
Abstract
In this paper, a distributed approach to radio scene analysis is considered. A Wireless Sensor Network, composed by Software Defined and Cognitive terminals, is used to classify air interfaces present in the radio scene. Two modes, namely Frequency Hopping Code Division Multiple Access and Direct Sequence Code Division Multiple Access, are identified, employing a signal processing technique. Time Frequency analysis, and a distributed decision theory. Advantages given by distributed detection are used to improve the performance of a Mode Identification module. Results in terms of error probability are obtained by modelling the probability density function of considered features as Asymmetric Generalized and Generalized Gaussian functions.
Keywords
Introduction
In the last 5–10 years, the scientific community, under pressure from the military world (and not only the military world), is concentrating big and multidisciplinary efforts on the study of sensor networks (SN), particularly of wireless sensor networks (WSN). A SN is a group of nodes able to sense the external world and exchange the gathered information; if the medium of the communication flow is wireless, the network is called WSN. Thousands of applications can be mentioned for WSN, and four main possible fields of use can be identified: military, environmental, health, and domestic [1, 2].
The military field is the most demanding and because of this, the best performances can be found in these applications: force, equipment, and ammunition monitoring, battlefield surveillance, target identification and enemy spying, damages evaluation, nuclear, biological, and chemical (NBC) attack detection [3] are some of the possible uses.
In the environmental application, WSN are very useful because (usually) the variables to be monitored are spread in large areas which, many times, are not studied for their inaccessibility: in this case, the absence of infrastructure is overcome by the modularity of WSN allowing the user to cover the monitored area with high flexibility. Some examples can be found in [4–8].
The third application field is the medical world, where WSN are essentially used to monitor the health status of the patient. Particular interest is devoted to embedded sensors, directly inserted in the body, which compose a network with external nodes for a continuous control of the subject. Examples can be found in [9] and [10].
The last but not least important field is the building automation. In this case, the aim is to join heterogeneous systems present in a building to create a fully-interconnected network of devices. Many applications of this kind can be found in smart spaces, domotic, and video surveillance [11, 12].
In many of the previous mentioned applications and architectures, a common part is present and fundamental for each target: the availability to exchange information by using wireless links. The advantage consists in avoiding a fixed infrastructure, but the drawback is that a radio link is usually time-varying and very noisy. The first solution is to build a network with performances, pre-defined in respect to the worst case, but this means an inefficient use of resources, such as the spectrum. Thus, nowadays the challenge is to project networks and devices able to adapt themselves to the external environment, and in particular to the radio resources (spectrum, standard, mode, etc); this paradigm is reflected by the so-called Software Defined and Cognitive Radio approach [13, 14, 15]. The Software Defined and Cognitive Radio brings to the definition a completely adaptable physical layer, where the communication features can change in relation to the conditions of the wireless channel, to the traffic status, and to the users' requirements.
The Problem of Radio Scene Analysis
In order to reach such fully-reconfigurable devices and networks, many issues are still open, such as powerful algorithms and procedures to understand the external “radio-scene” [15]; among them, one of the main important topics is Mode Identification and Spectrum Monitoring (MISM) [16, 17, 18]. MISM is the process through which a base station or a terminal understands the radio-scene by classifying the available transmission modes and the spectrum holes in the channel. A transmission mode (also called air interfaces [13]) can be defined as the specification of the radio transmission between a transmitter and a receiver. It defines the frequencies or the bandwidth of the radio channels, and the encoding methods used such as FH-CDMA, DS-CDMA, TDMA, MC-CDMA, etc. [13]. By using MISM, a cognitive terminal should be able to recognize the spectrum holes and the available modes in order to improve the efficiency of spectrum use and of radio resources in general. To implement the framework of a MISM module, this work proposes the use of a Wireless Sensor Network composed by Software Defined and Cognitive Radio devices.
Solutions for Radio Scene Analysis
