
Abstract
A humanoid manipulator produces significantly reactive forces against a humanoid body when it operates in a rapid and continuous reaction environment (e.g., playing baseball, ping-pong etc.). This not only disturbs the balance and stability of the humanoid robot, but also influences its operation precision. To solve this problem, a novel approach, which is able to generate a minimum-acceleration and continuous acceleration trajectory for the humanoid manipulator, is presented in this paper. By this method, the whole trajectory of humanoid manipulation is divided into two processes, i.e., the operation process and the return process. Moreover, the target operation point is considered as a particular point that should be passed through. As such, the trajectory of each process is described through a quartic polynomial in the joint space, after which the trajectory planning problem for the humanoid manipulator can be formulated as a global constrained optimization problem. In order to alleviate the reactive force, a fitness function that aims to minimize the maximum acceleration of each joint of the manipulator is defined, while differential evolution is employed to determine the joint accelerations of the target operation point. Thus, a trajectory with a minimum-acceleration and continuous acceleration profile is obtained, which can reduce the effect on the body and be favourable for the balance and stability of the humanoid robot to a certain extent. Finally, a humanoid robot with a 7-DOF manipulator for ping-pong playing is employed as an example. Simulation experiment results show the effectiveness of this method for the trajectory planning problem being studied.
Keywords
1. Introduction
The trajectory planning of a humanoid manipulator is a fundamental research issue in humanoid robotics and is very important for robots serving the human[1, 2]. As for the trajectory planning problem of the manipulator, there are two different methods to solve this: one is Cartesian space planning and the other is joint space planning. Since each of the path points in the Cartesian space ought to be mapped into a set of joint angles, with these sets of joint angles interpolated with smooth functions within all the kinematic constraints of the manipulator[3], Cartesian space planning should involve a large amount of inverse kinematics computation[4].
As for a humanoid manipulator in a rapid and continuous reaction environment for high-speed objects, the goal assignment is that, in a given time, the end effector of the manipulator is moved from the static initial point to the target operation point with a required Cartesian speed to operate the target object, and then returns to the static initial point preparation for the next target operation[5, 6]. Due to the rod shape and the mechanism design, each joint of the humanoid manipulator has its own position constraint. Moreover, the manipulator's mechatronics system is limited by the size of its actuators, so the manipulator also has its joint velocity and acceleration limitation[3]. Hence, the trajectory of the manipulator should be planned within all the kinematic constraints (joint position, velocity, acceleration etc.); otherwise the planned trajectory cannot be achieved[7, 8]. Over the last couple of decades, many researchers have made efforts to address the relevant constraints problems. Wang et al. presented a smooth, minimum-acceleration trajectory planning (MATP) method within the velocity and acceleration constraints of a humanoid robot, which can find MATP from the arbitrary initial state to the arbitrary target state within a determined time frame[3]. Chan and Dubey used a weighted least-norm solution to avoid joint limits for redundant joint manipulators in order to guarantee joint limit avoidance and minimize unnecessary self-motion comparison with the gradient projection method[9]. Xiang et al. presented a general weighted least-norm (GWLN) method for the control of redundant manipulators, in which an experiment on the 7-DOF redundant manipulator illustrated that it can both guarantee the obstacle-free zone and not violate the joint limits in contrast to the directional gradient projection method[10]. The approach taken by Piazzi and Visioli, who developed a new approach based on interval analysis in order to find the global minimum-jerk trajectory of a robot manipulator within a joint space scheme, successfully exploited a variety of real automation settings[11].
Despite the aforementioned research, little has been done to deal with the operation problems of a humanoid robot in a rapid and continuous reaction environment. Ren et al. have proposed a trajectory planning method for a 7-DOF humanoid manipulator in a rapid and continuous reaction and obstacle avoidance environment, in which the employed method served to solve the trajectory planning problem of the humanoid manipulator for ping-pong playing [5]. However, this work did not consider the impact on the humanoid body as a consequence of the humanoid manipulator being subject to a rapid operation. Due to the dynamic coupling between the humanoid manipulator and the humanoid body (or unfixed base), the humanoid manipulator should produce a great reactive force against the body, especially when the manipulator operates rapidly in relation to high-speed objects. The reactive force against the humanoid body not only disturbs the balance and stability of the humanoid robot, but also significantly influences the operation precision of the humanoid manipulator. Hence, discovering how to alleviate the reactive force against the humanoid body ought to be considered when planning the motion trajectory of the humanoid manipulator.
With regard to the reactive force against the humanoid body, the acceleration of the manipulator's movement trajectory should be a critical factor that essentially disturbs the humanoid body, while a minimum-acceleration trajectory is favourable for keeping the balance and reducing its impact on the humanoid body[3, 12]. The continuity of acceleration is another important factor that influences the disturbance of the manipulator to the humanoid body. A discontinuous acceleration trajectory might cause the manipulator system to produce a hidden vibration during the rapid movement process of the manipulator, which not only seriously harms the humanoid manipulator, but also disturbs the humanoid robot greatly[12]. Generally, trajectory optimization is achieved by minimizing a suitable performance index on the basis of satisfy the assignment requirement within all the kinematic constraints. As such, the acceleration of the trajectory has been considered as a performance index for a humanoid manipulator operating in a rapid and continuous reaction environment. In this paper, a trajectory optimization method for a humanoid manipulator, based on differential evolution (DE), is presented in order to alleviate the reactive force against the humanoid body. It divides the whole trajectory of the humanoid manipulation into two stages, i.e., the operation process and the return process, with the target operation point being a particular point that should be passed through. Moreover, a quartic polynomial is adopted in order to interpolate these two processes in the joint space to maintain the continuous acceleration trajectory. In addition, a fitness function that aims to minimize the maximum acceleration of the trajectory is constituted, while the joint acceleration values at the target operation moment are determined through DE. By obtaining a trajectory with a minimum-acceleration and continuous acceleration profile, this approach method is more efficient for the trajectory planning problem.
2. Problem Description
For a robot system, the movement trajectory of this robot can be denoted by the change relationship
With reference to an n -DOF manipulator of the humanoid robot, suppose that the joint position of the static initial point is denoted by

