
Abstract
The world is ageing and this poses a challenge to produce cost-effective solutions that can keep elderly people independent and active by assisting them in daily living activities. In this regard, this paper presents a new control method to provide physical assistance for any of the user joints (e.g., hip, knee, elbow, etc.) as needed by the wearer, by means of an assistive non-medical single joint exoskeleton with a “harmonized controller” capable of providing assistance in a natural way, and varying the assistance as needed by the user performing some activity. The control method is aimed at exoskeletons to provide assistance to users facing difficulty in any activity such as walking, sit-to-stand, etc., and, other than providing assistance as needed, it can also reduce the muscular effort for a completely healthy user.
Harmonized control uses exoskeleton-integrated force sensors and motion sensors to identify the user's intentions and the assistance level required, generating appropriate control signals for the actuators by implementing a simple PID controller.
To verify the proposed harmonized-control technique, simulations using MATLAB/SIMULINK were performed for a single joint system. An experimental test rig for a single joint was also developed using MATLAB Xpc Target for real-time control. User tests were also carried out for the knee joint and the results obtained from simulations, experimentation and user tests are reported and discussed here.
The results achieved to date and reported here show harmonized control to be a promising user-centric solution for the development of single joint assistive exoskeletons for support as needed by the user in daily living activities.
1. Introduction
Research and development in exoskeletons has picked up pace in recent years, and some of the exoskeleton products are already in the market or close to launch, such as the military application exoskeleton HULC from Lockheed Martin to allow soldiers to carry heavy weights on the battlefield [1], the HAL exoskeleton from Cyberdyne for rehabilitation and non-medical uses [2], ReWalk and Ekso for people with spinal cord injuries to allow them to walk on their own using crutches for control and stability from ReWalk [3] and Ekso Bionics [4], respectively. However, the R&D remains focused on the medical or military sector, with exoskeletons that assist a spinal-cord-injured person or for the rehabilitation of stroke victims, etc., or for soldiers to carry heavy weights and perform physically intensive activities. However, the field of non-medical assistive exoskeletons still remains largely untapped, with only a few examples available. The non-medical assistive exoskeleton field has vast potential and various application areas. Non-medical assistive exoskeletons can be a cost-effective solution for the support of elderly persons who face difficulty in performing daily living activities such as walking, sit-to-stand, etc., and need care staff's help. These devices can keep them independent and active in their homes for as long as possible, and will become the key solution in tackling the global ageing challenge in the near future [5] in terms of both cost effectiveness and health. Other fields of application include assistance for workers in physically intensive jobs and support for healthy adults for performing everyday activities.
Most of the current research in exoskeleton control methods either make use of electromyography (EMG) sensor signals to identify the intention of the person to move and provide physical assistance based on that data, or else imports conventional robotic methods to control the exoskeletons. A detailed study of various control methods developed for exoskeletons is provided in [6].
Electromyography (EMG) is an electrodiagnostic technique for evaluating and recording the electrical activity produced by skeletal muscles. An EMG sensor detects the electrical potential generated by skeletal muscle cells when these cells are neurologically or electrically activated. Some examples of exoskeletons using the EMG-based control methods are discussed in [6–9]. However, EMG-based control signals of exoskeletons have the drawback that the EMG sensors have to be gelled to the skin of the user and the exoskeleton has to be tediously calibrated for each individual user. Furthermore, the variability of EMG signals across different people means that using the same exoskeleton for different users is difficult. Although EMG-based controllers for exoskeletons claim to provide good assistance, they are not practical for everyday use.
Another commonly used control method is model-based control, a few examples of which can be found in [10–14], and a good example of which is the BLEEX exoskeleton [10]. Although model-based control can be good in terms of providing stability to the system, the precise requirements of the human biomechanical-musculoskeletal parameters and exoskeleton mechanical parameters to be known can be hard to achieve, especially when the same exoskeleton has to be worn by different users. In [10], it is clearly stated that the precise knowledge of model parameters is essential for implementation of this control. Furthermore, in assistive exoskeletons, providing stability is not an essential requirement as the user is the one providing stability to the combined exoskeleton-human system.
Trajectory generation and impedance/admittance-based control have also been developed as discussed in detail in [15–21]. However, there are no simplistic, practical techniques available that can be used in an assistive exoskeleton application to supplement the torque at the joints of the human user who might have weakened muscles. Trajectory generation-based control methods can be useful in a rehabilitation set-up, but not, however, for an assistive exoskeleton. Impedance-based control provides assistance at a fixed level at all times and not as needed by the user. A user-centric control method, on the other hand, that can provide assistance in a natural way as needed by the user during a particular span of time and not fixed assistance at all times, needs to be developed. In [6], with its extensive review of the currently developed control algorithms for exoskeletons, it is noted that there are no available control algorithms that can provide a user with assistance as needed.
Considering this, the authors propose a new user-centric “harmonized control” methodology which can provide assistance as needed in a comfortable manner, using only force sensors integrated into an exoskeleton for performing activities such as walking, standing, sit-to-stand, carrying, etc. In the following sections, the technique and methodology will be discussed in detail, with simulation and experimental set-ups to test and verify the technique, as well as the results of the verification.
2. The User-Centric “Harmonized Control” Method
The method described here has already been filed as an international patent by the authors. The description provided here takes the single joint exoskeleton as an example worn by the user on any upper or lower leg; however, it is not confined to this description and it is hypothesized that it can be used in a multi DOF setting.
2.1. Harmonized control method
The harmonized control method is for use in assistive exoskeletons that are worn by a user who is elderly, or a healthy adult who has full or weakened functionality, in order to perform daily living activities such as walking, sit-to-stand, etc. or similar upper-body activities. It interprets force sensor signals such that the information in the signal is the error of a human's current and desired position, and generates an appropriate control signal for the actuator using a simple controller to provide assistance to the user.
Consider a human-exoskeleton coupled system in which the human provides torque labelled “ τh ” to the joint and torque labelled “ τe ” is produced by the exoskeleton. Due to the coupling of the human and the exoskeleton, it can be assumed that both the exoskeleton joint and the human joint are aligned and move synchronously. This results in the sum of the torques, i.e., “

