
Abstract
Underwater robots are being developed for various applications ranging from inspection to maintenance and cleaning of submerged surfaces and constructions. These platforms should be able to travel on these surfaces. Furthermore, these platforms should adapt and reconfigure for underwater environment conditions and should be autonomous. Regarding the adhesion to the surface, they should produce a proper attaching force using a light-weight technics. Taking these facts into consideration, this paper presents a survey of different technologies used for underwater cleaning and the available underwater robotics solutions for the locomotion and the adhesion to surfaces.
1. Introduction
Various structures, such as: petroleum and gas storage tanks, electric power plants, ships, bridges and oil rigs are invaluable assets to our daily life and the basis for industry and economy. They provide energy, transportation and distribution of products which are the basics of evolution and modern life. We need to take care of these important structures to perform their function for longer time. Bio-fouling buildup material is a major problem that affects them, and the cleaning is the solution. The objective of this survey is to consider the benefits and drawbacks of underwater surface cleaning, based on an understanding of current and proposed underwater cleaning techniques. We use this survey to compare the relative environmental and economic risks associated with existing underwater cleaning systems, and provide guidance to develop an environment friendly robot based system to automate this process and to provide more safety and productivity.
The survey is organized as follows. Sections 2 and 3 present several definitions and the problems caused by bio-fouling with an overview of the cleaning process challenges, environmental restrictions, and industrial requirements. In section 4 the available underwater cleaning technologies are illustrated with the existing robotic technologies for adhering to underwater surfaces and the locomotion principles. Our new concept of crawling robot is presented in section 5. Finally, section 6 outlines the main conclusions.
2. Underwater Surface Cleaning
2.1. Definitions

Bio-fouling buildup on different surfaces
2.2. Problems caused by bio-fouling
Bio-fouling that grows freely can cause many problems. Hard and soft bio-fouling growths can cover any underwater surface, making it rough and less hydrodynamic.
A major cost moving in-water vessels (surfaces) is the cost of fuel. Any reduction in fuel consumption will result in a direct and proportional reduction in operating costs. Since the majority of its propulsive energy is needed to overcome hydrodynamic resistance (friction), for that reason keeping the external surface smooth will minimize waste and improve the speed and/or distance to be gained from the same amount of fuel. Hulls with bio-fouling growth expend more energy and use more fuel, in some cases as much as 25 to 30% more [1]. If the hull is heavily fouled it will sit lower in the water and reduce its responsiveness. Significant fouling like large weeds or mussels can also affect the ability to steer the boat, and that will make the ship far less efficient when traveling through water.
Any increase in frictional drag or decrease of operational efficiency in cooling systems in power plants or any industrial installation as a result of bio-fouling buildup materials and the subsequent increase in fuel consumption will have a serious environmental impact as it adds to greenhouse gases emissions to the atmosphere contributing to global warming [2].
A further environmental threat is posed by the translocation of non-indigenous species as hull fouling. So far the efforts of states and ports have been in the direction of preventing ships arriving in their waters with fouled hulls. For example, the ANZECC code [3] forbids in-water cleaning of vessels in Australian waters for fear that incoming vessels will bring marine bio-fouling into Australia which will then establish themselves there. This situation leads to more and stricter regulations. And the bio-fouling by its very nature will be an international problem.
Underwater structures that are fouled with seaweed and barnacles are subject to more rapid corrosion, and need more frequent maintenance [4, 5].
Another perennial problem caused by these growth take place in every cooling system depending on the sea water for its cooling system (nuclear power plant cooling tunnels, oil rigs water lines) or fire water. In such sensitive applications bio-fouling or the marine growth is a huge concern as it restricts cooling water flow in these systems thus affecting the heat-transfer in the heat exchangers (clogging) [6].
As a consequence of the problems caused by bio-fouling buildup material to the underwater surfaces, states and other interested industrial and research parties should encourage and support research into, and development of technologies for:
Underwater cleaning that ensures effective management of the anti-fouling system (paint), bio-fouling and other contaminants, including effective capture of biological material [7].
Comprehensive methods for assessing the risks associated with in-water cleaning [8, 9, 10].
Underwater surface monitoring and detection of bio-fouling; reducing the macrofouling risk posed by the dry-docking support strips.
The geographic distribution of bio-fouling invasive aquatic species; and the rapid response to invasive aquatic species incursions, including diagnostic tools and eradication methods [11].
3. Challenges and Requirements
This section provides a brief overview on the main challenges that are given by the environment restrictions and the industry requirements. These requirements must be taken into consideration in any functional analysis of typical underwater cleaning robot.
