
Abstract
A decentralized four-dimensional (4D) trajectory generation method for unmanned aerial vehicles (UAVs), which uses the improved intrinsic tau gravity (tau-G) guidance strategy, is presented in this paper. Based on general tau theory, the current tau-G strategy can only generate the 4D trajectory with zero initial and final velocities, which is not appropriate for decentralized applications. By adding an initial velocity to the intrinsic movement of tau-G strategy, the improved tau-G strategy can synchronously guide the position and velocity to the desired values at the arrival time. In our decentralized 4D trajectory generation method, the improved tau-G strategy is used to plan the 4D trajectories for UAVs. To deal with environmental uncertainty and communication limitations, the receding horizon optimization driven by both sampling time and conflict events is utilized to renew trajectory parameters continually. The simulation results of challenging time-constrained tasks demonstrate that the proposed method can efficiently provide safer and lower-cost 4D trajectories.
Keywords
Introduction
In cooperative missions of UAVs, such as simultaneous attack [1] and formation aggregation [2], the members of a UAV group need to arrive at the prescribed destination simultaneously or sequentially. 4D trajectory generation, which adds the time dimension into the three-dimensional (3D) trajectory and accurately controls the arrival time at each waypoint, can dramatically lower trajectory uncertainty and reliably accomplish the time-critical tasks.
Compared with a great number of works on 4D trajectory generation in civil aviation, limited research for UAVs is available in recent literature. As the trajectories for aerobuses are often retrieved from the flight database and planned long in advance, they are inappropriate for UAVs to cope with complex missions and online replanning. The existing 4D trajectory generation methods in UAV fields include tensor field guidance [3], the Bezier polynomial function [4], the method based on the one-at-a-time strategy [5] and the Multistep A* algorithm [6]. However, to meet the arrival time, many approaches adopt speed assignments after planning flyable 3D trajectories. Without considering speed dynamics, these assignments will lower the flyability of trajectories. Furthermore, it is difficult to optimize some complicated trajectory descriptions for multiple UAVs. In the end, most of the methods in the literature are centralized ones, which require global knowledge of the multi-UAV system and lots of time for optimization.
Recently, researchers have found that the 4D trajectory generation, based on the bio-inspired general tau theory, can overcome the drawbacks of the existing approaches. General tau theory, based on the action principle of the optical tau variable in animal movements [7–9], is proposed, while several tau guidance strategies are designed to utilize the bionic knowledge of the tau variable in trajectory generation. Exactly at the desired arrival time, tau strategies can synchronously plan the time-variant position and velocity, while considering the transient process of speed regulation. Hence, tau strategies can provide more accurate and flyable guidance for UAVs. Meanwhile, the succinct form of the tau strategy-based trajectory will benefit optimization for multi-UAVs. Reference [10] was the first to use general tau theory in 4D movement guidance of an octocopter, while more test results were stated in [11]. New Mexico State University applied tau strategies to guide a quadrotor perching as a bird [12] and generate a 4D trajectory for point-to-point movement [13]. In the case of multiple UAVs, reference [14] firstly proposed a multi-UAV 4D trajectory generation method based on tau theory. This method uses the intrinsic tau-G guidance strategy to describe 4D trajectories, formulate a centralized trajectory planning problem and solve the problem by particle swarm optimization (PSO). Reference [15] proposed the tau harmonic (tau-H) guidance strategy, which was used in centralized trajectory generation for UAVs. As the tau-H strategy has a stronger trajectory shape adjustment capability, the trajectory generation achieves a better conflict resolution performance.
However, to the best of our knowledge, tau strategies have not been used in decentralized applications of multi-UAVs. This is because the online planning of trajectories in decentralized tasks always need to cope with the movements starting or ending with non-static motion states. However, existing tau guidance strategies cannot perform well in the guidance of movements with non-zero initial and final velocities, especially when the UAV is initially going further away from the destination. This drawback tremendously limits the further use of tau strategies in cooperative missions, such as formation flight with a virtual structure and persistent tracking of moving targets.
The main contribution of this paper is two-fold. Firstly, to meet the requirement of decentralized 4D trajectory generation for UAVs, an improved intrinsic tau-G strategy is proposed. By adding an initial velocity to the intrinsic movement of the original tau-G strategy, the improved tau-G strategy can synchronously guide both position and velocity to meet their expectations exactly at the desired time. Therefore, the 4D trajectories generated by the improved tau-G strategy can guide the movement starting or terminating with non-static motion states, even the position gap is initially expanding. Secondly, in order to solve the challenging 4D trajectory generation problem for multi-UAVs, a comprehensive decentralized 4D trajectory generation method is designed. In particular, this method uses the improved tau-G strategy to generate 4D trajectory for every vehicle, detects conflicts by a geometric approach, which is based on the protected airspace zone (PAZ) [16], and formulates a decentralized optimization problem for 4D trajectory generation. Decentralized receding horizon optimization (DRHO), which has not been used in 4D trajectory generation, is applied in order to obtain the optimal trajectories. To deal with environmental uncertainty, DRHO is driven not only by time-sampling, but also conflict events. The dynamics simulation results show that our decentralized trajectory generation method can efficiently provide safer and lower-cost trajectories for UAVs.
The remainder of this paper is structured as follows. In Section 2, the decentralized 4D trajectory problem for multi-UAVs is stated. In Section 3, we present the improved tau-G strategy, analyse its validity and calculate the extreme velocity during guidance. Then, the whole decentralized 4D trajectory generation method is described in Section 4, while Section 5 presents the simulation results and analysis in contrast with decentralized model predictive control (DMPC). Finally, we draw a conclusion in relation to our trajectory generation method.
Problem Statement
The problem considered in this paper is to generate optimal 4D trajectories for a decentralized multi-UAV system consisting N homogeneous vehicles. The 4D trajectory of the ith UAV is described by the time-variant movement states S
i
(t)={x
i
(t), y
i
(t), z
i
(t), ẋ
i
(t), ẏ
i
(t), ż
i
(t)}, in which (x
i
, y
i
, z
i
) is the position in the north-east-down frame. For simplicity, the orientation of UAV can be omitted in trajectory generation and considered in trajectory tracking. The trajectory can guide the UAV moving from the arbitrary initial states

