
Abstract
According to the requirements of the mobile robot complete coverage path planning for some special missions, this paper introduces a bounded strategy based on the integration of the Lorenz dynamic system and the robot kinematics equation. Chaotic variables of the Lorenz system are confined in a limited range, while when they are used to produce the robot's coordinate position, the trajectory range is determined by the starting point, iterative times, and iterative step. The proposed bounded strategy can constrain all the robot positions in the workplace by a mirror mapping method that can reflect the overflow waypoints returning to it. Moreover, the statistical characteristics of the Lorenz chaotic variables and the robot trajectory are discussed in order to choose the best mapping variable. The simulation results show that the bounded strategy that uses the chosen variable can achieve a higher coverage rate contrary to other similar works.
Keywords
1. Introduction
The coverage path planning addresses the problem of requiring a traverse for every feasible area in a given workplace while avoiding obstacles [1]. It is needed for a variety of applications such as vacuum cleaning robots [2], lawn mowers [3], exploring underwater sources [4], demining robots [5], etc. Different coverage path planning algorithms are proposed for the above applications, such as the backtracking spiral algorithm (BSA) [6], back-and-forth method [7, 8], as well as some artificial intelligence algorithms, for instance, the neural network [9, 10], genetic algorithm [11, 12], etc. Each method can be suitable for different applications. As yet, there is no universal algorithm or method that can solve all above cases is found. For achieving some special missions, such as the surveillance of terrains [13], the terrain exploration for searching [14], or patrolling [15], the mobile robot tries to find the way to generate a trajectory, which will guarantee the surveillance of the entire terrain or the finding of the explosives. Furthermore, in the case of patrolling for intrusion, the path of the robot must be as much difficult to be predicted by the intruder as possible. Chaotic systems, due to their sensitivity to initial conditions, feature, and topological transitivity [16], provide the much-needed framework for achieving the previously mentioned tasks. Sensitivity on initial conditions will produce a totally different chaotic trajectory and make the long-term prediction impossible. Due to the topological transitivity, the chaotic mobile robot is guaranteed to scan the whole connected workplace. Now this goal is achieved by designing controllers, which ensure chaotic motion of the mobile robot. Though the random signal can also yield unpredictable trajectory, chaotic motion has a very important advantage because it is based on determinism. This means that the behavior of a robot can be predicted in advance by the system's designer.
In order to generate chaotic motions of the mobile robot, well-known chaotic systems, such as Arnold dynamical system [14, 17, 18], Lorenz system [19, 20], standard or Taylor-Chirikov map [13, 21], and Chua circuit [14], have been used. A chaotic path planning generator is produced by combing the robot kinematic motion with a chaotic dynamical system. Then, the robot can behave in a chaotic manner. Chaotic systems of different dimensions require diverse integration methods. One-dimensional systems have only one variable that is usually imparted to be as the robot's running orientation [22, 23], such as the Logistic map. And the two-dimensional systems, for example the standard or Taylor-Chirikov map [13, 21, 24], have two variables, and they can easily be used to control the robot's coordinate position. The three-dimensional systems have a very flexible selection because they have three variables [25, 26, 27]. Theoretically, any one of them can be chosen as the chaotic variable to control the robot's orientation. In fact, most of the current literature did so. They only discussed the application of the chaotic systems in the mobile robot and satisfied the mission requirements. While which variable can show better statistical results with regard to the coverage rate and how does the robot behave with an integration motion in the workplace have not been described in most literature. In this paper, we discuss a famous three-dimensional chaotic system, i.e., the Lorenz system. Compared with other nonlinear systems, the Lorenz system has a relatively simple structure, as well as a good chaotic characteristic that can obtain a higher coverage rate for a specific terrain. So, in this paper we use it to generate a chaotic path planner to fulfill the coverage path planning for some special missions, and discuss the above -mentioned problems in detail.
This paper is organized as follows. The basic features of the Lorenz dynamic system are presented in Section 2. Section 3 introduces the integration strategy of the Lorenz chaotic system and the robot kinematic equation, and the transformation methods for the integration differential formula to the difference one. The χ2 values are used to evaluate the statistical characteristics of the Lorenz chaotic variables and the robot trajectory, which are discussed in Section 4, and the robot coverage rate produced by the integration path planner is also discussed in this section. Section 5 presents the comparative result of the improved coverage strategy with the similar work with regard to the coverage rate. The last section outlines the conclusions and final remarks.
2. Lorenz Dynamic System
The Lorenz system is a well-known nonlinear dynamical system introduced by the meteorologist E. N. Lorenz. It is a three-dimensional dynamical system that exhibits chaotic flow [25]. The term “butterfly effect,” which in chaos theory means sensitive dependence on initial conditions, was first demonstrated by the oscillator.
In this system, the control parameters are the Rayleigh number r, the Prandtl number σ, and the geometric factor β. The Lorenz system is described by the following differential equation:

