
Abstract
A redundant manipulator usually has multiple kinematic solutions at the velocity level and can be used to optimize other criteria. Although the pseudo inverse of the Jacobian matrix generates a solution with the least 2 norm (LN), it does not consider other constraints imposed by the system or the environment. The general weighted least norm (GWLN) method handles these general constraints via the concept of virtual joints, but this is not always feasible when the number of constraints exceeds the degrees of freedom. This paper proposes a unified weighted least norm method (UWLN) to unify the LN and the GWLN methods. The UWLN method merges the constraint tasks into a quadratic criterion that poses no limitations on the number of constraint tasks. It also generates a least 2 norm solution when all constraints are deactivated, thereby unifying the LN and GWLN methods. A comparative simulation on a 7-DoF planar manipulator demonstrates the validity of the algorithm.
1. Introduction
Manipulators are today widely used in both industry manufacture and services in daily life, e.g., welding, spray-painting, polishing, surgery, etc. A well-tuned manipulator system can execute various manipulation tasks with good precision. In addition to manipulation tasks, manipulators are also subject to various types of constraints. Some constraints are imposed by joint actuators, e.g., the configuration coordinates should remain in a feasible range and not violate physical limits, the joint velocity should not overflow the limitations of the harmonic drive, the available joint torque is limited by the capability of the actuator, etc. Some constraints are enforced by the operation environment: the link of the manipulator should not collide with the objects in the environment if doing so is not on purpose, the legged robot should keep its centre of mass in the supported polygon, the target being monitored should stay in the field of vision during a visual servo process, etc. These constraints lead to a constrained control problem, which complicates the control of the manipulator.
When the manipulator has extra degrees of freedom with respect to the dimensions of the task, it is redundant and has more dexterity. This dexterity can be used to optimize other criteria or to accomplish the constraints without interfering with the main task. Significant research aiming to provide a solution to the constrained control problem has been carried out. Generally, the algorithms that solve the constrained control problem can be classified into three groups, according to the relative priority of the manipulation task and the constraint tasks.
The first class assigns the manipulation task a higher priority, while the constraint tasks are solved via optimization of some criteria in the feasible set, defined by the manipulation task. For example, Liegeois proposes the gradient projected method (GPM) for solving the joint limit problem by minimizing the quadratic potential constructed in the joint space, by decreasing it along the projection of its gradient into the null space of the Jacobian matrix [1]. Hollerbach used joint acceleration in the null space of the Jacobian matrix to minimize torque deviation from the centre point in the joint torque space [2]. However, the gradient projected method may fail to carry out the constraint task if the constraint task conflicts with the manipulation task and sometimes this method will cause oscillations in the control variable [3].
When the constraint tasks have the same priority as the manipulation task, they coexist or compete with each other and are solved together. Khatib combined the collision avoidance task and the manipulation task in the joint acceleration space via an artificial potential field method [4]. However, the potential field of manipulation task may be interfered with by the field of constraints, even when the system can use its redundancy to fulfil both the manipulation task and constraint task. Baillieul introduced the extended Jacobian method by treating the constraint tasks as an additional dimension of manipulation task [5]; Maciejewski used this method to solve the collision avoidance problem in dynamic varying environments [6]. However, when the constraint task conflicts with the manipulation task, only a least square solution is derived by the extended Jacobian method, which may result in deviations in both the constraint task and the manipulation task. Cheng and Cheol formulated the manipulation task and the constraints as feasible when set within a quadratic programming (QP) problem and in this way solved the joint angle limits, joint velocity limits and joint torque limits [7,8]. Zhang solved the quadratic programming problem through an evolving dynamic system based on neural networks and discovered the joint torque constraint and obstacle avoidance [9, 10, 11]. However, these QP-based methods do not address the case when the constraint task conflicts with the manipulation task, which leads to an empty feasible set.
In some instances, the constraint task deserves higher priority, e.g., the self balance task of a humanoid robot. The violation of these constraint tasks may cause a safety problem or result in deviation from the desired task trajectory. Thus, the manipulation task must be accomplished strictly in the feasible domain defined by the constraint task. Flacco resolved the limitation on joint velocity by actively saturating the corresponding joint velocity on its capability boundary [12], which can be viewed as an special case of the priority-based hierarchy [13,14]. Kanoun generalized the task-priority framework to inequality constraints and maintained the pose of a humanoid robot while performing a reaching task [15]. However, this priority-based hierarchy is difficult to maintain: when the priorities are reversed or the constraint tasks are activated/deactivated, the switching law is complicated and discontinuities in the control solution may occur [16].
In [17], we propose the general weighted least norm method and solved both the joint limit constraint and the collision avoidance problem. The GWLN method has a constant structure and ensures the constraint tasks higher priority. By optimizing the weighted norm of the virtual joint variable, the manipulation task is not affected by the constraint tasks if they are compatible and the constraint tasks can take priority over the manipulation task via damping if they conflict. It is a pity that the GWLN method is not good at handling multiple constraints; here, the number of constraint tasks is limited by the size of the transform matrix and any two combined constraint tasks should not simultaneously near their thresholds. This limitation restricts the performance of the GWLN method. Furthermore, the transform matrix suffers from singularity and may result in numerical instability if the subtasks are linearly dependent. Furthermore, the solution derived via the GWLN method does not have the property of least 2-norm, even when all the constraints are deactivated. This property will raise the amplitude of motion and the energy consumed during the manipulation process.
To improve the performance of GWLN method, in this paper, we solved the constrained control problem via a unified weighted least norm (UWLN) method. Different from the GWLN method, the UWLN method combines constraints into a quadratic criterion that is able to contain arbitrary constraints. The criterion matrix always has full rank and is free from the singularity in the transform matrix. Moreover, the criterion matrix coincides with the criterion of the LN method when all the constraint tasks are not activated, which establishes a smooth transition between the LN solution and the constrained solution. This approach proves that the unified weighted least norm method can accomplish the constraint tasks as well as the GWLN method.
This paper is organized as follows: in section II, we recall the GWLN method and illustrate its problems. In section III, we propose the UWLN method, which overcomes the drawbacks of the GWLN method and unifies the constrained solution and the LN solution. In section IV, simulation of a constrained control process of a 7-DoF planar manipulator is carried out using the Robotics Tool Box in Matlab, demonstrating the validity of the algorithm and its superiority over the GWLN method. Finally, some conclusions are drawn.
2. The GWLN method
Describe the kinematic mapping of a manipulator on the velocity level as:

where

where

to form a close loop error dynamic. Here, xd and
When z is chosen as the zero vector, the resulting solution

which minimizes the scope of the action by minimizing the pseudo kinetic energy
In addition to the manipulation task, a manipulator also has to work within the constraints that the system and the environment impose. These constraints restrict the feasible joint coordinate of a manipulator. Assume that these constraints can be summarized in unilateral form:

where
If we think of the state variable q as drifting in the feasible domain with velocity

For a nonlinear boundary constraint, the normal direction
As long as
Note

Here, the manipulation task is formulated as a minimization of the gap between the command task rate
The GWLN method solves the constrained manipulation problem (8) by introducing the virtual joint variable, which is derived via the coordinate transform matrix T:

where the transform matrix T is constructed as:

here,
The manipulation task can be rewritten in the virtual joint variable as:

where

The virtual joint variable solution minimizing the weighted norm

Here

where

where
When wi s tends toward ∞, the solution (14) satisfies that:

Thus, (7) and subsequently, (5) can be ensured through the GWLN method by setting
However, the GWLN method is not good at handling multiple constraints. Due to the finite degrees of freedom of the manipulator, multiple constraint tasks must be combined. These constraint tasks to be combined are required to not simultaneously be near their thresholds, which limits the application of the algorithm. Additionally, if constraint tasks Ci s are linearly dependent, the transform matrix T may not be fully ranked, which will result in numerical instability when inverted in WT.
When the system leaves the boundary of the constraints, all weight factors wi are equal to 1. In this case, the GWLN method still generates a solution that minimizes
3. The unified weighted least norm method
In the previous section, we discussed the defects of the GWLN method, which mainly result from the construction of the criterion matrix. In this section, we address these problems and propose the unified weighted least norm method, which has a stable criterion matrix and the capability of merging multiple constraint tasks.
The criterion for the constrained control problem (15) is:

which is dominated by
On the other hand, the least 2-norm solution (4) solves the problem:

which is equivalent to (15) with

where

Since (20) makes a smooth transition between the least norm problem and the GWLN problem, we call (20) the unified weighted least norm (UWLN) problem.
According to the weighted least norm method, the least norm solution of (20) is:

In case of singularities in the Jacobian matrix, a damped solution is used for practical purposes:

The validity of the solution (22) is shown by the following theorem:

According to [18], when P and R make up a positive, definite matrix, the following identity holds:

Applying (24), we get:
When

Since

Then, we have
Note that (19) is a summation of the weighted quadratic criteria
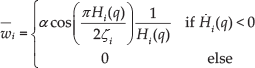
where α is a scaler for adjusting the intensity of the algorithm and
Compared with the GWLN method, the UWLN method has the following advantages:
The UWLN method contains the constraint tasks in the quadratic criterion
The UWLN method constructs a full rank criterion matrix
The computational burden of GWLN and UWLN methods are almost the same, since the formula (14) and (21) requires the same flops; therefore, the time consumed will not differ too much. However, the UWLN method directly constructs the quadratic criterion, thus avoiding the construction of the transform matrix in the GWLN method, which requires
The UWLN method unifies the least 2-norm solution and the constrained control solution. It will generate an LN solution if all constraint tasks are deactivated. However, the GWLN method will generate a solution with a much larger amplitude, since the criterion matrix Q differs form the criterion of the LN method In. This means that the GWLN method will consume more energy during the manipulation process. Later, we will observe this phenomenon in the simulation.
4. Simulation result
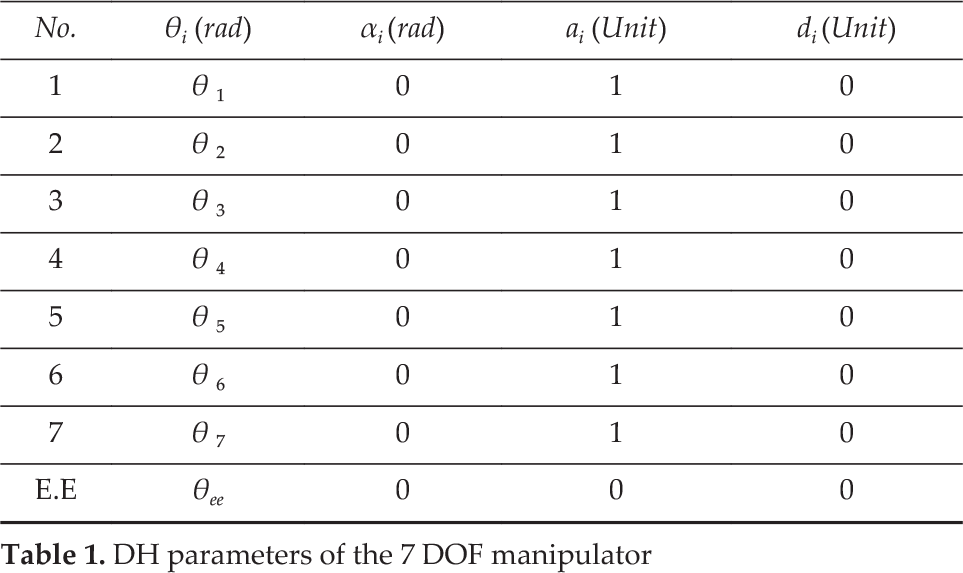
We simulated the manipulation process of a 7-DoF planar manipulator with collision avoidance control. The D-H parameter of the manipulator is shown in Table 1. The simulation step length we chose was
DH parameters of the 7 DOF manipulator
We placed the manipulator at an initial configuration as follows:

where ω is the centre angle of the quadrant trajectory:
here,
To simplify the geometric model for the collision avoidance task, the radius of the links were ignored. Note that all the links had the same length of
For the LN method, the link of the manipulator will hit the obstacle at