In the state of the art, some proposals can be found to implement radio sensing modules. The simpler and older solution is the use of the so-called radiometer [20]. The idea is to scan spectrum by extracting energy in each sub-band identifying the presence of signals. The advantage of this approach is the very low computational load, but the drawback is that, when signals temporally overlap on the same band, energy detection can be insufficient to discriminate the mode. Moreover, the pieces of information provided by energy detection cannot be enough to take further steps. For example, in the direction of modulation recognition. Another work [16] presents the use of a radial basis function (RBF) neural network for a power spectral density estimation to identify the communication standard. No superposition of signals is considered, and different radio frequency stages are employed. In [18] a further integrated solution is proposed by means of a two step sensing module: first an energy detection to identify a void or occupied carrier; and a following Radio Access Technologies (air interface) classification to detect GSM and UMTS signals. Also in this approach, no superposition of modes is taken into account and, moreover, the solution is studied for a stand alone sensor. The first procedure for sensing and identification of overlapping modes is presented in [17], where a time frequency analysis is combined with neural network to classify spread spectrum interfaces, such as frequency hopping and direct sequence. The use of time frequency methods allows the study in the time and the frequency plane of spectrum in order to evaluate the so-called white spaces (or spectrum holes) also in time domain and, moreover, to discriminate two air interfaces using the same band. Approaches for spectrum sensing, based on time frequency analysis, have been subsequently proposed also in [15] with a complete and exhaustive analysis of cognitive radios; in that article, the author proposes a two step-procedure composed by interference temperature estimation and spectrum holes detection. Another recent work is [21], which shows an air interface classification (that is mode identification), based on cyclostationarity detection. The feature of cyclostationarity is used like a signature of superimposed modes: each signal provides this property with different frequencies and for different values of time lag and, by using binary hypothesis testing, is classified. Another related work, and probably one of the biggest efforts in the field of spectrum sensing is given by the Next Generation (XG) Program, funded by DARPA, whose goals are the improvement in assured military communications through the dynamic assignment of allocated spectrum. In the Request for Comments (RFC) section of the XG Program [22], a key function is given by sensing module, which has to sample the channel in order to determine occupancy. The criteria for declaring a channel occupied is not specified, but it is reported that the basic notion is to determine if there is a signal (frequencies usage) and if so, what the characteristics of the signal are (air interfaces classification).
This article starts with the vision of cognitive wireless sensors (Section 4), whereas in Section 5 the entire proposed framework is described. In Sections 6 and 7 procedures are explained with a deep analysis of distributed detection (Subsect. 7.2). Results and conclusions are shown in Sections 8 and 9.
Cognitive Wireless Sensors Network Vision
The vision proposed in this work joins two different research fields: Sensor Network and Cognitive Radios. The problem of radio scene analysis, typical of Software Defined and Cognitive Radios [15, 18, 23], is tackled starting from the solution proposed in [17] to arrive at proposing the use of Distributed Detection, typical of Sensor Network [24–26], by considering cognitive terminal as cognitive sensor node. Through this approach, advantages of cooperative strategies and sensor networks are provided. A better performance in terms of correct detection, which cannot be reached, for stand alone sensor, with its own procedure will be shown in Section 8. Each device/sensor works together with other terminals to obtain data about wireless channel, more detailed and correct than in the stand alone scenario. To explain how this objective is reached, examples of two air interfaces. Direct Sequence Code Division Multiple Access (DS-CDMA) and Frequency Hopping Code Division Multiple Access (FH-CDMA) are classified by using distributed cooperative terminals. Two cases of study are considered: IEEE WLAN 802.11b and Bluetooth. The choice of these two standards stems from three factors: first, they are based on the chosen modes, DS-CDMA and FH-CDMA, second, they use the same bandwidth (Industrial Scientific Medical (ISM) Band) allowing the design of a unique RF conversion stage, as ideally required for an SDR platform [13]: third, the growing interest in them on the market for their wireless connectivity, especially for communications in coexistent environment.
General Framework and Proposed Method
The approach is a generalization of the one proposed in [17] to a multiple cooperative scenario. A number
N of cognitive sensors (CS) CSi with i
= 1,2, …, N, move in an indoor environment to observe the
“external world” by analyzing spectrum and searching for radio sources to be localized
and identified. Each CSi is able to extract pieces of information from
the external world, analyze them, decide, and act in relation to a pre-defined cognitive cycle
[14]. More precisely, each SS captures
the observation Oi (t), processes it and extracts from
it a vector of features
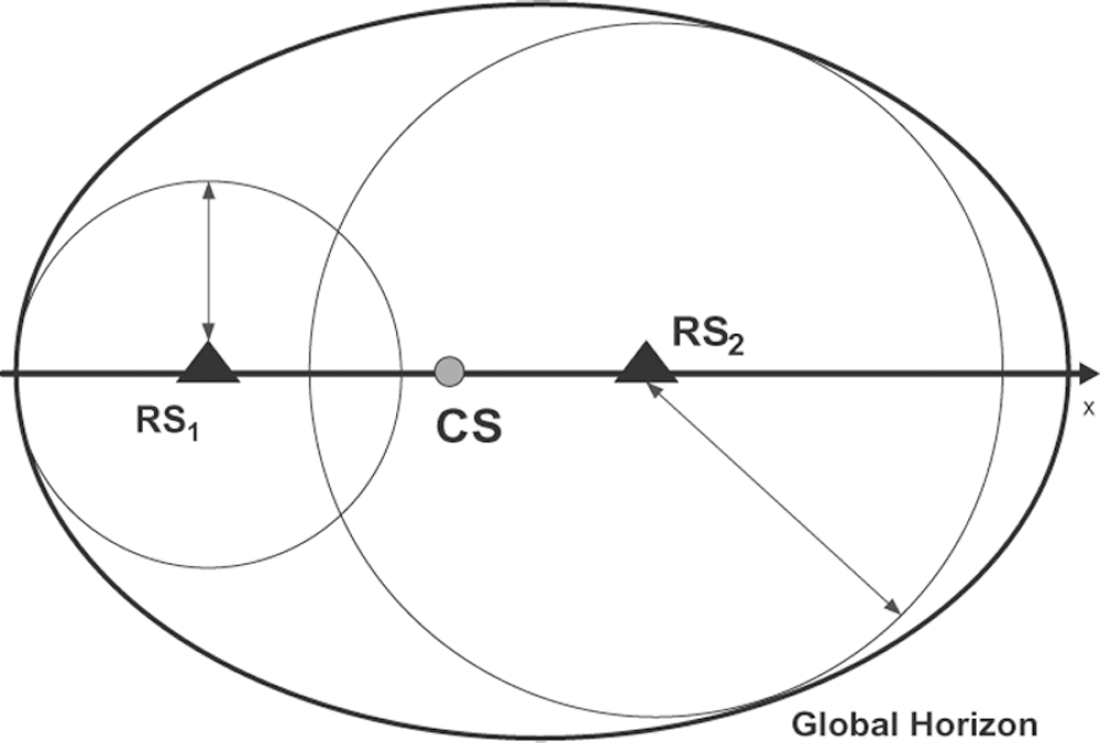
The MISM and location problem is defined as follows: let us consider (Fig. 1) that a set of CSs, {CS} =
{CSi: i = 1, …, N} is
present within the horizon of a number of radio sources RSk,
k = 1, …, K, where the horizon is the surface that
contains all the areas of coverage of RS
k
. Let us associate with each
RSk a position

