
Abstract
Aiming at the unpredictability and nonlinearity of the Lorenz chaotic system, this paper takes the fluid thermal convection of the infinite plate as the model, and studies the sliding mode control of the fluid thermal convection of the infinite plate based on LMI. Based on the characteristics of the Lorenz chaotic system, the sliding mode control method is applied to attenuate the effects of some nonlinear factors, and the Lyapunov function is designed to obtain the control law that satisfies the sliding mode conditions. Further, a dynamic compensation algorithm is presented, it can efficiently regulate the poles of a closed-loop system, and ensure that the specific matrix is negative definite. The simulation results show that under the action of the compensator, the dynamic perturbed Lorenz chaotic system has a good state response, which makes the sliding mode control of the Lorenz chaotic system stable.
Introduction
In recent years, the research on chaotic systems has always been a hot spot, and some researchers have achieved good results.1–5 Chaos theory is the basis for analyzing chaotic systems. Chaos theory is a method that combines qualitative thinking and quantitative analysis, which cannot be described by a single data relationship, and its behavior must be interpreted and predicted by an overall and continuous data relationship. 6 Chaos theory has a wide range of applications in natural sciences and social sciences. For example, the fish school search algorithm uses chaos theory to generate uniformly distributed pseudo-random numbers. 7 According to chaos theory, some researchers have realized simultaneous measurement, compression, and encryption of original images in the process of measuring the matrix in both directions. 8 Some researchers also use the two chaotic dynamic theories of logical mapping and tent mapping as the optimal strategy function of the aggregate growth model. 9 In addition, some researchers analyzed two-phase pressure signals through chaos theory on the premise that spectral density function, Lyapunov exponent, pseudo phase plane trajectory, and fractal dimension are known. 10
In the relevant research on chaotic system, the fluid motion model on the plate is favored by many researchers, because it has a wide range of application prospects in the production processes, such as the attraction of magnetic field, the production of paper, the stretching of plastic film, conduction of heat radiation, and so on.11–15 Hamamed et al. 16 assumed that the viscosity and thermal conductivity of the fluid are temperature functions, and studied the effects of thermal radiation on the flow and heat conduction of micropolar fluid mixed convection thin films. Maghsoudi et al. 17 studied the natural convection and flow characteristics of non-Newtonian nanofluids flowing between two infinite vertical plates under the action of magnetic field and thermal radiation. Damseh and Shannak 18 studied the characteristics of unsteady convection on a vertically porous continuous moving plate under the condition of incompressible viscoelastic liquid.
The research of sliding mode control is also a hot spot, and many scholars have made good achievements in this field.19–24 In the control research of proton exchange membrane fuel cell system, Ahmed 25 uses second-order sliding mode control to overcome the flutter phenomenon caused by traditional sliding mode control. In the research of networked control systems, Wang et al. 26 designed sliding mode control for a class of discrete networked switching systems under the condition of coded communication protocols. In addition, Shen et al. 27 adopts an adjustable quantization method to deal with the sliding mode control of Markov jump systems with general transition probabilities. For the study of linear discrete-time time-delay systems, Ghrab et al. 28 proposed a new robust discrete-time sliding mode control scheme under the assumption that the time-delay affecting the state and input is known, time-varying and bounded. However, most of the above adaptive control methods are compared with the sliding mode control methods in the literature.
There are also many researches on chaotic systems based on sliding mode control. For example, in Nastaran and Ali, 29 the chaos control of scalar delay chaotic systems based on sliding mode control strategy is studied. For uncertain chaotic systems with Lipschitz nonlinear function, time-varying delay and disturbance, a method combining composite nonlinear feedback and integral sliding mode technology is proposed in Saleh. 30 In Piyush et al., 31 a controller based on recursive backstepping sliding mode control is proposed to control the chaotic dynamics in biological systems to stabilize at any position or track any trajectory varying with time. For fractional order nonlinear systems with uncertainties and external disturbances, a switched sliding mode control technology is proposed for control and chaos suppression in Majid et al., 32 In addition, there are some studies on sliding mode control based on LMI. For example, based on the sliding mode control of the vehicle speed system, the tracking problem and stability of vehicle speed system are studied in Gao et al. 33 For the problem of vertical tail damage, an adaptive sliding mode fault-tolerant control method is proposed in Zhuang et al. 34 Zhang and Shen 35 investigate the quantized sliding mode control of Markov jump systems with time-varying delay, a dynamical adjustment law is explored to quantize the system output. These methods used in the above literature are relatively novel. However, LMI is a powerful design tool in many fields, such as control engineering, system identification design, and structural design. There are relatively few studies on sliding mode control of chaotic systems based on LMI.
It can be seen from the above literature that although various control methods are unique, most of them are based on the absence of external disturbance. In the process of requiring a specific matrix to be negative definite, the method of adding a compensator has been used. There are relatively few cases of designing. Inspired by the above discussion, the dynamic disturbance of Lorentz chaotic system of fluid thermal convection between infinite plates is studied in this paper. There are roughly three aspects of contribution:
In the process of studying the Lorenz chaotic system with thermal convection between infinite plates, the combination of LMI and sliding mode control method can overcome certain nonlinear factors and improve the control performance of the chaotic system.
When solving the sliding mode parameters, adding a compensator in the sliding mode control can regulate the poles of a closed-loop system, and ensure that the specific matrix is negative definite.
Considering the dynamic disturbance, the dynamic compensation algorithm is used to ensure that the closed-loop system satisfies the Hurwitz condition, and the numerical solution obtained by LMI is combined with a dynamic compensator to ensure the stability of the system.
The remainder of this paper consists of several parts. In Section “Preliminaries and problem formulation,” necessary preliminaries as well as problem formulations are introduced briefly. In Section “Main results,” we designed the control law without dynamic interference, and then studied the change of the control law after adding dynamic interference and gave the conditions for satisfying the negative definiteness of a specific matrix. The simulations and summaries are provided in Sections “Simulation and analysis” and “Conclusion,” respectively.
Preliminaries and problem formulation
Preliminaries
For the following chaotic system: 36