The velocities along each coordinate axes
Defining the communication topology as the edge-weighted directed graph changes along with the movements of UAVs. In the graph, the vertices depict the positions of UAVs, while the directed edge e
ij
in edge set

In this problem, a ij =a ji ⩽0. The notation R safe refers to the radius of PAZ, which is the minimum safe distance between UAVs. R c is the valid communication distance. When the distance between UAVi and UAVj meets the condition d ij ⩽R c (i, j = 1… N), valid communication can be established. The two UAVs are referred to as neighbours of each other.
Next, the Laplacian matrix [17]

As the decisions of the nearer UAVs should be considered preferentially in order to avoid potential conflicts, the non-negative edge weight l ij indicates the influence of UAVi upon the trajectory generation of UAVj.
The architecture of the decentralized 4D trajectory generation is shown in Figure 1. In the decentralized system without a central planning unit, the vehicles exchange their movement states
The optimization problem of the whole system is divided into N local problems, which will be solved by every vehicle according to its own states and the information of its neighbours. The local optimal objective is to find the feasible parameters, with minimum cost, for the 4D trajectory constrained by simultaneous arrival, being collision-free, maximum velocity etc. The whole multi-UAV system is organized and coordinated through the task objective and constraints. This decentralized optimization problem is detailed in Section 4.2.

