
Abstract
Feature extraction and representation is a key step in scene classification. In this paper, a contour detection-based mid-level features learning method is proposed for scene classification. First, a sketch tokens-based contour detection scheme is proposed to initialize seed blocks for learning mid-level patches and the patches with more contour pixels are selected as seed blocks. The procedure is demonstrated to be helpful for scene classification. Next, the seed blocks are employed to train an exemplar SVM to discover other similar occurrences and an entropy-rank criterion is utilized to mine the discriminative patches. Finally, scene categories are identified by matching the discriminative patches and testing images. Extensive experiments on the MIT Indoor-67 dataset, the 15-scene dataset and the UIUC-sports dataset show that the proposed approach yields better performance than other state-of-the-art counterparts.
1. Introduction
Scene classification is an important and challenging task for robots to understand the content of images in computer vision, while feature extraction and representation is a fundamental step in scene classification. Human beings, when seeing a picture, can extract the context information between global features and local features, which is helpful for inferring the place they are looking at. For example, the place with lots of clothes is probably a wardrobe; while a computer is unlikely to be found in a kitchen. To make a computer understand an image efficiently like a human being, the ability to capture and analyse such context information should be embedded in a computer vision system.
Generally speaking, image representation can be categorized into three levels: low-level, mid-level and high-level. In low-level representation, great progress has been achieved with the invention of local invariant descriptors, such as SIFT [1], SURF [2] and ORB [3]. For instance, Nister et al. [4] proposed an extremely efficient image retrieval method based on SIFT features. It takes only around 0.2 seconds to extract features on a 640 × 480 frame and the database query takes only 25ms on a dataset with 50,000 images. However, low-level features based methods cannot provide sufficient semantic information for scene recognition, since they depend mainly on corner points.
In order to extract semantic information, high-level features based on object detection have been introduced to image representation in recent years. In [5], Dalal et al. proposed a gradient descriptor, called histogram of oriented gradient (HOG), which has been proved to be an effective pedestrian detection descriptor. The HOG models of pedestrians were trained in a sliding window framework to represent the global shape features of pedestrians. Felzenszwalb et al. [6] extended the HOG model to a deformable part model (DPM) by adding object parts. It has become a state-of-the-art object detection framework for multiple classes. Such high-level representation has also been applied to scene classification. In [7], Li et al. presented an object bank (OB) method to encode the object appearance and spatial location information in images. Thus, an image can be represented as objects appearing in it. Zhu et al. [8] proposed an upstream model that modelled the interaction of objects and scene topics jointly. Since the number of trained object classes is small, an image could not be well represented using the model. Pandey and Lazebnik [9] applied the standard DPM model to scene classification rather than object detection. In their study, the DPM model can capture recurring visual elements and salient objects in different scenes. By integrating the standard global image features, the method obtained a good performance in terms of classification accuracy on the MIT Indoor-67 dataset. However, the issues of object part initialization and learning were not addressed in the article. Moreover, since the labels of the objects are necessary for all high-level feature based methods, the models have to be retrained for reorganization of a new object class.
Compared with the low-level and high-level representation of images, mid-level representation has attracted a lot of attention, since it is more flexible and powerful for visual recognition. Mid-level representation is more adaptive to appearance distributions in the real world than the low-level features; on the other hand, it does not require the semantic grounding of high-level entities. In [10], Vogel and Schiele proposed a model to detect a set of visual concepts locally over image regions; in this method, images were represented by the frequency of the detected local concepts. In [11], a method that discovered a set of discriminative image patches without any supervision was proposed by Singh et al. Some mid-level patch candidates were chosen by an SVM; these candidates were further refined according to purity and discriminativeness. In addition, Singh et al. [11] also proposed a notion of “doublet”, which denotes a combination of two noticeable mid-level patches satisfied with a certain spatial relationship. The “doublet” helps to effectively represent the context of an image. The method obtained promising classification results on the MIT Indoor-67 dataset. Carl et al. [12] proposed a discriminative clustering approach to discover geographically representative image elements automatically from Google Street View imagery. They demonstrated that these elements were visually interpretable and perceptually geo-informative. In their work, a large number of randomly sampled candidate elements are initialized; those candidate elements with too many neighbours in the negative training dataset are then rejected; finally, clusters are gradually built