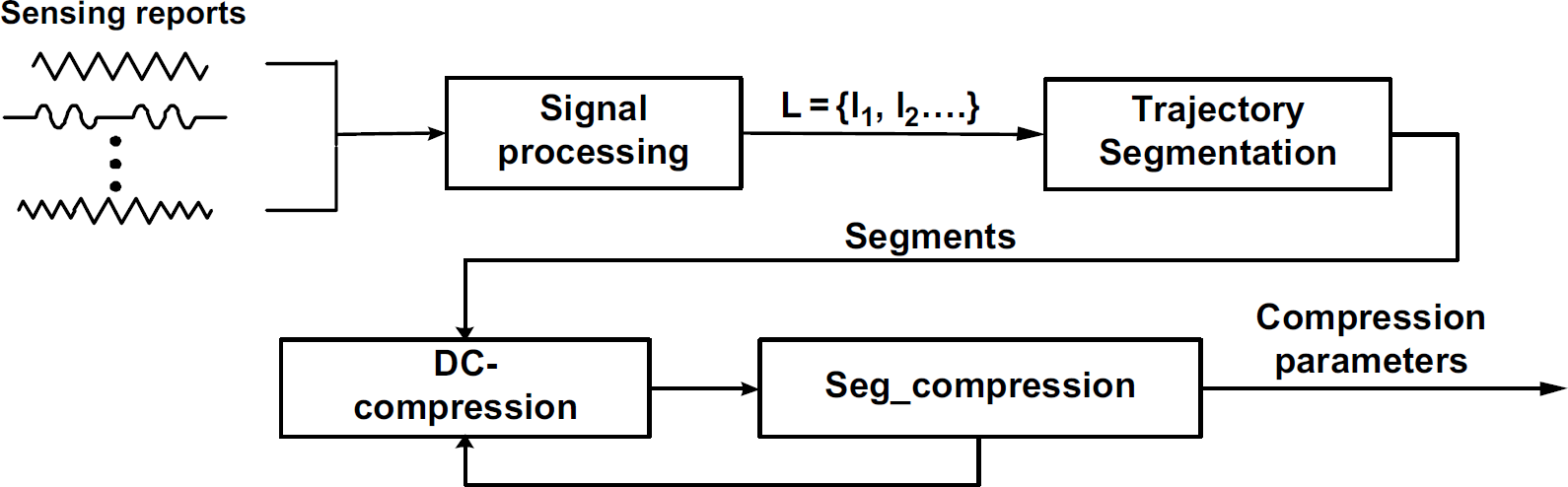
In DTTC, a cluster infrastructure is formed within the network where sensor nodes report their readings to the cluster head for data fusion 2 . Reporting duration, a period of time between two consecutive sensor reports from sensor nodes, is specified by the object tracking applications. To simplify our presentation, we assume that the sensor nodes have synchronized clocks. However, our work can be easily adapted for unsynchronized networks. At time t, a set of sensor nodes that detect the moving object participate in object tracking and report their readings to the cluster head. A report packet from a sensor node is denoted by <t, R, Sid, Oid>, where R represents the sensor readings from node Sid about moving object Oid stamped at time t. As multiple sensor nodes may detect and track the same moving object, the cluster head is likely to receive several sensor reports with the same time stamp. By processing multiple reports with the same t (shown as signal processing in Fig. 1), the cluster head derives the movement state, i.e., geographical location, for object Oid at time t, denoted as <t, x, y, Oid>, where x and y are the geographical coordinates for Oid at t by assuming a two-dimensional space.
DTTC with DC-compression technique.
Instead of reporting to the sink node the movement trajectory of object
Oid, represented by a sequence of geographical locations denoted by
Trajectory_Compression operations in DTTC focus on compressing movement trajectory
DTTC addresses the above problem based on the observation that a trajectory can be segmented. The piece-wise segments can be approximated with a relatively simple compression function (e.g., a quadratic model or even a linear model when the segments are small enough). In the following, we present the compression techniques for a given segment, followed by two alternative compression techniques and a trajectory segmentation scheme. The overview of DTTC with DC-compression technique is shown by Fig.1. DTTC with the SW-compression technique has a similar flow.
A segment S is characterized by a set of parameters: ts and te: the timestamps representing
the time when the first and last l in segment S are generated by
the sensor nodes, i.e., S(ts, te) =
{li = <ti, xi, yi,
O>|ts ti <
te}, and thus determining the length of a segment. We denote
x(ts, te) =
{xi|xi ∊ S(ts,
te)}, and y(ts, te)
= {yi|yi ∊ S(ts,
te)}. xts and xte: the
x-coordinates of the first lts and of the last
lte in segment S. These two values are used
by the sink node to reconstruct the movement trajectory of an object. β and ∊: β represents the compression parameters of segment
S, and β = (β1, β2, …,
β
m
). ∊ is the error introduced by the compression on a
segment S. In this paper, we adopt the root mean squared error
(RMS), which is widely used as the error metric in regression techniques. Other error
metrics can also be used by DTTC with minor changes.
Subroutine Seg_Compression() shown in Algorithm 1 is at the core of DTTC. This function compresses a segment of movement trajectory, i.e., S(ts, te), and computes the regression parameters β, as well as the compression error ∊. The compression function is represented as

where Φ0, Φ1, …, Φ m are functions of x(ts, te). For instance, when Φ0 = 1, Φ1 = x(ts, te), …, Φ m = x(ts, te) m , y(ts, te) = β0 + β1x(ts, te) + … + β m x(ts, te) m . By setting reporting duration as one time unit, the compression function can be represented in vector notation,