Trajectories of mid points of the links without collision avoidance control. The mid points of link 5–7 crossed the safe line y thres =2.5. Each coloured line segment represents a link of the 7-Dof planar manipulator and the blue line segment represents link 1.
Trajectories of joints without collision avoidance control. Due to a lack of collision avoidance control, joint 5 crossed the obstacle line y obs =3, which indicates a collision with the obstacle.
To prevent the mid-point of each link from crossing the safety line

Without losing generality, we chose
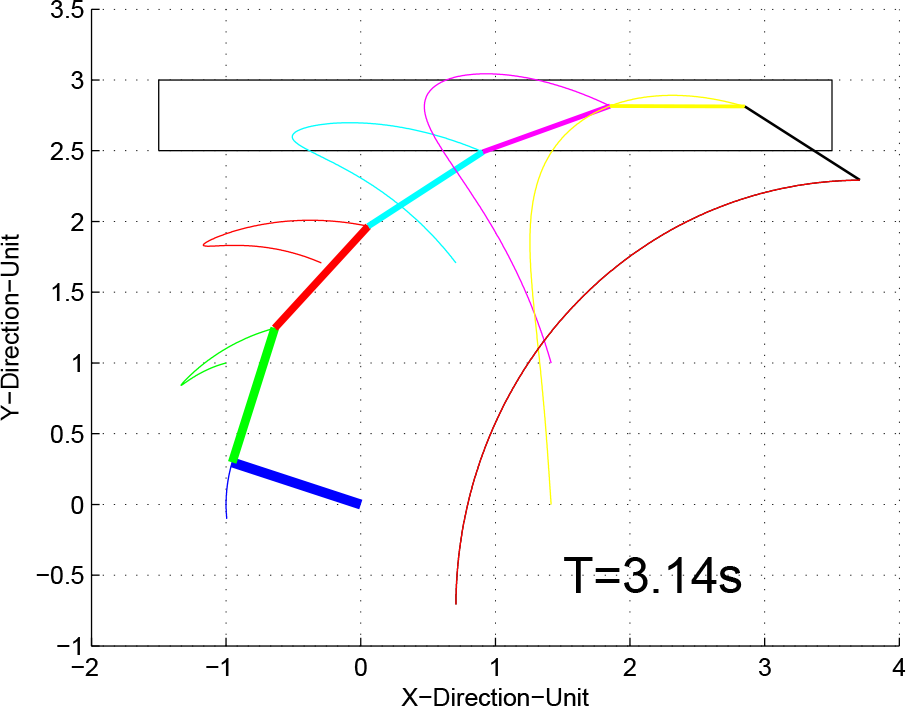
The paths of the mid-points of the links are shown in Figure 3. It is clear that none of the mid-points crossed the safety line

Trajectories of the mid-points of the links with collision avoidance control effected by the UWLN method. None of the mid-points crossed safe line y thres =2.5, which indicates success in the collision avoidance control.

The trajectory of each joint with collision avoidance control carried out by the UWLN method. None of the joints crossed the obstacle line y obs =3, confirming the success of the collision avoidance control.

Distance between obstacle and each mid-point of the links. All of the distances took on a positive value, which confirmed the success of collision avoidance.

Approaching velocity between obstacle and each mid-point of the links. It is obvious that the velocity of the mid- points of links 5–7 are depressed, as the distance between them and the obstacle tends to be zero.

The weight factor of the collision avoidance task of each link. As the distance between obstacle and each mid-point of the links decreases, the weight factor increases.