where α∈[0, 1], when α∈[0, 0.8) is satisfied, (1) is the Lorenz chaotic system; when α = 0.8 is satisfied, (1) is the lv chaotic system; when α∈(0.8, 1] is satisfied, (1) is the chen chaotic system.
When α = 0, this mathematical expression represents the Lorenz chaotic system of fluid thermal convection between infinite plates we will discuss.
Problem formulation
In this section, the Lorenz chaotic system of fluid thermal convection between infinite plates will be discussed.
Analyzing and discussing the Lorenz chaotic system,36,37 the fluid thermal convection motion system model between infinite plates is as follows:
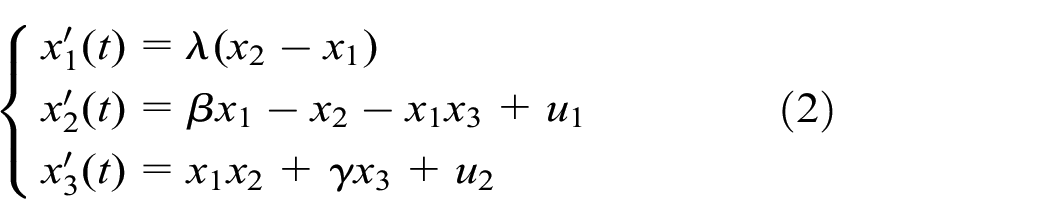
where λ is the Prandtl number, β is the Rayleigh number, γ is the reverse direction,
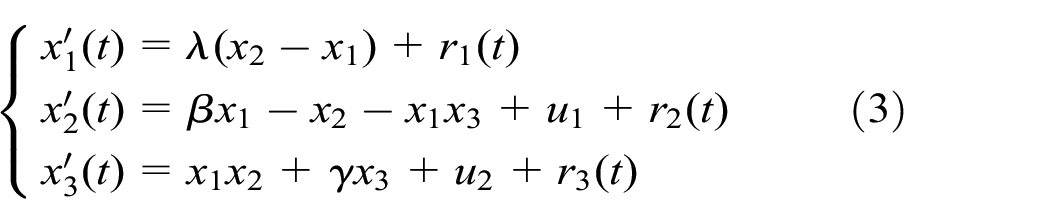
When the internal variable disturbance r(t) is added, equation (2) can be changed to:
where
Formula (3) can be transformed into:

where

Main results
In this part, the Lyapunov function is used to obtain the control law, and the method of adding a controller is used to ensure that the specific matrix is negatively definite, then the value of the sliding mode parameter is obtained.
Sliding mode control of chaotic system based on LMI
In order to realize

where
In order to satisfy the sliding mode condition, the Lyapunov function can be designed as:

then

The derivative of the Lyapunov function can be obtained:

where
The control law can be designed as:

where
Combining formula (7) and formula (9) can be obtained:

It can be seen that when t→∞,
Due to

Therefore,

where Q = A − BWA, at this time, formula
From equation (5), we can see that x → 0 cannot be guaranteed. In order to guarantee x → 0, take the Lyapunov function as

The derivative of
In order to guarantee

Using the LMI toolbox to solve the inequality (15), the value of the sliding mode parameter W can be obtained. But this method may get
Sliding mode control of chaotic system with compensation based on LMI
Next, we focus on the Lorenz chaotic system that can have a stable state for the convective motion of the fluid between infinite plates. This process consists of two parts, which are design of the compensation algorithm and proof of achieving the sliding mode condition, respectively. In order to ensure that the specific matrix (15) is negative definite, we have added a compensator. The impact of the control law is improved.
In order to ensure that

where z is the state of the compensator,
At this time, in order to realize x → 0, the sliding mode function can be designed as

where
The matrices W and K in equations (16) and (17) can be solved through the LMI toolbox, then

To satisfy the sliding mode condition, the Lyapunov function can be designed as equation (6).
Then the derivative of the Lyapunov function can be obtained
the control law is designed as

From formula WB = I, we can get

it can be seen that when t →∞, there is s → 0.
The value of
thus
Further there is the following result:

since the sliding mode condition is satisfied, then

assume P = A − BWA − BK + BW, that is
From equation (17), it can be seen that x → 0 cannot be guaranteed. In order to guarantee x → 0, the Lyapunov function can be taken as

Derivative of

In order to guarantee

The LMI toolbox can be used to solve the inequality (27), the values of the sliding mode parameters W and K can be obtained.
In MATLAB, the eigenvalues of matrix
Simulation and analysis
In order to verify the validity of the above results, the LMI toolbox in MATLAB is used for simulation. Here, the Lorenz chaotic system is tested first, Figure 1 shows the closed-loop control structure of the Lorenz chaotic system. The model of Lorenz chaotic system is also used in the example of Wang et al.,
38
and the system is controlled by Jamal’s controller. Equation (2) can be a coupled chaotic system, when

we also add the external time-varying disturbance

The closed-loop control structure of Lorenz chaotic system.

The chaotic state of the system under zero control input.
For the chaotic system of formula (3), the characteristic value of
It can be seen that if the sliding mode function is designed according to formula (9), there is no guarantee that formula (15) is negative definite.
Therefore, when the compensation algorithm is added to the sliding mode function, the problem caused by equation (5) can be effectively solved. Using the LMI toolbox, the characteristic value of
According to formula (16) and formula (17), the sliding mode function is designed, and the compensation algorithm formula (16) is used to ensure that the closed-loop system meets the Hurwitz condition. 39
In equations (3), take