3.1. Working environment restrictions
The geometry of the surfaces is not the main challenge that it is mostly plane with slight curvature, but the main problem is the fact that these surfaces are covered with several mm of buildup materials and fouling. However, the difficulties regarding hazardous surface characteristics are sometimes very challenging: the buildup materials reduce the adhesion force, and can stick to the robot and cause damage and that will complicate the use of specific principles for adhesion or locomotion in the robot. Because of the large size of surfaces, there are almost no restrictions for the robot size and mass except the wish to transport it easily by humans and thus keep the mass reasonable.
3.2. Industrial requirements and special needs
Not only the restrictions given by the environment are crucial for the design of an underwater cleaning robot, also industrial requirements represent important constraints. First of all, a payload has to be carried to successfully fulfill the cleaning task. Furthermore, the robot has to be simple to use and to repair, and be robust enough for not getting damaged when used in such environment and by operators with few experience. Additional needs are universality and modularity to clean a high number of surfaces with different types (geometry and materials).
Localization and navigation
Localizing the robot and finding its path in complex environments is a challenging task that can normally not be solved with only using the camera image.
Power supply and communication
Another challenge related to the payload of an underwater cleaning robot is the question how to supply power, and how to communicate between the robot and the operator. Four options are available:
connecting all sensors and actuators with a separate cable.
placing the control unite on the robot that steers everything on-board and is connected to the operator's interface with a cable.
placing control unite + batteries + an interface for wireless control on the robot.
including intelligence to the robot that it can operate fully autonomously.
As safety restrictions always require a human operator for every device; and wireless communication signals could disturb other components and would anyway be shielded by the steel structure of the component.
Safety, reliability and robustness
Safety, reliability, and robustness are very important criteria for such robots especially when it comes to industrialized prototypes. For this reason, simple mechanisms and vehicles structures, with few parts that could be damaged are normally preferred to highly sophisticated.
Universality and modularity
As the number of different environments in underwater surfaces is relatively large, realizing specialized robots for each surface (shape and material) would be very expensive. For this reason, the ideal underwater cleaning robot should be as universal as possible and able to deal with a large number of different surfaces.
4. State of the Art
In this section we present the overview of the existing technologies and solutions for underwater bio-fouling cleaning systems. First, we briefly describe the available cleaning technologies and their ability to remove this buildup material from surfaces, taking into consideration the drawbacks. Then adhesion and locomotion mechanisms related to the studied problem are surveyed and evaluated from the viewpoint of their capability to work underwater and bearing the reactions. The chapter includes overview of the robotics research and development from the viewpoint of the need and the possibility to design and develop a solution for our problem.
4.1. Cleaning Technics
Underwater surface cleaning technologies currently available or in development can be classified into two categories: technologies that remove bio-fouling growths from targeted surfaces; and technologies that prevent or kill bio-fouling organisms in target areas but do not actively remove them. Both categories of treatment are discussed below with reference to each technology's availability, specificity (shape and material of the surface), effectiveness, impact on original surfaces or sensitive coating, ability to capture the remains removed from the treatment area, frequency of application, and ease of use.
Underwater cleaning using encapsulation technology
Enveloping techniques can be an effective method for killing all bio-fouling on a vessel(set and forget), irrespective of the type or origin or generation bio-fouling extent, this method depends on killing bio-fouling organisms by depriving them of essential resources (light, air, food). It is a low cost technic and simple. However, some inadequacies and losses to the environment have been noticed that some of the bio-fouling material and acids left to the surrounding medium, and there is no evaluation of the effect of enveloping on different coating types.
This method is difficult to be automated (till nowadays depending on divers to do the wrapping), and can be applied just for mobile convex underwater surfaces (vessels) not for concave confined surfaces (tunnels) [12]. See Figure2.

Encapsulation technology
Underwater cleaning using ultrasonic technology
Ultrasonic cleaning technic is not new, it has been used for a wide variety of applications, from cleaning of dental and medical equipment, fine jewelry, ultrasonic is also used for keeping pipes. Over the past decade, environmental issues have meant much tighter controls on industrial cleaning products; there was a necessity to find an alternative solution. Ultrasonic cleaning was considered the most viable solution, by embracing the latest in digital electronics and transducer technology, and this technic made a huge leap forward over the last decade to fill the needs of industry, and the marine hull is one of these fields.
