
Abstract
In this paper, we propose a self-balancing personal mobility vehicle with a hybrid driving mechanism, called as Wi-PMP, and discuss its features from the perspectives of its power-assist driving performance and a rider's evaluation. The mobility vehicle consists of a wheeled inverted pendulum type mobile platform, and a hybrid driving mechanism that can use human and motor power together for driving. By performing a bump driving, a slope driving, and a outdoor driving experiment, we confirm that the proposed hybrid mechanism is valid for the integration of human and motor power, and is effective to increase the driving power and reduce electrical load on motors and batteries. We conducted several experiments to investigate the rider's evaluation on a sit-riding method compared to a stand-riding one. The questionnaire results showed that a rider felt more comfortable in the case of the sit-riding method when getting on and off, and when driving the mobility vehicle. This implies that riding-type self-balancing vehicles such as Wi-PMP have the potential to become familiar personal mobility vehicles in daily life.
Introduction
Background
With the increased focus on the ongoing energy crisis and environmental pollution, personal mobility vehicles are considered as potential alternatives for personal transportation over short distances [1, 2, 3, 4, 5]. Among them, the self-balancing personal mobility vehicle (PMV), which uses an inverted pendulum technique has attracted significant attention because of its merits, which include intuitive operation by human motion, compact platform, and ease of use [6,7,8]. In particular, the Segway (SEGWAY Inc.) has been widely introduced in the USA and EU, and is used in various fields such as tours, security, golf, and as a private hobby. One reports states that, it can also be used as a mobility aid for person with functional disabilities [9].
On the other hand, the Segway faced several problems preventing its widespread utilization as a PMV in daily human life. The need to ensure the safety of both riders and pedestrians is an important issue, and several serious Segway rider injuries have been reported [10]. We should also consider its influence on riders and pedestrians in terms of mental and physical loads. According to the report [8], persons tend to feel anxious when they operating stand-riding-type self-balancing PMVs such as the Segway, and a personal space was investigated in which pedestrians are not fearful about its existence [11]. Hashimoto et al. evaluated the rider's physical load and reported that a rider operating a PMV felt physical fatigue on their legs during long-distance driving [12].
Driving performance that considers the driving cost is also an important factor for its popularization. According to a report by a non-governmental investigation organization in Japan, the average driving distance of the representative self-balancing PMV for each hour of battery charge is just 5 [km], which is significantly less than that of an electric or a power-assist bicycle. Moreover, the driving cost per 1 [km] is eight times greater than that of the other personal mobility measures. The driving cost is expected to decrease accordingly with an increase in the market penetration, and the driving distance is expected to increase with an improvement in the battery performance. Nevertheless, the problem of high energy consumption due to continuous balancing control and two-wheel drive operation still persists. Furthermore, the problems of power limitation due to the dependency on electric energy will still remain. These problems become more serious when self-balancing PMVs are driven for long distances where many uphill slopes and bumps exist, which inevitably requires powerful electric motors.
To solve this problem, a self-balancing PMV with a pedal mechanism was experimentally proposed to use human power during driving [13]. It had a drive mechanism by which a pedal and a wheel shaft were directly connected by a chain, and that could be driven by human pedaling while maintaining one's balance during forward driving. By introducing such a hybrid driving feature, the PMV is expected to reduce the battery consumption and increase driving power. In addition, a rider's mental and physical load may be reduced compared to a sit-riding-type self-balancing PMV, since they sit on a saddle when operating it. However, these advantages were not been confirmed in detail in the study, which are important points for such PMVs that would enable its widespread introduction into daily human life.
Research goal
We proposed a self-balancing PMV, wheeled inverted pendulum-type personal mobility (Wi-PMP), which has a hybrid driving mechanism capable of using both human and electric power [14]. A rider can drive Wi-PMP by pedaling like a bicycle, by inclining one's body forward as in the case of the Segway, and by incorporating both motions. A differential gear-train equipment installed on the vehicle allows the rider to accomplish a pivot turn remaining balances. In the our previous research [14], the simple functional confirmation has been only carried out on the hybrid mechanism, but the effectiveness of the power-assist function has not been verified as well as a user evaluation on its unique sit-riding-type.
In this paper, we will discuss the features of Wi-PMP from two perspective; one is the power-assist driving performance and the other is the user evaluation. For the former, the effectiveness of the hybrid driving function in reducing battery consumption and increasing driving power are confirmed through driving experiments on a slope, on a bump, and in an outdoor environment. For the latter, a user evaluation from the viewpoints of anxiety and operability is investigated for Wi-PMP. A user evaluation on a stand-riding-type self-balancing PMV was reported in the reference [8]. In this paper, a user evaluation is conducted to compare a sit-riding-type and a stading-riding-type self-balancing PMV on the above viewpoints, and the result will be derived by adopting a reliability analysis and hypothesis testing. From the two results, we show that Wi-PMP is a power-efficient and user friendly personal mobility vehicle.
The remaining sections are composed as follows. First, the mechanical and electric design of Wi-PMP is briefly described in Sec. 2, and its self-balancing driving control implementing a pedal torque is shown in Sec. 3. In Sec. 4, the validity of the hybrid driving mechanism is confirmed through slope and step driving experiments, and finally, user evaluation on the comfortability and operability compared to a stand-riding-type is described in Sec. 5.
Prototype of Wi-PMP
Overall design
Wi-PMP is a compact self-balancing PMV with a power-efficient driving performance and good usability that does not cause feeling of anxiety during a drive. To achieve this concept, a hybrid driving function using both human and electric power, and a body designed like that of a conventional bicycle shape are incorporated into its design.
The appearance of the Wi-PMP prototype and its overall specification are shown in Fig. 1 and Table 1, respectively. The prototype has a parallel two-wheeled inverted pendulum mechanism for self-balancing driving and pivot turning, and the hybrid driving mechanism with a pedal and motor driving mechanism. Two electric actuators with a DC motor (150 [W]) and gear-train are fixed to the body, and their rotational shafts are directly connected to each wheel shaft so that the body can freely rotate about the wheel shafts. A turning lever, a start switch, and an emergency switch are mounted on the handle, and a Li-ion battery and a control box are installed at the back of the saddle. The total weight is about 17 [kg], which is lighter than that of an electric power-assist bicycle. The shape of Wi-PMP was designed to ensure the rider's comfortability while driving it [14]. The relative position among the handle, the saddle, and the pedals was decided so that the position of the rider's center of gravity was located on the upper wheel shafts to avoid excessive initial inclination angle of the body. In addition, to prevent driver anxiety, the distance between two wheels was decided about 420 [mm], so that the rider's feet could be grounded while sitting on the saddle when mounting and dismounting the vehicle.

