
Abstract
This work introduces a novel reconfiguration strategy for a Delta-type parallel robot. The robot at hand, whose patent is pending, is equipped with an intermediate mechanism that allows for modifying the operational Cartesian workspace. Furthermore, singularities of the robot may be ameliorated owing to the inherent kinematic redundancy introduced by four actuable kinematic joints. The velocity and acceleration analyses of the parallel manipulator are carried out by resorting to reciprocal-screw theory. Finally, the manipulability of the new robot is investigated based on the computation of the condition number associated with the active Jacobian matrix, a well-known procedure. The results obtained show improved performance of the robot introduced when compared with results generated for another Delta-type robot.
1. Introduction
Nowadays, flexible manufacturing systems are highly advisable in order to increase, among other issues, the productivity and competitiveness of small and medium-sized manufacturing industries. In this context, a reconfigurable mechanism may be implemented owing to the fact that its topology can be quickly adjusted according to a specific task.
Industrial parallel robots, such as the well-known Delta robot, are currently used in electronic, food and pharmaceutical industries to perform pick-and-place tasks and many other tasks that require translational high-speed motions. A reconfigurable parallel robot can accomplish such industrial tasks more efficiently than a Delta robot, since these mechanisms have high levels of flexibility and the performance required to carry out complex assembly tasks.
In robotics, the reconfiguration concept is presented in [1] as the capacity to change the characteristics of robots when completing arbitrary operations. The main approaches that have been proposed for the reconfiguration of parallel mechanisms, such as the Stewart-Gough platform, are modular and variable geometric designs [2, 3, 29].
A modular manipulator consists of a set of modules that can be assembled into robots with different attributes. Modularity has been used recursively in parallel manipulators; see for example [4–14].
The reconfiguration of parallel manipulators using variable geometry consists of changing some dimensions of the robot with the purpose of generating new postures on the same parallel manipulator. In this context, the following should be cited: a double planar parallel reconfigurable manipulator presented in [15], the reconfigurable platform based on the Stewart-Gough platform [16], the reconfigurable parallel mechanism with an adjustable base designed in [17] and a new family of reconfigurable parallel mechanisms [18]. Furthermore, many authors (including some of the aforementioned) have used the redundancy sometimes generated by reconfiguration of the parallel manipulators for improving characteristics such as stiffness [19, 20, 21], force [22, 23], accuracy [24], increased workspace and singularity-free workspace [25–27], payload-capacity [28, 29], as well as performance indices like manipulability, condition number, global condition, dexterity and global dexterity [30–33].
Although reconfigurable parallel manipulators are a well-documented issue, some aspects thereof deserve in-depth investigated, primarily problems related to structural spaces. On the other hand, it is worth noting that the aforementioned mechanisms have a high level of mechanical complexity and therefore, the construction of physical prototypes can be an expensive option. In this regard, computer simulations generated with virtual prototypes is a cheaper and more viable alternative.
In this paper, a new reconfiguration of a 3-DOF Delta-type parallel robot, based on the concept of variable geometry, is presented. The reconfiguration is applied to a robot named Parallix LKF-2040, which was designed as a didactic version of a Delta-type parallel manipulator at the National Polytechnic Institute (IPN) in CICATA, Queretaro, Mexico [34]. The reconfiguration strategy proposed here is highly versatile, extremely simple and capable of returning to the original configuration and mechanical characteristics of the Parallix LKF-2040. Furthermore, the redundancy generated by the new manipulator allows for improving its kinematic performance, based on the computation of a performance index according to prescribed trajectories.
The paper is organized as follows: In section 2, the current mechanism and the proposed new reconfigurable system is described. The kinematic analysis is presented in section 3. In order to exemplify application of the method, in section 4, a case study is provided. Finally, conclusions are given in section 5.
2. Description of the Proposed Parallel Manipulator
Referring to Fig. 1, the Parallix LKF-2040, used as a base for creating the reconfiguration strategy, is a translational Delta-type parallel robot developed at IPN-CICATA. This manipulator is widely used for teaching purposes, owing to its convenient open architecture [34]. The Parallix comprises three stationary motors disposed angularly on its base through brackets. The motor axes are coupled to a kinematic chain at the bracket level. Although the proposed mechanism closely resembles the famous Delta robot, it is in reality a 3-RUU robot, where R and U represent, respectively, for revolute and universal joints.

