
Abstract
This paper proposes a method to produce the stable walking of humanoid robots by incorporating the vertical center of mass (COM) and foot motions, which are generated by the evolutionary optimized central pattern generator (CPG), into the modifiable walking pattern generator (MWPG). The MWPG extends the conventional 3-D linear inverted pendulum model (3-D LIPM) by allowing a zero moment point (ZMP) variation. The disturbance caused by the vertical COM motion is compensated in real time by the sensory feedback in the CPG. In this paper, the vertical foot trajectory of the swinging leg, as well as the vertical COM trajectory of the 3-D LIPM, are generated by the CPG for the effective compensation of the disturbance. Consequently, using the proposed method, the humanoid robot is able to walk with a vertical COM and the foot motions generated by the CPG, while modifying its walking patterns by using the MWPG in real time. The CPG with the sensory feedback is optimized to obtain the desired output signals. The optimization of the CPG is formulated as a constrained optimization problem with equality constraints and is solved by two-phase evolutionary programming (TPEP). The validity of the proposed method is verified through walking experiments for the small-sized humanoid robot, HanSaRam-IX (HSR-IX).
Keywords
1. Introduction
The walking motion of a humanoid robot is one of the representative research topics in the field of robotics, and various walking-pattern generation methods for stable walking have been developed [1–4]. The 3-D linear inverted pendulum model (3-D LIPM) is one of the most widely used methods of generating a walking pattern for humanoid robots [1]. In the 3-D LIPM, to decouple the sagittal and lateral centre of mass (COM) motion equations, the vertical COM motion is not considered. Various walking-pattern generation methods have been developed based on the 3-D LIPM [5–9]. However, the constant COM height only allows the humanoid robot to walk with a limited step length and makes the walking unnatural. Thus, it is necessary to provide the vertical COM motion for the walking-pattern generation method based on the 3-D LIPM, for the up-and-down motion of the upper body and a longer stride.
Among the previous studies into the generation of the vertical COM motion of the 3-D LIPM, there was an approach involving the generation of an up-and-down COM motion using indexes such as the knee-stretch index and the knee-torque index [10]. An attempt to generate a COM motion constrained on a parametric surface, which is the COM height from the position of the swinging leg, was studied [11]. Up-and-down COM motions using the vertical pivot motion of the 3-D LIPM [12] and an analytical solution produced by a dynamic 3-D symmetrization method [13] were also introduced. An up-and-down COM motion was generated using a virtual plane method [14, 15]. There was also an attempt to develop a hip-pattern generator using the sinusoidal function, and a foot-pattern generator for heel-strike and toe-off motions [16]. In addition, approaches to generate a vertical COM motion for minimizing energy consumption were studied [17, 18]. Meanwhile, there have also been studies of walking-pattern generation methods using a central pattern generator (CPG) for a humanoid robot [19–25]. The CPG is the representative biologically inspired method [26], which produces rhythmic signals using neural oscillators (NOs) [27]. The humanoid robot could maintain its balance by using sensory feedback in the CPG while walking. However, in these previous studies, the humanoid robot walked unnaturally and it was unable to modify its walking pattern in real time.
In order to solve these problems, a novel method for stable walking with a vertical COM motion, based on the 3-D LIPM, was proposed [28, 29]. The effectiveness of the proposed algorithm has been verified by computer simulations and experiments, along with a comparison of the vertical COM trajectories generated by the proposed evolutionary optimized CPG and the sinusoidal function utilized in [16].
This paper proposes a method to produce the stable walking of humanoid robots by incorporating the vertical COM and foot motions, which are generated by the evolutionary optimized CPG, into the modifiable walking pattern generator (MWPG) [6–9]. The MWPG extended the conventional 3-D LIPM by allowing a ZMP variation. The disturbance caused by the vertical COM motion is compensated in real time by the sensory feedback in the CPG. In this paper, the vertical foot trajectory of the swinging leg, as well as the vertical COM trajectory of the 3-D LIPM, are generated by the CPG for the effective compensation of the disturbance. Consequently, using the proposed method, the humanoid robot is able to walk with the vertical COM and the foot motions to be generated by the CPG, while modifying its walking patterns by the MWPG in real time. The CPG with the sensory feedback is optimized to obtain the desired output signals. The optimization for the CPG is formulated as a constrained optimization problem with equality constraints, and is solved using two-phase evolutionary programming (TPEP) [30]. The equality constraints for the optimization of the CPG are more detailed than those of [29]. The validity of the proposed method is verified through walking experiments involving the small-sized humanoid robot, HanSaRam-IX (HSR-IX). A walking experiment using a constant COM height is first performed, and then the results are compared with those of the walking experiment using the vertical COM and foot motions generated by the CPG. To demonstrate the effectiveness of the sensory feedback in the CPG, the results of the walking experiments both with and without the sensory feedback are compared.
This paper is organized as follows. Section 2 presents the walking motion using the vertical COM and foot motions produced by the evolutionary optimized CPG. The generation of the walking pattern by the MWPG is described. Next, the CPG used for generating the vertical COM and foot motions is proposed. The CPG is reviewed and the trajectory generation using the CPG is explained along with the sensory feedback. The constrained optimization for the CPG is also proposed. Then, the overall procedure of the proposed method is explained. Section 3 presents the experimental results and the conclusion follows in Section 4.
2. Walking Using Vertical COM and Foot Motions Produced by an Evolutionary Optimized CPG
2.1. Walking Pattern Generation
The walking of the humanoid robot consists of single and double support phases. In the single-support phase, the primary dynamics of the humanoid robot is simplified as a 3-D LIPM under the assumptions that the robot's mass is concentrated to a single point and that the support leg is a weightless telescopic limb, as shown in Fig. 1 [1]. In the 3-D LIPM, in order to decouple the sagittal and lateral COM motion equations, the COM height is set to a constant value. In other words, the vertical COM motion is not considered. The following equations present the COM motions of the 3-D LIPM in the MWPG.