The general framework.
When dim{CS} = 1, a stand alone scenario is fixed, i.e.,
a single smart sensor is considered. If
dim(
Example of stand alone seenario.
The two cognitive sensors, CS1 and CS2,
are composed of different blocks (Fig. 3),
which can be grouped in Sensing Modules and in Analysis Modules.
The sensing procedures are performed by directly sampling the received signal and representing it in
a bilinear space, the Time Frequency (TF) plane (see Section 6.1); once TF matrixes,
W1 and W2 are obtained, the analysis
procedures start: from Wi, i = 1,2, the features vector
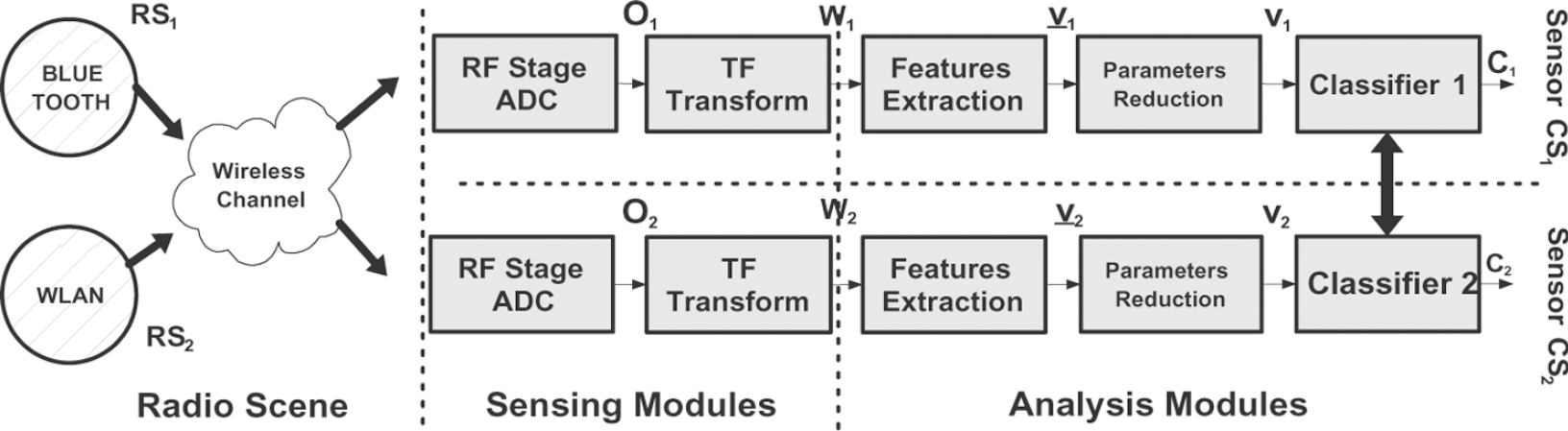
Logical architecture of two cooperative sensors.
Time Frequency Analysis
The observation Oi(t) after Radio Frequency (RF)
stage and A/D conversion is processed by a TF block. The bilinear nature of the TF transforms
provides a methodology to process time-varying and superimposed signals as the ones considered in
this work. As TF distribution, the Wigner-Ville transform has been chosen [27]. This transform is the most used in the state of the art,
and it has low computational complexity, a good feature for real-time usage. The Wigner-Ville
distribution is given by:

where the superscript ∗ denotes the complex conjugate, and integral ranges from −∞ to +∞ and y(t) constitute the sampled version of the received signal. It is band-limited, and contains one of the two superimposed modes (WLAN or Bluetooth), or both.
Features Extraction and Reduction
From Wigner-Ville transform, it is possible to extract TF features of the received signal
observed on a time window T. The same two features, used in [17] with one sensor, are considered here: Feature 1 : standard deviation of the instantaneous frequency. Feature 2: maximum time duration of signal.
To obtain the first feature from a given TF distribution, the first conditional moment is
computed as:

where P(t) is the time distribution (time marginal), and the
integral ranges go from +∞ to −∞. In our case,
W(t,w) is the Wigner-Ville distribution of the received signal.
< w >
t
is the average of frequency at a
particular time t and it is considered as the instantaneous frequency
w
i
[27]. The standard deviation of
w
i
is:

where w
i
is the mean value of
w
i
computed on the time window T. From
Fig. 4 you can see that it is reasonable to
obtain a low value of std(wi) when the first conditional moment is quite
constant as in the case of DS (IEEE 802.11b), while it assumes high values in the case of FH
(Bluetooth). The second feature is obtained on the basis of the following considerations: in the
case of DS, frequency components are continuous in time for a duration that depends on the length of
the time observation window T used to compute the distribution. Instead, for FH
signal, a discontinuity in time can be observed due to the presence of different frequency hops.
Therefore, it is possible to obtain an empirical discriminating feature based on the time duration
of the signal. To obtain such data, the following operations are performed: From the chosen transform, a binary TF matrix
Wbin(t,w) is obtained “binarizing”
W(t,w) through a threshold to eliminate noise. The values of this
matrix represent presence (element equals 1) or absence (element equals 0) of a signal at a given
time t and at a given frequency f. The threshold has been chosen in an empirical way. After a trial and test procedure, its value
has been chosen as the mean value of the TF matrix. Once Wbin(t,w) has been obtained, the elements of
each row, i.e., for each frequency, are summed up obtaining T(w),
standing for the length in time of the component in relation to frequency.

Instantaneous frequency for the two signals, WLAN (a) and Bluetooth (b).
The feature used for the classification has been chosen as the maximum value
TM in such set, namely:

where

At the end of the feature computation, a vector

To simplify the problem decreasing the dimension of features space, the Karhunen-Loeve (K-L)
method [28] has been performed. It
computes a linear transformation, identified by the matrix A[n
× m], in order to reduce the dimension of features space from
n dimension to m, with m >
n. Once a new feature linear combination of the ones proposed in Equations (3) and (4) is obtained from K-L,
simpler probability density functions (pdf) can be computed. In the case of WLAN,
Bluetooth, and Noise class, the pdf can be expressed as a Asymmetric Generalized
Gaussian (AGG) [29] with the form
expressed in (7).

where
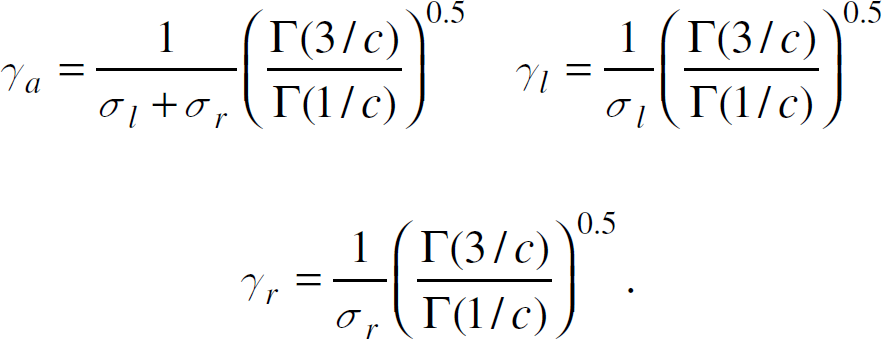
In case of WLAN and Bluetooth signal, the pdf can be modelled as a Generalized
Gaussian (66) distribution [29] whose
expression is obtained from (7), setting the equality between the right and left variance.