This method depends on producing multiple bursts of ultrasonic energy simultaneously in a multiple range of frequencies. This energy produces a pattern of alternating positive and negative pressure. The alternating pattern creates microscopic bubbles during periods of negative pressure and implodes them during periods of positive pressure in a phenomenon known as cavitation [13]. The implosion creates a micro-jet action that not only provides the cleaning effect on the underwater surface; it also resonates and destroys microorganisms such as algae. The removal of the initial link in the food chain inhibits the growth of barnacles and other marine life that feed on the algae [14].
To use ultrasonic with underwater surfaces a number of transducers is arranged to face the surface to be cleaned(distance 2–5 m), and as an industrial products we have transducers which are simply bonded to the inside of the hulls outer skin, and no hull penetration required [15], and there is some patents for robotized systems [16, 17]. Ultrasonic cleaning is environmentally friendly process, and has no effect on the treated surface, but it is not effective for all types of bio-fouling.
Underwater negative pressure (suction) technology
Underwater suction devices is composed of a vacuum head (horn) for collection and containment of built up materials removed from the targeted surface, by using underwater suction vacuum pump with filtration system to separate the remains from the surrounding medium [18, 12]. See Figure 3.

Negative pressure technology [18]
This technology removes 80% of bio-fouling buildup material, but it is not effective at removing firmly attached organisms (barnacles, tubeworms and cementing bivalves). In addition clogging of the nozzle or the suction hose is a common problem associated with the system.
Underwater cleaning using heat treatment
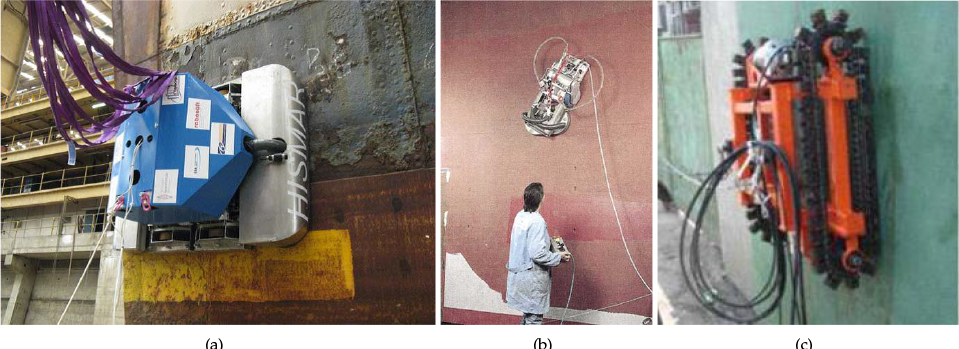
Surface heat treatment is used for soft bio-fouling attached to underwater surfaces by applying thermal shock (70°C) using heated sea water in sealed area of the surface, or by using adapted oxy-gasoline or laser cutting torch in not sealed area. The dead bio-fouling growth remains attached to the surface is released during the first 2–4 weeks because of water movement (vessel sailing in case of mobile surfaces). The effectiveness of the treatment is claimed to be long lasting because the treatment kills not only the algae but also the spores, which delays the process of regrowth. It is recommended for that reason repeat the heat treatment at regular intervals. (every 4–6 months) [12,19]. Figure 4 shows HISMAR robot based on heat treatment cleaning.

Heat treatment, HISMAR robot [19]
The tested efficacy of heat treatment provide an immediate effect on algae mortality and a sustained reduction in soft and early stages of bio-fouling on underwater surface; for that it is considered as cleaning system for light to moderately fouled surfaces.
Based on the absence of independent testing of the effectiveness of heat treatment and its impact on original surface properties or on coatings, we attributed unknown biosecurity and contaminant risks to this method.
Ultra violet technology
Ultra-violet (UV) light irradiation is being increasingly used for water disinfection, and it is evaluated as a pretreatment strategy to control bio-fouling. The experiments showed that biofilm prevention depends on the post-treatment incubation time, in addition to targeted wavelengths, UV spectrum and UV dose. UV irradiation is a non-chemical alternative to control bio-fouling. The mechanism of disinfection by UV light depends on inactivation of suspended cells. However, microorganisms in biofilms differ from their suspended counterparts regarding their physiology, metabolism, and resistance to disinfectants and antibiotics. In most cases, UV irradiation by itself did not have a significant impact on controlling biofilm formation in the various models. Improved synergetic effects of UV appear to play an important role in mitigating biofilms and preventing regrowth [6,20].
There is a need for a further investigation in order to determine and optimize all the parameters influencing bio-fouling control while using UV as a pretreatment strategy (wavelengths, doses, and continuous or in cycles exposure). It is proved that UV did not have a residual effect after irradiation and that biofilm control improves when greater UV doses are given, and greater levels of inactivation of suspended cells are obtained.