by applying iterative discriminative learning to each candidate. Mittelman et al. [13] proposed a weakly supervised approach to learn mid-level features, where only class-level supervision is provided during training. They developed a novel extension of the restricted Boltzmann machine (RBM) by incorporating a Beta-Bernoulli process factor potential into hidden units. The method uses the class labels to promote category-dependent sharing of learned features, which tends to improve the generalization performance. Juneja et al. [14] proposed a simple, efficient and effective method to discover discriminative image patches (or parts) for scene classification. Starting from a single patch occurrence, or seed block, the additional patches are incrementally discovered by training SVMs to find the occurrences of the seed block. During learning patches, a superpixels-based segmentation method [15] was employed to initialize the locations of seed blocks. A seed block is initialized for each superpixel by centring a 64×64 pixels block at the centre of the superpixel whose area is in the range of 500 to 1,500 pixels. However, the initialization strategy may lose some significant mid-level features since the constraint is rigid.
In this paper, we propose a new mid-level patch learning method for scene recognition based on contour detection. First, in order to obtain sufficient candidate patches, a contour detection algorithm is applied to image preprocessing, which detects the occurrences of the contours in the images in a sliding window framework. The seed blocks are then initialized by selecting the image patches containing more contour pixels. Next, these seed blocks are used to build models of image regions to find more patch occurrences in the training data. After that, an entropy-rank evaluation criterion [14] is employed to select discriminative patches from all the candidates discovered above. Finally, the discriminative patches are utilized to categorize scenes by matching test images. The main contributions of this paper are as follows:
The proposed learning method with little supervision can automatically discover image patches with semantic information, which is helpful for improving scene recognition performance.
The proposed method of patch learning based on contour detection performs better than other counterparts.
The proposed method based on mid-level features obtains better performance than other methods in terms of recognition accuracy.
The rest of the paper is organized as follows: the contour detection-based learning method of discriminative patches for scene classification is presented in Section 2. In Section 3, a novel patches-based scene classification method is described. The experimental results and discussions are presented in Section 4. Finally, the paper is concluded in Section 5.
2. Learning Discriminative Patches
Some discriminative objects usually present in specific scenes. For instance, computers typically appear in computer rooms; pots and pans usually stay in kitchens; books are generally the major feature in libraries. Thus, by seeing some discriminative objects in a scene, a person can determine what type of scene he/she is possibly or impossibly in. Compared with low-level features, mid-level features can provide more abstract semantic information, which is helpful in identifying the scenes. Mid-level features usually include some structures of visual fragments, such as corners of a room, a part of a potted plant, etc.
In this section, we introduce a patch learning algorithm to automatically discover the discriminative patches in the images. The learning approach consists of three procedures: initialization, learning and discovery. Since the initialization is a prerequisite for the latter two procedures, it is crucial to generate candidate image patches (i.e., seed blocks) to train the learning models. In this paper, a contour detection-based initialization approach is proposed to generate the seeds and the patches with more contour points are chosen to be seed blocks.
2.1. Contour detection
Inspired by [16], we introduce a contour detection algorithm based on sketch tokens in the initializing procedure of patch learning. Sketch tokens are mid-level representations of images that are learned from image patches containing hand-drawn contours. In the training step, patches with human-generated contour pixels are clustered to form sketch tokens by using a random forest classifier. In the contour detection step, when a patch is classified into a class of sketch tokens, the centre pixel of this patch is regarded as a contour pixel. In this paper, the patches with more contour points are regarded as seed blocks, which are then used to find discriminative patches.
2.1.1. Definition of sketch tokens
The goal of defining sketch tokens is to represent the variety of image local edge structures, such as straight lines, curves, corners, t-junctions and y-junctions. Human-generated image contours in [16] are adopted to discover and define the sketch tokens. The image dataset for learning sketch tokens was built by David Martin et al. [17]. In the dataset, there are a set of images I and a corresponding set of hand-drawn binary contour images S.
The sketch tokens are defined as the clusters of the patches sampled from the binary image set S, which satisfy the following two conditions: first, that all of the patches have a fixed size of 35 × 35 pixels; second, that these patches contain labelled contours at their centre pixels. The clustering is performed on the features of their corresponding patches in images I using a K -means algorithm. Fig. 1 shows some examples of sketch tokens. The details of feature extraction and classification are discussed below.