Decentralized 4D trajectory generation architecture of multi-UAV system
Overview of existing tau guidance strategies
General tau theory [18] is put forward based on the research relating to the bio-inspired tau theory [19]. In general tau theory, the tau variable represents the time-to-contact (TTC) of the goal-directed movement, which can guide the UAV to close the gaps between current motion states and the goals. The tau variable is defined as follows:

in which the motion gap χ can be the gap of any state in
According to tau-D strategy, if a UAV needs to stop at the destination on time, it should retain a derivative of the tau variable

in which χ0 and
If the tau variables of different motion gaps maintain a non-zero constant ratio k during the closing process, these gaps will be closed synchronously. Ratio k is called the coupling coefficient. Taking the two motion gaps χ and μ as an example, by solving τχ=kτμ, the relation between the states of the two movements is obtained as follows:

If k ∈ (0, 0.5), (χ,
To avoid external disturbance, μ in the tau coupling strategy can be designed as a virtual movement called the intrinsic movement. In tau-G strategy, the intrinsic movement gap is a free fall motion represented by G(t)=g(T2-t2)/2. If the gap χ maintains appropriate ratios with τ
G
, χ will be closed at the desired arrival time T. By solving τχ=kτ
G
, χ,
As with tau coupling strategy, if k ∈ (0, 0.5), (χ,
The tau-J guidance strategy uses the constant jerk motion gap J(t)=j(T3- t3)/6 as the intrinsic movement [13]. The letter j refers to the constant jerk. The relations between movement states and the k value and the applications of this strategy are the same as tau-G strategy.
Tau-H Strategy
Utilizing the harmonic motion H(t)=H0 [sin(2πt/T)/(2π)-t/T+1] as the intrinsic movement gap, if the coupling coefficient k ∈ (0, 1], tau-H strategy [15] can accomplish (χ,
Above all, these existing tau guidance strategies cannot be ideally applied to the tasks of decentralized trajectory generation, including velocity regulation, goal-directed movement with
Improved tau-G strategy
Improvement of tau-G strategy
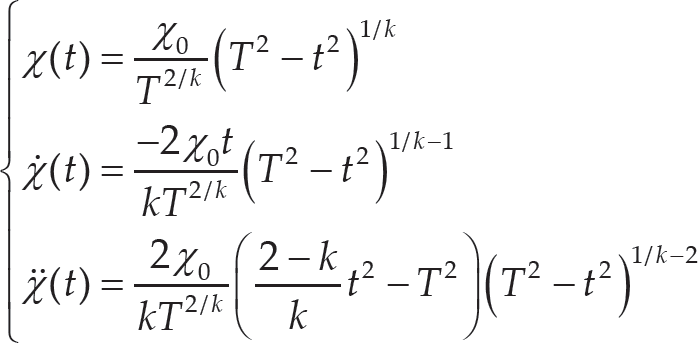
In this section, the improved tau-G strategy is proposed to overcome the deficiencies of the existing strategies. According to

in which G0 refers to the initial intrinsic gap.
When taking the movement along the x-axis from time 0 to T as an example, the position gap is Δx= x T -x, and the velocity gap is Δẋ =ẋ T -ẋ, in which x T and ẋ T denote the goal states at time T. According to the tau coupling strategy in Eq. (6), the velocity ẋ is defined as follows:
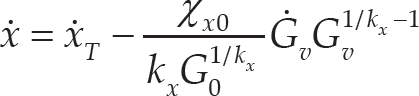
It is important to note that χx0=ƒΔẋ(t)dt |t=0 is not equal to the initial position gap Δx0, as ẋ T may not be zero. Integrating ẋ and taking the terminal position x T into account, the movement states can be expressed as follows:

Substituting G v for Eq. (10), one can yield χx0=x T -x0-ẋ T T and V G =k x Δẋ0G0/χx0, in which Δẋ0 is the initial velocity gap. Then, by taking the expressions of χx0 and V G into G v (t), as shown in Eq. (8), G0 and V G are calculated as follows:

As such, G0 and V
G
can be seen as the bond between the actual and intrinsic movements. Analysing the movement states in Eq. (10), the final movement states depending on k
x
are shown in Table 1. If k
x
∈ (0, 0.5), (χ,
Relations between final movement states and k x , guided by the improved tau-G strategy
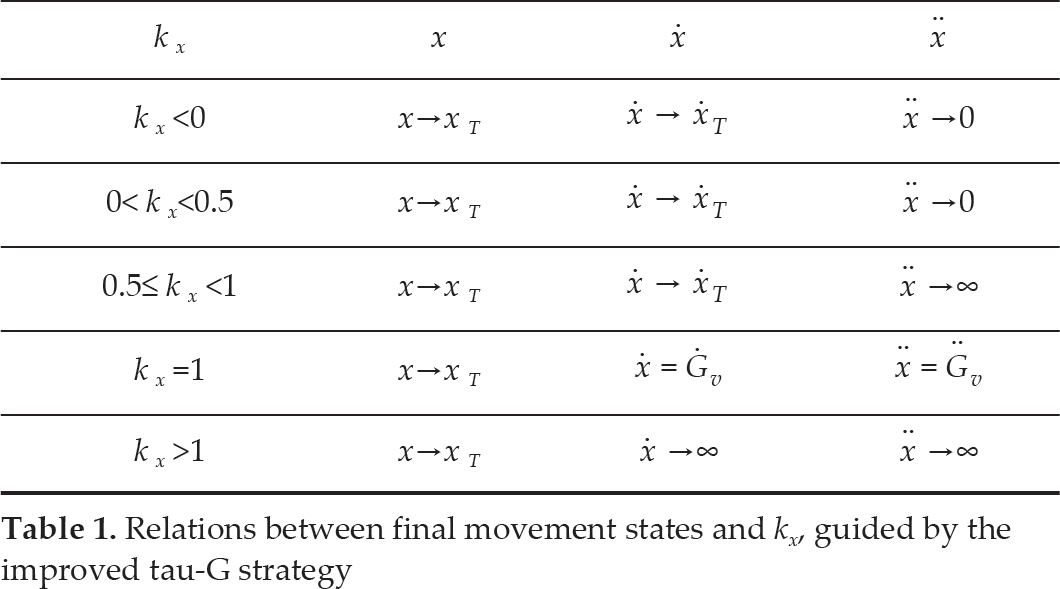
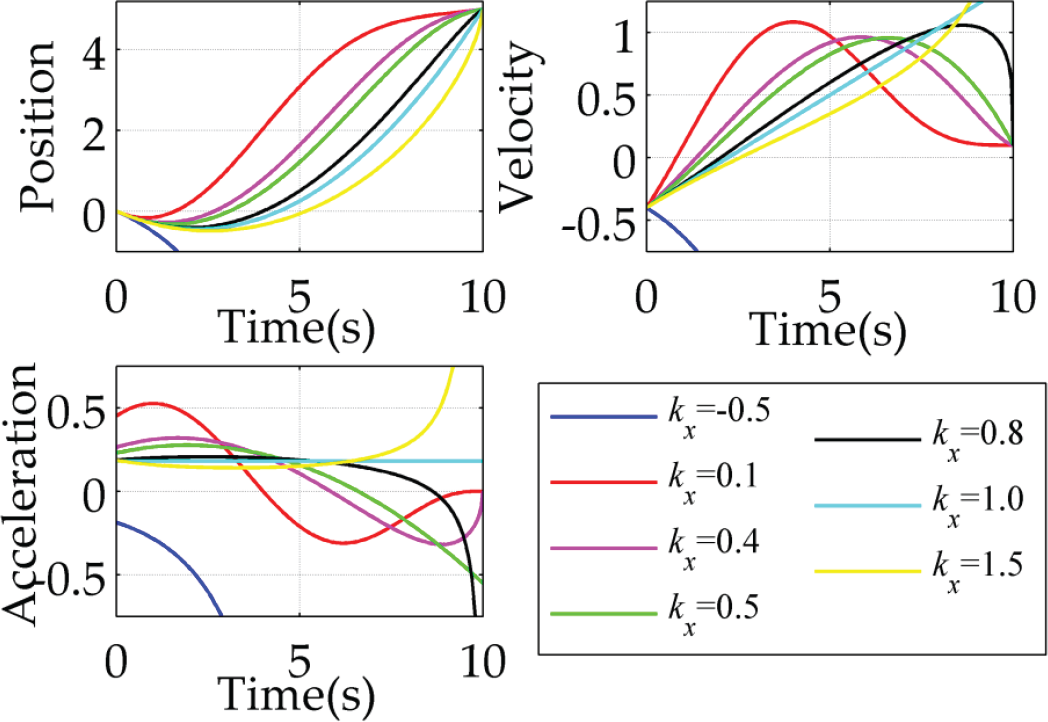
Figure 2 displays the relations between (x, ẋ, ẍ) and k x , guided by our improved tau-G strategy. This task, with x0=0, x T =5, ẋ0 =-0.4, ẋ T =0.1 and T=10s (τ 0x>0), cannot be finished by any of the existing tau strategies. For curves k x =0.1 and k x =0.4 when t→T, (x, ẋ, ẍ)→(5,-0.4,0).
Figure 3 shows the performance comparison between the improved tau-G strategy and tau-D strategy in two breaking tasks. The improved tau-G strategy performs well in two tasks, while the tau-D strategy fails to guide the closure of the gap with τ0x>0. Additionally, if τ0x/T>k x (k x =0.2), the gap with τ0x<0, guided by tau-D strategy, is not exactly closed at time T. Therefore, for the definite task, k x of the tau-D strategy does not make any allowance for optimization. These results indicate that our improved tau-G strategy can guide the motion with initial and final velocities to the expected states, even when the position gap is initially expanding (τ0x>0). Meanwhile, in the tasks with ẋ0 =0 and ẋ T =0, the initial velocity V G of G v (t) equals zero. The improved tau-G strategy is the same as for the original tau-G strategy. The comparison of all tau guidance strategies and their applications is summarized in Table 2. Above all, the drawbacks of the existing tau strategies can be overcome by our improved tau-G strategy.
Relations between the movement states and k x values with τ0x>0