Human-exoskeleton coupled system, considering a single joint exoskeleton
If the user has full functionality and is not weakened, due to ageing muscles etc., this will result in achieving that desired position. However, when the human has weakened physical functionality, the human's desired position will not be achieved and they either will keep trying to achieve it or will have limited movement.
A force sensor is integrated into an exoskeleton and is placed on the human limb as an attachment; it can recognize the human's intention caused by movement of the human's limb. Based on this information, the controller generates an appropriate torque command “ τe ” that can be added to the human torque “ τh ” to produce the position “ θ ” of the joint.
The control scheme proposed will try to reduce the force signal to a minimum by providing assistive torque via the exoskeleton actuator system. If the force sensor is placed at both the front and back of the human limb, then we can detect intentions of both forward and backward movements of the joint. For example, if it is considered to be a hip exoskeleton, the force sensors can be placed at the front and back of the human thigh, and integrated into the exoskeleton attachment.

Fully detailed harmonized control loop for an assistive exoskeleton
Figure 2 illustrates the harmonized control method in full detail. The human intention signal is measured from the human limb via the embedded force sensors in the exoskeleton coupled to the human. The signal is defined as the error difference “e” between the human's current position and their desired position, known only to the human, and passes through the inherent delay of the sensor, which can be expressed as:

where “a” is the time delay in sensor feedback, which is dependent on the internal dynamics of the sensor.
This feedback architecture differs from that of conventional feedback control, in the way that the signal picked up from System 1, i.e., the human, is considered as a feedback to System 2, the “exoskeleton”, which is coupled with System 1; this is not the case in conventional feedback control systems. One of the most important facts in the proposed method is that the reference input is not known and only the error is inferred from the sensor signal.
The force sensor signal is interpreted such that it gives an error signal that is perceived as a lack of energy in the human to reach the desired position. If the error signal is high, it means that higher assistance is required and assistance requirement decreases as the sensor signal decreases. In one way, the exoskeleton control can be a conventional PID controller with the form of full PID or PD, or can be in full parallel PID form, such as:

