
Abstract
In this paper, the global finite-time partial stabilization problem is discussed for a class of nonholonomic mobile wheeled robots with continuous pure state feedback and subject to input saturation. Firstly, for the mobile robot kinematic model, a “3 inputs, 2 chains, 1 generator” nonholonomic chained form systems can be obtained by using a state and input transformation. The continuous, saturated pure state feedback control law is proposed such that the special chained form systems can be stabilized to zero (except an angle variable) in a finite time, i.e., finite-time partial stabilization. Secondly, the rigorous stability analysis of the corresponding closed-loop system is presented by applying Lyapunov theorem combined with the finite-time control theory, and the angle variable can be proved to converge to a constant, moreover, its convergent limit may be accurately estimated in advance. Finally, the simulation results show the correctness and the validity of the proposed controller not only for the chained system but also for the original mobile robots system.
Keywords
Introduction
In recent years, control of nonholonomic mobile robots have attracted considerable attention from the research community because of their practical applications and the theoretical challenges created by the nonholonomic nature of the constraints on it. The stabilization problem is one of the most difficult problems in the nonholonomic control objectives because it has to face a difficult challenge: Brockett's necessary condition for the existence of a smooth time-invariant feedback stabilization is not satisfied [1]. In order to overcome this difficulty, many ingenious feedback stabilization methods have been proposed such as continuous time-varying feedback control laws [2–6], discontinuous feedback control laws [7–11], hybrid feedback control laws [12–13] and optimal control laws [14–17], etc. However, these studies haven't taken into account designing a controller subject to input saturation and such that the closed-loop system converges to zero in a finite time.
Dynamical systems subject to saturation nonlinearity in their input have received significant interest from control system researchers due to their frequent occurrence in various engineering applications [18]. Ignoring saturation nonlinearity in the controller design may lead to performance degradation and even instability of the closed-loop system [19]. Therefore, it is a very important task to design bounded controllers for such nonholonomic mechanical systems, because in practical engineering application, any actuator always imposes limits on the physical inputs. But until now, only a handful of studies have focused on this control issue for stabilizing nonholonomic systems. For a class of type (1,2) nonholonomic mobile robot system, the semiglobal practical stabilizing control scheme has been proposed with saturated inputs in [20]. A model-based controller design method for the global stabilization and the global tracking control with inputs saturation has been discussed by Z. P. Jiang et al in [21] for the traditional nonholonomic mobile robot kinematic systems. Based on which, Hua Chen et al [22–24] have extended the results of [21] to the simple dynamic case. Considering the uncertain nonholonomic mobile robot systems, the global tracking and stabilization control problem of internally damped mobile robots with unknown parameters, and subject to input torque saturation and external disturbances is addressed in [25]. The saturated practical stabilization problem is addressed for a class of nonholonomic mobile robots based on visual servoing feedback with uncertain camera parameters in [26]. And in [27], a saturated output feedback controller is designed for the uncertain nonholonomic mobile robots with the absence of velocity sensors in practice. Besides, the saturated stabilization for the so-called standard chained form systems has been also investigated in [28–29]. However, to our knowledge, almost none of these results mentioned above have involved the convergence rate with continuous control feedback law.
In fact, finite-time stabilization problems have been studied mostly in the contexts of optimality, controllability, and deadbeat control for several decades [30–32]. Compared to the asymptotic stabilization, the finite-time stabilization, which renders the trajectories of the closed-loop systems convergent to the origin in a finite time, has many advantages such as fast response, high tracking precision, and disturbance rejection properties. In the nonholonomic systems control field, some researchers have discussed the finite time stabilization for the (extended) chained form system [33–34], and the finite time tracking control for (multiple) nonholonomic mobile robots [35–36]. Recently, a new concept about the finite-time partial stability has been introduced in [37–39], also the same author has considered the finite-time partially stability of the nonholonomic multichained systems by designing continuous or discontinuous homogeneous state feedback laws to overcome the Brockett's obstruction [40]. However, there is a common flaw among the existing finite-time stabilization methods, that is the input saturation constraint has not been considered simultaneously. Although, we have considered the saturated finite-time stabilization problems with discontinuous switching control strategy in our previous work [26, 41], but many times switching design may cause unexpected oscillatory motion, and thus the continuous, saturated, finite-time stabilizer for nonholonomic systems is all-important.
In this paper, we will consider the global saturated finite-time partial stabilization problem for a class of nonholonomic mobile robots with continuous pure state feedback law. The main contributions can be summarized as the following three respects: 1)A special chained form system is discussed by applying the state and input transformation, for which, the continuous, saturated state feedback controller is proposed such that the closed-loop system can be partially stabilized to zero in a finite time. 2)The stability analysis is presented by Lyapunov criteria and the finite-time control theory, additionally, all the state variables of the closed-loop system (except an angle state) can be proved to converge to zero in a finite time, while the angle variable converges to a constant and its convergent limit can be accurately estimated. 3)Some simulation results show the effectiveness of the controller design not only for the chained system but also for the original mobile robot system. 4) Compared with the existing switching control design method [26], the continuous feedback law may avoid the unexpected chattering phenomenon due to switch methods as many times as desired during the control procedure.
The structure of the article is as follows: Section II gives a formulation of the problem considered in this article and contains some preliminary definitions and lemmas. The main results is presented in Section III. Section IV shows some simulation examples. Finally, a conclusion is shown in Section V.
Preliminaries and Problem Statement
In this section, the definition of finite-time stabilization and its stability criterion are given, and then our considered problem is introduced.
Preliminaries
Definition 1 (finite-time stabilization [31, 33]): Consider a time-invariant system in the form of