subject to



where

where
3. Motion Planning Strategy
As shown in Figure 1, when the manipulator operating in a rapid and continuous reaction environment, the whole trajectory is connected by two segments. The target point is given as a particular point that should be passed through between the operation process and the return process. Given that each segment is a point-to-point trajectory planning problem, the trajectory of the manipulator can be planned in the joint space.
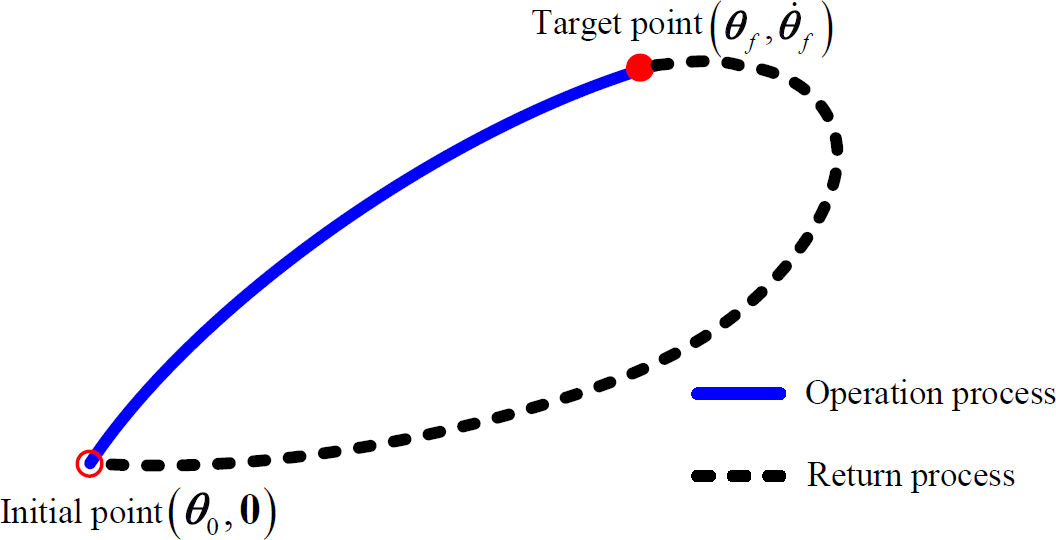
The operation process and the return process of the trajectory of the humanoid manipulator, where the solid line denotes the operation process and the dotted line represents the return process
According to the boundary conditions in formulae (2) and (3), Ren et al. adopted a cubic polynomial to interpolate these two processes[5]. However, this planning strategy ought to produce a discontinuous point of the acceleration trajectory at
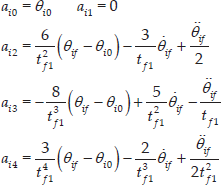
At the stage of the operation process, the manipulator moves from the static initial point to the target operation point at