The values of “

The PID controller can be replaced with any controller that reduces the error signal from the sensor. Based on the error signal, the assistance can be provided in a natural way for reducing muscular effort for healthy persons or for persons with weaker muscles. It is also possible to use a reference set point as a reference signal at which the exoskeleton should start providing assistance. The motor control can be implemented using an appropriate combination of PID to acquire an inner loop for precise current control.
The exoskeleton inputs the energy into the system in a natural way, and the total energy in the human exoskeleton system is the sum of energy from the human and energy from the exoskeleton.
Similarly, it is hypothesized that the harmonized control can be easily extended to a multi-DOF active exoskeleton by using similar techniques or applying multivariable feedback. However, this paper focuses on the implementation of a single joint scenario.
2.2. Simulation set-up
To simulate the method proposed in the previous section, a single human joint and limb were considered to be a simple second-order system. The system parameters were selected such that the system can respond to input signals of up to 3–4Hz without any delay, as most human activities are below these frequencies. The control loop was based on the illustration in Figure 2. The control for the human part of the system was developed as a feedforward PD controller. The reference input trajectory was a sine wave of 2Hz.

Simulation set-up in MATLAB/SIMULINK for a single joint
The simulated scenarios included were 1) the human has 100% muscle strength and the exoskeleton is switched off, 2) the human has 70% muscle strength and the exoskeleton is switched off and 3) the human has 70% muscle strength, the exoskeleton is switched on and providing the missing energy as needed. The second-order system derived from the requirements above to represent the human joint and limb is:
From equation (1), the delay in the force sensor dynamics represented by ‘a’ was considered to be 0.001, which implies that it was assumed that the sensor response was fairly fast. The PD values for the exoskeleton control were selected using the Nicholas Ziegler method. The motor dynamics were not considered in this simulation set-up. In the scenario, it is assumed that the human has lost 70% of his/her functionality and the remaining 30% comes from the exoskeleton when it is switched on, and that it does not provide more than 30%.
2.3. Experimental set-up
After the simulation set-up, an experimental test rig was designed to verify the proposed harmonized controller experimentally. The rig was a simple pendulum-type system with a link and a bob of weight of 6kg. The rig was mimicking a human knee joint with the weight of the shank and the foot represented by the bob weight. The link of the system had a weight of 0.5kg. At the pivot of the system (referred to as the joint, hereafter), two motors were coupled in parallel but in opposing directions.

The experimental set-up developed for experimental testing, representing a human knee joint with the shank and foot weight as the bob
One motor produces torque
The control of the motor mimicking the “human muscles” had to be changed from the simulation set-up in which feedforward control was used. As the form of control used is motor control, it was decided to use position-feedback computed torque control, and the weakness of human muscles was produced by using saturation to limit the current output to the motor. First, the system dynamic equations were calculated and then computed torque control was used. This produces an equation of the form:

where

Full control configuration for real-time harmonized control implemented in MATLAB
In the second phase of the experimental tests, the motor representing the human side was removed as well as the bob weight, a simple attachment belt was attached to the link and a footrest was added for the foot. By doing this, an actual human user was able to attach the simple exoskeleton structure to the shank and test the performance while swinging the leg. The results of this simple user test are provided in the next section.
3. Results
In this section, results from simulation tests, experimental tests and user tests are presented and discussed.
3.1. Simulation results
From the simulation set-up as described in Section 2.2, a reference input of sine wave of 2Hz with an amplitude of five degrees was given to the “human system”. As in equation (1), it is hypothesized that the force sensor picks up the “error” signal that is the difference between the human's current position and desired position (in this case, the reference input). Figure 6 shows the results of the simulation. When the human is at 100% and the exoskeleton is switched off, it is shown that the human reaches its desired position. In the second scenario, when the human's muscles are weakened and he/she has only 70% strength left, the human can no longer achieve the desired movement as the exoskeleton is also switched off. In the last scenario, the human has 70% strength but this time the exoskeleton is turned on, it provides the missing strength and results in the human achieving the desired motion.

