
Abstract
A new concept using flexible tether-net system to capture space debris is presented in this paper. With a mass point assumption the tether-net system dynamic model is established in orbital frame by applying Lagrange Equations. In order to investigate the net in-plane trajectories during after cast, the non-control R-bar and V-bar captures are simulated with ignoring the out-of-plane libration, the effect of in-plane libration on the trajectories of the capture net is demonstrated by simulation results. With an effort to damp the in-plane libration, the control scheme based on tether tension is investigated firstly, after that an integrated control scheme is proposed by introduced the thrusters into the system, the nonlinear close-loop dynamics is linearised by feedforward strategy, the simulation results show that feedforward controllor is effective for in-plane libration damping and enable the capture net to track an expected trajectory.
Introduction
Space debris problems are attracting much attention in recent years because of their increasing threat to the operational space assets and astronauts. Based on the statistical result of debris population, the current large space debris is mainly composed of retired or malfunction satellites, these uncontrollable satellites are even more dangerous due to their unpredictable explosion induced by their rechargeable batteries and propulsion tanks [1], [2]. Moreover since the altitude of GEO orbit is far beyond the outer residuals of the earth atmosphere, the debris problem in GEO orbit is even more serious because of the long-term debris accumulation [3], [4]. In order to re-orbit these uncontrollable targets and recovery the orbital environment, many countries proposed space robotic systems to perform space capture and tug missions. These proposed robotic systems employ different capture devices to conduct the capture task, nearly all of these capture devices are rigid mechanisms, such as manipulator, latch instruments and so on. Although rigid mechanisms have been tested in several space capture missions [5], [6], the previous experiences are similarly based on cooperative target captures, in which the targets are preset with simple dynamic parameters, or installed with special handle suitable for capture actuators. Even with the above facilities, several challenges still can not be avoided during the capture operation. Firstly, there is a severe dynamics coupling between the rigid capture mechanism and the free flying platform, the motion of the actuator will pose a disturbance to the system's position and attitude, which requires high control precision during the capture manipulation. Secondly, in case of the non-cooperative target, the function of rigid capture mechanisms will be limited by the target configuration and dynamic status, even impossible if the target is in an uncontrollable tumbling state. The effective capture range of rigid capture mechanisms is also a big problem that should be considered, thus an approaching manoeuvre is required to bring the system closer to the target, which inevitably leads to a high collision risk between the robotic system and target.
By contrast with rigid capture mechanisms, using flexible tether-net system to perform orbital capture is more preferable because of several advantages: the most patent advantage is that the large flexible net converts point-to-point capture into surface-to-point capture, which effectively reduces the requirement on capture precision. The characteristics of the tether-net system also enable the capture net to be used for in-cooperative target, whereas the function of rigid mechanism capture actuators is greatly limited by the configuration and dynamical status of the in-cooperative target in this case. Compared with other capture actuators the dynamical coupling between capture net and platform also has a simple format via the connecting tether. Another patent advantage of tether-net system is its large capture distance and therefore the closing manoeuvre is unnecessary and the collisions between the robot system and target can be avoided effectively. Further, because of its lightweight and small dimensions, the tether-net element can be miniaturized and the robotic system can be multi-installed with capture nets for multiple tasks.
Although the tether-net system has many exciting advantages, the in-plane and out-of-plane librations of the system are coupling with longitudinal libration, therefore an attitude libration will be resulted in by the tether deployment velocity when the net is cast, which will lead to capture deflections if the capture net is expected to follow straight line trajectory without control. In this paper, in order to investigate net trajectories characteristics under the effect of the attitude librations, the system attitude dynamics in orbital coordinate is established mathematically based on Lagrange Equations first, after that the variations of tether-net shape for R-bar and V-bar capture are investigated by simulations. The R-bar and V-bar simulation results show that the in-plane librations will change significantly the initial cast direction of the capture net. One solution to compensate the capture deflection is damping the in-plane libration by control, the direct effort is to control the net motion by tether tension. The feasibility of a control algorithm uniquely based on tether tension is considered first, but this algorithm is proved ineffective, after that an integration control algorithm based on tether tension and thrusters is presented an a series of simulations are conducted.
Net Ejection and Capture Element
In this section, we will give a description about the tether-net mechanism. The tether-net mechanism has three primary functions; firstly, it should be able to cast the net reliably. Secondly, during flying to the target the capture net should be deployed. Finally the net can be closed after the net envelope the target totally. To fulfil the above requirements, a scheme design is proposed in Fig.3. As Fig.3 shows, before casting the capture net is stowed in the net canister with four flying weights connected. When the flying weights are accelerated towards the target by the explosive elements, the net will be pulled out of the canister by the flying weights and fly to the target, the relative position of the flying weights will open the capture net gradually during the flying process. The bottom of the net is attached to platform by a connecting tether. When the net covers the target totally, the cord on net mouth will be tightened by the kinetic energy of flying weights and the net will be closed behind the target. If the capture mission is failed, or the captured target is in fast tumbling status that out of the damping capability of tether-net system, the connecting tether will be cut off by the tether cutter that fixed in the bottom of the mechanism.