where

Hence, the five unknown constants can be solved as:
At the stage of the return process, the manipulator returns to the static initial position from the target operation position at the
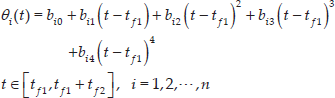
where
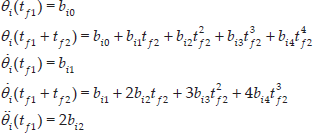
From these, we can determine that the five unknown constants are:

As formulated above, the total parameters that need to be determined concern the joint acceleration of the target operation position at the
4. Trajectory Optimization Based on Differential Evolution
4.1. Differential evolution
DE is a population-based intelligent search approach that solves the optimization problem through individuals' cooperation and competition[14]. In each iteration, DE implements differential mutation and crossover operators on the current population in order to produce a temporary population, and then employs a greedy selection procedure among the two populations in order to choose the best one-to-one.
For an n -dimensional optimization problem, suppose the population size is m, in which case the DE/best/1/bin mutation operator is performed on the current individual

where
where
where
4.2. Optimization scheme of the trajectory
The rapid movement of the humanoid manipulator disturbs the balance and stability of the humanoid robot; meanwhile, the imbalance of the humanoid body influences the operation precision of the manipulator end-effector. Since the trajectory acceleration is an important factor for reducing its disturbance to the humanoid body in humanoid manipulator systems, an optimum trajectory with minimum-acceleration and continuous acceleration properties should be selected.
As mentioned previously, n parameters should be optimized for an n-DOF humanoid manipulator, that is

Trajectory optimization of an n -DOF humanoid manipulator based on DE
In order to select an optimum trajectory of the humanoid manipulator for high-speed objects using DE, the fitness function of the DE algorithm ought to be determined. According to the optimization goal and request of formula (1), the fitness function of the DE algorithm can be defined as follows:

where

then the constraint handling technique should be employed to punish the fitness value of the corresponding individual in DE:

where
5. Simulation
To validate the performance of the method proposed in this paper, as shown in Figure 3, a humanoid robot with a 7-DOF manipulator for ping-pong playing is employed as example. The joint structure model of the 7-DOF manipulator is in line with the physiological characteristics of the human arm, such that it has a large working space[17]. A detailed introduction about ping-pong playing with the humanoid robot has been described in [4]. The physical model and joint model of this humanoid manipulator are respectively shown in Figure 4, where