where f:
Lemma 1 ([42]): Considering the following system

suppose there exists a continuous function
There exist real numbers
In that circumstance, the origin of system (2) is finite-time stable. If U = U0 = Rn, then the origin of system (2) is globally finite-time stable.
For some nonlinear complex control systems, the traditional finite-time stabilization control strategy may be invalid, thus a modified version of finite-time stabilization has been proposed recently, i.e., finite-time partial stabilization [39–40], we thanks to C. Jammazi for having proposed a class of new extended definition of finite-time stabilization for the first time.
Definition 2 (p-finite-time partial stabilization [39–40]): Let

be defined and continuous on a neighborhood of (0,0) ∊ Rn−p × R p . We assume that
One says that (0,0) ∊ Rn−p × R
p
is p-partially stable in finite time for
The control system

is p-partially stabilizable in finite time if there exists a continuous feedback y → u(y) such that for every y1 ∊ Rn−p,u(y1,0) = 0, and such that (0,0) ∊ Rn−p × R
p
is p-partially stable in finite time for the closed-loop system
Lemma 2 ([40]): For the following nonholonomic chained form system:
where

where

the design parameters

with

where
Definition 3 (saturation function [24, 41]): A saturation function
Remark 1: Examples of such saturation functions in Definition 3, for instance,

Lemma 3 ([31]): For the double integrator system which is described by

Then the origin of (4) is a globally finite-time-stable equilibrium under the bounded feedback control law

where

As shown in Fig. 1, (x,y) is the position of the mass center P of the Type (1,2) mobile robot moving in the plane, θ denotes its heading angle from the horizontal axis. The orientation of the plane of the wheels with respect to the vertical axis are represented by the angles β1 and β2. Positive constant L is a half of the width of the mobile robot, v1, v2 and v3 denote the velocity of castor wheel and two angular velocities of steering wheels, respectively. Then, by introduced in [26, 41, 44–45], the posture kinematic model for the nonholonomic wheeled mobile robot of Type (1,2) can be described by the following differential equations