Underwater brush based technology
Brush-based cleaning technologies are the most used in the underwater cleaning surfaces process, and its productivity is high comparing to others (200
Brush based cleaning depends on removing built up material with rotary brush (single or multiple, man held or robotized) by applying mechanical and frictional forces on the surface (See Figure 5). The use of brushes is a very abrasive cleaning method and can cause damage to the original surface or underlying paint. Brush cleaning is also unable to capture cleaning waste, which can contain paint residue. The result may be that toxic materials are released into the environment as a consequence of cleaning process. We attributed a high contaminant risk to underwater cleaning using brush technology. In addition it needs changing and replacing cleaning brushes according to the shape of the surface, the type of the buildup materials, and wearing.

Brush based underwater surface cleaning
Underwater pressure (water jets)
The pressurized water jets for cleaning steel structures, plates, bio-fouling growth removal from underwater structures, hulls, etc. is becoming widely used with the development of this technology, water jets can be easily controlled by reducing or increasing the pressure from the pump and by changing the distance and the attack angle. A water jet's effectiveness is dependent on the surface, pressure of water, jetting angle, and distance from the cleaning surface. Jet nozzles have been developed to enable effective cleaning of the surfaces underwater. Water jet gun which used to remove fouling are classified in two types of available systems: cavitation and non-cavitation systems.
a. Cavitation system:
This system uses nozzles designed to induce cavitation at the surface for cleaning, which emit microscopic gas and steam bubbles that collapse when touching treated surface (See Figure 6). Lower water pressure (70–150 bar) can be used to produce high pressure (15×104 bar) at the treatment point remove built up materials, bio-fouling are destroyed during this process with a relatively good cleaning speed (600–1500

Cavitation system, CAVI-JET Pistols and Robot [25]
Tests showed that using cavitation nozzles for underwater cleaning can remove various types of fouling from different underwater structure, while at the same time, minimizing the damage to the surface and the coating. Although it provides increased control of the cleaning process, the perceived increase in the cost of the equipment is still thought to be prohibitive.
b. Non-cavitation system:
Rely only on the energy contained in the water (cold or hot) itself, and thus require a higher operating pressure (500–1000 bar) to achieve the same cleaning effectiveness as cavitation systems (See Figure 7). System with low pressure jetting will be sufficient to remove effectively and safely the layer of slime from the treated surface [12], some robotised system are patented [21], and some are available for cleaning bio-fouling or removing paint: HydroCat [22], M2000Robot [26], WCRSRR Robot [27], CleanHull [28], V-Robo [29], Vacuum and Magnetic Lizard [30], Octopus [31].

Non-cavitation water jets systems
Though in both cavitation and non-cavitation water jets used for underwater surface operations must contain a zero thrust nozzle which discharges a second stream of water in the opposite direction of the cleaning stream to negate the thrust and permit to scan the surface easily and efficiently.
Table 1 illustrates a performance evaluation of the different underwater cleaning surfaces.
Performance evaluation of the most common underwater surface cleaning technologies

4.2. Enabling robot and existing solutions
Underwater operations present unique challenges and inquiries for robotic applications. These can be attributed in part to limited sensing capabilities and to locomotion behaviors requiring control system adapted to specific tasks or changes in the environment.
From teleoperated procedures, to providing instruction, to fully autonomous operations, enabling autonomous capabilities is fundamental for the successful deployment of underwater robots. In general humans are limited in underwater missions in duration and depth; for that, the underwater environment holds many opportunities for using of robotic systems. At the same time, limited visibility, hazardous surrounding, in addition to the external forces applied to the robot from water currents make underwater operations very challenging.
In this subsection we present an overview of the approaches used during underwater mobile robots. We present adhesion systems used to be on or close to the desired surface. We then present underwater locomotion mechanisms to maintain a trajectory in this medium.
4.2.1. Adhesion systems
For keeping the robot on the surface also in vertical or overhanging sections, the normal force (FN) has to be sufficient. This function is called adhesion. The most important adhesion principles in the field of climbing robots (mechanical, magnetic, pneumatic, etc.) and we will discuss their influence on locomotion, mobility and size of the robot. For climbing on vertical or even overhanging surfaces, the normal force (FN) between robot and surface has to assure enough friction for holding the robot on spot and generating a traction force (FT).