Comparison between the improved tau-G strategy and tau-D strategy in breaking tasks
In the 4D movement guidance of a UAV, the following content should be noted in order to insure the validity of the improved tau-G strategy:
According to the expressions of G
0
and V
G
in Eq. (11), k
x
= -χx0 / (Δẋ0T) is the singularity in which G0 and V
G
are invalid. If χx0/Δẋ0<0 and -χx0 / (Δ ẋ0T) <0.5, the singularity will appear in the value range of k
x
. At the singularity, V
G
=-G0/T, the intrinsic movement G
v
as shown in Eq. (8), turns into a uniform rectilinear motion as follows:

This motion can be used as the intrinsic movement at the singularity.
In terms of Table 1, if k
x
∈ (0, 0.5), x, ẋ and ẍ approach their desired value when G(t)→0. To enable the gap to close exactly at the arrival time T, the function G(t)=0 should have the unique solution t=T in the time range (0, T]; otherwise, the gap will be closed in advance. Solutions of G(t)=0 are calculated as follows:

To ensure that t1=T is the unique solution, t2 should meet t2 ∈(-∞, 0]∪[T, ∞), which is equivalent to k
x
Δẋ0T/χx0⩾-
Summary of tau guidance strategies

As the maximum velocity constraint is necessary in 4D trajectory generation, the velocity extremum conditions of our improved tau-G strategy need to be analysed.
When χx0=0, ẋ equals ẋ0 all the time. Therefore, the velocity extremum ẋ ex does not exist.
At the singularity χx0=-k x Δẋ0T, if Δẋ0≠0, ẍ(t)≠0 in the period of t ∈ (0, T). Hence, there is no extreme velocity.
In other conditions, by solving ẍ (t)=0, the time when ẋ
ex
comes out can be yielded as follows:

When considering t1 and t2∈ (0, T), the conditions to justify the extremum of ẋ at t1 and t2 are shown in Table 3.
Extreme velocity conditions at t1 and t2
The expression of ẋ ex at t1 is:

The value of ẋ ex (t1) increases when k x is closer to 0 and the extreme velocity at t2 is ẋ ex (t2)=2ẋ T -ẋ ex (t1). When there is no extreme velocity in the period of (0, T), the maximum velocity will appear at t=0 or t=T.
4D trajectory guided by improved tau-G strategy
In 4D trajectory generation for UAVs, the 3D movements guided by the improved tau-G strategy are:

in which the coupling coefficient set
To achieve the spatial function of the trajectory, Eq. (17) can be rewritten as follows:

Therefore, the 3D shape of the trajectory is determined by the coupling coefficient set

Trajectories generated by the improved tau-G strategy with k x =0.17, k z =0.17 and different k y , in which ‘S’ is the starting point and ‘D’ is the destination
Decentralized optimization problem
In decentralized 4D trajectory generation, the optimization problem is divided into N local problems according to the number of UAVs. For every vehicle, the local problem is independently solved based on its own states and information from its neighbours. When comprehensively considering the trajectory length L i , the conflicts between UAVs and obstacles and the maximum velocity vmax, the objective function of the ith UAV is designed as a weighted sum:

in which l
ij
is the element of the Laplacian matrix,
Since UAVs cannot be regarded as point masses in trajectory generation, an efficiently geometric approach is adopted for conflict detection. In this paper, we assume that every UAV equips the distance sensor with the view range of R
view
. If the obstacles or other vehicles are located in the view range, their nearest points


Spherical PAZ and conflict detection
The objective of the local trajectory generation problem is to find the optimal

The constraints include the trajectory descriptions s(
If the UAVs are initially located beyond the communication range, the 4D trajectories generated without information from neighbours cannot ensure flight safety. Meanwhile, the states of moving targets, the environment and the communication topology are time-variant. Hence, the DRHO method is applied in order to renew the trajectory parameters step by step to correct the errors repeatedly [21].
The decentralized 4D trajectory generation method, based on the improved tau-G strategy and DRHO (I-tau-G-DRHO), is shown in Algorithm 1. At the beginning, every UAV initializes the coupling coefficient set

To improve the response capacity to emergencies, DRHO is driven not only by the sampling time, but also the conflict events. In the conflict event-driven mechanism, a conflict detection module works at a higher frequency than time sampling. If Eq. (20) is fulfilled, this module will raise an alarm. At every sampling instant or event alarm, I-tau-G-DRHO will firstly check the target states and conflict events. If the states of target have changed or any potential conflict has happened, the reoptimization procedures will be executed. In particular, if receding optimization happens on one UAV, its neighbours will also go into the replanning process in order to achieve optimal decisions for the group. This replanning mechanism not only lowers the computation load, but also keeps enough capability to deal with environmental uncertainty.
In replanning, I-tau-G-DRHO calculates the 4D trajectories of neighbours, solves the local optimization problem in Eq. (21) to yield optimal

As there is great difficulty in obtaining an analytical solution for the local optimization problem in Eq. (21), the numerical computation algorithms should be adopted. The commonly used algorithms include sequential quadratic programming (SQP) [22], PSO [23] and mixed integer linear programming (MILP), which is solved by CPLEX [21]. Since the 4D trajectory generated by the improved tau-G strategy is continuous, SQP and PSO are carried out in order to solve decentralized 4D trajectory generation cases for the purpose of comparison.
In these cases, 10 UAVs cooperatively set off from their starting points, pass a common middle point sequentially and arrive at the static target at time T. The error tolerance is ɛ=10−3, the PSO algorithm has 10 particles and each algorithm can iterate 100 times at most in one local optimization. Table 4 shows the average time cost for solving a local problem (
Optimization performance comparison between SQP and PSO