All

Simulation results of the Lorenz system for parameters
3. Integration Strategy of the Lorenz Chaotic System and the Mobile Robot
In order to generate chaotic motions of the mobile robot, we should integrate the Lorenz equation into the controller of the mobile robot to construct a chaotic path planner. First, we have to select a robot kinematic modeling that can produce the robot coordinate position (X(t), Y(t)) for the path planning by the robot linear velocity v and running orientation θ(t). Here, v is usually supposed as a constant value. And we only use orientation θ(t) to control the robot position. Second, the chaotic variable x(t) of the Lorenz system is mapped into the robot kinematic modeling to replace the robot orientation θ(t). So, the robot position changes according to the chaotic value x(t) and can demonstrate the chaotic characteristics to obtain a coverage path planning. Finally, a chaotic path planner is achieved. Because the followed bounded strategy each time required robot position (X n , Y n ) for boundary detection or mirror mapping computation, the planner has to be discretized for realization. The following equation (Eq. (2)) provides a robot kinematic modeling, formula (3) is the constructed chaotic path planner in a differential form, Eq. (4) solves the discretized parameters of formula (3), and Eq. (5) is the discretized chaotic path planner for formulae (3) and (4). The discretized form is used in our paper for the coverage path planning and the followed bounded strategy. The detailed construction procedure is described as follows.
The assumed kinematic modeling of the robot is [28]

where

The whole states evolve in a 5D space according to Eq. (3), which includes a 3D subspace of the Lorenz flow. So, the robot path planner possesses the chaotic characteristics.
Because the followed mirror mapping means and the bounded strategy for achieving the coverage path planning need each time robot position (X n , Y n ), Eqs. (1), (2) and (3) have to be discretized (X(t), Y(t)) to (X n , Y n ) for realization. By the four -order Runge-Kutta method, the discretization parameters of Eq. (1) are
where
where h is a small iterative step. Given the initial values
4. Statistical Characteristics of the Lorenz System and the Robot Trajectory
The target of the coverage path planning is to cover the whole workplace as quickly, randomly, and uniformly as possible for a special mission. Any of the three variables can be chosen as the mapping value, but which one can show better statistical characteristics or has a higher coverage rate after mapping into the robot? Here, we use the χ2 test to evaluate statistical characteristics of each variable [29].
The main thought of the χ2 test is to divide a time sequences into k same length subintervals between a defined range [a, b], and examine the diversity between the real frequency and theoretical one of the random sequence distribution in the subinterval. Define the real frequency of the ith subinterval random data as ni. And the corresponding theoretical frequency of this subinterval is defined as mi, here

Here, the χ2 value is not used to pass the random test. We utilize the value to evaluate the chaotic variables’ statistical characteristics. The smaller the χ2 value is, the better properties the chaotic variable exhibits. Two experiments are designed. One is to compute the χ2 values of the three chaotic variables of the Lorenz system, and the other is to calculate them for the robot position, or trajectory, in the workplace.
4.1. Statistical characteristics of the chaotic variables
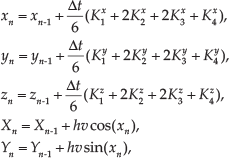
At first we analyze the statistical characteristic values that assume the χ2 data of the three chaotic variables xn, yn, and zn, respectively. Figure 2 shows N iterative values of the three chaotic variables, respectively. Here, the iterative time N = 20,000. Figure 2(a) and (b) assumes different starting points. Though the initial data are not very stable due to the random selection of the beginning iterative point, as long as the iterative time N is big enough, the computation error can be ignored.
Time sequences of the three chaotic variables of the Lorenz system with different iterative starting points
We analyze the computation procedure of the χ2 value for variable xn.
Divide all the data between
Total out the occupied numbers of each cell where the xn values are located in;
Compute the corresponding theoretical frequency of each subinterval, here
Calculate the χ2 value according to formula (6).
The computing procedure of the χ2 value for variable yn and zn is the same as mentioned above. Table 1 lists the χ2 values of xn, yn, and zn with different starting iterative points, respectively.
Though different initial points may produce diverse χ2 values, the relative relationship between variables is constant. Data from Table 1 show variable yn has the minimum χ2 value for both the groups, zn has the maximum value, while the value of xn lies between them. So, in the Lorenz chaotic system yn has the best statistical characteristics with regard to the uniformity. But when it produces the robot position by cosine transform, does it still have the best characteristics?
Statistical characteristics of chaotic variables

4.2. Statistical characteristics of the robot's position
All variables are mapped into the robot kinematic equation respectively to further test which chaotic variables show better statistical characteristics. The χ2 values of the robot position
All the