Japan ETS-VII

Germany TECSAS

Tether-Net Mechanism Configuration
The capture net is illuminated in Fig.4, it has taper configuration with dimensions Φ10m in diameter and 8m in height, if necessary the dimensions can be enlarged. The threshold linkers are tension sensors used to connect the flying weights and capture net during the cast, but if the capture net is cumbered when the net covers the target, the tether tension will increase immediately, the threshold linkers will break off and the binding cord on the net mouth will be tightened to close the net.

Configuration of Capture Net
Because of the net and the connecting tether are both large flexible bodies, the tether-net dynamics is governed by complicated nonlinear equations, therefore it is complex to establish the dynamics of the system in details. In order to analysis the pre/post-capture attitude dynamics of the spacecraft, we mathematically established the system dynamics starting from the following simplifying assumptions:
The tether is mass less and inextensible. The tether is only capable of exerting force along straight line connecting the main satellite and capture net. The capture net and the main satellite are point masses. The mass centre of space system works along an unperturbed circular orbit. The target locates in a coplanar circular orbit.
The reference frames used to develop the system dynamics are orbital frame (OF) and body-fixed frame(BF): orbital frame is established with its origin in the mass centre of the system, the three axis are defined by unit vectors (
As described in Fig 6, α and β represent the in-plane and out-of-plane libration angles, we can writes the transformation between the two frames as:
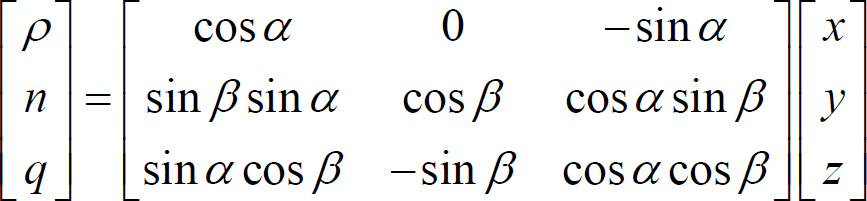

Orbital Frame

Body-Fixed Frame
Lagrange theorem provides a way to derive the equations of motions of the system, to develop system dynamics by using Lagrange theorem, the kinetic and potential energy of the tether-net system must be obtained first. In the following development, we represent T as the system kinetic and V as the potential energy, thus we have:

Where T
cm
, T
ext
and T
rotate
are the kinetic due to the orbital velocity, tether length variation, system rotation respectively. The kinetic term can be calculated as follows:

Where
The potential energy due to gravitational force of the can be achieved as follows:

By the definition of the Lagrangan, we can get
Where L
a
denotes Lagrange function, the motion equations of system can be derived by using Lagrange equation:

Substituting Eq. (3) and Eq.(4) into Eq.(5), and select α, β and L as the Degree of Freedom(DOF) of the system, eventually we can get the system dynamics as follows:

From the above motion equations we can see obviously that the longitudinal libration are coupling with in-plane libration and out-plane librations, which means that after capture net release the shape of tether-net system will present a libration and capture net will follow a curve trajectory. In fact, the out-of-plane libration is always at small amplitude and can be ignored reasonably, this is also consistence with the fact proven by Hill equations that out-of-plane libration can be decoupled from the in-plane librations.
Capture Strategy
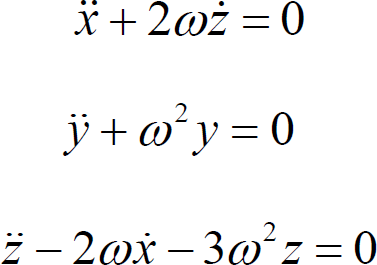
By ignoring the out-of-plane librations, the dynamics of the spacecraft can be simplified as follows if the tether force is zero:


Based on the simplified dynamics of spacecraft, the whole capture operation will performed in the orbit plane. Here we assume that the target also locates in the same circular orbit plane with tether-net robot system, the captures can be distinguished basically as V-bar and R-bar captures according to target position. In case of V-bar capture the robot system and target have same orbital velocity so that their relative position is determined by their orbital phase difference and remained constantly.
In case of R-bar captures, target locates on a coplanar orbit with robot system at different altitude, a relative drift w.r.t robot system will be presented between the two objectives due to the difference of their orbital frequencies. A set of equations, known as Hill equations, can be used to describe the target relative motion as follows:
Substituting the initial conditions into Hill equations, we can get the target relative motion as follows:
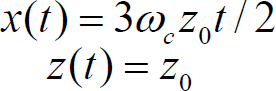
Where z0 denotes the initial position of target in orbital coordinate, we can see obviously that the target will perform free drift w.r.t robot system with a constant velocity.
For R-bar captures an important problem should be considered. Since the relative position and velocity between target and robot system should be detected by the target measuring system, which may includes optical elements, such as laser range finder and camera sensors, in order to avoid the earth disturbance on the optical sensors when pointing to the target, -R-bar captures is more appropriate and is suggested for disturbance avoiding on the optical sensors.
Non-control Capture Simulations
In this section, aiming at investigating the capture net motion during the capture, the R-bar and V-bar captures are simulated without control. At the beginning of the V-bar capture, the robot system should perform a manoeuvre to bring the robot system into the target orbit. Here we assume the altitude of capture orbit is 600km, the target is 100m in front of robot system, the tether strain is keep in -0.01N/kg constantly during the net release, the mass proportion between capture net and platform is set as 0.05. The capture net is cast at an initial velocity 8m/s along × direction and the initial length of connecting tether is 5m, the whole simulation duration is 20s. Based on the motion equations in section III, the attitude dynamics is simulated and the shape variation of spacecraft is be illustrated by Fig.7

Shape Variation in Case of V-bar Non-Control Capture
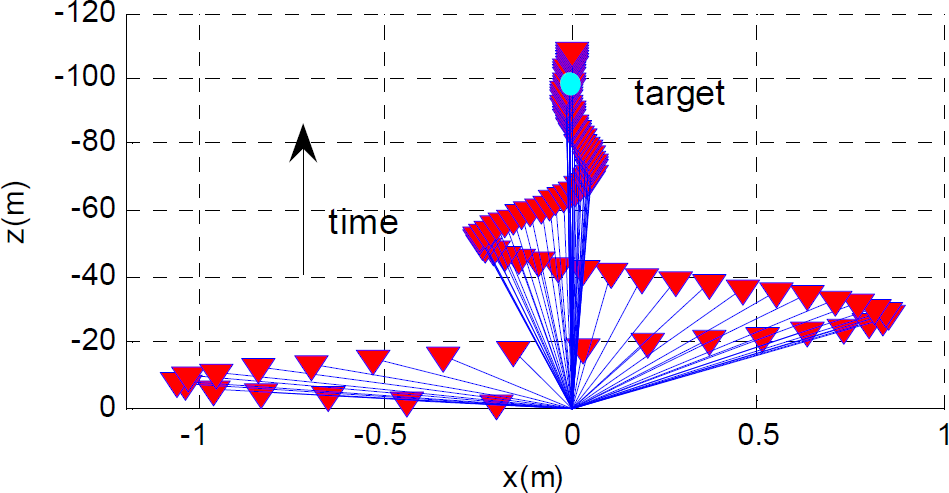
Fig.8 shows the -R-bar capture with a capture distance 100m along z direction. The system orbital and mass parameters are similar with the above simulation. The capture net is cast at an initial velocity 8m/s along z direction, the target is drifting freely above the tether-net system, the capture net is cast when the target passes R-bar.

Shape Variation in Case of R-bar Non-Control Capture
In the above figures, the capture net is denoted as triangles. From these figures we can see that if the capture net is cast towards target without control, the capture net will departure from the target direction in case of V-bar capture due to in-plane libration. For R-bar capture the in-plane libration and target relative drifting also will results in a capture deflection. The simulation result proves that some control scheme is needed for in-plane libration damping if a successful capture is expected.
The attitude dynamics of the tether-net can be controlled by tether force and thrusters, but the most direct and simple idea for libration damping is via the connecting tether, in this section we attempts to ascertain whether or not it is possible to control the capture net motion using the control algorithm only based on tether tension. In this case the system dynamics can be written as:


Where
By damping the in-plane libration, the net will fly to the target by tracking a straight line trajectory, therefore the in-plane libration angle will be kept as a constant, thus we have


Eq. (14) is a first order differential equation and its solution can be presented as

Here

Thus a control algorithm can be designed based on the net release velocity regulation,