where
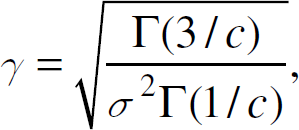
where for both distribution, (7) and (8), Γ(x) is the gamma function and
the parameters are: σ2 the variance,
σ2
r
the right variance,
σ2
l
the let variance, mx
the mean value. β2 the kurtosis, and:

Once pdf of feature are modelled, the detection process can be carried out. In the following Subsection the steps to reach distributed classification modules are explained.
It is worth mentioning another characteristic features: as it can be noticed in Fig. 5a, when one sensor
Si is at rest in a given position
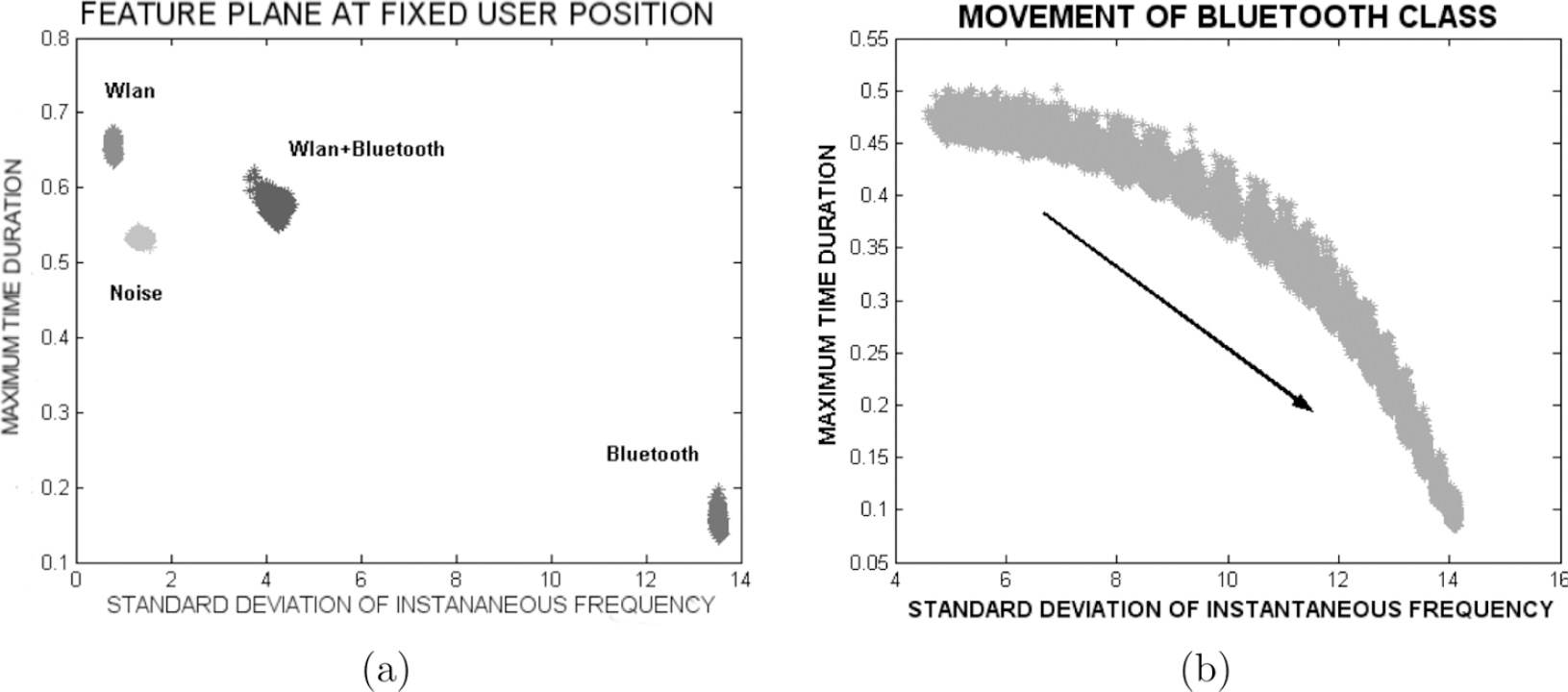
Feature plane for the four class at fixed user position (a) and for the bluetooth class during the movement of one sensor (b).
As reported in Section 5, in
addition to an advanced signal processing technique, i.e., the Time-Frequency analysis (Sect. 6.1),
to improve the performances of the
Different strategies can be designed to implement a cooperative behavior of Cognitive Sensors. In the following, two possible strategies are explained, pointing out the advantages and disadvantages of each one.
A first possible way of cooperation is to provide each sensor with multiple samples of the
features vector
As
Another possibility is that each element of the set of sensors shares the decision model with all the others in an a-priori way. Let us assume that each sensor knows its decision behavior, i.e., the mapping function Ci (t): this a-priori knowledge is shared in an off-line phase, i.e., no detector is immersed in the environment and no one is observing the radio scene. The exchanged information requires a significantly lower bandwidth than the previous cooperative strategy, and no signal interferes with the present radio scene. As the feature vector is a function of the position of the sensor, the classification behavior depends on the position of the node: the exchanged information can hence be coded as a probabilistic distribution of the features in the space, let us call it “features map.” This second case finds a theoretical framework in the distributed Bayesian detection by Varshney [24]. This study foresees the application of this approach with some changes to the considered scenario.
To study and implement the detection problem, it still remains to be defined which values the
classification Ci (t) can assume; starting from the
general framework described in Section
5, given two possible modes M1 and M2
and two radio sources, RS1 and RS2, the
situations to be classified are four, and in particular: absence of signal, when all sources (RS1 and
RS2) are switched off and only environmental Noise (Noise class) can be
present; presence of WLAN signal (WLAN class), RS1 is switched on, and
RS2 is switched off; presence of Bluetooth signal (Bluetooth (BT) class), RS1 is switched
off, and RS2 is switched on; presence of WLAN and Bluetooth signals (WLAN and Bluetooth class),
RS1, and RS2 are switched on.
Thus, by using the classification function Ci(t) each sensor CSi has to extract one of the four classes from C space, composed as follows: C = {{Noise, Noise},{Noise, WLAN}, {BT, Noise}, {BT, WLAN}}, where the first component of each class is the status of RS1 and the second one of RS2, and Noise means the corresponding source is switched off, and only the environmental noise is present. To simplify the classification process, it is possible to reduce the problem to a binary classification test. In fact, given the position of each detector, it is possible to classify the air interface by solving a set of binary problems. The distribution of the probability density functions of the features on the K-L axis shows that only two classes are partially overlapped, and they can generate ambiguities for each subproblem.
Hence, by studying pdfs' positions in feature space after the K-L reduction. It is possible to build two binary trees. In particular, in Fig. 6 histograms and relative pdfs are plotted together showing the first configuration, which generates the first binary tree, shown in Fig. 8. Whereas, in Fig. 7, the second situation is represented, and the relative tree is in Fig. 9. It is worth mentioning (as already stated) that the movement of the class is given by the sensor's movement and, moreover, that the Bluetooth class pdf is not plotted in Figs. 6 and 7, because it is very far (in K-L axis) from the pdfs of other classes: last consideration is reported in binary trees, where the Bluetooth class is the first one, which can be classified at the first decision level.