Robot iterative position
Figure 3 show the transformed trajectory after chaotic mapping. The χ2 values of each of the three variables are calculated using the method mentioned in Section 4.1. The coverage rate C, or the terrain coverage, which represents the effectiveness, as the amount of the total surface covered the known coverage rate (C), by the robot running the algorithm, is usually expressed by the following equation:

where

Here
Statistical characteristics of the robot position

Data in Table 2 show that the robot position produced by xn has the minimum χ2 value for the three variables after chaotic mapping, and it possesses the maximum coverage rate C. It appears that the statistical characteristics after transition are not consistent with the previous one. Then, chaotic variable xn is chosen to be as the mapping value. So, the iterative kinematics equation of the robot is

Later we use formula (10), or formulae (4) and (5), as the chaotic path planner to produce the robot trajectory in the workplace.
5. Statistical Characteristics of the Robot Coverage Trajectory
5.1. Characteristics of the traditional coverage trajectory
Given a random initial point in the workplace, the robot trajectory, or the position
Here
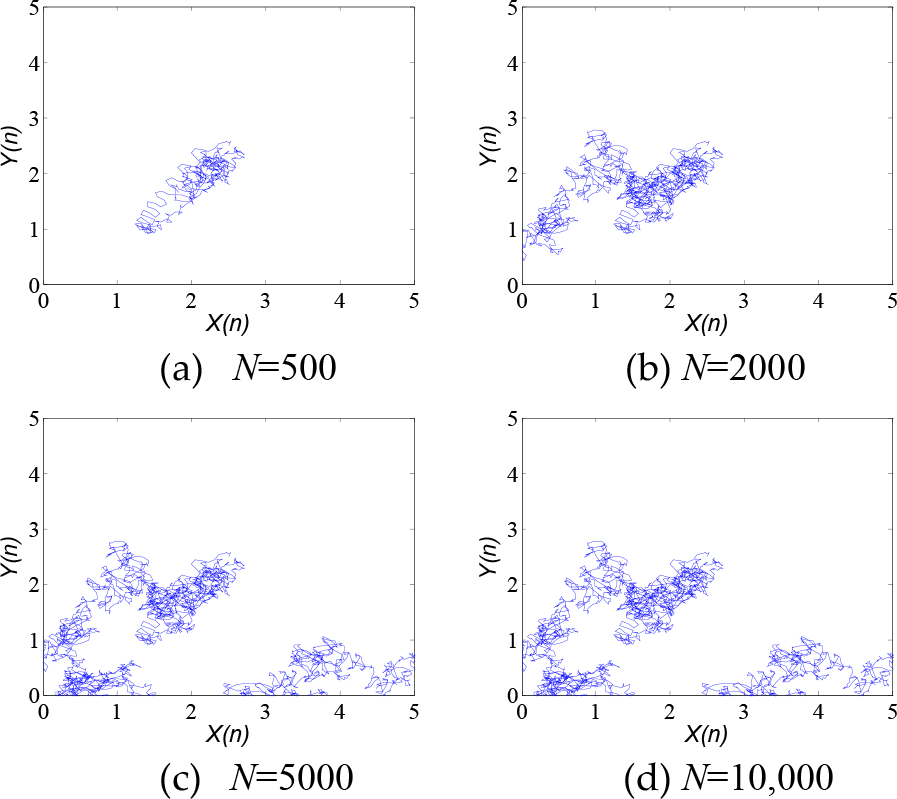
Here assume a 5×5 workplace. Figure 4 shows the robot trajectory with different iterative times.

Snapshots of the robot trajectory with the initial point
In order to increase the simulation speed, the iterative step adopts a relatively large value, here h = 0.1. When the iterative time N=10,000, there are some robot positions that are located out of the boundary. If the initial point is selected improperly, such as
Snapshots of the robot trajectory with the initial point
5.2. Characteristics of the bounded coverage trajectory
Here we use mirror mapping method to reflect the overflow points into the robot workplace or a defined range. Figure 6 displays all overflow circumstances and their reflection principle. The resolving means of other special circumstances that are not mentioned here belong to them. Suppose coordinate

The right line is defined as

The up line is defined as

And the below line is defined as


Mirror mapping
For the circumstances of Figure 6 (a)–(d),the reflection point
In Figure 6(b), it is defined as
In Figure 6(c), it is defined as