The average values of sketch token clusters
2.1.2. Feature extraction and classification
Given the notation of sketch tokens, their occurrences in every location of the input images can be detected. If a patch of the input images is considered to be a kind of sketch token, the centre pixel of the patch is selected as a contour pixel. As described in [18], the features are grouped into two types. One is where the features are directly indexed into multiple channels and the other is the self-similarity features. The channels of patches in images I consist of colour, gradient magnitude and oriented gradient. The colour channels are computed in the CIE-LUV colour space. The gradient magnitude channels are calculated using Gaussian blur with σ =0, 1.5 and 5 respectively. In the gradient magnitude channels with σ =0 and σ =1.5, the oriented gradients are quantified into four channels (voting into four orientation bins in

where

Illustration of distances in a colour channel. The left is the original patch and the right is the L1 distances
Since there are multiple classes of sketch tokens, a random forest is used to categorize their types. Similar to [16], 150,000 contour patches (1,000 per token class) and 160,000 non-contour patches (800 per training image) are randomly sampled to train each tree. For each tree, the Gini impurity measure is employed to select a feature and decision boundary for each branch node from possible features. If there are m classes of sketch tokens and one non-contour class in the tree, the Gini impurity index for a feature is defined as

where pj is the probability of a feature that belongs to the class j.
2.1.3. Contour detection
As described above, the features of all 35 × 35 patches in the images are classified using the random forest method. The outputs of these patches are the probabilities of sketch tokens' classes (including non-sketch token classes). The tokens label of a patch is assigned to the sketch token class that holds the highest probability value. Since all the centre pixels of sketch tokens are contour pixels, the centre pixel of a patch categorized to a sketch token is considered as a contour point.
Let
If there are n trees in the random forest, the probability of the patch xi belonging to the token j produced by the

In this way, all pixels in an image can be classified as contour points or non-contour points. In this paper, 25 trees are trained until every leaf node is pure or contains five examples or less. All of the features and parameters of the random forest are performed on the popular Berkeley segmentation dataset and benchmark (BSDS500) [17]. We define edge strength according to Equation (3) for sketch tokens. Fig. 3 shows some qualitative comparison results of the contours. It is evident that the sketch tokens method captures more details, such as the structure of the building on the second row, than the SCG approach [20].

2.2. Learning discriminative patches
2.2.1. Initialization
In this paper, a pixel is considered as belonging to a contour when the probability ei in Equation (3) is larger than a threshold T (0.7 in our experiments). The seed blocks of the training images can be generated using the contour detection approach. First, for each image in the training dataset, we randomly sample S image patches with 64 × 64 pixels. The pixels of each patch are then categorized into contour pixels and non-contour pixels by utilizing the contour detection method discussed above. As a result, the top L (20 in our experiments) patches with the most contour pixels are chosen to be the seed blocks. The seed blocks initializing algorithm is shown in Algorithm 1, where the parameter
Seed blocks initialization

Fig. 4 shows some examples of initializing seed blocks. The top row in Fig. 4 is the results of [14]; the second row is the results of our method. From Fig. 4, we can see that the proposed approach obtains more seed blocks than [14]. More seed blocks are helpful to effectively discover occurrences of the seed blocks.