Type (1,2) mobile robot
In [26], based on visual servoing model, we presented a saturated switching design method for (5) with uncertain visual parameters such that the closed-loop system is finite-time stable. However, it may cause an unexpected oscillation phenomenon due to too many times switching process.
Therefore, for seeking the continuous state feedback to solve the partial-finite-time stabilization problem, first of all, we take the state transformation and the input transformation for system (5) as follow
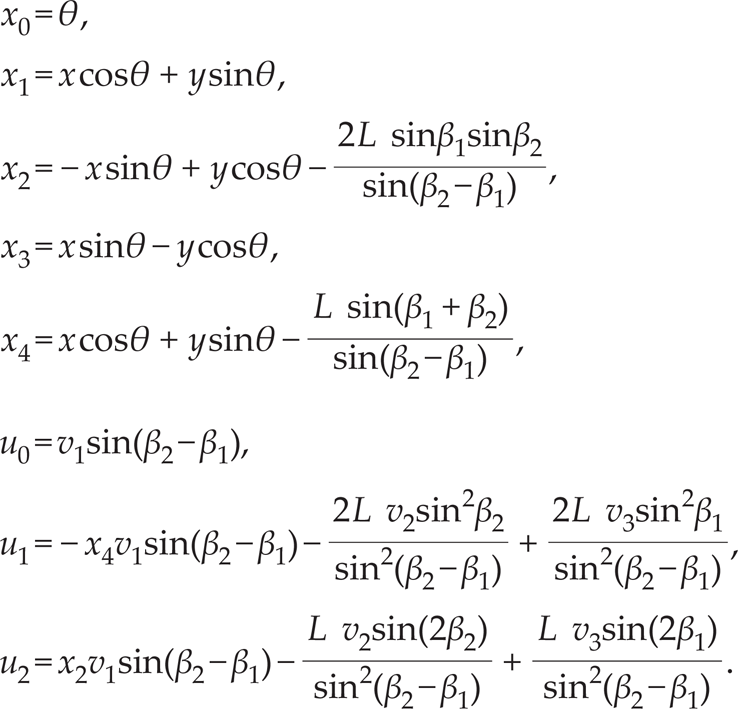
Remark 2: In this institution, these new state or input variables xi,(i = 0,1,2,3,4) and uj,(j = 0,1,2) are also available, because in practical application, engineers usually get the state (x,y) by position sensor, and obtain (θ,β1,β2) by angle sensor. Then it's not difficult to achieve x i ,u j by calculating online according to the formula above. And this state and input transformation is presented such that the nonholonomic chained systems can be obtained, which is an effective way for controlling nonholonomic mobile robots [47].
Then the so-called “3 inputs, 2 chains, 1 generator” nonholonomic chained form system yields [46]

where xi,(i = 0,1,2,3,4) and uj,(j = 0,1,2) are seen as the new states and inputs, respectively. The three inputs are subject to the bounded constraints

where u0max, u1max and u2max are positive constants given in advance.
The control task is to design continuous controllers such that the closed-loop system of (6) is 4-finite-time partial stabilization at the zero equilibrium point under the saturation constraints (7), i.e., we will propose the saturated state feedback laws uj,(j = 0,1,2) such that xt,(i = 1,2,3,4) can be stabilized to zero in a finite time, furthermore, the convergence rate of the rest state x0 can be accurately estimated.
In this section, we will give our main results. Firstly, motivated by the results of C. Jammazi [40], the 4-finite-time partial stabilization for system (6) can be solved with continuous, homogeneous state feedback law.
Theorem 1: Take the following continuous pure state feedback law for the “3 inputs, 2 chains, 1 generator” nonholonomic chained form system (6)

where
Proof.: Omit.
Remark 3: This conclusion can be obtained by a simple mathematical derivation, substituting u1 = x3u0 into (6), we have
which has the same structure as it in (3), therefore, Theorem 1 can be seen as a corollary of Lemma 2. However, it's not easy to satisfy the input saturation constraints (7) by applying this design strategy, and thus a new control method should be excavated to address our problem.
Remark 4: Note that in Theorem 1, we present a nonlinear cross feedback law u1 = x3u0 to obtain a 4-finite-time partially stable closed-loop system of (6), it seems like falling into the conclusion of [40] by using a simple mathematical feedback technique without physical interpretation, but if we consider the physical input limitation constraints, it will be invalid. So, we propose a more practical saturated controller in the next results.
Theorem 2: Given a sufficiently large number M0 > 1, and r i > 0,(i = 1,2,3,4), M11,M12,M21,M22 > 0 satisfy
for system (6), take the saturated, continuous state feedback law
with
where the design parameters

Then system (6) is 4-finite-time partially stable, that is the state vector (x1,x2,x3,x4) can be stabilized to zero in a finite time, and the rest state x0 converges to a constant.
Proof.: First, we prove that (x1,x2) and (x3,x4) of the following subsystems (12)–(13) can be stabilized to zero by the controller (9) in a finite time.