In Figure 6(d), it is defined as

While for the circumstances of Figure 6 (e)–(h),the reflection point

In Figure 6(f), it is defined as

In Figure 6(g), it is defined as

In Figure 6(h), it is defined as
Then, the obtained reflection point
The procedure of the novel coverage path planning of the robot is as follows:
Initialize the parameters. The total iterative time N = 30,000, chaotic variables
Judge whether
According to the corresponding formula (16)– (23), compute the reflection point
Update
Minus N by 1. Judge whether N = 0 or not. if no, switch to (2); otherwise stop the procedure.
The flowchart of the algorithm is shown in Figure 7.
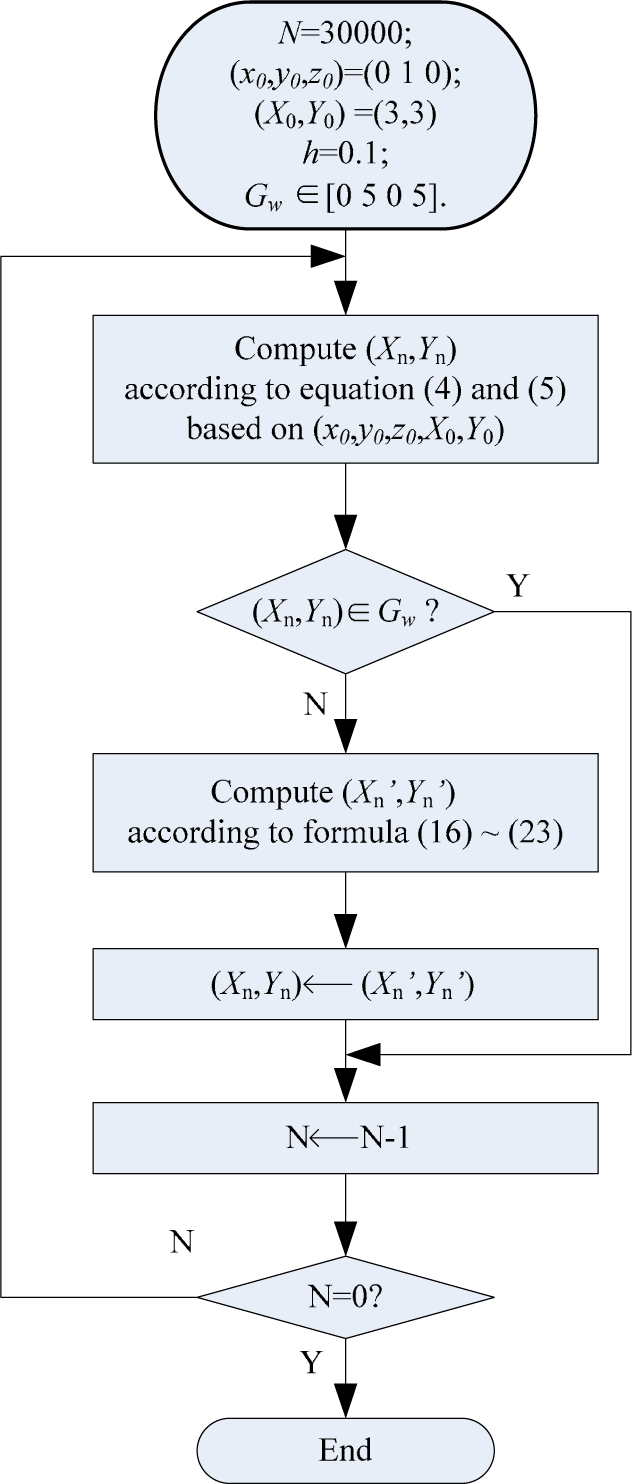
Flowchart of the algorithm
Figure 8(a) shows the simulation result of the robot trajectory by the bounded method. The blue dots are the robot position

Coverage trajectory of the robot in the workplace

Bounded strategy for coverage trajectory of the robot in the workplace
6. Conclusion
In this paper, we have discussed about the chaotic Lorenz equation and its application in the robot coverage path planning. A novel strategy that has been added to boundary constrained is used to enhance the coverage rate for the robot and can show better performance in contrary with the unconstrained method. This strategy can be extended to other three-dimensional equations, such as Arnold, Chua, etc. And, there are other factors that should be considered:
The mirror mapping is used to constrain the overflow robot positions in the workplace. It is simple and can also be used for obstacle avoidance of the robot in the further work;
The χ2 value provides a tool to evaluate the statistical characteristics of the chaotic variables. The smaller it is, the better behavior the variable shows. From the values and the simulation results, we can also see that though the constructed chaotic path planner can satisfy the special task requirements of the coverage path planning, the uniformity of the chaotic variables is not good. So, the characteristics should be improved in the future;
In the simulation, more sampled data should be obtained in order to guarantee that the statistical results are more meaningful.
Footnotes
7. Acknowledgements
This work is supported by the National Natural Science Foundation of China (Nos. 61473179, 61573213, and 61233014) and Natural Science Foundation of Shandong Province (Nos. ZR2014FM007 and ZR2015CM016).