Appearance of Wi-PMP
Overall specification of Wi-PMP

The appearance of the driving part of Wi-PMP, and its power transmission mechanism are illustrated in Fig. 2. The driving part consists of a pedal, a chain driving mechanism, a one-way clutch, differential equipment, transmission gears, and motors. The driving torque generated by the leg rowing motion is transmitted from the pedal to a sprocket fixed on the differential equipment through the chain. Because the one-way clutch is installed between the sprocket and the shaft of the differential equipment, the distributed torque for forward driving from the differential equipment is only transmitted to the hub, which is fixed at each wheel via the transmission gear. On the other hand, the motor's shaft is connected to the hub by the coupling, and its torque is directly transmitted to the wheel shaft, but not to the pedal due to the one-way clutch. This makes it possible for the pedal to be unaffected by the motor's torque, even if the rotational speed of a motor is faster than that of a pedal while forward moving, which is the same as a bicycle. In addition, the rider can achieve steering and pivot turning, while keeping both feet on the pedals due to the speed difference between both motors and the differential motion of the differential equipment. The reduction ratio between the sprocket of the pedal side and the gear of a wheel shaft is 2.3:1 and the length of the pedal is 88 [mm].
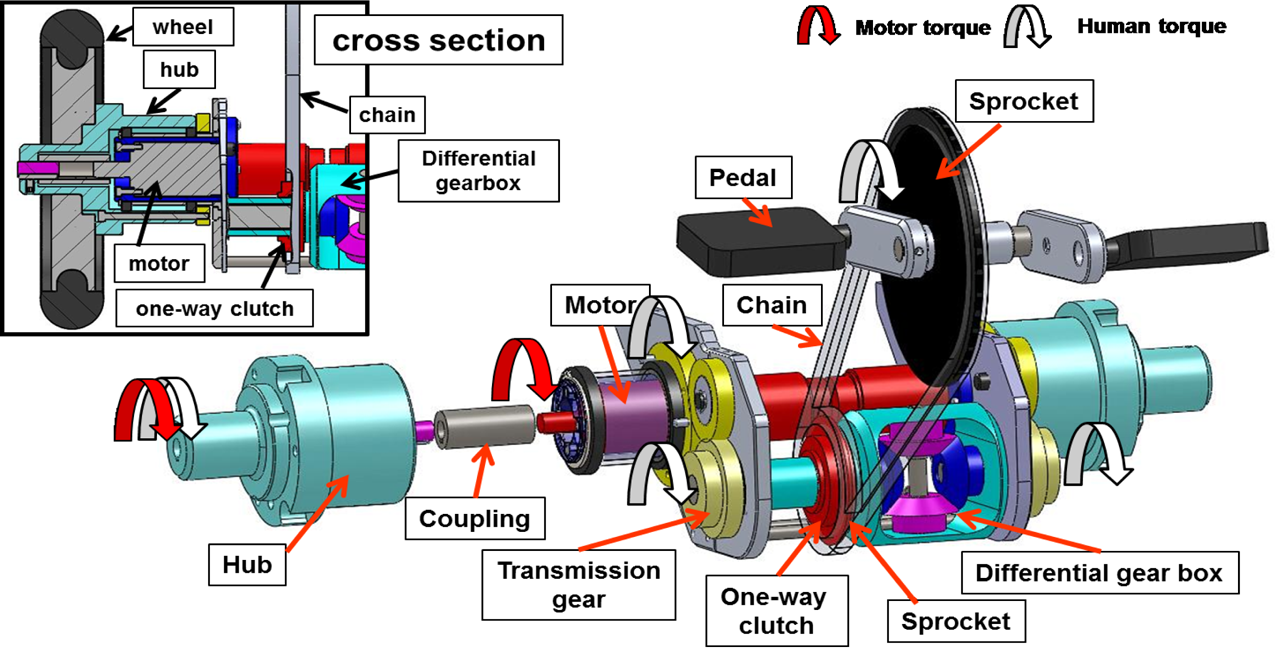
Driving part of Wi-PMP and a hybrid driving mechanism
The configuration of the control system is shown in Fig. 3. It consists of a power part, a control part, and an actuator part. The power board supplies electric power from a battery to the control and actuator parts. The start and stop of the power supply are controlled by relays that are installed on the boards, based on signals from each operating switch. In the control part, the body's inclination angle is estimated from the output of a gyro and acceleration sensor, where a drift error is reduced through the Kalman filter. The target steering angle is measured by the potentiometer installed in the roll joint of the handle, and the real steering angle is calculated using the rotational angle of the wheels measured by rotary encoders connected to each motor shaft. The MPU(SH2–7125) in the control part produces a control input for a self-balancing and steering motion based on the information from each sensor. The actuator part actually controls motors by motor drivers using the control input from the control part. Motor overloads and abnormal body inclination angles are continuously monitored, and the presence of an abnormal state is communicated via a buzzer. In an emergency situation, the electric power delivered to the motor drivers can be cut-off via a relay circuit using the stop signal of the emergency switch.
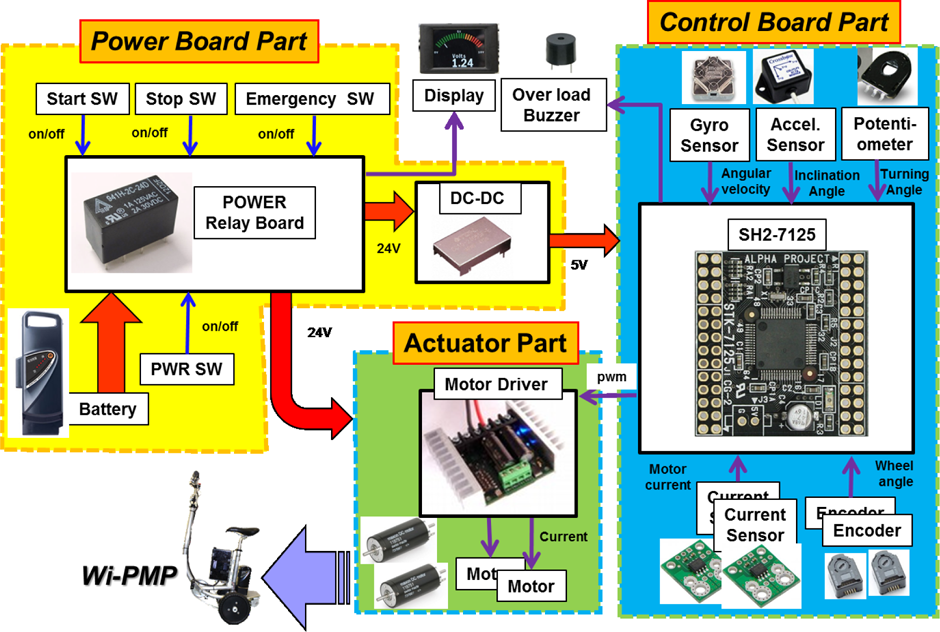
Control system configuration
Driving control law
Wi-PMP can be considered as a planar wheeled inverted pendulum model with a pedal mechanism, as shown in Fig. 4(a). Then, the linearized motion equations of the model are expressed as follows:


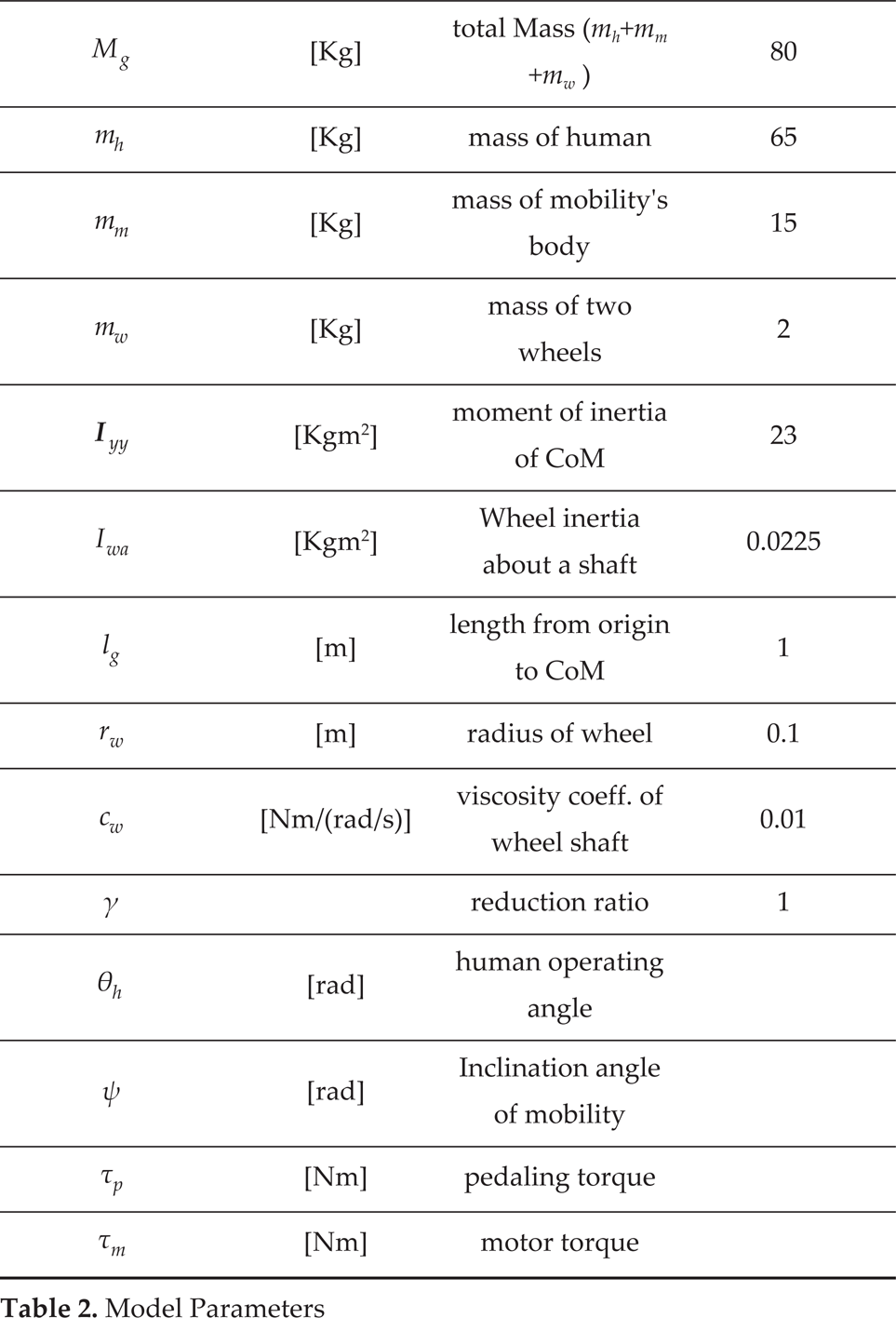
where ψ is the inclination angle of the mobility, θw is the representative wheel's rotational angle, and τp and τm are the pedal and representative motor torque, respectively. The parameters are described in Table 2.