Substituting u1 into (12), we have

The corresponding double integrator system is

By Lemma 3 and recalling its proof in [31], there exists a finite time T1 such that when t ≥ T1, all the states of system (15) can be driven into a region D1 defined as

in which, the saturated controller

Take the Lyapunov function for (15) with negative degree of homogeneity −α,

as defined in Lemma 3,

Substituting (16) into (15), calculating the time derivative along its closed-loop system, there must exist a constant c > 0 such that

Next, for system (14), the following two cases are discussed.
If
According to Lemma 1, in this case, the state (x1,x2) of subsystem (12) can be stabilized to zero in a finite time.
As for another situation, if

Note that once the state (x1,x2) of system (15) has been driven into D1 and in which

Because

from (19), one can obtain

By applying Lemma 4, we have

From (11), we have

and because 0 < Λ i ≤ γ < 1 − δ, (i = 1,2), then

Substituting the inequality above into (18), we have

note 0 < γ + δ < 1, then according to the criterion of finite-time stability in Lemma 1, controllers (9)–(10) can stabilize the subsystem (12) in a finite time.
Similarly, two other states x3 and x4 can be proved to converge to zero in a finite time, furthermore, in this control process, according to the structure characteristic of subsystem (12)–(13), the state (x1,x2) remains at the origin equilibrium point. After that, from (9), we have u0 ≡ 0, it means the state x0 finally converges to a constant, i.e., system (6) is 4-finite-time partially stable.
On the other hand, it's not difficult to prove that the controllers (9)–(10) satisfy the saturation constants (7) by choosing proper design parameters (8)–(11) given in advance. This completes the proof of this theorem.
Remark 5: The p-finite-time partially stabilization is important to engineering practice, for example, state x0 denotes the angle θ, it may only to be regulated to a constant angle while other position must be driven to a specified point such as the origin equilibrium point. But also, it's very critical to estimate the convergent limit of the angle x0.
Remark 6: Then design parameters can be selected one by one according to Theorem 2, for example, given M0 > 1, uimax > 0,(i = 1,2,3), from (8), we can choose M21,M22 > 0 satisfying
Theorem 3: Assuming | x(0) | ≤ ε/2 for any given ε > 0, where

Then (0,0) ∊ R × R4 is 4-partially stable in finite time for the closed-loop system (6) with the saturated, continuous pure state feedback u0, u1 and u2 given by (9)–(10). Moreover, | x0(t) | ≤ ε, ∀ t ≥ 0.
Proof.: Clearly, under the bounded feedback (9)–(10) and form Theorem 2, the system (6) is 4-partially stable in finite time. Therefore, there exists a finite time T0 such that x1(t) = x2(t) = x3(t) = x4(t) = 0 for all t ≥ T0.
By integration, the state x0 verifies