Diagram of a humanoid robot for ping-pong playing
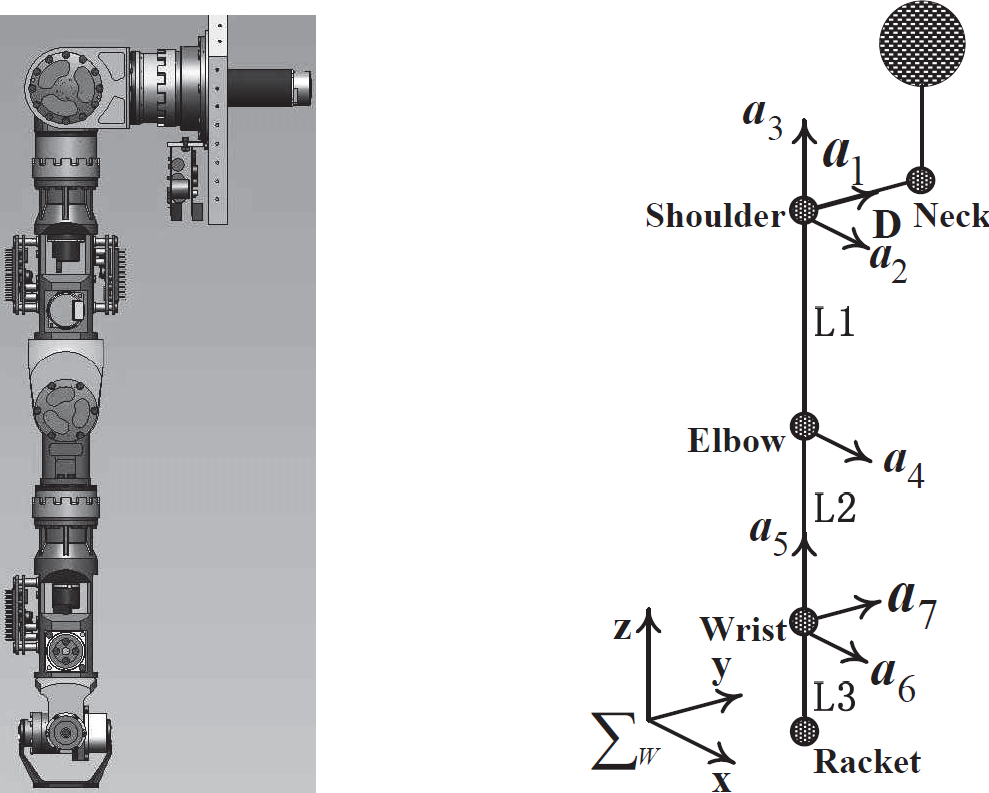
Physical model (left) and joint model (right) of the 7-DOF manipulator
According to the actual mechanism model of the humanoid manipulator shown in Figure 4, the shoulder width is
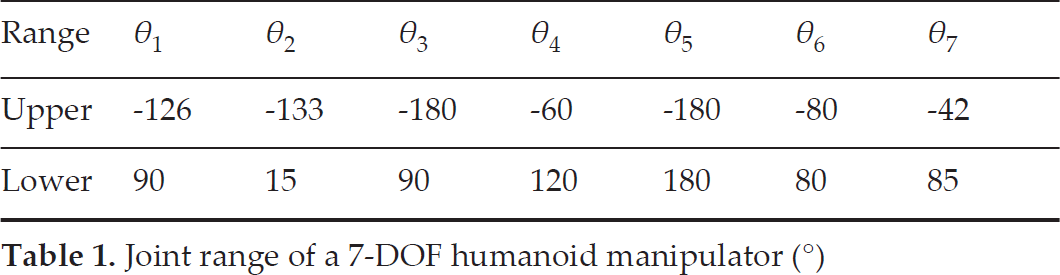
Joint range of a 7-DOF humanoid manipulator (°)
Maximum joint velocity of a 7-DOF humanoid manipulator (rad/s)

Maximum joint acceleration of a 7-DOF humanoid manipulator (rad/s2)

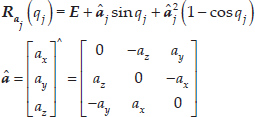
According to the joint model of the 7-DOF manipulator in Figure 4, the unit vectors of the seven joint axes' directions

When defining the joint variables of the humanoid manipulator as a
where
where
The movement of the humanoid manipulator for ping-pong playing includes the operation process and the return process. If the execution time of these two processes are