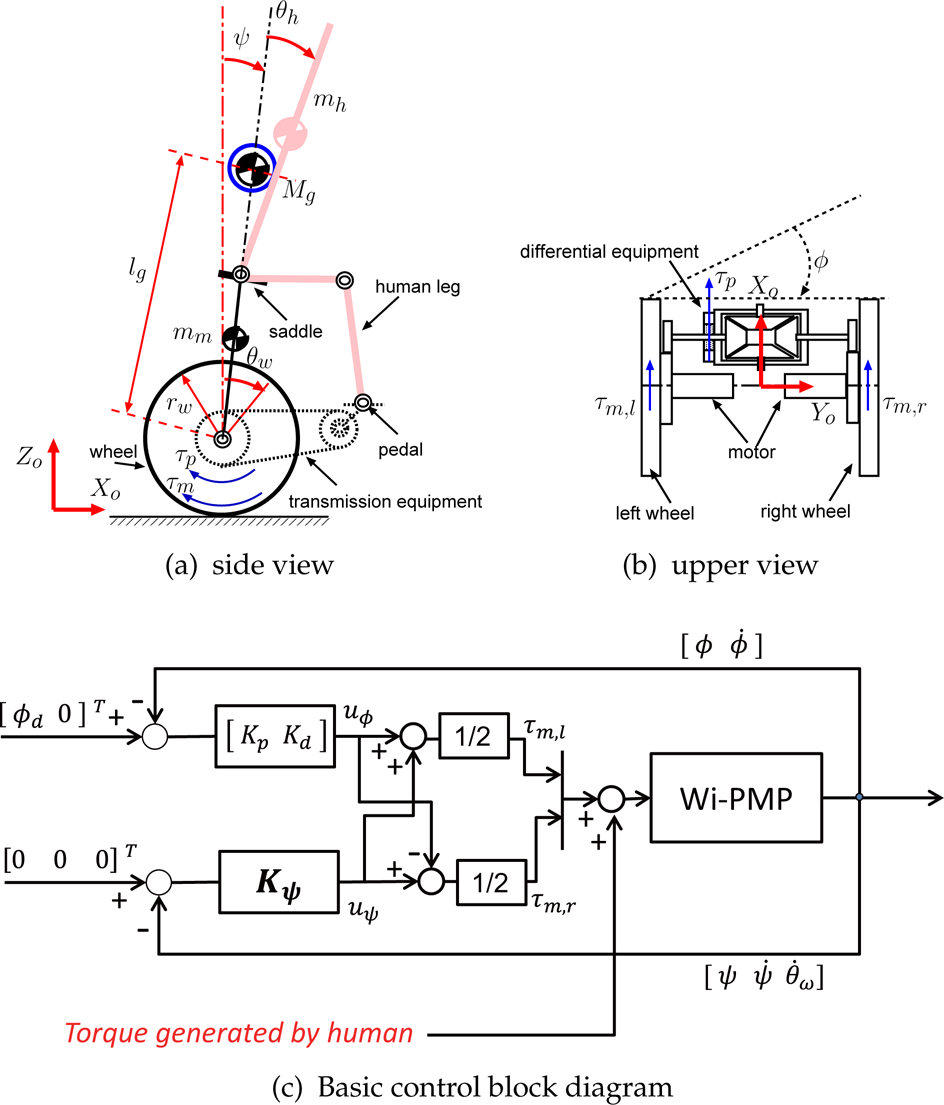
The model of Wi-PMP as (a) a planar wheeled inverted pendulum robot, (b) two-wheeled mobility, and (c) its basic driving control block diagram
Model Parameters
Letting