Adhesion principles can be mainly distinguished among two criteria:
Physical principle generating the adhesion force (e.g. magnetic, pneumatic)
Energy need for generating the adhesion force (passive or active)
Mechanical adhesion:
Cleaning tools or underwater robots are close to the surface through mechanical structures, these systems are designed to move in three dimensional space, others adopts ropes to move different types of surfaces generating the adhesion force as a resultant of caused by the gravity and the rope traction.
Mechanical adhesion depends on defined surface and defined task of cleaning by using articulated arm or mechanism (See Figure 8), and this solution is effective in full cleaning (200

Magnetic force adhesion:
The magnetic adhesion is an alternative principle can be adopted when a ferromagnetic surface is available. Strong adhesion force is generated by using simple permanent magnets or current electromagnets.
Most climbing robots for cleaning ships and tanks surfaces take advantage of the fact that most of them are made out of ferromagnetic steel which allows for increasing the normal force between robot and surface by using a magnetic field that passes through the robot and the surface (See Figure).
Magnetic attachment can be highly desirable due to its inherent reliability. This method is fast, but implies the adoption of heavy actuators for movement. Patented robot [21], HISMAR robot [19], M2000 robot [26], WCRSRR robot [37, 27], EFToR V2 robot [4, 32, 34], Hydro-Crawler [38], Octoppus [31], Magnetic Lizard [30].
Despite that, magnetic attachment is useful only in specific environments where the surface is ferromagnetic and therefore, for most applications it represents an unsuitable option. Basically three possible configurations can be distinguished: in the feet of a robot, in the chassis, or directly in the wheels or tracks of the robot.
Electromagnets vs. permanent magnets
The most frequent solution is the use of electromagnets or permanent magnets to adhere to the surface, combined with wheels or tracks to move along it.
Suction force adhesion:
The most frequent approach to guarantee the robot adhesion to a surface is to use the suction force. The vacuum type principle requires light mechanisms and is easy to control. This operating principle allows the movement over arbitrarily surfaces, made of distinct types of materials, and can be implemented by using different strategies. Passive suction cups similar as the ones used on car-windows for fixing devices, curtains or toys. An example for such a robot is CLAUS [39].
Vacuum can be produced by using an electrical vacuum generator or by external hydraulic vacuum generator (Venturi effect) connected to the robot by flexible tubes, vacuum pump is installed on the robot that keeps the negative pressure in each cup at constant level if significant leakage occurs (See Figure 3). Examples for such robots are V-ROBO [29, 40], RIMINI [41, 42], ROMA II [43], Vacuum Lizard [30], Sky Cleaner 3 [44], RAMR1 [45], crawling robot for cleaning [46, 47].
Sliding vacuum chambers is another type of creating negative pressure. Examples for sliding vacuum chambers are the first two prototypes in the Alicia-family [48, 49], or the CROMSCI [50], the active versions of negative pressure adhesion(suction cups, vacuum chambers) are more common for, while passive suction cups only work reliably on very clean surfaces due to leakage problems.
Usually, redundancy is needed to increase the reliability, and more than one vacuum cup is used to prevent loss of pressure (and adhesion force) due to surface curvature or irregularities.
Nevertheless, this type of attachment has some associated drawbacks. The suction adhesion mechanism requires time to develop enough vacuum to generate sufficient adhesion force. This delay makes it slow in locomotion.
Another issue associated with suction adhesion is that any gap in the seal can cause the robot to lose the contact. This drawback limits the suction cup adhesion mechanism to relatively smooth, non-porous and non-fractured surfaces.
Vacuum pumps external to the robot imply the need for a safety cable, with the inherent problems of the umbilical cord for the robot with its mobility and dynamics.
Thrust and propulsion force adhesion:
This adhesion principle has been developed for working in submerged applications. These machines mainly allow performing in-service inspection of the horizontal and the vertical surfaces of oil, petroleum, chemical storage tanks cooling tunnels and marine structures while submerged in the liquid, thereby saving the cost of emptying, cleaning and manually inspecting the surfaces.