3-D LIPM. Z c is the COM height.
Sagittal COM motion:

Lateral COM motion:

where
The first and second terms on the right-hand side of (1) and (2) are the homogeneous solution component and the particular solution component of the dynamic equation of the 3-D LIPM, respectively. In the conventional 3-D LIPM, it is assumed that the ZMP is fixed at the contact point by utilizing only the homogeneous solution component. Consequently, in the single support phase, the COM motion of the 3-D LIPM is predetermined and unmodifiable. This means that the humanoid robot is unable to independently modify the elements of the walking pattern, i.e., the single and double support times, the sagittal and lateral step lengths and the foot direction of the swinging leg. However, in the MWPG, by utilizing the particular solution component for the ZMP variation, the COM position and velocity can be changed independently at any time during the single support phase [6–9]. Thus, the MWPG enables the humanoid robot to modify the elements of the walking pattern independently by means of the ZMP functions

where
For the CS, the WS of the 3-D LIPM is derived [6–9]. Then, the sagittal and lateral COM trajectories satisfying the WS are achieved from (1) and (2). In the MWPG, the vertical COM motion is not considered like the other conventional 3-D LIPM methods. However, in this paper, the vertical COM trajectory of the 3-D LIPM and the vertical foot trajectory of the swinging leg are generated by the CPG, in order for them to be incorporated into the MWPG.
2.2. CPG for Generating Vertical COM and Foot Motions
2.2.1. CPG Structure
The sequence of extension and flexion of the joints enables biologically rhythmic locomotion. When one side of the body part is extending, the other side is flexing, and extension and flexion occur alternately during the rhythmic motion. For the modelling of this biological system, Taga devised the CPG structure [26]. In the CPG, multidimensional rhythmic signals are generated endogenously without requiring a rhythmic sensory or central input, and these signals are adapted to environmental perturbations using sensory feedback. To generate the rhythmic signals, Matsuoka's NO is utilized, of which the neuron is as follows [27]:

with

where the subscripts i and j denote the indexes of the neurons, ui and vi are the inner state and self-inhibition state, respectively, and c is the external input signal that affects the output's amplitude. β and

The neuron's structure. The subscripts i and j denote the indexes of the neurons, ui and vi are the inner state and self-inhibition state, respectively, and c is the external input signal. β and
In the CPG structure, the rhythmic signals are generated by Matsuoka's NOs in (3), each of which consists of an extensor neuron (EN) and a flexor neuron (FN). They are interconnected in the same NO and produce the flexion and extension signals as shown in Fig. 3. Through the effects of this relationship, the rhythmic signals are obtained as follows [26]:

where the subscripts i and j denote the indexes of the NOs, and the superscripts e and f denote the EN and FN, respectively.