where







The pedaling torque, τp, is considered as a disturbance in the equation. Here, a state feedback control law is introduced for the self-balancing control as
where

The characteristic equation associated with Eq. (5) is given by

If all the roots of the characteristic equation lie in the left half-plane, then the closed-loop system is stable. We can always determine Kψ to place all the system closed-loop poles in the left-plane. To determine the optimal feedback gain Kψ, we introduce LQR(Linear Quadratic Regulator) whose evaluation function is given

Deciding the optimal gain Kψ by MATLAB using the parameter values in Table 2,

where
For a steering motion, a PD controller is adopted based on the two-wheeled model shown in Fig. 4(b), which is given as follows:

where ψd and ψ are the desired and present steering angle, respectively, and Kp [Nm/rad] and Kd [Nm/rad/s] are the proportional and differential gains, respectively. In the real system, ψd is a time varying parameter changed by the human steering motion to rotate the handle, and

The control block diagram is shown in Fig. 4(c). Note that, in the real mobility system, τp does not contribute as the driving torque if the rotating velocity of the wheel shafts is faster than that of the pedal because of the one-way clutch. Also, τm is not transmitted to the pedal if the left wheel and right wheel inversely rotate with each other with the same speed because of the differential gear equipment.
The above controller can absorb some amount of parametric errors including human mass and pedaling torque. However, it does not consider the parametric uncertainty caused by differnt users, which is strongly required for the practical application. In this paper, the robustness of the driving controller is not treated in order to focus on the validity of the power-assist function and the user evaluation of the proposed PMV.
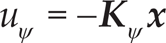
Driving simulations are conducted to confirm the influence of τp to the self-balancing driving control. Parameters described in Table 2 and τp = 10
Figure 5 shows the time profiles of

Influence of pedal torque (failure of forward driving)
From the above simulation results, for a self-balancing mobility vehicle with a pedal mechanism, we can confirm that a power-assist drive using both human pedaling and motor torque can be realized by humans' appropriate body motion.
Influence of pedal torque (succeed to forward drive)
Forward driving and pivot turning
Simple driving experiments were conducted to confirm the self-balancing drive function with the hybrid driving mechanism [14].
For a forward driving, the rider determined Wi-PMP by mainly using a pedal while just adjusting his/her body so that the mobility vehicle did not inversely rotate due to the reaction torque. A motor driving scenario, in which the rider drives only by inclining his/her body without pedaling was conducted for comparison purposes. The experimental results of the vehicle's velocity and inclination angle are shown in Fig. 7(a). From the figure, it can be seen that the vehicle is able to drive at almost the same speed in both driving scenarios although its inclination angle was very small for the pedal driving. This result shows that the hybrid driving mechanism is valid, and Wi-PMP can also be successfully driven by human power in a self-balancing drive. For the pivot turning experiment, the rider operated the handle to rotate the vehicle at a spot while mounting his/her feet on pedals. The turning, forward velocity, and inclination angle of the vehicle (including some photographs) are shown in Fig. 7(b). From the figure, only the turning angle was changed, whereas the forward velocity and inclination angle remained unchanged, which indicates that the differential mechanism implemented to the Wi-PMP is effective for a turning motion.