Seg_Compression()
Algorithm 1 can be executed once a
segment is identified. A naive way of constructing segments is to divide the movement trajectory
to minimize the total number of segments, which, however, may generate more parameters for each
segment, as a longer segment of movement trajectory is very likely to require a more complicated
compression function with more compression parameters; to minimize the number of parameters (i.e., β) for each segment, which implies using
simpler compression functions. In this case, to ensure ∊ < ξ, the total number
of segments may increase. As the compression function is usually pre-determined by applications, we
study two compression techniques that aim at minimizing the total number of segments to be
compressed for a given compression function (e.g., a m-degree of polynomial
compression function).
We introduce two compression techniques, namely, Divide-and-Conquer compression (denoted as
DC-compression) and Stepwise compression (denoted as SW-compression), both of which aim at
minimizing the total number of segments and reducing the total amount of data communications, with a
given compression function. Meanwhile, these two techniques target on different movement patterns
that an object may follow. We assume that the movement trajectory of a moving object
DC-Compression
The DC-compression is based on the idea of divide-and-conquer. The compression takes place after the cluster head obtains all data that need to be compressed.
Without loss of generality, we assume there are N data entries available at a
cluster head when it performs compression, denoted as

DC_Compression()
The DC-compression aims at maximizing the size of each segment and reducing the total number of segments. However, DC-compression incurs a high computation cost when the movement trajectory within a cluster in nature has to be divided into multiple segments for compression, since its compression starts from the entire trajectory within a cluster.
In this section, we introduce another compression technique, called Stepwise compression, or
SW-compression in brief. Similar to DC-compression, the movement trajectory
selecting an initial segment and compressing it; adding the next new segment to the current segment that has been compressed, compressing the
combined segment, and obtaining new compression parameters and compression errors; terminating step 2 when either no new segment is left or the obtained compression error exceeds
ξ. The above process is repeated until the maximum number of segments is exhausted or there
is no segment left. Algorithm 3 depicts
the SW-compression technique.