The result of the simulation of the harmonized-control method of simulation for achieving the desired human movement, with the human at 100%, the human at 70% and the exoskeleton switched off and the human at 70% and the exoskeleton switched on
3.2. Experimental results
For the experimentation, Maxon motors with EPOS2 motor drivers were connected to the real-time machine with DACs on an MF624 card. The force sensor inputs were connected to the ADCs on the machine. The inputs/outputs were in the SIMULINK model with a sampling time of 1ms. Motor encoder signals were also fed back into the real-time model for detecting the direction of motor movement and to control/change direction using simple logic decisions. The force sensors used in this case were Measurement Technology's FC22 load cells with a detection range between 0 and 50N. However, the technique is not limited to them and any type of force sensor can be used. The gain values for the human side of the controller and harmonized control are provided in Table 1.
An on/off switch was also placed in the SIMULINK model connected to the exoskeleton motor to turn on/off the exoskeleton motor when desired, and to perform the same three scenarios as in the simulation tests. Saturation blocks were used for the exoskeleton motor because it should only provide up to 30% assistance, as in the simulation set-up. PI controllers for the motor current controls were tuned using EPOS studio software.

Detailed picture of the experimental set-up with real-time hardware and mechanical set-up
Control gains for different controllers in experimental setup

The experiments were performed with a reference input of a sine wave to the “human motor” with amplitude of 20 degrees for the position while frequency was 1Hz. Figure 8 shows the result for the human movement. In the first few seconds, as shown in the figure, the human is not able to achieve the desired movement by up to 20% because the exoskeleton is turned off and the human motor has reduced the torque output to mimic weakness of the “human muscles”. When the exoskeleton motor is turned on, the human starts to achieve the desired motion with the added assistance of the exoskeleton. The movement mimics a type of swing motion of the limb while in walking phase. The joint is considered here as a human knee joint. It is observed that the assistance added by the exoskeleton is the assistance needed by the human.