by using the triangular inequality, we have

Since M0 is large enough given in Theorem 2, then

Hence, state x0 is constant and large enough for t, then the limit of x0 is denoted by
In this section, the continuous, bounded, pure state feedback controller proposed in Theorem 2 is used to show how to stabilize the nonholonomic chained form system (6) in a finite time. We will demonstrate the effectiveness of our methods by a numerical example.
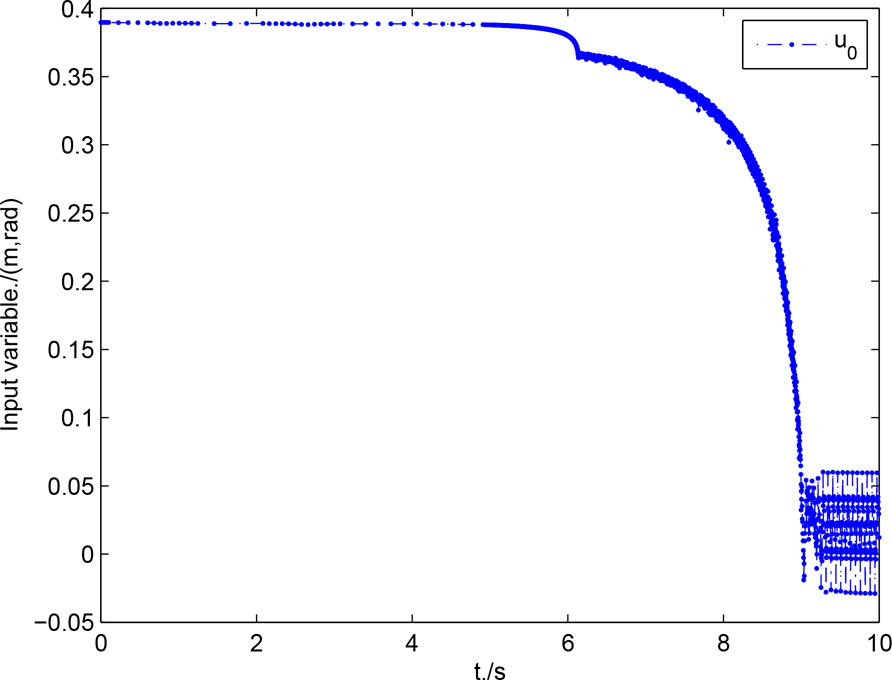
For system (6) under the saturated constraints (7), we suppose that u0max = 3.0, u1max = 3.5, u2max=3.0. The initial conditions are x0(0)=0.3, x1(0) = −1.5, x2(0) = −0.6, x3(0) = 1.2, x4(0) = −2.0. Given ε = 15, from Theorem 2, the control parameters are chosen as M0=10, M11 = M12 = M21=M22=1.0, ri = 1.0,(i = 1,2,3,4), kj = 2.0,(j = 1,2,3). The saturation function is selected as
Figs. 3–4 show that under the controllers (9)–(10) proposed in Theorem 2, the state variable (x1,x2) and (x3,x4) are stabilized to zero in a finite time T ≤ 10s, that is, as t ≥ 10s, x i = 0(i = 1,2,3,4), and remain unchanged. From Fig. 2, we can observe that x0 converges to a constant c(x(0)) satisfying 5<c(x(0)) < 6 < ε = 15, as expressed by Theorem 3.
Figs. 5–7 show that at any time, the bounds of all the control inputs U0,u1 and u2 are not less than the saturation level given in advance. Particularly, since the first input u0 depends on the state (x1,x2,x3,x4), and from Fig. 5, we can observe that (x1,x2,x3,x4) = 0 as t ≥ 9s, thus u0 = 0, as ≥ 9s.

State variable x0 of the transformed chained system (6)

State variable (x1, x2) of the transformed chained system (6)

State variable (x3, x4) of the transformed chained system (6)
Response of bounded input u0 with respect to time
Compared with the existing control methods for Type (1,2) nonholonomic mobile robots, the best advantage of our controller design is that control inputs are subject to the saturation constraints. Next, we also presents some simulation results with the same design parameters and initial conditions as in this paper by the control strategy of the reference [48].

Response of bounded input u1 with respect to time

Response of bounded input u2 with respect to time
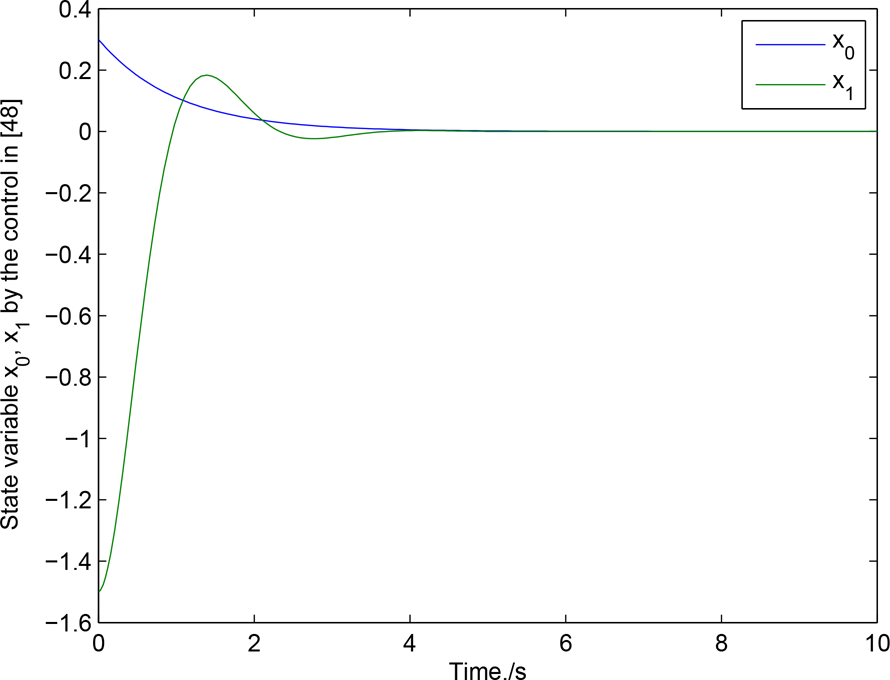
Response of state variable x0, x1 with respect to time when using controller of [48]
Figs. 8–9 show the convergence of the state variable (x0, …, x4) when using the controller of [48], while from Fig. 10, we observe that the bounded constraints | u0 | ≤ 3.0, | u1 | ≤ 3.5, | u2 | ≤ 3.0 were broken, it may exceed the limitation of actuators at some time, in more detail,