SW_Compression()
Segmentation is critical for SW-compression. Similar to the discussion about DC-compression, a
straightforward approach for constructing segments in SW-compression is to divide
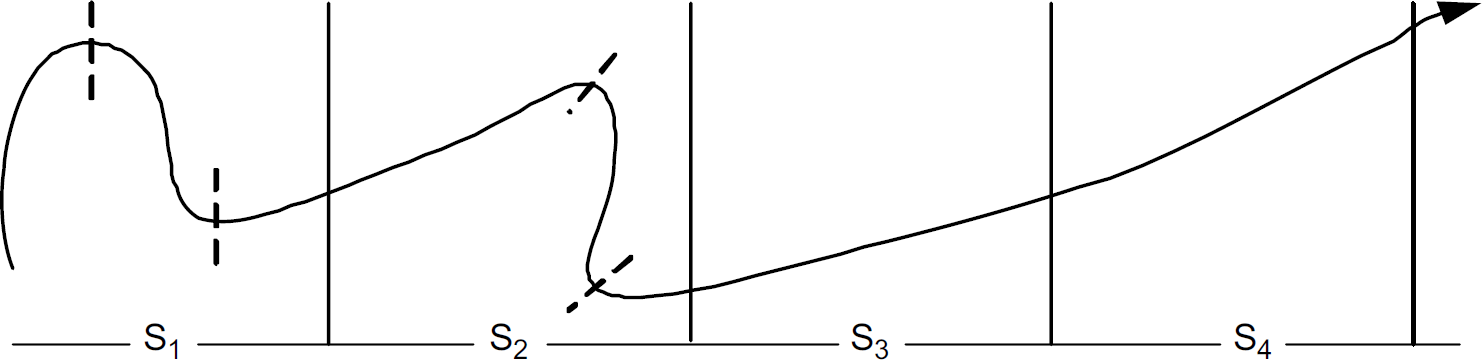
A simple segmentation approach is evenly dividing the trajectory into segments as shown in Fig. 2 . Apparently this approach has deficiencies. In Fig. 2, the trajectory shown by the solid arrow is evenly divided into four segments i.e., S1, S2, S3, S4, with the same length. However, we observe that S1 and S2 contain one or more turning points (i.e., the intersection between the trajectory and the dashed line). Thus, it is difficult to compress them by one simple function without hurting the compression accuracy. On the contrary, S3 and S4, which are smooth and have a similar pattern, can be combined into one segment for compression. In this work, we consider a different segmentation approach that takes into consideration the trajectory pattern and aims at minimizing both communication and computation cost.
Trajectory segmentation.
A good trajectory segmentation scheme should satisfy the following two requirements: the formed segments have the right length. More specifically, the segment should be short enough,
such that it can be compressed by a compression function with ∊ ξ. Meanwhile,
in order to reduce both communication and computation overhead, a segment should not be too
short; trajectory segmentation should not incur excessive computation overhead. In the following, we
study a trajectory segmentation scheme that divides a given trajectory into segments in one scan of
given data. The focus is on forming segments with the right length, while being resilient to complex
movements.
Studying a movement trajectory, the turning points on both y-axis and x-axis are the main reason that a compression function fails to compress the trajectory accurately. Turning points, represented as the local maxima and local minima (together refereed as local extremum), are mainly caused by the dramatic changes in moving direction. Therefore, by examining the location points l1, l2,…,lN along the movement trajectory of a moving object, the cluster head can perform segmentation along t when local extremum on either x- or y-axis are identified. In the following, we present how a cluster head segments the movement trajectory based on local extremum by taking the local extremum on x-axis as example. Y-axis can be processed in the same manner.
The cluster head continuously obtains a sequence of location points along the object's
movement trajectory l1, l2,
l3,…. At the beginning, the cluster head initializes
lmax = lmin = l1, where
lmax = < tmax, xmax, ymax,
O> records the local maxima at x-axis and lmin =
<tmin, xmin, ymin, O> records the local
minima at x-axis. For a new arrival of li, if
xi > xmax, lmax =
li; otherwise if li < xmin,
lmin = 1i. With a small enough reporting duration, it is
unlikely that both lmax and lmin are to be
set as li. We denote
The above trajectory segmentation only requires one scan of all data to be compressed, to find out the local extremum for constructing segments. Each formed segment tolerates small deviations in object movements.
In this section, we analyze the performance of DTTC, paying special attention to the cluster size of the underlying cluster infrastructure. We argue that cluster size is an important parameter affecting the energy efficiency of DTTC, which is a critical performance metric for sensor network based applications.
The total communication cost incurred under normal operations of DTTC consists of
Given the above two communication costs, larger clusters increase the intra-cluster cost, which
likely dwarfs the savings in cluster-sink communication. Meanwhile, with smaller clusters, more
communication between cluster-sink is incurred, which, considering a large-scale network, could
result in high communication cost. Therefore, the cluster size is a key factor in optimizing the
performance of DTTC. Our analysis is based on the following assumptions: The object maintains its velocity for a period of time before any change For simplicity, we assume the object moves linearly The number of hops between two nodes is proportional to the geographical distance between them.
Specifically, we define the number of routing hops between two nodes as the ratio of the
geographical distance between these two nodes to the communication range R.
Figure 3(a) shows an example of data collection within a cluster, where the grey dashed arrow represents the moving trajectory of an object, and t0 to t4 denote five time stamps when the sensor nodes report their readings about the object trajectory to the cluster heads. The geographical distance between adjacent time stamps is a constant, denoted as u, as we assume the object moves linearly with relatively constant speed. u is calculated as product of |ti+1 – ti| and object's moving speed, where |ti+1 – ti| is the reporting duration. In this example, we assume a cluster is a circle centered at the cluster head with C as radius. All sensor nodes falling into this region report their readings to the cluster head upon detecting the object at the required time stamp. We draw an x-axis and a y-axis, which intersect at the point where the object enters the cluster, shown by grey solid arrows in Fig.3(a).

Performance analysis.
We first consider intra-cluster cost. As shown in Fig.3(b), the coordinates of the point where the object enters the cluster and of the cluster head are (0,0) and (C, 0), respectively. For simplicity, we assume a report is generated when the object enters the cluster (i.e., at time stamp t0). Giving a time stamp ti, which is i∗ u away from t0, the energy consumed to report to the cluster head is

where e represents the energy consumed by transmitting a unit of data for one
hop, Bdata denotes the size of a sensor reading packet generated by
sensor node, and θ is the angle formed by the object's trajectory and x-axis in Fig. 3 (b). The total number of packets generated
for reporting the object's locations within the cluster is