Experimental result of the harmonized control method test with a test rig mimicking human joint/limb motion coupled with the exoskeleton
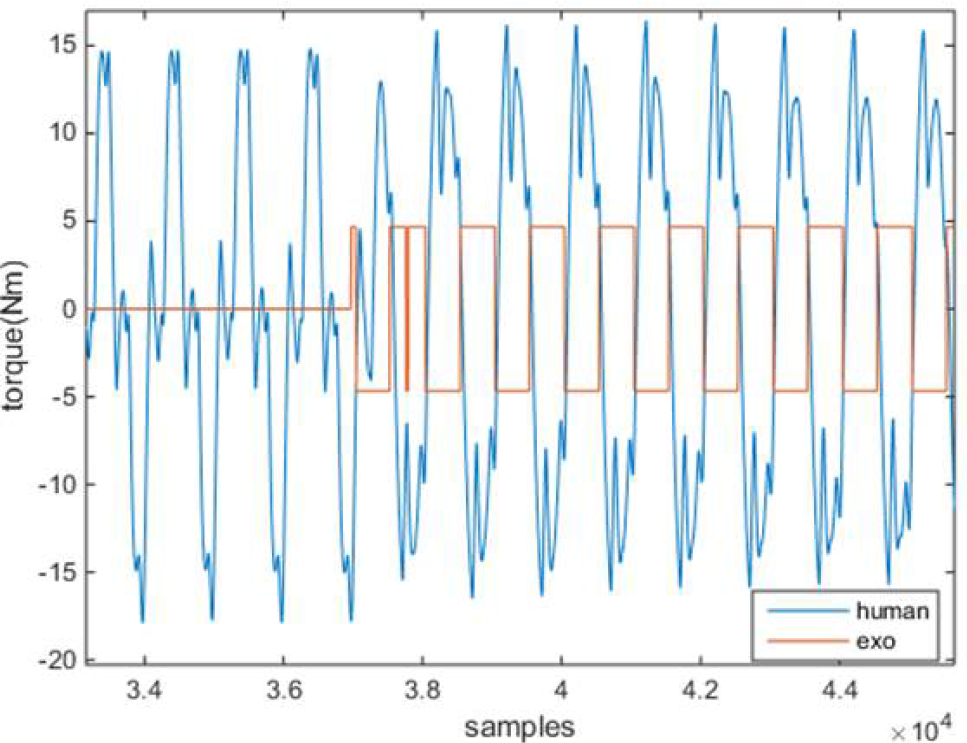
The torque being produced by the exoskeleton and human motors
To see the torque being produced by the human and the exoskeleton motors, Figure 9 has been produced. As in Figure 8, the exoskeleton torque is zero in the beginning because the exoskeleton is turned off. When the exoskeleton is turned on, it is evident that the human is producing the same amount of torque as before, around ±15Nm, while the exoskeleton is producing up to ±5Nm, which is 30% of the human's. The exoskeleton torque is saturated because it cannot exceed the 30% limit.
3.3. User experiment
After simple modifications, the same experimental set-up was then tested by a human user by attaching the same set-up to the shank of his leg. The user was a healthy adult with a weight of approximately 92kg. Figure 10 shows the simple set-up for user testing.
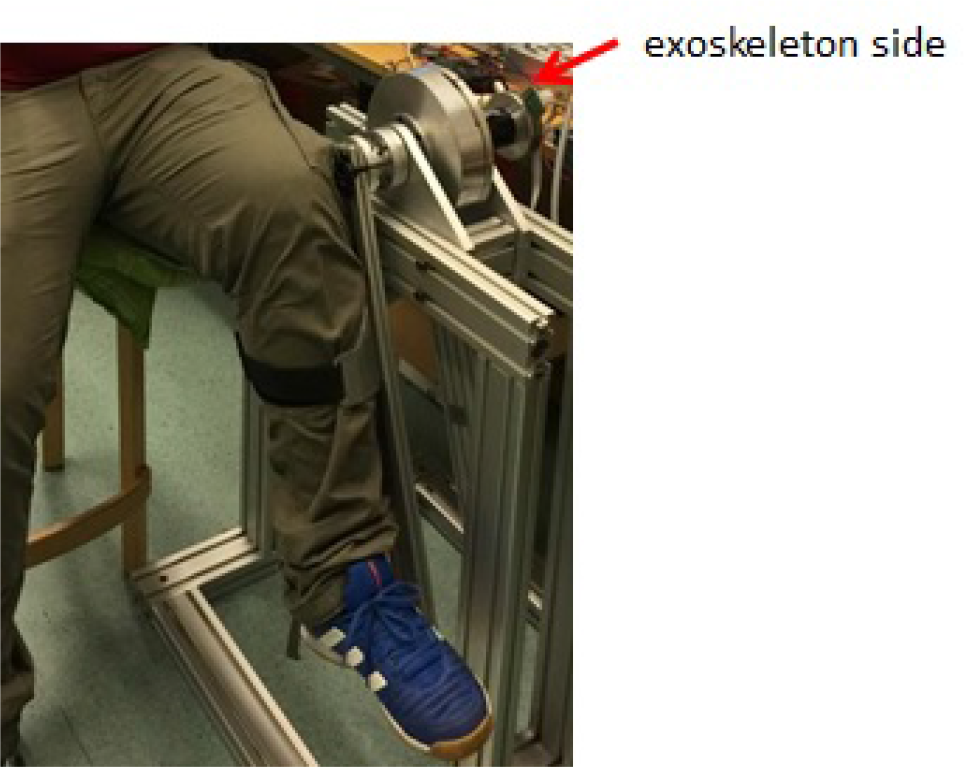
Human user testing the harmonized control method for assistive exoskeletons using a simple single joint exoskeleton-type set-up
Multiple tests were performed with the user. In the first scenario, the user was attached to the exoskeleton but the exoskeleton's power was off and no assistance came from the exoskeleton's motor. In the second scenario, the exoskeleton provided the maximum assistance, approximately 30%, while in the third scenario, the exoskeleton provided a higher rate of assistance (a maximum of approximately 50%). There was no measurement sensor integrated into the set-up to check the torque being produced by the user. However, the force sensors integrated into the set-up provided the force being applied by the human while moving the leg, which shows the extent of the human effort being applied. A virtual position was set, which the human tried to reach in every swing.