Experimental results of motor driving and pedal driving
The effectiveness of the power-assist driving function using the Wi-PMP's hybrid driving equipment was confirmed through experiments of a bump driving, a slope driving, and an outdoor driving, which are considered as cases for which a large load is expected for motors and batteries.
Bump driving
For the bump driving experiment, the rider drove the vehicle using two driving methods, with the motor only and using power-assist driving, and tried to climbed over a bump. In the power-assist driving scenario, the rider inclines his/her body to generate the motor torque while pedaling at the same time. While approaching the bump, the vehicle was suppressed at a low speed to minimize the inertia influence of the rider and vehicle. The bump has a height of 4 [cm], which is equal to one-third of the wheel radius, which the vehicle cannot climb over using only the motor power with a maximum motor current 30 [A], which was limited to prevent motor damage. The experimental condition and driving scenes for the bump driving case are shown in Fig 8(a), and the time profiles of the driving velocity, inclination angle of the vehicle's body, and motor current for both two driving methods are shown in Fig. 8(b) and Fig. 8(c), respectively. For the motor driving case, Fig. 8(b), the step climbing motion started at 5.2 [s], and the motor current increased according to the increment of the inclination angle of the vehicle's body, which was caused by the rider's motion to climb over the bump. However, the vehicle failed to climb over it due to insufficient motor torque even though the motor current reached to 30 [A]. On the other hand, for the assist driving, scenario shown in Fig. 8(c), the motor current began to increase at 5.5 [s] as the wheels made contact with the bump and reached a peak current value of 22 [A] at 5.9 [s]. After reaching the peak current value, it was seen that the inclination angle of the vehicle's body decreased and the vehicle's speed was recovered. This shows that, both the motors and human power were used as the driving torque for Wi-PMP. The result was that the vehicle successfully climbed over the bump.

Bump climbing experiment of Wi-PMP
Slope driving
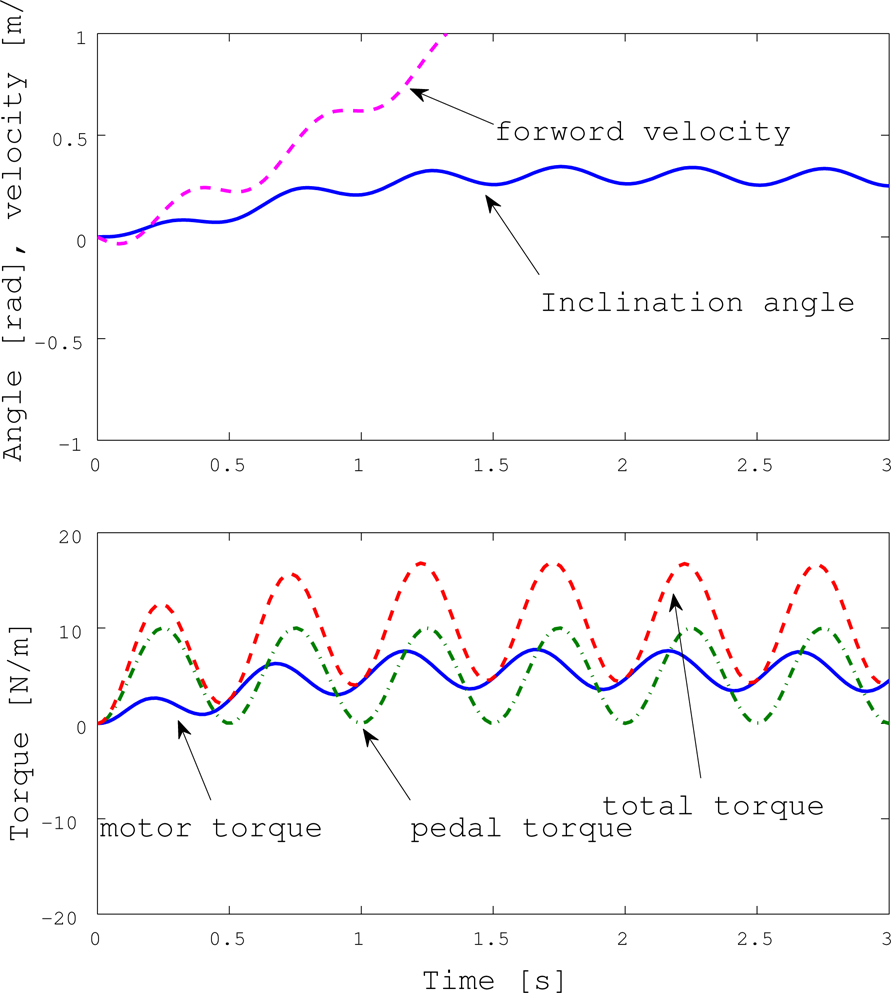
For the slope driving experiment, a rider drove the vehicle on a slope with a 10 [deg] inclination angle and climbed using the above two driving methods. As much as possible, the rider tried to drive at the same speed for both experiments. Experimental driving scenes are shown in Fig. 9(a), and it can be seen that the slope driving was completed for both driving methods. However, in Fig. 9(b), we observe that the vehicle's speed was almost the same for both driving scenarios even though the inclination angle of the vehicle's body in the power-assist driving case was smaller than that in the motor driving case. This means that less motor power was required for the power-assist driving to realize the same driving speed on the slope than for the motor driving. Actually, as shown in Fig. 9(c), the motor current in the power-assist driving was 6 [A] smaller than that in the motor driving, which indicates a 40 [%] current reduction compared with that of the motor driving.
Slope traveling experiment of Wi-PMP
Driving in outdoor environment
An outdoor driving experiment for relatively long distance has been conducted to investigate battery consumption rate for the two driving methods, which includes a very simple durability and robustness test. A rider repeatedly drove the vehicle with a same speed as can as possible between two points on a bumpy asphalt road for 1 [km] as shown in Fig. 10(a) with the two driving methods. Time profiles of a driving current and a battery voltage during 500 [s] are shown in Fig. 10(b). From the result, it can be found that the battery voltage decreased rapidly in the motor driving than in the power-assist driving. The reason of this is that the acceleration of the vehicle was achieved by only motors for the motor driving, while by human pedaling torque for the assist driving as it can see from the current time profiles.