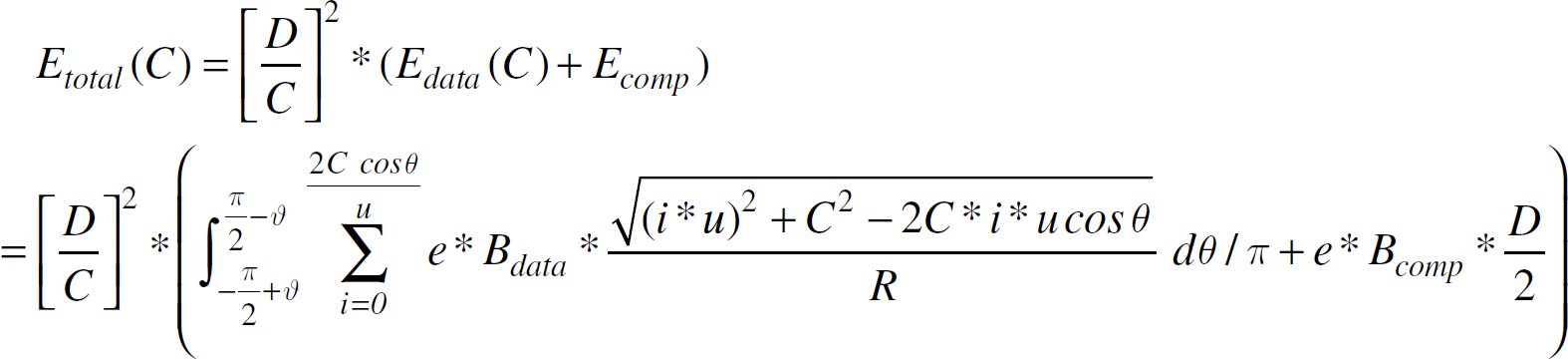
Giving the cluster radius C, the average intra-cluster cost, denoted by
Edata(C) is

where ϑ represents a very small angle such that
Now, we consider the average cluster-sink cost, giving cluster radius C.
Assuming a disk-shaped network region with radius D, the average distance between a
cluster head and the sink node, which locates at the center of the network, is
To minimize Etotal(C),

Figure 4 illustrates the optimal number
of clusters (i.e.,

The optimal number of clusters.
In this section, we study the impact of different choices in protocol design (including the number of clusters and error bound ξ) on the performance of DTTC. We also compare the performance of DC-compression and SW-compression techniques and examine DTTC's sensitivity to system and application parameters, such as the moving speed of objects and reporting the duration from sensor nodes.
Simulation Settings
We implement all schemes under comparison in MATLAB. We assume a sensor network is deployed in a 1000m × 1000m two-dimensional region. Without loss of generality, the network region is divided evenly into a number of clusters, and a cluster head is placed in the middle of each cluster. The transmission range of a sensor node is set to 40m [12], and the node density, i.e., the average number of neighbor nodes in the transmission area of a sensor node, is 20. The number of hops for transmitting a packet is approximated as the ratio of the routing distance to the transmission range of a sensor node (i.e., 40m).
We consider two kinds of trajectories, i.e., linear and nonlinear
movement trajectory. With linear movement trajectory, an object moves with a fixed moving
direction for a period of time before changing its direction. On the other hand, an object following
nonlinear trajectory keeps changing its moving direction. To simulate the linear movement
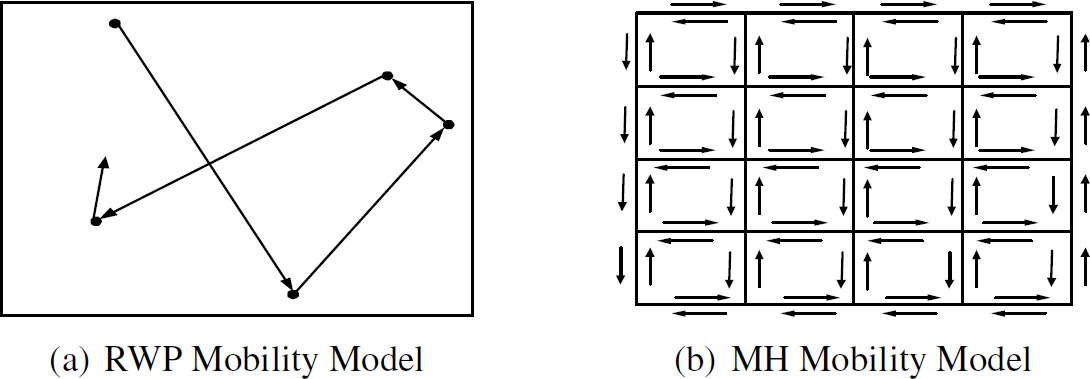
trajectory, we employ the following two mobility models: Random waypoint mobility model (RWP): RWP model has been widely used for modeling ad hoc movement
patterns. RWP (as shown in Fig. 5 (a)) runs
as follows: at every instant, an object randomly chooses a destination and moves towards it with a
constant velocity. Manhattan mobility model (MH): MH (as shown in Fig. 5 (b)) emulates the movement pattern of a moving object on streets defined by a map.
The map is composed of horizontal and vertical streets. Each street is bidirectional. We adopt MH
settings used by [2]: at the intersection
of streets, a moving object can turn left, turn right and go straight with a probability of 0.25,
0.25, and 0.5, respectively.
Linear movement trajectory.
The nonlinear movement trajectories are simulated by some famous mathematical curves. Specifically, we consider parabola curve generated by y = ax2 + bx + c, eight curve generated by x4 = a2(x2 − y2), cardioid curve generated by (x2 + y2 − 2ax)2 = 4a2(x2 + y2), and foliumd curves generated by x3 + y3 = 3axy. Figure 6 shows the movement trajectories defined by the above mathematical curves. All the curves are scaled so that their minimum bounding rectangles is 1000m × 1000m. We simulate the randomness in object movements by adding a bump randomly drawn from [50, 50] to the location points on the defined nonlinear movement trajectories 3 , such that the real movement trajectories are not as smooth as the ones shown by Fig. 6 . The threshold Bmax is set to 40m. By default, an object moves at a constant speed 10m/s, which however greatly facilitates predictions in DPR. We set the reporting duration, i.e., the period of time between two consecutive sensor readings, is 5 seconds by default. For the linear trajectory, the simulation lasts for 600 seconds. An object starts its movement from the lower-left corner of the simulated field. The simulation results are obtained by averaging the algorithm performance over 10 runs of randomly generated object movement traces. For nonlinear movements, the results are derived by averaging the performance over 10 runs of the same trajectory with randomly introduced bumps.