The force sensor measurements when the human is testing movement with the exoskeleton switched off, with the exoskeleton providing 30% assistance and with the exoskeleton providing 50% assistance
The results of the three scenarios performed are shown in Figure 11 as the force sensor measurements. As is clear from the figure, the human's effort was reduced when the exoskeleton was on and providing 30% assistance, as compared to when the exoskeleton was turned off. The reduction of effort was between 25 and 30%. When the exoskeleton was providing 50% assistance, however, the reduction in human effort was around 50–60%. The human's speed of the swing was not performed in a controlled environment and hence it varied in trials.
4. Conclusions
This paper proposed a new type of control strategy, called the “harmonized controller”. This controller is designed to provide the user with supplementary physical assistance as needed, to perform the desired motions in a natural and automatic manner. The “harmonized controller” uses a force sensor signal, placed on a human limb such as a thigh, arm, etc., as an error signal to generate a control signal for the exoskeleton actuator system, in order to provide the torque from the exoskeleton to supplement that of the human-exoskeleton system. The error signal is the difference between the joint's current position and the human's desired angular position.
The harmonized control technique in the first phase was tested in a simple simulation environment. The simulation results show that the harmonized control was able to identify the need to supplement energy in the system, the amount of energy to be supplemented and that it was successful in supplementing the energy required. In this case, harmonized control provided up to 30% assistance in the system, which was the maximum allowed in this scenario.
In the next step, experimental tests were performed by developing a specialized single joint test rig mimicking a combined human-exoskeleton knee joint system by using parallel motors at the joint, integrated force sensors and real-time control. Experimental results verified the harmonized control technique and the results obtained in simulations. Harmonized control detected the intention of movement from the human side, weakness in the human side and supplemented the weakness by providing additional torque as needed to achieve the desired motion. The assistance level in these experiments was limited to 30%. Harmonized control was successful in providing the assistance required by the human side.
After simulation and experimental verifications, verification with an actual human was performed in the last phase. The experimental system modified was attached to a human shank as an assistive knee exoskeleton. The human performed a swinging motion with the leg. The harmonized control was tested with both maximum 30% support and maximum 50% support scenarios. As shown in the results, harmonized control detected the human's intention to move, the assistance required by the user, which in the case of healthy users resulted in reduced muscular effort, as shown by the force sensor readings. In both cases of 30% assistance and 50% assistance, harmonized control provided assistance as needed.
The simulation tests and the experimental tests have shown promising results for the newly developed technique, and the harmonized controller was able to supplement the “weakness” of the human muscles by providing assistance via the exoskeleton actuators.
Future work will include further tests with a human to verify the performance of the new control method in terms of comfort for the user and long-term use, and for verification of the harmonized control method with a Multi-DOF active exoskeleton. An exoskeleton prototype is being developed to test the multi-DOF active exoskeleton scenario with a human wearer. The technique has also been protected as intellectual property.
Footnotes
5. Acknowledgements
The research is part of the EXO-LEGS project, which is funded by the AAL (Ambient Assistive Living) program of the EU.