PDFs and Histograms of classes in the first configuration.

PDFs and Histograms of classes in the second configuration.
Let us then consider a binary phenomena, i.e., two possible hypotheses are present.
H0 and H1, in association with the
a-prior probabilities, P0 and
P1, which represent a possible couple of the previously described
classes. Because y1 and y2 are the
observations relative to the two sensors, taken at the correspondent distance

The local classification Ci is based on the local observation
yi, at a given position

where the dependance from the distance X =
{

The first binary decision tree used by each sensor.

The second binary decision tree used by each sensor.

Parallel decision performed by two sensors of a binary phenomenon.
Because the local classifications C1 and
C2 are independent and based respectively on the local observation
y1 and y2, and on the positions of the
sensors

Explicitly summing over C1, by considering that:


It's now possible to derive a classification rule for sensor 1 [24]:
Expanding the sum over k, the following formula can be obtained [24]:

Assuming the cost of sensor 1, making an error when H0 is present, is
more than the cost of classifying correctly regardless of the classification of sensor 2, i.e.,
C0j0 < C1j0, and by
considering that:

(15) can be expressed
as a likelihood ratio test [24]:


The previous equation
(17) shows that the right-hand side is a function not only of the observation for sensor 1,
i.e., y1, but it is possible to note that it is a function of
C2, i.e., the classification rule for sensor 2 also and this dependence
appears under the form of p(C2|y2,
Under the hypothesis of the conditional independence of y1 and
y2, i.e., when

the right-hand side of (17) can be reduced to a threshold given by [24]:

Noting that

it's possible to expand (20) in order to show explicitly that
t1 is a function of p(C2 =
0|y2,
The proposed general definition and optimization of the whole system involves the existence of two coupled thresholds even if there is no communication link between the two detectors; but for the setup considered in the present paper, an offline exchange of information consisting in p(Ci = 0|Hj, xi) where i = 1,2 and; j = 0,1 is performed (See Fig. 11).