In light of the forward kinematic model of this humanoid manipulator, the position and orientation of the end effector can be calculated according to the given joint vectors. Through simulation, the rod configuration of the humanoid manipulator at the initial moment (left) and at the target
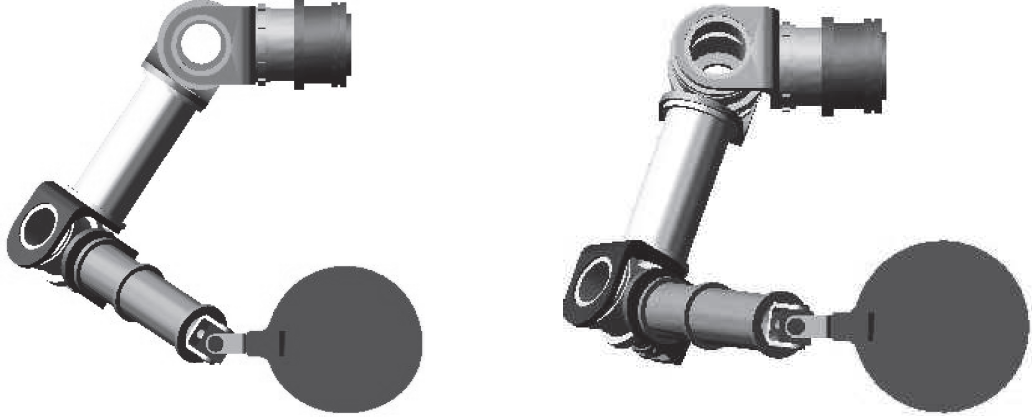
The rod configuration of the manipulator at the initial moment (left) and the target operation moment (right)
In addition, it can be assumed that the boundary conditions of joint velocity are given by:

In other words, the movement speed of the racket
Wang et al. [3] have concluded that smooth MATP is good for reducing disturbance. In order to obtain an optimum trajectory with minimum-acceleration and continuous acceleration properties, the DE method is adopted so that the optimization variables of the trajectory can be determined, i.e., the joint acceleration vector

where the corresponding fitness value is
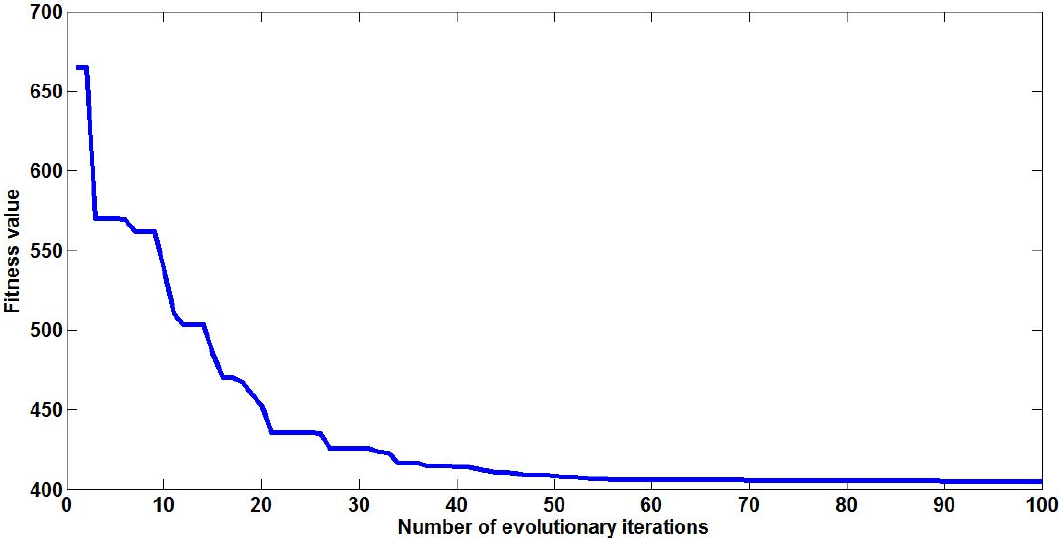
Fitness evolutionary process of DE
Figure 7 shows the position, velocity and acceleration versus the time curve of each joint for the selected optimum trajectory. From this figure, it can be seen that the acceleration trajectory is continuous everywhere and without discontinuous points, which is beneficial to the balance and stability of the humanoid body. In addition, the maximum acceleration

Position, velocity and acceleration versus the time curve of each joint for the 7-DOF manipulator