Nonlinear movement trajectory.
Figure 7 shows examples of RWP, parabola, and foliumd trajectory used in our experiments (shown by points) and the trajectory recovered from its compressed formate by DTTC (shown by lines). The RWP trajectory is smooth without bumps. DTTC segments the trajectory easily at the point where the moving object changes moving direction, and compress them either by linear and quadratic functions. For the parabola and foliumd trajectory with bumps, DTTC is able to overcome the randomness in the trajectory, and precisely and efficiently capture the object's movement pattern.

Real and compressed trajectory.
To examine the performance of DTTC in-depth, we compare DTTC against the dual-prediction reporting scheme (DPR) [28]. DPR, as a prediction-based tracking technique, employs an identical model at both sensor nodes and the sink node for predicting the future object movements, such that transmitting prediction packets from the sink node to sensor nodes is saved. Updated packets are sent to the sink node when sensor nodes find their predictions are wrong. According to the research results in [28], We adopt the EXP_AVG prediction model and set the size of a history packet and an update packet in DPR as 11 bytes. A compression packet in our proposal is 60 bytes. The default error bound ξ is 40m for both DTTC and DPR. The usage of an error bound in DTTC has been described in Section 3.3; for DPR, the sensor nodes consider the prediction correct, as long as the distance between the predicted and the actual object's location is less than the error bound. In the following experiments, a polynomial function with a degree of 3 is used as DTTC's compression function.
We study the performance of DTTC and DPR in terms of distance error, communication
cost, and computation cost. The distance error in DTTC is calculated as the average distance between the locations recovered
from the compression trajectory and the locations observed by the sensor nodes. In DPR, it
represents the average distance between the predicted and the actual locations of a moving object,
thus indicating the prediction accuracy and having an impact on the communication overhead of
transmitting update packets. The communication cost indicates the energy usage for communication in DTTC and DPR. The cost for
transmitting a packet is measured as the number of bytes in the packet × the number of hops
for transmission. The total communication cost of a studied algorithm is calculated as the sum of
the cost of transmitting all packets. The computation cost for DTTC is defined as the total number of compression operations (i.e.,
Subroutine Seg_Compression) needed for compressing the entire movement trajectory.
Figure 8 compares the distance error for DTTC's DC-compression technique, DTTC's SW-compression technique and the DPR algorithm with both linear and nonlinear movement trajectories. As DPR does not rely on cluster infrastructure, its performance remains constant with the varying number of clusters. Figure 8(a) shows that both DTTC and DPR have less distance error under the MH model than under the RWP model, as an object in the MH model has much less possible moving directions (i.e., maximum of three directions). In RWP, since a movement destination is randomly chosen, DPR experiences more difficulties in predicting the object's movement than in MH.

Distance error.
For clarity of presentation, we plot the distance error of DTTC and DPR with eight and parabola trajectory in Fig.8(b), and that with cardioid and foliumd trajectory in Fig.8(c), respectively. The DC-compression and the SW-compression techniques show similar distance errors due to the same error bound. Moreover, DTTC demonstrates a relatively stable compression accuracy to the varying cluster size. Therefore, the choice of the optimal number of clusters can be determined by only considering energy usage of DTTC, which simplifies the problem. Furthermore, as similar trends are observed from Fig.8(b) and Fig.8(c), the following experiments only present the performance with cardioid and foliumn curves for nonlinear movement trajectories.