NO structure for the CPG. The subscripts i and j denote the indexes of the NOs and the superscripts e and f denote the EN and FN, respectively.
2.2.2. Generation of Vertical COM and Foot Motions Using a CPG
In this paper, the CPG structure is composed of two NOs for the vertical COM motion of the 3-D LIPM and the vertical foot motion of the swinging leg, as shown in Fig. 4. Using the NO, the vertical COM trajectory of the 3-D LIPM is generated as follows:
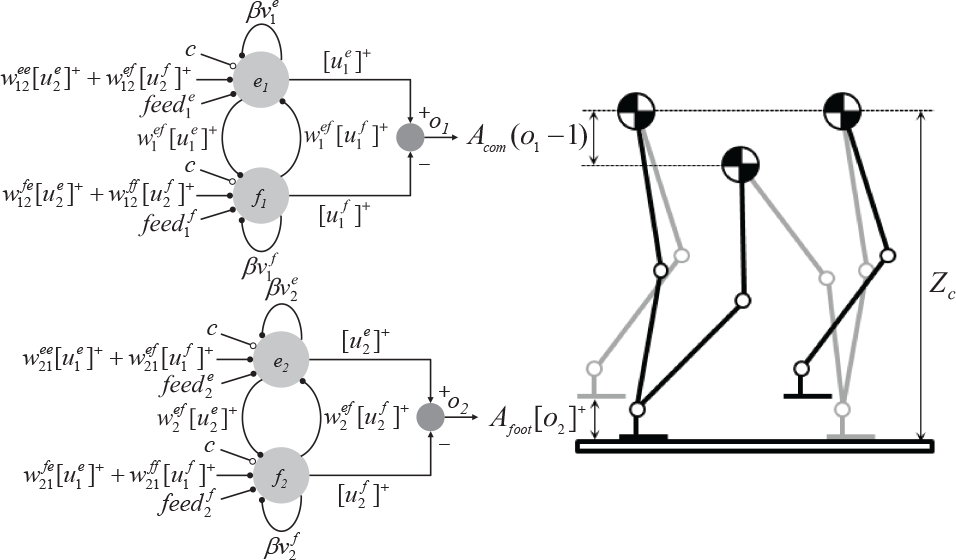
CPG structure for generating vertical COM and foot motions.

where Zc is the initial COM height,

where
Since the vertical COM motion of the 3-D LIPM violates the assumption that the COM height should be constant in the conventional 3-D LIPM, the vertical COM motion of the 3-D LIPM causes disturbances while walking. To compensate for this disturbance, the sensory feedback of the NOs are utilized. If the robot stands motionless, the sum of the ground reaction forces (GRFs) acting on the feet is equal to the robot's weight. On the other hand, it oscillates around the weight of the robot while walking with a vertical COM motion, which causes the disturbance. Thus, the following sensory feedback parameters are designed to improve the robot's stability while walking with a vertical COM motion, by minimizing the oscillation of the GRFs on the feet:

where
2.3. Constrained Optimization for the CPG
For the minimization of the oscillation of the GRFs on the feet while walking using sensory feedback and the desired output signals from the CPG, the optimization of the CPG is formulated as a constrained optimization problem. For optimization, the objective function is designed to minimize the oscillation of the GRFs on the feet while walking with the vertical COM motion, satisfying the following equality constraints. The time periods of the trajectories generated by the evolutionary optimized CPG should satisfy the equality constraints on the single and double support times while walking. Note that the output signals generated by the evolutionary optimized CPG oscillate around zero. When the magnitude of the output signals generated by the evolutionary optimized CPG is positive, the corresponding times
Considering the constraints as well as the objective, the following constrained optimization problem was formulated to obtain the evolutionary optimized values of c, τ,

subject to constraints

In the objective function f, the first term in the right-hand side is the sum of the differences between the GRFs and the robot's weight while walking, and the second term P is a penalty value which is assigned when the robot falls down while walking because the constrained optimization problem is the minimization problem. To solve the constrained optimization problem above, TPEP is employed. TPEP is highly suitable for problems with diverse types of constraints and gives better results with respect to the solution's accuracy, convergence stability and computation time [31].
2.4. Overall Procedure of the Proposed Method
Fig. 5 shows the flowchart of the proposed method's overall procedure. Firstly, the CPG with the sensory feedback is optimized off-line by the TPEP considering the equality constraints. Then, at every sample time, the CS, which is predefined or generated by the footstep planner [33, 35], is entered into the proposed method. To satisfy the CS, the sagittal and lateral COM trajectories of the 3-D LIPM are generated using (1) and (2). The vertical COM trajectory of the 3-D LIPM and the vertical foot trajectory of the swinging leg are generated by the evolutionary optimized CPG using (5) and (6), which are modified in real time by the sensory feedback in the CPG in order to compensate for the disturbance caused by the vertical COM motion using (7). The sagittal and lateral foot trajectories of the swinging leg are generated by the cubic spline interpolation. In the double support phase, the COM motions travel with constant velocity. Then, the COM motion of the 3-D LIPM is updated and the leg joint trajectories of the robot are calculated using the inverse kinematics at every sample time. Until the walking stops, these steps are repeated.