Examples of initializing seed blocks. The top row is the results of [14]; the second row is the results of our method. In each figure (a or b), the middle column shows the corresponding superpixel image and contour pixels image respectively; the right column shows a subset of the seed blocks.
2.2.2. Learning patches
Given the seed blocks, other similar occurrences of each seed block can be discovered. An exemplar SVM [21] is applied to induce a further expansion process to make more variable occurrences for each seed blocks. First, each seed block and a certain number of randomly sampled negative instances from the training images are represented as HOG features. The exemplar SVM is then trained by optimizing a convex objective to discover the occurrences of the seed block in the entire training dataset using a slide window strategy. The convex objective of the exemplar SVM can be represented as

where

The left is a seed instance. The right is some expanded example patches.
2.2.3. Discovery
In this paper, a discriminative patch refers to one that appears frequently in many images of one class but seldom in the other classes. For example, a wheel is a discriminative patch in both bike class and car class. On the contrary, a patch appearing frequently in many classes may indicate that the patch is not discriminative, such as a featureless wall. In this section, a criterion, named entropy-rank (ER) curve [14], is employed to evaluate which patch is most discriminative. Specifically, each patch is evaluated in a sliding window framework on every validation image. For one patch, assuming that its occurrences in the validation dataset correspond to a set of vectors

where N is the number of scene classes and
Based on the definition, an entropy-rank curve is plotted, where the x-axis is the value r and the y-axis is the corresponding entropy

The red curve has low entropy at each value r, which indicates that the occurrences are mined from a few classes. The blue curve has more uniform entropy, which shows that the occurrences are discovered from many classes to make the patches less discriminative.

Some examples of discriminative and non-discriminative patches
3. Scene Classification Based on Discriminative Patches
Since the discriminative patches discovered above provide semantic information for scene recognition, we employ them to perform scene classification. First, a set number of image patches with 64 × 64 pixels are randomly sampled from each training image. The contour pixels of the sampled patches are detected based on sketch tokens. Therefore, the pixels of the sampled patches are classified into contour pixels and non-contour pixels. The patches with the most contour pixels are chosen to be seed blocks. Each seed block and negative instances sampled randomly from the training images are then represented as HOG features to train an exemplar SVM by optimizing a convex objective. The occurrences of the seed block in the entire training dataset can be discovered by the trained exemplar SVM in a sliding window framework. All seed blocks and their corresponding occurrences are regarded as candidate discriminative patches. Next, the discriminative patches are further mined from candidate patches using a certain criterion. A patch with lower AUC will be considered to be discriminative. Finally, the top m discriminative patches of each category are utilized to recognize the scenes by matching with the testing images in a sliding window framework. Specifically, for a scene class c, the matching score of this class to the test image is defined as

where pi is the x-coordinate of the top-left pixel of a matched patch in the test image; W is the width of the test image, with wi the width of the
Discriminative patches-based scene classification

4. Experimental Evaluations
The proposed approach is evaluated using three popular datasets: MIT Indoor-67 dataset [22], 15-scene dataset [23] and UIUC-sports dataset [24].
4.1. MIT Indoor-67 dataset
The MIT Indoor-67 dataset [22], containing 67 indoor scene categories, is largely divided into shops, home, public spaces, leisure and work. Evaluation uses the protocol of [22], where each category has 64 training images, 16 validation images and 20 test images. Performance is reported in terms of average classification accuracy (Acc) and mean average precision (mAP) as described in [22]. The average classification accuracy is calculated as the mean over the diagonal values of classification confusion matrix. The advantage of this method is that it is less sensitive to unbalanced distributions of classes.
When categorizing scenes, we perform the experiments with different numbers of patches per category for matching. The results of the recognition rate are shown in Table 1; from which we can see that the highest accuracy is achieved when 50 patches per class are selected. Fig. 8 shows the corresponding curve of the recognition results. In the rest of this paper, we select 50 patches per category in our experiments.
Results of classification accuracy with a different number of patches per category


The accuracy curves at different numbers of patches per category
The results of the proposed approach, compared with other state-of-the-art methods [7–9, 11, 14, 22, 25–27] over the MIT Indoor-67 dataset are shown in Table 2.
The performances of scene classification over the MIT Indoor-67 dataset