Communication cost.
Figure 9 depicts the communication cost for DC-compression and DPR. As DC-compression and SW-compression are based on the exact same cluster infrastructure and have very close distance error as shown in Fig.8, we do not show the communication cost for the SW-compression. Due to the higher prediction accuracy, DPR under MH incurs less communication cost than under RWP. DTTC shows a very different trend in communication cost under RWP and MH. In RWP, when the number of clusters increases from 2 to 4, intra-cluster costs reduce without significantly increasing the cluster-sink cost. However, this saving is quickly overwhelmed by the continuously increasing number of clusters, as more compression packets are generated for more segments. On the contrary, MH benefits from smaller cluster sizes, as an object in MH changes its moving direction more frequently than in RWP, which leads to shorter trajectory segments in nature.
We observe from Fig.9(c) and Fig.9(d) that with nonlinear movement trajectories, DTTC achieves up to 62% savings in communication cost over DPR, more than the improvements achieved with linear movement trajectories. It is because in a nonlinear model, an object keeps changing the moving direction during its movement, which dramatically deteriorates the predication accuracy in DPR and increases the transmission of more updated packets. In addition, we observe that the communication cost of DTTC decreases as the number of clusters increases at the beginning, and increases after reaching the minimum. This is because the saving achieved in intra-cluster communication cost is gradually overtaken by the increasing cost of sending more compression packets, when more clusters with smaller size are formed within the network.
Figure 10 shows the computation cost of DC-compression and SW-compression techniques with linear and nonlinear trajectories. Generally, the SW-compression technique incurs more computation cost than DC-compression with the RWP model and with the nonlinear model, as DC-compression starts with applying a compression function to as many segments as possible, which reduces the number of compression operations when the moving direction of an object remains constant for a quite period of time or changes smoothly. MH shows an opposite case, where SW-compression incurs less computation cost, as the object changes moving direction frequently. Both techniques demonstrate increasing computation cost when more clusters are formed inside the network, except for the MH model which shows a reversed trend. With RWP, cardioid and foliumd movement trajectories, the increasing number of clusters divides the trajectory which can be naturally compressed by one cluster head with one compression function, into multiple segments, such that more compression is needed. However, the MH trajectory generally shows frequent changes in moving directions, thus increasing the number of clusters has a limited impact on DTTC's computation cost.
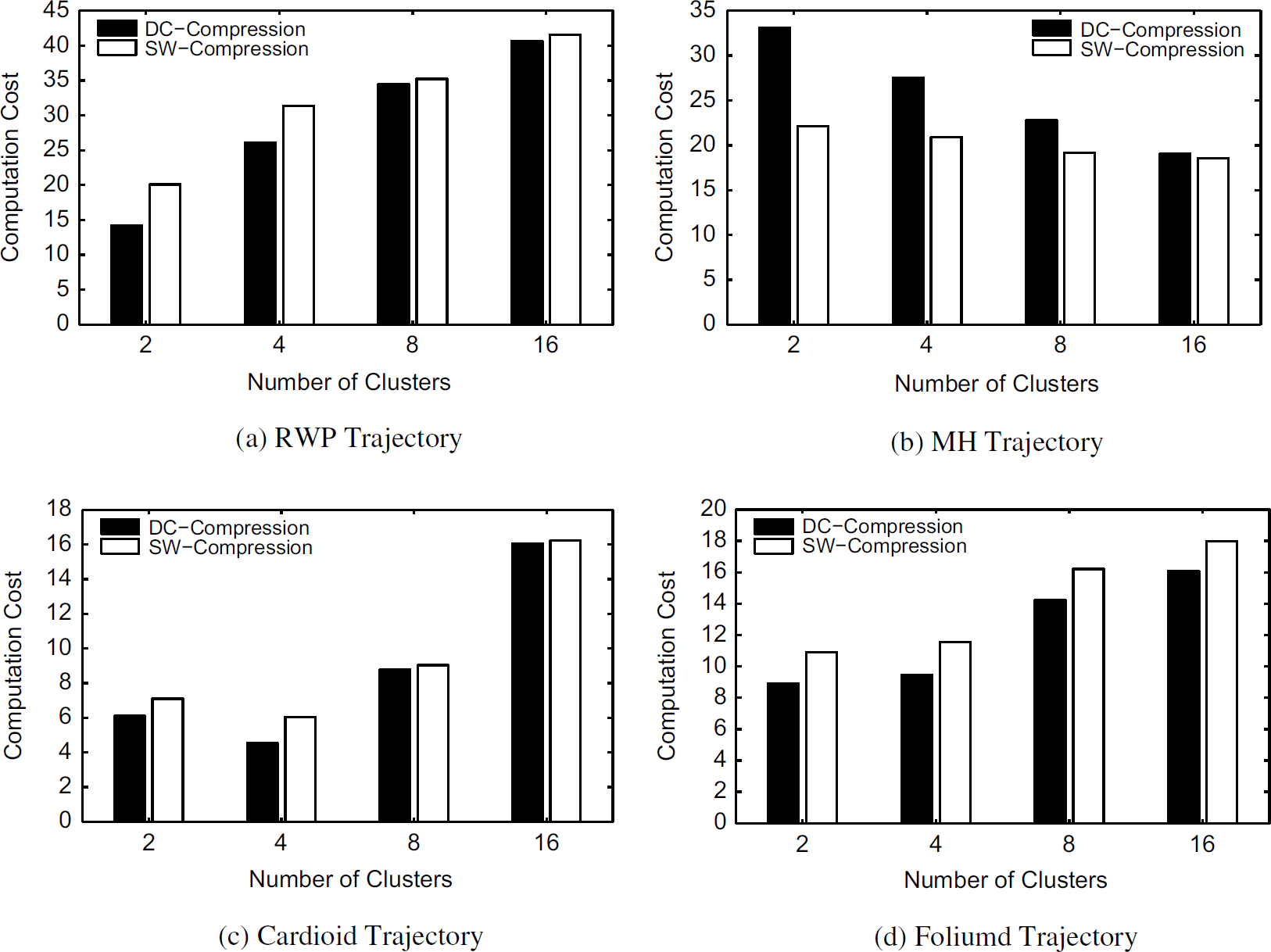
Computation cost.
In this section, we examine the impact of error bound ξ on the performance of DTTC and DPR algorithms by varying ξ from 10m to 90m. The number of clusters used by DTTC is set to 6. Larger error bound tolerates more errors in both compressions and predictions, which intuitively leads to less communication and computation cost.
Figure 11 depicts the performance of DC-compression and DPR with linear movement trajectory. We observe from Fig. 11 (a) that prediction accuracy in DPR significantly decreases when the error bound increases, as sensor nodes tolerate more derivations between their predictions and their readings. Meanwhile, the compression accuracy in DC-compression is less affected by the error bound, due to the intelligent segmentation in DTTC. With increasing tolerance to the prediction error, both schemes show decreasing communication cost in Fig. 11 (b) for MH and RWP. Figure 11(c) shows a very interesting trend in the computation cost of DC-compression and SW-compression techniques with varying error bound. Generally, DC-compression incurs more computations (i.e., Subroutine Seg_Compression) when the error bound increases, as the compression error falls into the error bound sooner. The SW-compression is less expensive in terms of computation than the DC-compression when ξ < 50m, as fewer segments can be combined to satisfy a small error bound.
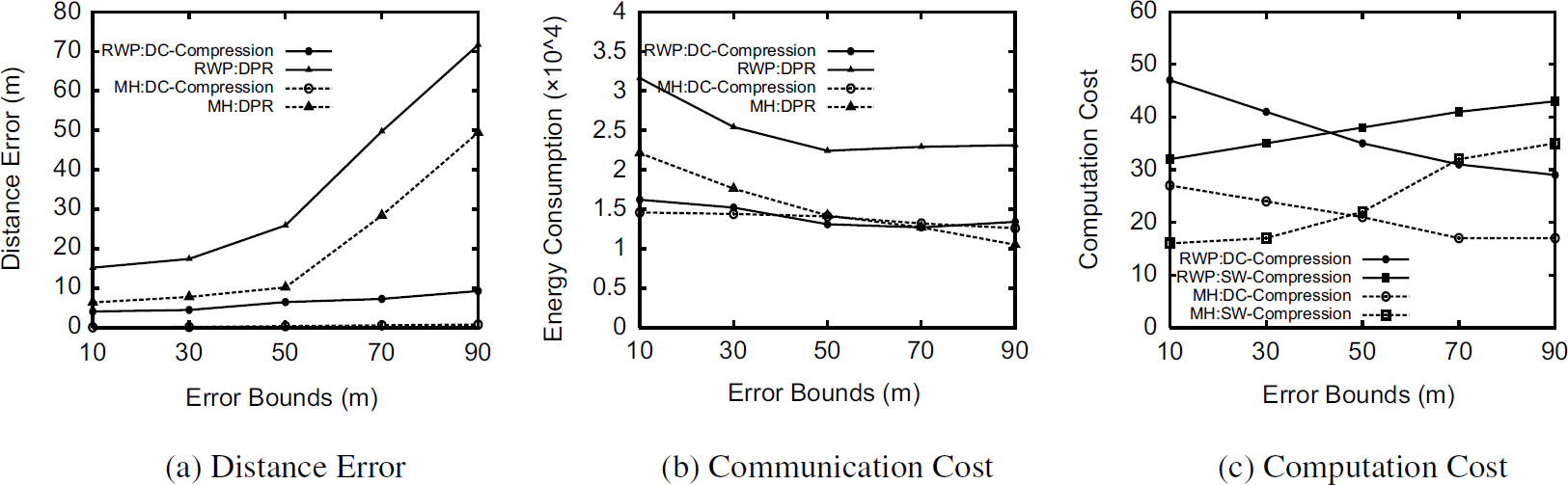
RWP and MH models.
The performance of DTTC and DPR with nonlinear trajectories (i.e., cardioid and foliumd curves), shown in Fig. 12, is similar to that with linear trajectories. Generally, DTTC and DPR both incur higher distance error with nonlinear trajectories than linear trajectory. However, as more tolerable to the compression error and prediction error, less communication costs are incurred for both schemes; DPR has a faster trend in communication reduction. We also notice that the computation cost of SW-compression increases over DC-compression very fast (e.g., error bound > 5m), while the computation cost of DC-compression decreases gradually with increasing error bound.