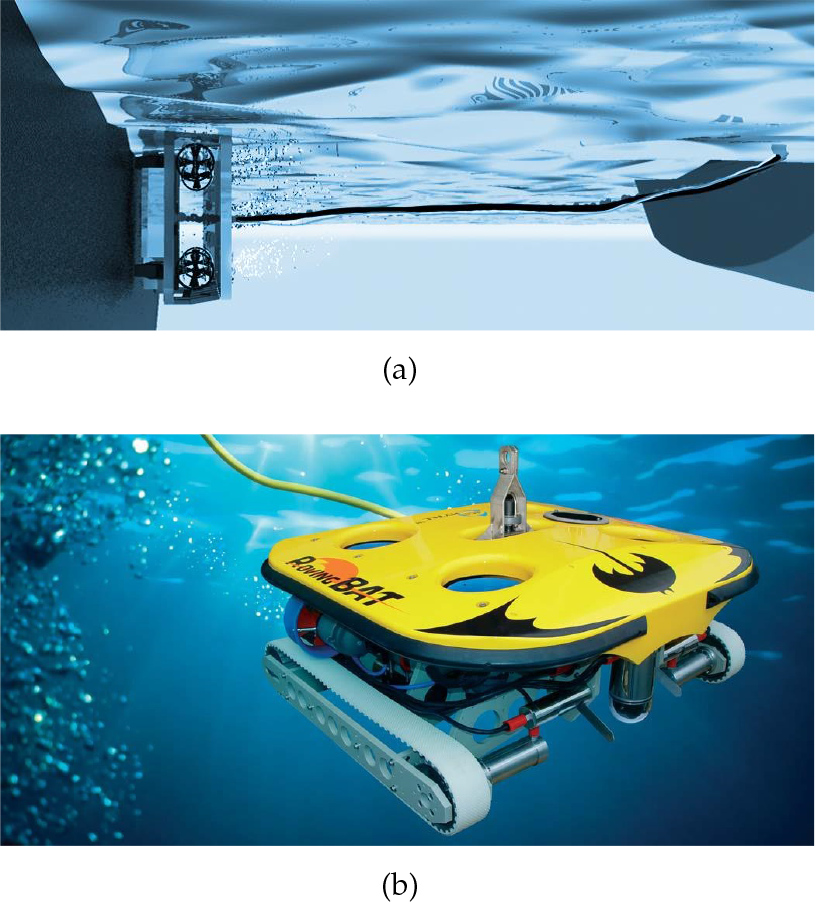
One or more propeller, mounted on top of the vehicle, provides the thrust force for adhesion to the surface, and with suitable locomotion system the movement will be possible for all types of submerged surfaces (See Figure 10). Robots equipped with at least two independent, speed controlled, thrusters can move in three dimensional space using their hydrodynamics properties to localize on the surface (diving from point to point).

Suction adhesion: RIMINI [41]
After contact with surface, thrust forces generated by these thrusters guarantee the adhesion to the surface, while the locomotion system moves the robot to scan the surface. The vehicle maneuvers freely on the surface and can be driven down from a vertical to horizontal surface and back on to it. ROVING BAT is an inspection robot [51], CleanRov is a cleaning robot [28].
Active vs. passive principles of adhesion
A very important criterion for distinguishing the different adhesion principles is their need for energy consumption. Active versions of each principle are normally much stronger than the passive ones, but they suffer from the disadvantage that the robot would fall down in case of a power shutdown.
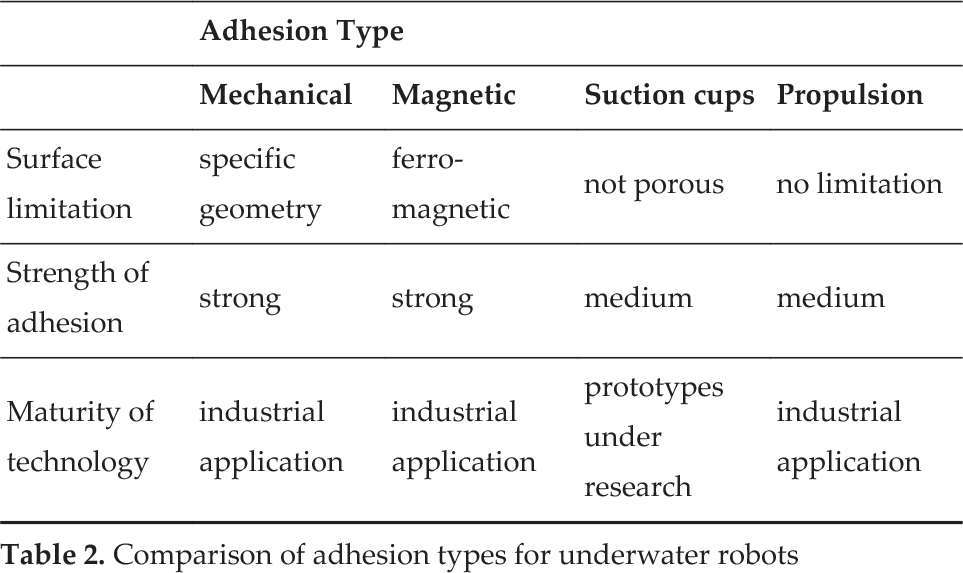
A comparison of available adhesion types properties for underwater robots is presented in Table 2.