The Parallix LKF-2040 parallel manipulator
2.1. Reconfiguration proposal
As demonstrated by [35], the geometry of the fixed platform is the primary variable that significantly influences the workspace of the Parallix robot. Hence, in order to create an improved robot, the following requirements were considered for implementing a reconfiguration strategy of the Parallix robot: it must be mechanically simple, without adding weight and/or actuators to the kinematic chains, be able to change the entire workspace without modifying the lengths of links, increasing versatility without coupling or uncoupling links from the mechanism and minimize the structural space occupied by the robot. In Fig. 2, the conceptual design of the reconfigurable robot meeting such conditions is shown.

Proposed reconfiguration strategy. Patenting in process at the IMPI - Mexico: MX2013006781 (A).
The concept of this proposal is a redundant Delta-type parallel robot consisting of a reconfigurable fixed platform comprising a fixed element and mobile elements, which reconfigure the size and shape of said platform. A linear displacement mechanism moves the base of a non-redundant translational parallel manipulator vertically.
The robot shown in Fig. 2 comprises a reconfigurable fixed platform with a fixed element (6) and three mobile elements in the form of a framing square (7a, 7b, 7c). These framing squares simultaneously modify the radius and height between the axes of the motors (8a, 8b, 8c) and the center of the fixed element (6). In the center of the fixed platform, there is a screw (1) driven by a fourth actuator (8d). A nut (4) coupled to the screw slides along three guide bars (3a, 3b, 3c). The nut moves the framing squares according to the rotation and pitch of the screw (1) through coupling bars (5a, 5b, 5c). It is important to note that the set of components, i.e., screw (1), nut (4), motor (8d) and coupling bars (5a, 5b, 5c), establish a system used here only as a example of a linear displacement mechanism.
Fig. 3 shows the highest and lowest displacement of the mobile elements, generated by a fourth actuator. It should be noted that this configuration is highly versatile, since the mechanism can also be reconfigured with decoupled motions for framing squares from the rest of the mechanism, enabling it to return to the original configuration and mechanical characteristics of the Parallix LKF-2040. Furthermore, by the redundancy effect customized solutions of the kinematic performance of the manipulator, can be obtained.

Vertical displacement position of the mobile elements. (a) Highest vertical displacement position. (b) Lowest vertical displacement position.
Fig. 4 shows the geometrical parameters of the reconfigurable manipulator Parallix.

Geometrical parameters of the mechanism
3. Kinematic Analysis of the Reconfigurable Manipulator
3.1. Position analysis
The forward position analysis consists of finding the location of the moving platform, given the generalized coordinates of the manipulator. This analysis is the equivalent of computing the coordinates of a point on the moving platform. In what follows, the forward position analysis is performed, based on the method introduced in [36, 37].
As an intermediate step, it is necessary to first calculate the generalized coordinate

where d1 is an offset between point Di and the base plane of the nut, d2 is the signed distance between points Di and point Ai and d3 is the perpendicular distance between the screw axis and point Di. Meanwhile, p is the thread pitch of the screw. Then, solving the binomial, we have:

where

Following on, solving Eq. (1) for

Thus, with Eq. (2), the generalized coordinate
Let






where
In order to formulate the closure equations required to solve the displacement analysis of the robot, consider that the moving platform is an equilateral triangle
Following on, the three closure equations can be written as:

that generate

In this way,

where the coefficients

Finally, substituting Eqs. (6) in any of Eqs. (5) produces a second-order equation in the unknown Z as follows:

where

Eq. 8 indicates that the moving platform can reach two different poses. Finally, point P is calculated using Eq. (9) as follows:

Note that owing to the decoupled motion of the fourth generalized coordinate, the reconfiguration strategy does not complicate the forward position analysis as reported for the Delta-type robot when using this method.
The inverse position analysis is the computation of the generalized coordinates given the pose of the moving platform, i.e., when

Solving Eq. (10) produces:

Thus, a few algebraic steps later and by substituting for Qi and Si we have:

where


With the aim to solve

Finally, solving

In Eq. (12), it is important to note that
3.2. Manipulator workspace
In order to show the shape of the workspace and obtain its approximate volume generated by the reconfiguration, the inverse position analysis is applied. Using Eq. (12) and defining discrete configurations for
The dimensions (SI) considered for computing the robot workspace are:
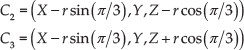
Workspace of reconfigurable parallel Parallix manipulator
The entire reconfigurable manipulator workspace is shown in Fig. 5.(b), where the union of workspaces for different configurations of the mechanism corresponds to a volume of
Fig. 5.(b) shows that the geometrical shape of entire workspace is similar to a sphere, which is desirable in a parallel manipulator. Furthermore, the current workspace is a paraboloid with three concavities and with a smaller volume than the workspace generated by the reconfigurable manipulator. It is worth noting that the significant increase of the manipulator workspace is one of additional advantages obtained by the reconfiguration strategy effects.
3.3. Velocity analysis
Velocity analysis involves determining the velocity state of the moving platform with respect to the fixed platform [36, 37] when the joint rates are known as follows:

The joint rate
Let

where i denotes the i-th kinematic chain. In order to obtain an input-output velocity equation for the reconfigurable manipulator, consider that

And reducing terms we have

Accordingly,

In this way,
3.4. Acceleration analysis
Reduced acceleration state analysis using screw theory for robot manipulators was introduced by [38].
Let

Where

In this way, the brackets

Therefore, the input-output equation of acceleration for the manipulator is:

where
3.5. Evident singular configurations
The singular configurations or singularities, according to [39, 40], can be deduced from Eq. (14). Such configurations are distinct for the fixed platform and the rest of the mechanism, since they are uncoupled mechanisms. However, when there exist combined singularities between these two mechanisms, the reconfigurable manipulator itself will be in a fully singular pose.
In this context, singularities of the Delta-type robot occurs when:
If
If
If
It should be noted that the singularity locus remains the same as for a Delta-type robot. This condition shows that the reconfiguration strategy does not drastically affect the structure of this parallel robot. It is also important to note that the Delta-type mechanism is capable of avoiding singularities by using the redundancy of the reconfigurable robot, which is an additional advantage of the proposed strategy in this paper.
On the other hand, the fixed platform, which is reconfigurable, has its own singular configurations that may occur when
4. Numerical Example
In this section, a numerical example is provided to show that by redundancy customized solutions of the kinematic performance can be obtained. To do so, computation of the condition number is used as a performance index and according to prescribed trajectories.
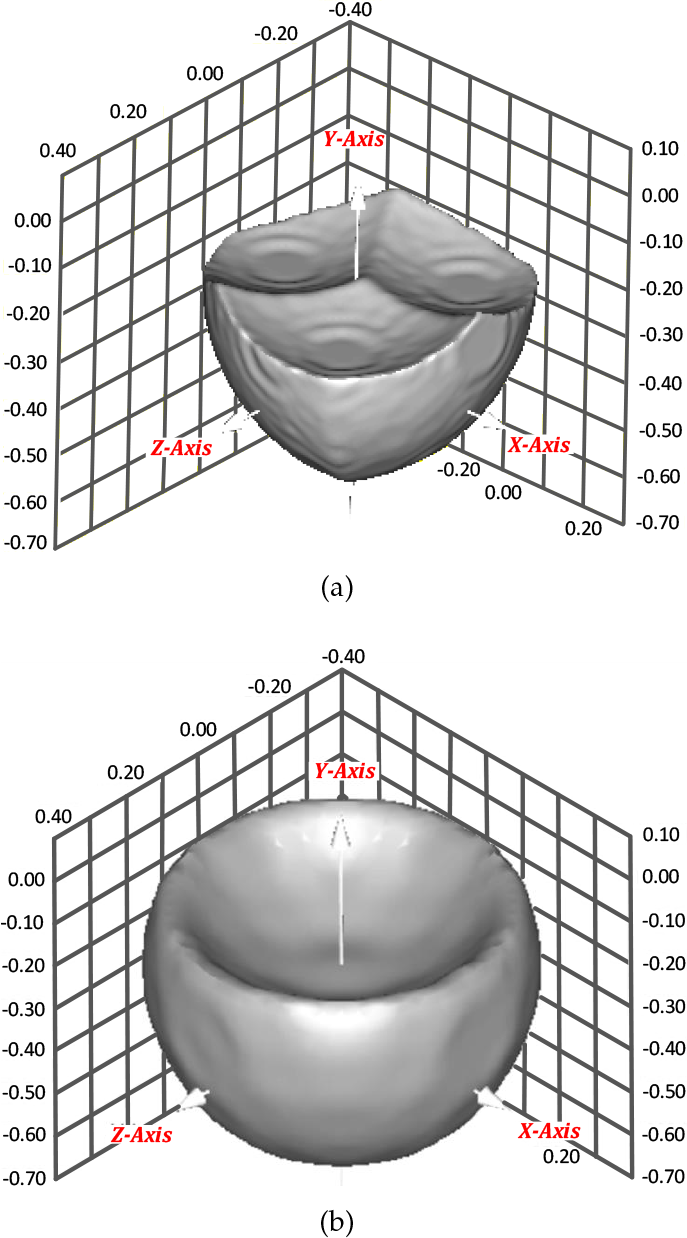
Three Cartesian trajectories of the center P of the moving platform are generated by solving the forward position analysis by considering
Trajectories of the center P at different angles of the reconfiguration coordinate α4
In Fig. 6, the blue and red trajectories are very similar in size, because in the blue trajectory, the mobile elements reconfigure the fixed platform to a length close to that of the original configuration of the mechanism (red trajectory). On the other hand, the third trajectory (black color) has a large radius, because the length and height of the fixed platform is lower than for the other configurations, thereby producing greater angular movement in the actuated links.
The resulting temporal behaviour of the velocity and acceleration of the moving platform, associated with each trajectory shown in Fig. 6, is shown in Fig. 7 and Fig. 8, respectively.