Flowchart of the overall procedure of the proposed method
3. Experimental Results
The proposed method was verified with the small-sized humanoid robot HSR-IX, as shown in Fig. 6 [8]. Its height is 52.8 cm and mass is 5.5 kg. It has 12 DC motors with harmonic drives in the lower body and 16 RC servo motors in the upper body. The onboard Pentium-III (667 MHz) compatible PC, running RT-Linux, calculates the proposed algorithm at every sampling time in real time. Since most formulas used in the proposed method have a closed form, the calculation time took less than 1 msec for the onboard Pentium-III compatible PC. Thus, the sampling time was set as 5 msec. Four force sensing resistors (FSRs) are installed on the sole of each foot to measure both the GRFs on the feet and the ZMP trajectory while walking. For stable dynamic walking, in the single-support phase, the ZMP trajectory should be in the foot boundary of the support leg. In the double-support phase, if the ZMP trajectory is in the area bounded by the two feet, the robot is stable. In other words, the ZMP trajectory is a representative and direct stability criterion for bipedal walking. Therefore, the ZMP and GRF trajectories during the walking experiments were provided in order to verify the effectiveness of the proposed method. In the experiments, Zc was set to 23.95 cm. The single and double support times

(a) HSR-IX. (b) Simulation model. (c) Configuration.
3.1. Walking Experiment Using a Constant COM Height
The walking experiment using a constant COM height was performed for comparisons of the ZMP trajectory, GRFs and maximum step length, during the walking experiments using the vertical COM and foot motions determined by the evolutionary optimized CPG. In this walking experiment, the vertical foot trajectory of the swinging leg was generated by a cycloid function instead of the CPG. Fig. 7 shows the measured ZMP trajectory while walking. The ZMP trajectory in the x -axis and y -axis followed that of the foot trajectory with a small variation. One of the reasons for this small variation of the ZMP trajectory is the difference in dynamics between the real robot and the 3-D LIPM. Fig. 8 shows the measured left and right GRFs while walking. Note that the left and right GRFs are different because the mass distribution was asymmetrical in the real robot. It can be seen that the GRFs oscillated, which is another reason for the small variation of the ZMP trajectory. f in (8), which describes the oscillation of the GRFs while walking, was measured as 15341.43 N for walking seven steps and the maximum step length was 5.5 cm. In this paper, the maximum step lengths were decided during the walking experiments by increasing the step length until the workspace-boundary singularities occurred. The workspace-boundary singularities occur when the leg is fully stretched out such that the end-effector is at or very near to the boundary of the workspace. The walking experiments were carried out using the measured maximum step length for each case.