Cardioid and foliumd curves.
u, defined in Section 4, denotes the distance an object moves along during the period of time between two consecutive sensor reports. Intuitively, given the moving trajectory of an object, a larger u results in less sensor reports. However, this data reduction is at the cost of less accurate prediction accuracy in DPR, and compression accuracy in DTTC. u can be calculated as the product of constant moving speed and reporting duration. Moving speed indicates the moving property of an object, while the reporting duration is a parameter determined by the application. In the following, we study the impact of the above two parameters on the performance of DTTC and DPR, respectively.
We first examine the impact of moving speed on the performance of DTTC and DPR by varying the moving speed from from 4m/s to 20 m/s and fix the reporting duration as 5s. We observe from Fig. 13 (a) that the distance error of both DTTC and DPR increases when an object moves faster. For DPR, higher moving speed expands the possible moving range of an object, thus making predictions of the future movements of objects less accurate. Moreover, the faster an object moves, the more sensor nodes the object may pass through during the simulation period, which results in more historical packets and energy consumption. For DTTC, given a fixed reporting period, a cluster head receives less reports about the object's location from the nodes within its cluster, which deteriorates the compression accuracy. However, even though both schemes show increasing distance error with higher moving speed, they have a very different performance in communication cost shown in Fig. 13 (b). DPR shows a higher communication cost when the object moves faster, as prediction accuracy decreases. On the contrary, the communication cost of DTTC with foliumd trajectory gradually reduces with the increasing moving speed. This is because with the fixed length of the foliumd trajectory, less data reports from sensor nodes to the cluster heads are generated, which contributes to the communication reduction in DTTC schemes, but does not overcome the increasing communication of update packets in DPR.