Structure of a distributed detection system.
Let us now consider a special assignment of the costs as follows [24], where the cost value doesn't depend on which
sensor makes the error:
The resulting threshold for sensor 1 becomes [24]:

A similar expression can be used to compute the threshold for sensor 2. These obtained thresholds are, in general, different from the ones computed if each sensor was considered independently.
Given the position of the sensor, it's possible to apply the binary tree shown in Figs. 8 and 9, transforming the M-ary classification problem into a binary one.
For each likelihood function, it is possible to consider two different cases, i.e., both
p(yi | Hj,

A similar expression can be obtained even in the second case, but the right side and the left side of the asymmetric gaussian have to be treated separately, because a different variance is involved for each side [29].
In the off-line phase, after computing the thresholds t1 and t2, it's possible to define an error probability conditioned to each class (denoting with i = {1,2} the sensor, and with k = {0,1,2,3} the class)
if t
i
> mk:


In the following paragraph the simulation environment, based on previously described assumptions, the theoretical error probability for the moving sensor CSi, and a comparison with a stand alone case are shown.
The general scenario explained in Section
5 is implemented by using Matlab/Simulink. In particular, two cognitive sensors,
CS1 and CS2, are used, as shown in Fig. 12, moving around a room of 15 m ×
15 m. The radio scene to be detected can be composed by either one of two possible modes,
M1 or M2 (Direct Sequence Code Division
Multiple Access (DS-CDMA) or Frequency Hopping Code Division Multiple Access (FH-CDMA)), or both, or
none of them. The two modes are implemented, taking into account all parameters defined in the
standards [30,31], except for protocols higher than the physical layer. The
radio channel is modelled as indoor multipath with AWGN. Multipath model is Rice fading with delay
spread of 60ns, and root mean square (rms) delay spread of 30ns [32]. A path loss term has been inserted: it follows the model
proposed in [33]. This is composed of
two parts: for distances lower than 8m, the path loss Lp has a value
dependent on frequency f and on the distance d from the source;
for distances larger than 8m, Lp is only a function of
d. The attenuation is obtained by:


Considered indoor scenario.
The received signals, corrupted by AWGN and multipath and attenuated as reported above, are then
translated in IF at 30 MHz with a sample rate of 120 Msample/s to satisfy the Nyquist limit. Then
they are computed by TF block: the Wigner-Ville distribution uses blocks with N
= 512 samples, obtained through a time window T large enough to contain 10
frequency hops. The time hopping is 625 μs. The extraction module stores 10
TF matrices, and it calculates the features as expressed in Section 7.1. Then the features are reduced with K-L method
(Section 7.1), and their
pdfs are modelled as AGG and GG. Due to the relation between the feature vector

Parameters of feature (after KL reduction) for bluetooth class in relation to user's distance from WLAN source. Variation (a), mean value (b).
To have a clear idea of the improvement of performances given by the proposed distributed system, in the following figures error probabilities, both for cooperative and stand alone scenarios, are shown.
In Fig. 14, error probabilities are compared for the couple WLAN+Bluetooth and Noise, computed in case of one sensor at rest at 8.5m from the WLAN source, and the other one moving from 2m up to 12m on the line of sight between the two access points: the cost k of the double error is taken equal to 10. Two error probabilities are shown in the figure: one represents the probability of classifying WLAN+Bluetooth instead of Noise when all sources are switched off, and the other one represents the probability of deciding the presence of only Noise while WLAN + Bluetooth is present. In both cases, the error probability increases, reaching a peak at about 8 m from the WLAN source; this fact is due to an overlap of the two cases that generates ambiguities in the decision process. In Fig. 15, it is possible to see the error probability for the classes WLAN + Bluetooth and Noise for the stand alone scenario. It is possible to see a worst performance than in the cooperative scenario, where, for instance, the value of 10−10 is maintained within a distance of 7m, while, in this case, it is held within 6.5m. Moreover, the overall behavior is characterized by a higher Error Probability than the one obtained with distributed detectors.

Error probability of WLAN+Bluetooth and Noise classes for the cooperative scenario.