Then the sliding mode function can be written as

Formula (21) is adopted for the control law, taking ε = 2, The state response of the system, the control input of the system, and the change of the system compensator are simulated.
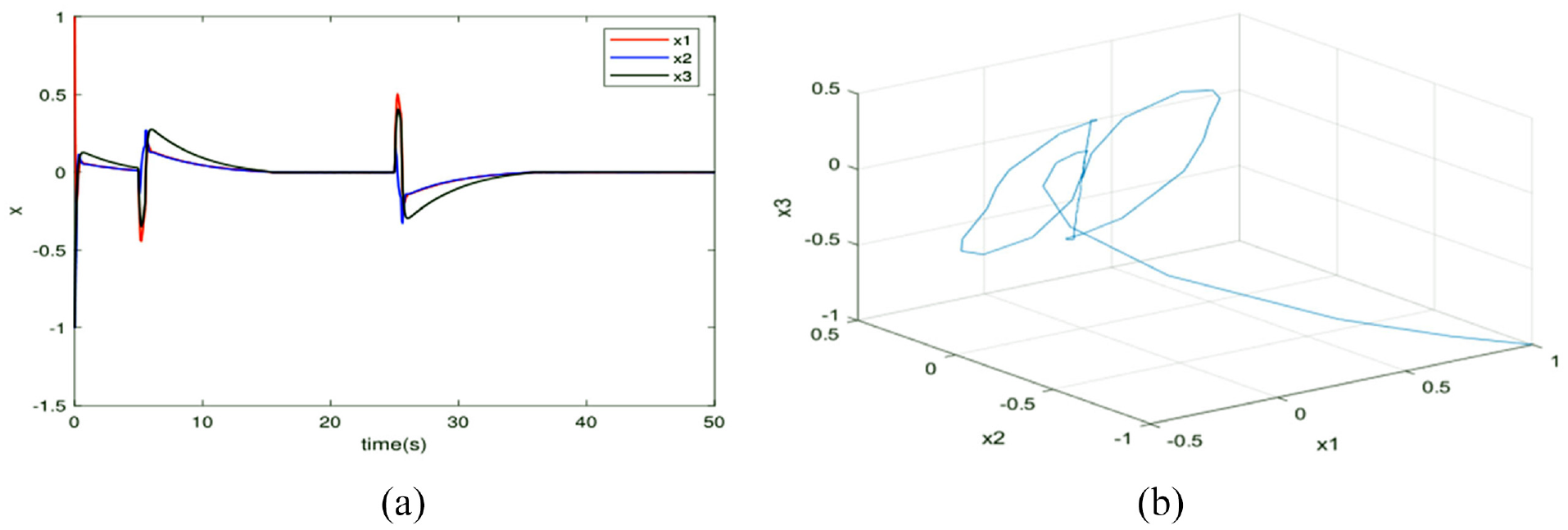
In Figure 3(a), the state response eventually approaches zero under the action of the Jamal’s controller. In Figure 3(b), the overall change of the system is shown, and the trajectory finally runs to an attraction point. In Figure 4(a), for the Lorenz chaotic system of fluid thermal convection between infinite plates, the convection intensity changes greatly in the first 3.5 s and gradually approaches zero after 3.5 s; the temperature difference changes greatly in the first 3.7 s and gradually approaches zero after 3.7 s; the nonlinear intensity of temperature in the vertical direction changes greatly in the first 3.6 s and gradually tends to zero after 3.6 s. In addition, due to the randomness of external disturbances, the three state variables will fluctuate briefly, it still approach zero finally, but the time to converge to zero is significantly longer for Jamal’s controller than the controller we designed. In Figure 4(b), the overall change of the system is shown, and the trajectory eventually runs to an attraction point. To sum up, we can say that the controller we designed has better performance.
(a) The state of the system state response in two dimensions with Jamal’s controller and (b) The state of the system state response in three dimensions with Jamal’s controller.

(a) The state of the system state response in two dimensions with our controller and (b) The state of the system state response in three dimensions with our controller.
When external disturbances are not added, in Figure 5, the control input eventually converges to zero at approximately the 5th second with the Jamal’s controller. In Figure 6, for the Lorenz chaotic system of fluid thermal convection between infinite plates, the control input component

Control input of Jamal’s controller.

Control input of our controller.
In Figure 7, although the compensation state eventually tends to zero, it lasts for a long time. After adding external disturbance, the time that disturbance affects the compensation state is also long. It can be seen from Figure 8 that the compensation state changes greatly in the first 2.1 s of the chaotic system operation, after the 2.1 s, the compensation state gradually approaches zero. When external disturbances are added, the compensation state would quickly return to zero.

Compensator state of Jamal’s controller.

Compensator state of our controller.
Conclusion
In this paper, in the study of sliding mode control of Lorenz chaotic system of infinite thermal convection between plates, a compensator is added to the sliding mode control to overcome some external disturbance factors and ensure the negative definiteness of the specific linear matrix. In order to adjust the pole of the closed-loop system, a dynamic compensation algorithm is proposed to ensure the closed-loop system that satisfies the Hurwitz condition, so that the LMI-based dynamic disturbance chaotic system can reach the ideal state, and the Lorenz chaotic system will eventually become stable. The simulation results show that the designed controller and compensator have a good control effect on the Lorenz chaotic system with infinite fluid-heat convection between plates.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant no. 1971181), the Provincial Teaching and Research Project of Higher Education Institutions in Hubei Province(Grant No. 2020602), the Natural Science Foundation of Hubei Province (Grant no. 2021CFB578), and Science and Technology Research Project of Hubei Provincial Department of Education (Grant no. B2022156).
Data availability statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.