Comparison of adhesion types for underwater robots
4.2.2. Locomotion systems
A major goal in this field is in developing capabilities for robots to autonomously decide how, when, and where to move. Autonomous robot locomotion is a major technological obstacle for many areas of robotics, such as underwater [52].
Locomotion can be distinguished according to:basic motion concept (Rolling or Swinging-legged), temporal characteristic of contact(continuous or discrete), or type of contact (little footed or big footed. According to M. Yim classification [53].
In this subsection are analyzed the characteristics of the main locomotion technologies implemented in underwater robots, namely the vibrator, crawler, propelled, wheeled, and tracked types.
Vibration:
This motion is created by simply installing a vibrator inclined or perpendicular to the platform, and this gives the robot self-propulsion while adhering to the surface. This method is simple in configuration and has the advantage of a small and light design. Meanwhile it is less stable and the position control is more complicated (See Figure 11).
Crawling (Sliding Segments) locomotion:
This locomotion type is the simpler alternatives in motion and control often make use of sliding or articulated segments. Mostly used with suction adhesion or magnetic adhesion that grabs to surfaces in one place and releases the others, in order to move (See Figure 12).

Vibration locomotion: VAV250 robot from V-ROBO family [40]
Sky Cleaner [44], VDG300 from V-ROBO family [40], W-Climbot [54], Alicia3 [55], RAMR1 [45], Inchworm robot(magnetic adhesion) [56] are examples of this type of motion.
The main disadvantage of this solution is the difficulty in crossing cracks and obstacles and the discontinuity in motion.
Propulsion (Diving) locomotion:
The diving type robots make use of thrust force developed by propellers, jets, or fin to move but are used in very restricted and specific applications (See Figure 13).

The contact between the robot and the surface is maintained though a number of active or non-active wheels or by tracked system. The thrust force is controlled by amplitude and direction to the surface to produce the needed force to overcome the predicted hydraulic force and gravity. Slipping of this robot occurs for abrupt changes in underwater current direction or speed. This locomotion is used in MONSUN II [59], URIS [58], C-RANGER [57], HAUV [60], KORDI ROV [61], KOS ROV [62].
A variable buoyancy system is used to change buoyancy around neutral; the system usually contains a number of tanks that can be filled with water or gas. This system enables the robot to swim to a given depth with changing buoyancy [63].
Wheel driven and tracked locomotion:
Another form of locomotion is to adopt wheels. These robots can achieve high velocities, and are the most efficient on almost flat surfaces. This is due to the fact that an ideal rolling (but not slipping) wheel loses no energy. A wheel rolling at a given velocity needs no input to maintain its motion [64,65].
This type is often used in mobile robotics due to easy mechanical implementation of the wheel. CleanRov [28], HISMAR robot [19], EFToR V2 robot [4], VM400 from V-ROBO [29, 40], RIMINI [41, 42], Vacuum and magnetic Lizard [30].
The research in wheeled robotics is focused on traction and stability in rough terrain, maneuverability and control. The major concern in the motion planning of wheeled robots is the holonomic that the robot is subject to. These are decided by the type of wheels, number of wheels and the direction of the axes of rotation of the wheels.
Wheeled locomotion offers some disadvantages, especially in case of omnidirectional vehicles using spherical or Swedish wheels, in rough, loose terrain, due to the increasing rolling friction which causes power inefficiencies; furthermore wheeled platform are just able to cross gaps smaller than wheel diameter (See Figure 14).

Tracked locomotion is another solution, where vehicle is steered by moving the tracks with different speed in the same direction or in opposite direction. The use of tracks offers a much larger area of surface contact, so the traction on loose surface is much better than wheels; furthermore the vehicle is able to drive through rougher surfaces (able to cross larger gaps). Due to the large contact patches, tracked vehicles usually change direction by skidding, where a large part of the vehicle is in contact with the surface as it slides across it, so more space is needed to change the orientation. The skidding movement has some other defect that the friction during steering causes additional power consumption. Furthermore the exact change in position and direction is hard to predict due to the sliding movement and the variation of friction. WCRSRR robot [37, 27], Hydro-Crawler [38], ROVING BAT robot [51].