Error probability of WLAN+Bluetooth and Noise classes for the stand alone scenario.
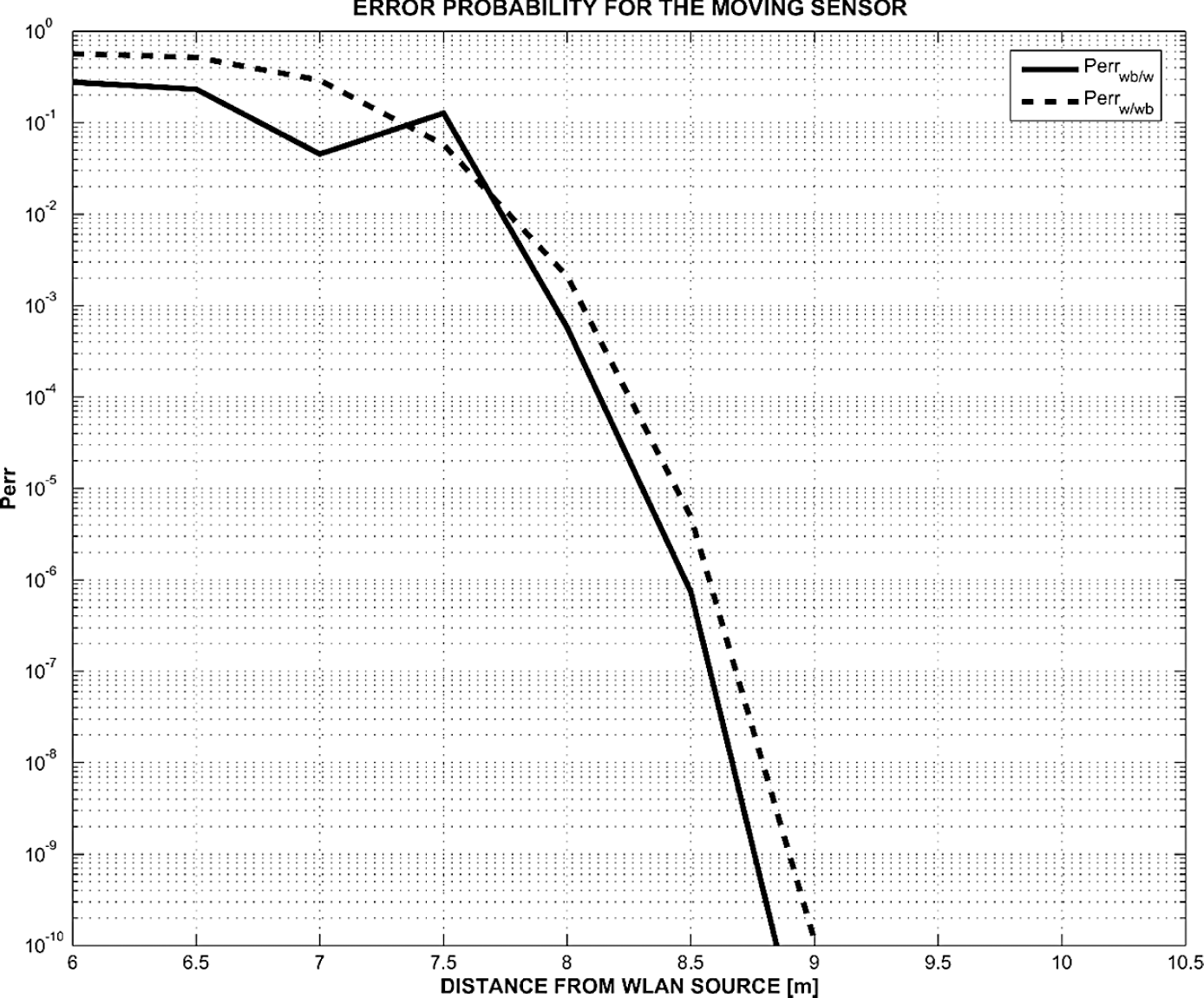
In Fig. 16, the error probabilities computed for the couple WLAN – Bluetooth and WLAN for the following scenario are presented: one detector fixed at 3.5m from the WLAN 802.11b source, and the other one moved from 2m up to 12m on the line of sight between the two access points; the cost of double error, even in this case, is taken equal to 10. For both cases (identifying WLAN when WLAN + Bluetooth is present and viceversa), the maximum ambiguity has been obtained for distances close to the WLAN source, where the classes are strongly overlapped. Also in this case the system presents good performances, and the closed form of the error probability, (25) and (26), allows an objective evaluation, biased by the fitting error and by K-L reduction, of the proposed algorithm. The improvement of cooperative case with respect to stand alone scenario is clear as it can be noticed in Figs. 16 and 17.

Error probability of WLAN and WLAN+Bluetooth and Noise classes for the cooperative scenario.
Error probability of WLAN and WLAN + Bluetooth classes for the stand alone scenario.
The paper deals with a distributed decision approach to solve the problem of Mode Identification in the context of Cognitive Wireless Sensor Networks. Two air interfaces have been considered to be classified, namely Frequency Hopping Code Division Multiple Access and Direct Sequence Code Division Multiple Access. A binary and distributed likelihood test has been computed obtaining a closed form for error probability in case of Generalized and Asymmetric Generalized Gaussian probability density function. Shown results demonstrate good performance of proposed approach. Ongoing research is centered on the resolution of multiple hypothesis distributed decision test, taking into account new air interfaces such as multi-carrier techniques, and new methodologies for a joint estimation of position and modes.