In this section, a comprehensive simulation is carried out in order to demonstrate the performance of the I-tau-G-DRHO method. Since there is no benchmark for 4D trajectory generation in a multi-UAV system [24], we have designed a convincing simulation scenario where five homogeneous UAVs cooperatively generate 4D trajectories for a series of tasks in an urban area. Table 5 details these coordinated tasks. The simulation tasks mainly include formation aggregation and tracking moving targets. In formation aggregation, each UAV needs to generate two trajectories: firstly, to cross the middle point at the expected speed, and then to arrive at the aggression position on time. Next, the UAVs follow the virtual moving targets to finish the tasks, including regulating velocity, changing formation, circling the building etc.
Main tasks of the simulation

Main tasks of the simulation
For the simulation to have a definite practical meaning, a published kinematics and dynamics model of a quadrotor UAV [25] is selected in order to execute 4D trajectories. As the safe separation between UAVs is 1m, the radius of the PAZ is set as R safe =1.5m, considering the tracking errors. The sampling time for DRHO is 0.5s. To visualize the simulation results, a 3D urban scenario with five UAVs are designed by the MATLAB Virtual Reality Toolbox, as shown in Figure 7, while these buildings are treated as cuboids and cones, as shown in Figure 8, for obstacle avoidance. Figure 8 also shows the spatial tracking results of the 4D trajectories provided by I-tau-G-DRHO. A video of this simulation can be found at https://www.youtube.com/watch?v=HDbNXdvlG1g.
Formation shapes of five UAVs: (a) triangle formation and (b) linear formation

Visualized 3D urban scenario and UAVs

Shapes of buildings for collision detection and tracking results of trajectories given by I-tau-G-DRHO. The solid points are the starting positions of each UAV and the dotted rectangles are zoomed-in to show the formation more clearly.
The existing decentralized path-planning methods for a multi-UAV system include the artificial potential field [26], the consensus-based algorithm [27], decentralized overlapping control [28], DMPC [29] and so on. With the advantages of low computation load, good flexibility and strong capability when dealing with environmental uncertainty, DMPC has been widely studied in relation to the applications of multi-UAVs, such as conflict-free trajectory planning [29], formation flight control [30], encirclement of a target [31] etc. The comparison with DMPC can fully verify the validity and performance of our I-tau-G-DRHO method. In the simulation executed by DMPC, the prediction horizon is N p =5, the control horizon is N c =3 and the receding period is 0.5s. All of the simulations are designed by MATLAB/Simulink R2013a and finished with the use of a laptop with a 2.6GHz Core i5-3230M CPU and 4GB of RAM.
Formation aggregation can examine the capabilities of conflict resolution, obstacle avoidance and the 4D guidance capacity of positions and velocities. Table 6 shows the performance during the aggregation process, in which
Mean receding optimization number, mean position and velocity errors during formation aggregation

Mean receding optimization number, mean position and velocity errors during formation aggregation
The conflicts between the most dangerous UAV and others in the aggregation process are shown in Figure 9. As the most dangerous vehicle of the two methods is different (UAV5 of I-tau-G-DRHO and UAV1 of DMPC), hence the distance curves of the two subfigures change in a different way. According to this figure, I-tau-G-DRHO safely guides UAVs to their arrival at the targets. As for trajectories generated by DMPC, UAV1 collides with its neighbour near the middle point. Considering the distance between UAVs, the triangle formation of I-tau-G-DRHO is aggregated exactly at the arrival time T=91s. However, DMPC guides the UAVs that are approaching the aggregation positions in advance and hovering there. Hence, the goal velocities are not achieved by DMPC.