Driving experiment in an outdoor environment for 1 [km]. A rider drove the vehicle with a same speed as can as possible.
From the above driving experimental results, for bump, slope, and an outdoor, we can deduce, that the hybrid mechanism of Wi-PMP is valid for the cooperation of human and motor power, and that power-assist driving is effective for the reduction of the load to electric motors and batteries.
The validity of the power-assist function was confirmed in case of changing the angle of slope and the height of the step. Especially, the stability of the PMV was also confirmed in the driving experiments by several riders whith different body weight each other, which was result from adopting the optimal control gain taht absorbs a certain amount of parameter errors.
As mentioned before, the rider sits on a saddle and drives Wi-PMP, and can ground both legs when getting on and off, as with a bicycle. Therefore, there is a difference in how one gets on/off when driving with Wi-PMP and in the case of stand-riding-type PMVs. For Wi-PMP, the rider sits on a saddle while grounding both feet, and then puts them on the pedals when getting on. Then, when getting off, they first ground both feet and stand up. On the other hand, for stand-riding-type PMVs, the rider first places one leg on a boarding plate, and then puts the other leg on it when getting on; inversely, he/she grounds one leg first and then the other leg when getting off. In addition, to accelerate (decelerate) the Wi-PMP rider moves the upper body only, which is different from the stand-riding PMVs, where they move the entire body, including the lower body. All of these features may give the Wi-PMP rider a different feeling compared to when they ride stand-riding-type self-balancing PMVs. In this section, we analyze the rider's evaluation about Wi-PMP from the viewpoints of anxiety and operability when they use it.
Experimental condition
In the experiment, the user rides the Wi-PMP and drives it on a flat indoor space using two riding approaches, striding and stand-riding as shown in Fig. 11. For the striding, the user sits on a saddle and drives the Wi-PMP with the motor and without pedaling, while for the stand-riding, it is driven as a conventional standing-riding-type PMVs. The driving experimental procedures are described as below.
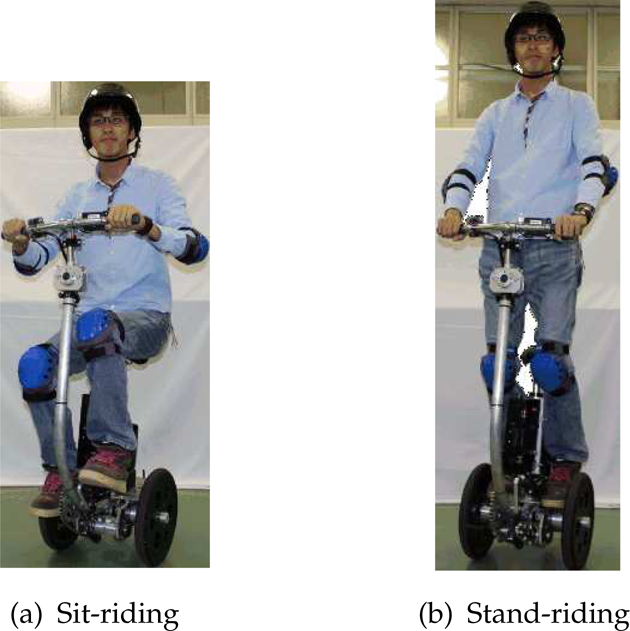
Sit-riding and stand-riding for Wi-PMP
Stand across both legs without sitting on the saddle. Push start switch on to start self-balancing mode. Sit on the saddle and puts both feet on the boarding plate. Drive Wi-PMP straightly for 5 [m] distance. Stop the vehicle and ground both feet before standing up.
Stand backward on the Wi-PMP while holding the handle. Push start switch on to start self-balancing mode. Put each leg on the boarding plate one at a time. Drive the Wi-PMP straightly for 5 [m] distance. Stop and ground each leg, one at a time.
The user drives the Wi-PMP three times for each riding method following the above riding procedure. On two occasions, this was done with assistance, and once without assistance. To reduce the user's emotional bias, we explained the experimental method so that the users do not feel overly fearful, and do not provide any information regarding the merits of either riding method. In addition, we changed the riding method's order for each user to avoid variations in the evaluation due to the riding order.
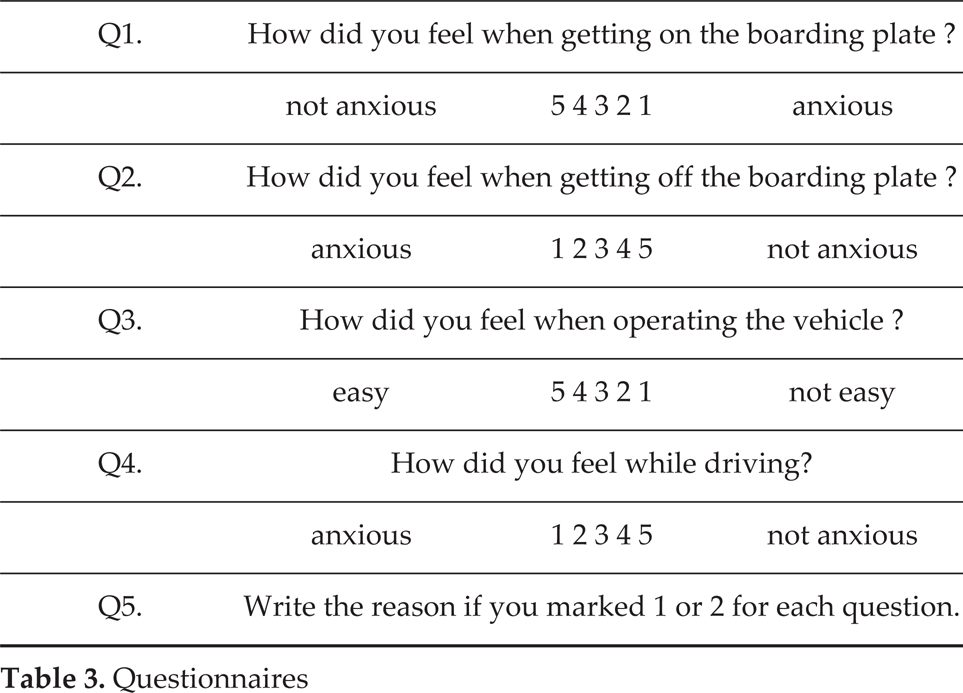
After conducting the driving experiment, users were asked to complete the questionnaire sheets, which included basic personal information such as sex, age, body weight and height, any previous riding experience using self-balancing PMVs, and the evaluation questions about the two riding types. In three questions, we evaluated feelings of anxiety, and in one question, we evaluated the operability for each riding type based on a measurement using five ranks, which are shown in Table 3. The evaluated results were analyzed based on the mean value and standard deviation, and they were then verified using the t-test. Totally, 32 healthy users (male: 21 and female: 11) whose ages ranged from the 20s to 60s took part in the experiment. Snap shots of the experimental scene are shown in Fig. 12.
Questionnaires