Measured ZMP trajectory while walking with a constant COM height

Measured left and right GRFs while walking with a constant COM height
3.2. An Evolutionary Optimized CPG
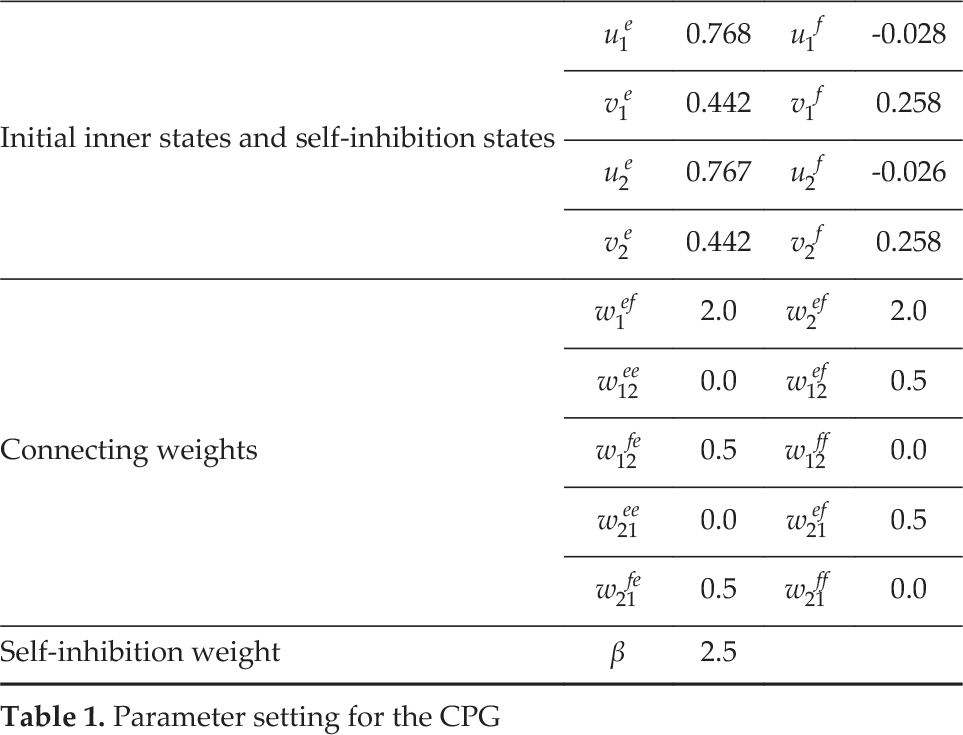
The simulation model of HSR-IX modelled by the 3-D robotics simulation software, Webots [36], was employed for the constrained optimization of the CPG as shown in Fig. 6(b). Tables 1 and 2 present the parameter settings for the CPG and the objective function, respectively, where the following notations are used:
Note that
The optimized parameters afforded by the TPEP are given in Table 3. Consequently,
Parameter setting for the CPG
Parameter setting for the objective function

Optimized parameters generated by TPEP


Vertical COM trajectory of 3-D LIPM and vertical foot trajectories of left and right legs generated by the evolutionary optimized CPG. The thick and thin lines represent the COM trajectories in the single and double support phases, respectively.
3.3. Walking Experiment Using Vertical COM and Foot Motions by an Evolutionary Optimized CPG Without Sensory Feedback
Figs. 10 and 11 show the measured ZMP trajectory, and left and right GRFs while walking using the vertical COM and foot motions that are generated by the evolutionary optimized CPG without sensory feedback. “Without feedback” means that the scaling factors of the sensory feedback,

Measured ZMP trajectory while walking, using vertical COM and foot motions by an evolutionary optimized CPG without sensory feedback

Measured left and right GRFs while walking, using vertical COM and foot motions by an evolutionary optimized CPG without sensory feedback
3.4. Walking Experiment Using Vertical COM and Foot Motions by an Evolutionary Optimized CPG with Sensory Feedback
In this experiment, the same step length was used in the walking experiment without the sensory feedback. The walking experiment using the vertical COM and foot motions generated by the evolutionary optimized CPG with sensory feedback was performed. “With feedback” means that the scaling factors of the sensory feedback,

Measured ZMP trajectory while walking using vertical COM and foot motions determined by an evolutionary optimized CPG with sensory feedback

Measured left and right GRFs while walking using vertical COM and foot motions determined by an evolutionary optimized CPG with sensory feedback

Evolutionary optimized sensory feedback signals in CPG
4. Conclusion
This paper proposed a method for the stable walking of humanoid robots using the vertical COM and foot motions that were generated by the evolutionary optimized CPG. The walking pattern for the humanoid robot was generated by the MWPG. The vertical COM trajectory of the 3-D LIPM and the vertical foot trajectory of the swinging leg were generated by the CPG. The sensory feedback in the CPG was designed to minimize the oscillation of the GRFs while walking with the vertical COM motion. The optimization of the CPG was formulated as a constrained optimization problem and the CPG with the sensory feedback was optimized by the TPEP. The effectiveness of the proposed method was verified via walking experiments using the small-sized humanoid robot, HSR-IX. Consequently, using the proposed method, HSR-IX could walk stably with the vertical COM and foot motions that are generated by the CPG, because the disturbance caused by the vertical COM motion was compensated in real time by the sensory feedback in the CPG. In addition, the maximum step length was longer than that during walking with a constant COM height.
Footnotes
5. Acknowledgements
This work was supported by the new faculty research fund of Ajou University.
This work was also supported in part by the Research Grant of Kwangwoon University in 2015.