In order to validate the performance of the proposed method in this paper, the method in the paper will be compared with the global minimum-jerk trajectory planning based on the DE method (MJTP-DE), whose main problem is to find the minimum-jerk trajectory within a determined time by using the DE algorithm. The jerk minimization problem during a determined time has been copiously studied[20–22]. Huang et al.[20] used a genetic algorithm to search the optimal joint inter-knot parameters in order to realize the minimum jerk; Piazzi and Visioli[21] presented a new approach to searching for the global minimum-jerk cubic spline joint trajectory of a robot manipulator using interval analysis; Gasparetto and Zanotto[22] used fifth order B-splines to ensure that the squared jerk of the resulting trajectory was regarded as an optimal objective function.
In the MJTP-DE method, the quartic polynomial is also used to interpolate the joint trajectory of the whole motion, while the fitness function of DE is transformed into the following formula (25) when the trajectory satisfies all kinematic constraints of the humanoid manipulator.
where

In turn, each of the joint maximum accelerations of the trajectory by the MJTP-DE method can be obtained. Table 4 lists the maximum acceleration comparison of each joint trajectory planned by these two algorithms, respectively. From this table, it can be seen that the seven maximum accelerations of the proposed method in this paper are all smaller than those of the MJTP-DE method. Taking the first joint as an example, as shown in Figure 8, the maximum acceleration generated by the proposed method is 60.7352 rad/

The acceleration and jerk trajectory for the first joint, where a solid curve is generated by the proposed method, whose maximum acceleration is 60.7352
Trajectory maximum acceleration comparison of each joint for the two algorithms

The differential evolution has solved the trajectory optimization problem of the humanoid manipulator operating in a rapid and continuous reaction environment through an evolution iteration procedure, which spends a little amount of time to obtain the problem solution. For high real-time operation tasks, e.g., ping-pong or baseball playing, this method will not satisfy the corresponding demands. In practice, this optimization process based on DE should be executed offline, that is, the optimized parameters of the movement trajectory are determined through DE offline, after which the obtained trajectory can meet the high real-time performance requirements online.
6. Conclusion
A kind of trajectory optimization method based on DE for a humanoid manipulator in a rapid and continuous reaction environment is presented. In this method, the whole trajectory of the humanoid manipulation is divided into two segments, that is, the operation process and the return process, and a quartic polynomial used to describe each segment. By optimizing the joint acceleration at the target operation moment using DE, a trajectory with a minimum-acceleration and a continuous acceleration profile is obtained to reduce the impact on the humanoid body. Simulation results on a humanoid robot with the 7-DOF manipulator show the effectiveness of the proposed method.
Despite these promising results, there is still room for improving our work in several aspects. It can be seen in Figure 8 that, when the quartic polynomial is adopted to describe the trajectory in the joint space, the jerk curve produces a discontinuous point at the target operation moment, which causes certain wear on the robot and probably shortens its lifespan. How to solve the jerk discontinuous phenomenon is, therefore, worth further study. Furthermore, in fitness function (15), the selection of the weight parameter values wi results in a great impact on the trajectory optimization result; as such, these values should be reasonably set. Instead of using a priori knowledge, specific appropriate values ought to be obtained through parameterers effect analysis on the quality of the optimized trajectory. Consequently, the effect analysis of these parameters wi in (15) could be discussed in the future. In addition, based on the research work in this paper, through optimization of the manipulator's reactive force and torque on a humanoid body, as well as analysing the zero moment point of a humanoid robot etc., a minimum-torque (or force) trajectory planning method should be studied to further reduce the disturbance to the humanoid robot.
Footnotes
7. Acknowledgements
This article is a revised and expanded version of a paper entitled “Optimal Trajectory Planning with Minimum-acceleration for a Humanoid Manipulator by Using Differential Evolution”, which was presented at the 2015 International Conference on Climbing and Walking Robots, held in Hangzhou, Zhejiang Province, China, 6-9 September 2015. The authors would also like to thank Xiong Rong, Liu Yong and Zhu Qiu-Guo from the Institute of Cyber-Systems and Control, Zhejiang University for providing the humanoid robot for this research work. This work is supported by the National Natural Science Foundation of China (Grant No. 61273340, 61203367).