Response of state variable x2, x3, x4 with respect to time when using controller of [48]
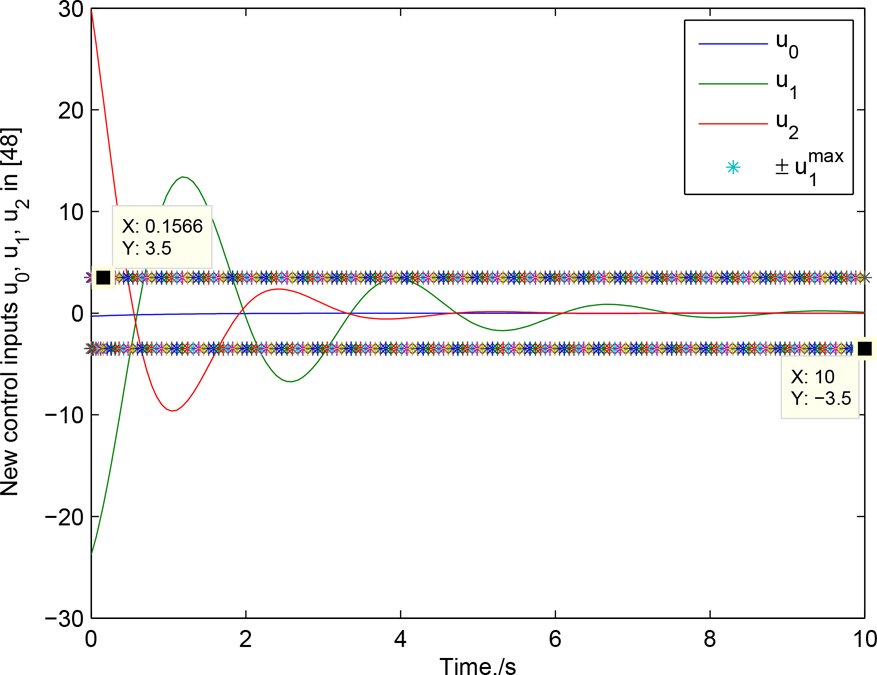
Response of input variable u0, u1, u2 with respect to time when using controller of [48]
we can see that | u1 |, | u2 | exceed the maximum limitation of uimax,i = 0,1,2 frequently at about t < 3.8s in Fig. 10, which means that the practical constraints | ui | ≤uimax can not always be guaranteed at any time by the design method in [48].
In this paper, the saturated, continuous, pure state feedback controller is designed for a class of nonholonomic mobile robots for the first time, such that its’ chained form systems can be stabilized to zero in a finite time except the angle state variable. Moreover, the angle state can be driven to a constant, and the convergence limit constant may be accurately estimated in advance.
Footnotes
6.
This paper was supported by the National Science Foundation of China (61304004), the China Postdoctoral Science Foundation funded project (2013M531263), the Jiangsu Planned Projects for Postdoctoral Research Funds (1302140C), the Foundation of China Scholarship Council (201406715056), the Project Supported by the Foundation (No.CZSR2014005) of Changzhou Key Laboratory of Special Robot and Intelligent Technology, P.R. China, and the Fundamental Research Funds for the Central Universities (2014B11414).