As shown in Table 2, the proposed method outperforms other approaches in terms of Acc. In addition, the mAP (mean Average Precision) of the proposed method achieves 45.72%, which is better than that of [14].
4.2. 15-scene dataset
The 15-scene dataset contains 4,485 images of 15 categories of indoor and outdoor scenes, such as bedroom, kitchen, coast, city, etc. We randomly chose 100 images per class for training and the rest for testing. The accuracy results are shown in Table 3 and the classification confusion matrix of the proposed method is shown in Fig. 9. It is evident from Table 3 that the proposed method outperforms other counterparts except for the Hybrid-Parts+GIST-color+SP [34] and the LScSPM [32]. In contrast to a HOG-based representation of the proposed approach, the method in [34] adopted multi-features composition, which leads to slightly better performance in terms of accuracy; while the LScSPM in [32] using low-level representation obtains the best performance; however, the extracted features have a lack of semantic information. From Fig. 9, we can see that the false rates of the bedroom and the living room are higher than other scenes. This is because the features in the images of the bedroom and the living room are too similar to identify their categories. Some confusing images of the bedroom and the living room are shown in Fig. 10.
Classification performances over the 15-scene dataset


The confusion matrix of the results on the 15-scene dataset
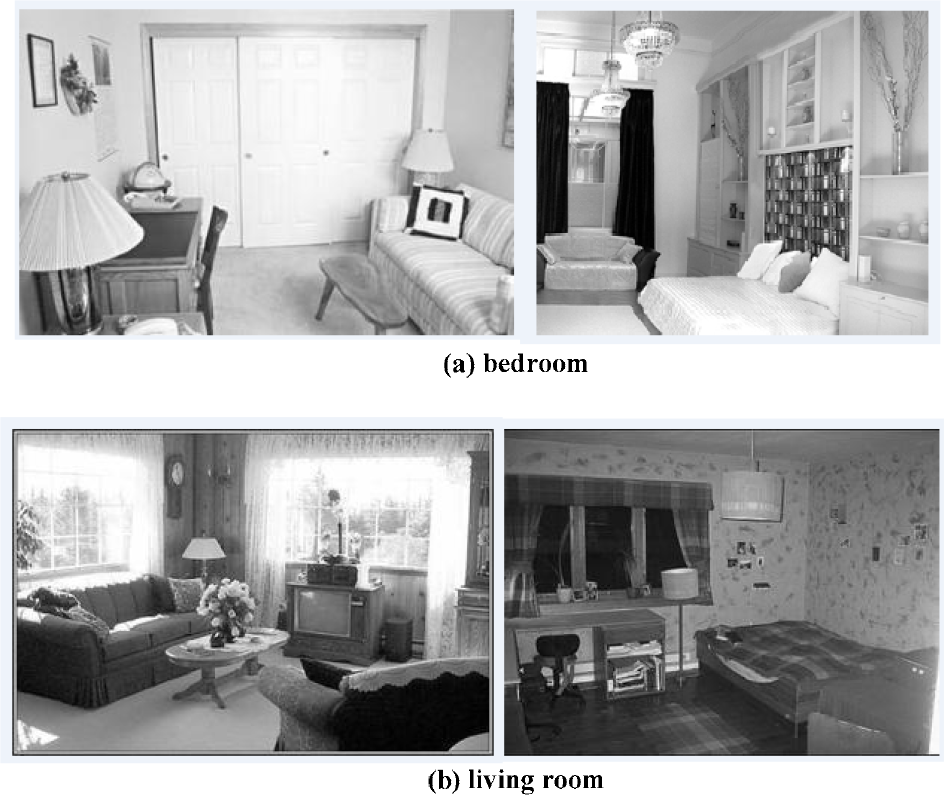
Confusing images of bedroom and living room
4.3. UIUC-sports dataset
The UIUI-sports dataset contains 1,792 images of eight sports categories. We randomly selected 70 images for training and 60 images for testing in each category.
The performance comparison is shown in Table 4. The classification confusion matrix of the proposed method is shown in Fig. 11. As shown in Table 4, the proposed approach performs better than all other methods, except for the p.d.f (probability density function) method, the probable reason being that the p.d.f method uses an improved HOG features method for image representation.
Classification performances on the UIUC-sports dataset