Velocity components of the center of the moving platform

Acceleration components for the center of the moving platform
It is evident that the velocity and acceleration components of the black circle (see Fig. 6) have greater amplitude than in the other two circles, since the length of the fixed platform is shorter than in the other two configurations. In other words, when
4.1. Reconfiguration effects on the manipulator's performance
The Reference [41] defines the condition number as describing the accuracy/dexterity and the closeness to a singular configuration of a parallel manipulator. In the case of a Delta-type robot, the condition number has often been used as a performance index (see the aforementioned references) for evaluating its kinematic performance. In this subsection, the result of this performance index is improved by using the redundancy of the reconfiguration. The condition number is expressed as:

As a first step, it is necessary to calculate the Jacobian matrix

We here use the matrix
Noted that the inverse of the condition number
The best values of

Value of k−1 for each trajectory of Fig. 6. (a) First circle (blue). (b) Second circle (red). (c) Third circle (black).
In Fig. 9.(a) it can be seen that the performance of the proposed mechanism is better than for the Delta-type robot, despite the fact that such a mechanism is close to a singularity at specific trajectory points (e.g., points 43 and 101). In fact, the values of
Figure 9.(b) shows that values obtained for the Delta-type robot are for the most part less than 0.01; however, by using redundancy, the performance of such a robot can be significantly increased, except in points 102 and 116, where the reconfigurable mechanism is close to a singular pose. Nevertheless, it is worth noting that the reconfigurable robot is capable of avoiding many singularities, much more so than the original robot.
On the other hand, Fig. 9.(c) shows similar behaviour of the condition number for both robots, given that a part of this trajectory is performed within the boundaries of the manipulator workspace and therefore, the manipulators are close to a singularity in points 27 and 111. However, it is evident that an improvement in performance of the Delta-type robot has been obtained, primarily at the beginning and end of the trajectory.
It is important to note that by using redundancy, it is possible to achieve better performance in all the trajectories, compared to the performance achieved only with the Delta-type configuration, i.e., when
5. Conclusions
In this paper, a reconfiguration strategy for a Delta-type parallel robot is proposed. The proposal is currently in the patenting process at IMPI - Mexico. The proposed reconfigurable manipulator is highly versatile, since it is able return to the original configuration and initial mechanical characteristics.
Customized solutions of the manipulator kinematic performance can be obtained by using redundancy generated by the reconfiguration. Additional advantages include an increased workspace and avoiding singularities.
The kinematic analysis was calculated by resorting to reciprocal-screw theory and evident singular configurations were analysed. It is worth noting that the manipulator did not change its singularity locus; this represents a significant advantage, since the original mechanism is not drastically affected by the reconfiguration strategy, thereby preserving mechanical simplicity.
Finally, a numerical example of the effects of the reconfiguration on the manipulator performance is presented. A calculation for the best condition number according to prescribed trajectories at different heights of the manipulator workspace was obtained. The results show that by using redundancy, the condition number is improved in each trajectory; accordingly, all performance indices that dependent on the Jacobian matrix are also improved.