Impact of moving speed.
Figure 14 shows the impact of reporting duration on the performance of DTTC and DPR by varying the duration from 2s to 10s with a fixed moving speed 10m/s. Intuitively, a longer reporting duration leads to a longer u, which results in less number of reports being generated by sensor nodes, but hurting the prediction and compression accuracy. Figure 14(a) verifies our intuition. The distance error of both DTTC and DPR increases when a longer reporting duration is used 4 Moreover, we notice the total number of data reports generated in DTTC and DPR decreases, which overcomes the increasing cost of transmitting more updates packets caused by wrong predictions in DPR.

Impact of reporting duration.
As a summary, DTTC incurs decreasing communication cost when u increases, which is caused either by the object's faster moving speed or a longer reporting duration required by the application. This communication reduction is achieved at the cost of increasing distance error. However, DPR shows different trends to these two factors. With faster moving speed, the performance of DPR worsens in both distance error and energy cost.
The existing object tracking techniques for wireless sensor networks are designed for real-time tracking. By empowering a sink node with the ability of predicting object movements, these techniques aim at minimizing the communication cost. However, considering the complex movement patterns that an object may follow and the communication overhead a prediction-based technique involves, it is extremely difficult for existing prediction models to reach a high prediction accuracy. By reexamining object tracking applications supported by wireless sensor networks, our study proposes a novel trajectory compression technique, called DTTC, for delay-tolerant tracking in sensor networks. To the best of our knowledge, this is the first trajectory compression technique proposed for delay-tolerant object tracking sensor networks. In DTTC, each cluster head compresses the movement trajectory of a moving object by a compression function. Rather than transmitting all sensor readings to the sink node, the cluster head communicates only the compression parameters, which provides the sink node expressive yet traceable models about object movements, but also drastically reduces the total amount of data communications required for tracking operations. Moreover, aiming at minimizing the total number of segments for compression, for a given compression function, we propose two compression techniques, i.e., DC-compression and SW-compression, which favor two different movement patterns. The proposed segmentation scheme is able to wisely divide the movement trajectory into segments, which helps both the DC-compression and SW-compression techniques to compress the trajectory more accurately at less computation cost. An extensive performance evaluation is conducted to study the performance of DTTC and a prediction-based tracking technique, DPR [28]. The experimental results show that DTTC exhibits a superior performance in terms of distance error, communication cost, and computation cost, and soundly outperforms DPR with various movement trajectories. In the case of objects that frequently and abruptly change their moving direction, DTTC with SW-compression yields better results. Both the communication and computation cost could further be reduced when more clusters are employed. On the other hand, for objects that gradually change their moving direction, DTTC with DC-compression outperforms DTTC with SW-compression and clusters with medium size helps to lower the computation and communication cost.
Footnotes
1
This paper focuses on exploring energy-efficient data collection schemes for object tracking. Therefore, we only examine the closely related work in the field of data dissemination. However, similar techniques also appear in other sensor network operations, including infrastructure construction and maintenance, query propagation and etc.
2
Within each cluster, a smaller-sized tree/cluster can be used for data aggregation [16, ![]() ], which further reduces the total amount of data
communication.
], which further reduces the total amount of data
communication.
3
Since MH does not allow movement randomness, to be comparable, we do not consider the bumps in RWP model.
4
To be consistent and comparable, we use the default reporting duration, i.e., 5s in calculating the distance error, even though the sensor nodes do not report their readings with this duration.
Acknowledgement
Wang-Chien Lee and Yingqi Xu were supported in part by National Science Foundation grants IIS-0328881 and CNS-0626709.