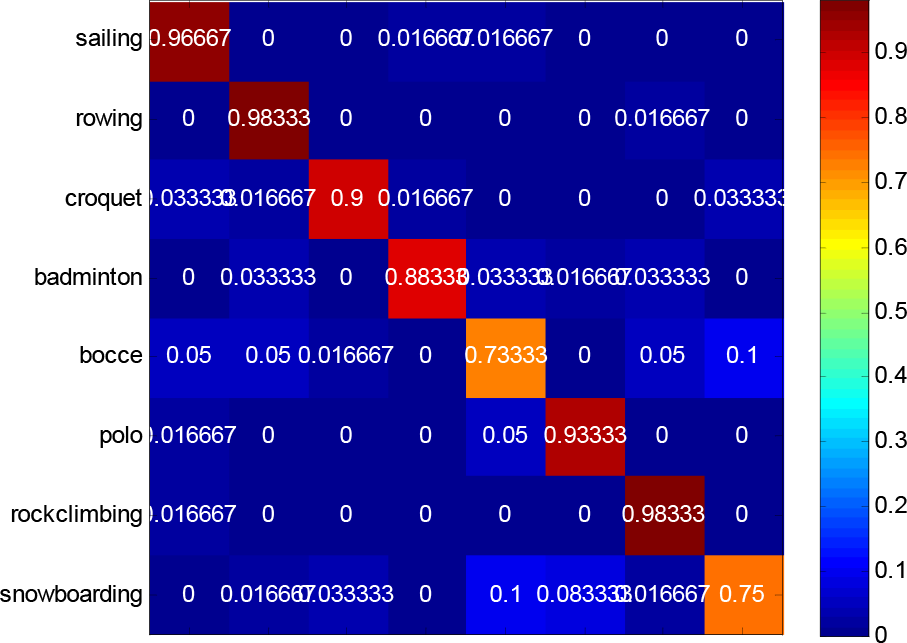
Confusion matrix of the results on the UIUC-sports dataset
4.4. Discussions
Mid-level representation is more adaptable to appearance distributions in real world than low-level features; however, learning mid-level features is a difficult task, since it usually involves many iterative operations. The proposed approach improves the performance by introducing a sketch tokens-based contour detection into the procedure of learning image patches. Since the contours contain more edge information, which is helpful for scene recognition, the proposed method can extract better mid-level features owing to the contour detection in initializing seed blocks. The experimental results on the MIT Indoor-67 dataset show that the proposed method obtains the best performance compared with other state-of-the-art methods. The experimental results based on the 15-scene dataset and the UIUC-sports dataset demonstrate that the proposed method performs better than most of the state-of-the-art approaches. While the proposed method works slightly worse than the LScSPM [30] and the Hybrid-parts+GIST-color+SP [29] on the 15-scene dataset, our method outperforms them over the UIUC-sports dataset.
5. Conclusions
We have proposed a contour detection-based mid-level feature learning method for scene classification. The proposed approach can automatically discover mid-level image patches with semantic information. First, since the initialization procedure is important for learning distinctive patches, we introduced a contour detection method based on sketch tokens to find seed blocks with more contour pixels, which results in improving the performance. The seed patches are then used to train exemplar SVMs to discover other similar occurrences under a sliding window framework. Finally, the discriminative patches are further mined by an entropy-rank criterion. Only the patches that appear frequently in one class but seldom in other classes are considered to be discriminative. Scene categories are identified according to the total response of matching scores between the distinctive patches and the testing images. Extensive experiments on the MIT Indoor-67 scene dataset, the 15-scene dataset and the UIUC-sports dataset demonstrate that the proposed method performs better than its counterparts. Although our approach has achieved promising results, further research will be carried out to improve the efficiency of feature extraction.
Footnotes
6. Acknowledgements
This work is partly supported by the National Natural Science Foundation of China under grant nos. 61201362, 61573351, 81471770 and 61273282; the Importation and Development of High-Caliber Talents Project of Beijing Municipal Institutions under grant no. CIT&TCD201404039; and the Scientific Research Project of Beijing Educational Committee under grant no. KM201410005005.