Joint velocity command generated by the UWLN method. The command curves are continuous, which results in a smooth running of system.
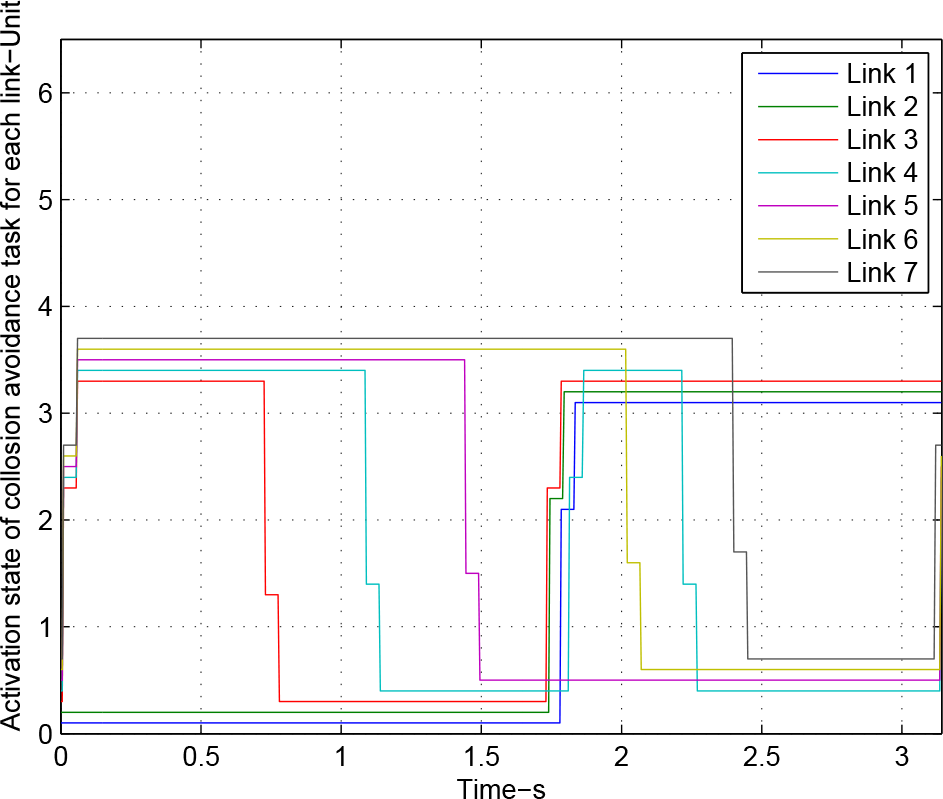
Activation state of collision avoidance task. The states take values from

Manipulation task errors during collision avoidance control effected by the UWLN method
We also executed the GWLN algorithm to solve this constrained manipulation problem. Since the initial configuration results in a dependency between the constraint tasks, the original GWLN method has a singular transform matrix that leads to numerical instability. We therefore only carried out the GWLN algorithm with a combined constraint task. The trajectories of the centres of each link and the final configuration is shown in Figure 11. Although none of the mid points crossed the safe line, the movement generated by the GWLN method was rather big compared to the LN method (Figure 1) and the UWLN method (Figure 3). Since all the constraint tasks are combined by algebraic addition, the resulting movement appears somewhat odd.

Trajectories of each mid-point with collision avoidance control carried out by the GWLN method. None of the mid-points crossed the safety line
The 2 norm of the joint velocity command of the LN, UWLN and GWLN method, which is equal to the kinetic energy of the manipulator if all the links have a unit mass, is shown in Figure 12. It is obvious that the UWLN algorithm generates a command curve that consumes less energy than the GWLN method. During the time period

The 2 norm of joint velocity commands generated by least norm, the GWLN method and the UWLN method; it is obvious that the UWLN method consumes less energy than the GWLN method and its command curve is closer to that generated by the LN method
5. Conclusion
In this paper, we used the unified weighted least norm method to solve the constrained manipulation problem in redundant manipulator control. The criterion matrix in the UWLN method is capable of combining arbitrary constraint tasks and always has full rank, which guarantees the numerical stability. Furthermore, the proposed UWLN method establishes a smooth transition between the LN solution and the constrained control solution. This unification eliminates motion in the null space of the Jacobian matrix when the constraint tasks are not activated and therefore generates motion with a smaller amplitude compared to the GWLN method. The validity of the UWLN method is confirmed in this paper by both providing statistical proof and the simulation of a constrained manipulation process of a 7-DoF planar manipulator.
Footnotes
6. Acknowledgements
This work is supported by a grant from the National Natural Science Foundation of China (61374174), the Zhejiang Province Natural Science Fund (LY13F030001) and Hangzhou City major scientific and technological innovation projects of industrial chain (20132111A04).