The term uρ is the input acting on the connecting tether, L
t
is control objective. The next step is to investigate stability of its free response disturbance at its original point. Substituting (15) into (11), the disturbance response can be obtained as follows:

There is nonlinear term in the left of the Eq (12), by linearizing the nonlinear terms at original point, we can get

Δα denotes the disturbance, Eq.(13) is a second order dynamics system, it's stability can be determined by the eigenvalues. The eigenvalues can be expressed as

To fulfil the stable requirement, eigenvalues must locate in the left of complex plan. Thus the real number of eigenvalues must be positive:

Obviously, Eq.(16) is in conflict with Eq.(20). The confliction between the two terms proves that the effort to control the net motion only by tether tension can not fulfil the system demand. To improve the controllability of the system, an alternative control strategy must be proposed to meet with deflection reduce demand.
Feedforward Control Scheme
The result obtained in section V shows that the effort to damp in-plane libration only based on tether tension is impossible due to the instability of libration. As a measurement to promote the system controllability, thrusters should be introduced into the system as a control force. In this section, an integrated control scheme based on tether and thrusters will be discussed. By introducing thrusters the system dynamics can be written as:


Where θ(t) denotes thrusters torque acting on system along α direction. Obviously the closed-loop dynamics is converted into MIMO (Multiple Input Multiple Output) system by adding thrusters. In order to eliminated the nonlinear terms in the left of the equations, we linearize the dynamics by adding feedforward terms, then we have


Where e is the error, and L
d
is the control objectives. Substituting Eq.(23) and Eq. (24) in Eq(21) and Eq(22), the nonlinear terms can be eliminated and we can get close-loop error dynamics as follows:


Here the error motion can be stabilized by choosing appropriate Λ, then the objective motion L d and α d can be tracked by capture net.
Since the longitudinal motion is decelerated over time, therefore the capture net must be cast with a nonzero initial velocity. The straight line trajectory is also used as the expected trajectory and described as following:

Where α, is a constant, a t is positive acceleration, which will be determined by expected time consumption during the approach.
Feedforward Control Simulations
The following simulations are performed based on the cases in section; the captures are carried out in -Rdirection and V-direction respectively. The capture net is cast with an initial velocity L0 = 8m/s, the expected time consumption during approach is less than 40s, the acceleration is set a = −0.05m/s. Aiming at investigate the control force on the connecting tether and thrusters, we cast the capture net with an direction error w.r.t the target directions.
Fig 9 shows the case in which the capture net is cast for a–R-bar capture, by ignoring the free relative drifting of the target, the capture net is cast with an initial direction error w.r.t target direction 0.1, with the feedforward control we can see that damping amplitude will decrease with time lapse, the trajectory will converge with a straight line that along the target direction.
Shape Variation for -R-bar Feedforward Control Capture
Fig 10 shows the case of –R-bar capture, in this case the capture net is also cast with an initial direction error w.r.t target direction 0.1, with the feedforward control we can see that damping amplitude will decrease with time lapse, the trajectory will converge with a straight line that along the target direction. In this case because there is not relative drifting between target and tether-net system, so the capture will be successfully performed with the feedforward control.

Shape Variation for V-bar Feedforward Control Capture
The simulation results in Fig.11 show tether tensions variations with different initial direction error, these curves are for initial error cases of α0 = 0.05, α0 = 0.1, α0 = 0.15, α0 = 0.20 respectively, obviously the oscillation amplitude of tether tension increases with initial error increment. Fig.11 also shows that the tether control force becomes smooth and is stabilized at- 0.05 level after 15s.

The Tether Tension for Different Initial Error
Fig.12 shows the propulsion torque of trusters variations during capture net release. We also can see that the oscillation amplitude of torque will raise if the initial error increases, but after about 6s the propulsion torque tends to oscillate near to zero.

The Torque for Different Initial Error
By contrast with traditional rigid capture mechanisms, the flexible capture net has many advantages due to its physical characteristics. However, the orbital dynamical disturbance will result in an in-plane libration when the capture net is cast towards the target, which will leads to a capture deflection when the capture is performed without control. With an effort to damping the in-plane libration an control strategy based on tether tesion is investaged before an integrated controller based on tether tension and thrusters is proposed. By intuducing thrusters into system, the closed-loop dynamics is changed into MIMO from SIMO mode. The nonlinear closed-loop dynamics is linearised by feedforward strategy, finally the performance of the feedforward controllor is demonstrated by a series of simulations, the simulation results show that feedforward controllor is effective for in-plane libration damping and enable the capture net to track an expected trajectory.