Distance between the most dangerous UAV and others in formation aggregation: (a) UAV5 of I-tau-G-DRHO and (b) UAV1 of DMPC

Tracking results of UAV1 in formation aggregation
Figure 10 shows the 3D tracking results of the trajectories in formation aggregation. The tracking of the trajectory guided by I-tau-G-DRHO is much smoother than that of DMPC.
Collisions with buildings, which are shown in Figure 11, are identical to the results in Figure 9. The I-tau-G-DRHO method ensured the safe flight, while the UAV4 guided by DMPC collided with buildings.

Horizontal distance between UAVs and buildings in formation aggregation: (a) I-tau-G-DRHO and (b) DMPC
The moving target tracking paths of the UAV group are shown in Figure 8. As all UAVs keep a safe distance from neighbours and buildings in these tasks, the safety results are not shown in this paper. Figure 12 shows the mean cost ratio between the 4D trajectories generated by I-tau-G-DRHO and DMPC in tracking moving targets. The cost function is shown in Eq. (19). On average, the cost of trajectories generated by I-tau-G-DRHO is 16.8% lower than that of DMPC. For the whole simulation tasks, including formation aggregation, the cost of trajectories generated by I-tau-G-DRHO is 18.1% lower.

Mean cost ratio between the trajectories generated by I-tau-G-DRHO and DMPC in tracking moving targets
Table 7 shows the mean normalized position error
Mean position and velocity errors during formation maintenance

The statistical data of the performance during the whole simulation process is shown in Table 8. The time consumption
Performance comparison of the whole simulation (the notation ‘-’ means these data cannot be produced)
Performance comparison of the whole simulation (the notation ‘-’ means these data cannot be produced)
The simulation results and the analysis above have presented comprehensive demonstrations of the performance of I-tau-G-DRHO. This proposed method obviously performs better than DMPC in the 4D position and velocity guidance, as well as safety of the task execution. Meanwhile, I-tau-G-DRHO can generate 4D trajectories with a visibly lower cost in less time.
In this paper, we propose an improved tau-G strategy based on the bio-inspired general tau theory, as well as design a decentralized 4D trajectory generation method for multi-UAVs (I-tau-G-DRHO) utilizing the proposed strategy. The main work of this paper is stated as follows:
Based on general tau theory, an improved tau-G strategy is proposed. The 4D trajectory generated by this strategy can guide both position and velocity towards the desired values at the arrival time. Furthermore, our improved tau-G strategy plays well with the initially expanding position gap (τ0x>0), which cannot be achieved by any existing tau strategies. This improved strategy will enlarge the applications of the bio-inspired tau theory in UAV fields.
Using the improved tau-G strategy, a decentralized 4D trajectory generation method is designed for multi-UAVs. The parameters of the 4D trajectories are repeatedly corrected by a receding horizon optimization approach. To cope with environmental uncertainty and communication limitation, an event-driven mechanism is added to the receding optimization.
To demonstrate the effectiveness of the improved tau-G strategy and the I-tau-G-DRHO method, a comprehensive simulation and a visualized scenario are designed based on the MATLAB Virtual Reality Toolbox. The computation load, conflict resolution and the ability of tracking a moving target have been validated by the simulation. The comparison with DMPC shows that I-tau-G-DRHO can efficiently provide safer and lower-cost 4D trajectories.
Our future work will concentrate on performing more tests for the performance of I-tau-G-DRHO. Moreover, new tau guidance strategies should be designed in order to generate 4D trajectories with better features, which can extend the applications of general tau theory.
Footnotes
Acknowledgements
This work is supported by the National Natural Science Foundation of China under grant no. 61004066 and the Zhejiang Provincial Natural Science Foundation of China under grant no. LY15F030005. Our thanks also go to Mr. Corke from the Queensland University of Technology for his dynamics model of the quadrotor.