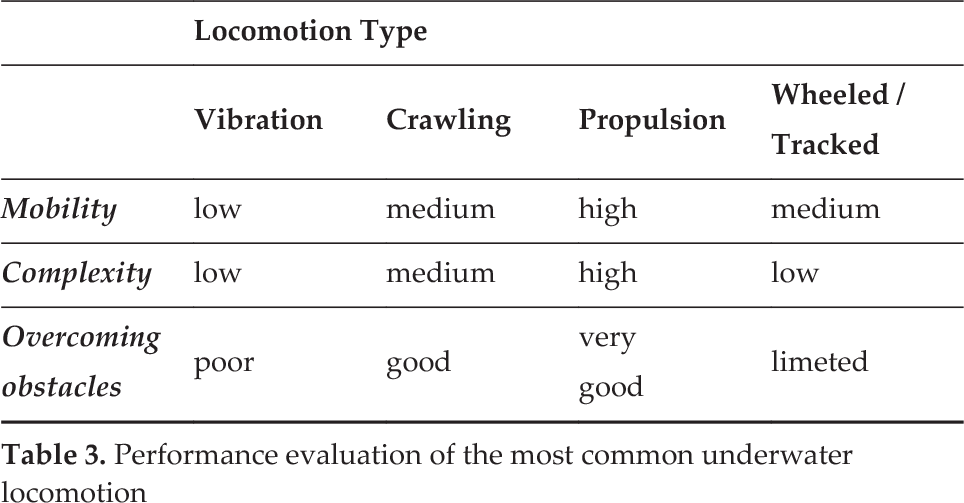
A performance evaluation of different underwater locomotion system is shown in Table 3.
Performance evaluation of the most common underwater locomotion
5. Crawling Robot for Cleaning Underwater Surfaces
We proposed an underwater crawling robot shown on Figure 15 having four main subsystems: locomotion(crawling, rotation and stepping), adhesion(suction cups), cleaning(pressurized water jet), and neutralization of reaction forces (water jet reaction), details given in a previous publication [66].


Crawling robot for cleaning underwater surfaces
The locomotion subsystem is the basic component providing all movements of the robot. We selected this mechanism because: it adapts to the surface, it can be used for different types of surface material, it is a simple mechanism, and it is stable with low center of gravity and large base support in the cleaning process. We consider the cleaning operating on a smooth nearly flat local 2D-space around it. Therefore the robot mechanism needs minimum two active degrees of freedom (2DOFs) to move. In addition, additional passive DOFs are needed to conform the robot's structure to the concavity/convexity of the surface.
The seven links of the robot are connected through six joints, each joint has two rotational DOF, two motors are used one for crawling and another for rotation and the rest joints are passive in both axes. The robot has a form of two parallel bipeds connected with three parallel links. To realize the crawling motor actively controls the angle between the legs to perform desired step size. At the same time, both bipeds with the connecting links form two parallelograms with three links parallel in all possible configurations. Four suction cups are attached to the four corner joints, each cup is surrounded by three small free wheels to minimize the friction of movement when any of these cups is not enabled. Due to the limitations of most of the adhesion techniques, we selected suction cups for their light weight and simple control that allows movement over arbitrary surfaces made of non-ferromagnetic materials.
The cleaning subsystem contains two water jets directed on controllable varying angle to the surface. They are installed on one of biped links. The jets slide on these two links and a separate control system regulates the linear speed and time of cleaning in accordance to the nature of bio-fouling.
In the cleaning subsystem, the force of the water being discharged from the jet nozzle creates an equal and opposite reaction, which makes the nozzle recoil in the opposite direction of the water flow. This effect becomes stronger as water jet flow increases. The cleaning water jets are directed at certain angle to the surface depending on the needs of the cleaning process. Therefore, the generated reaction force drags the robot away from the surface, for compensating and neutralizing the reaction force four dedicated waters jets are installed on the four links. While robot is in contact to the surface, thrust forces generated by these jets reinforce the adhesion. The water flow through the balancing jets is regulated such that the vector sum of all forces is nullified.
6. Conclusion
The survey has shown that under water cleaning bio-fouling buildup materials is a challenging problem, where the treated surfaces are different in shape dimensions and properties, the variety of cleaning technics in efficiency and speed, and the operating conditions all play a role.
The majority of existing solutions relies on divers working in shifts using cleaning devices. While robotized systems are for maintenance and inspection and the cleaning robots are limited to ferromagnetic surfaces and few other limited solutions.
What areas need further research? Studies are required on effective removal of bio-fouling growths without damaging the surface; the evolution of water jet technologies is promising in this field. Additional work needs to be done to develop an underwater platform able to do the cleaning on different surfaces with flexibility in motion while taking advantage of the properties of this medium.