Snap shots of experimental scene
The evaluation results of the questionnaire are shown in Fig. 13 and Table 4. Regarding Q1,” How did you feel when getting on the boarding plate?”, users reported feeling less anxiety for the sit-riding-type (Ave.:4.19, SD:0.93) than for the stand-riding-type (Ave.:3.31, SD:1.28). The t-test result shows that the statistical difference between the two riding types exists at 1 [%] level; p = 0.0002. The same evaluation result was obtained with respect to Q2, “How did you feel when getting off the boarding plate”. The users reported feeling less anxious for the sitting-riding-type (Ave.:4.19, SD:1.15) than for the standing-riding-type (Ave.:3.53, SD: 1.29) when they got off from the boarding plate. The t-test result shows that the statistical difference between the two riding types exist at 5 [%] level; p=0.01. With respect to Q4, “How did you feel during the drive?”, the users reported feeling less anxious for the sitting drive (Ave.:3.84, SD:1.05) than for the standing drive (Ave.:3.31, SD:1.33), and the t-test result shows that the statistical difference between the two riding type exists at 1 [%] level; p = 0.005. We can deduce the main reasons for which the sit-riding was associated with fewer feeling of anxiety from the answer to Q5:1. it feels the same as a conventional bicycle, 2. Both legs can be grounded(in the case of stand-riding, there is a moment in which only one leg is on the boarding plate when getting on and off).

Questionnaire result: the evaluation of anxiety when getting on(a), getting off(b), driving(d) and of operability(c)
Result of questionnaire
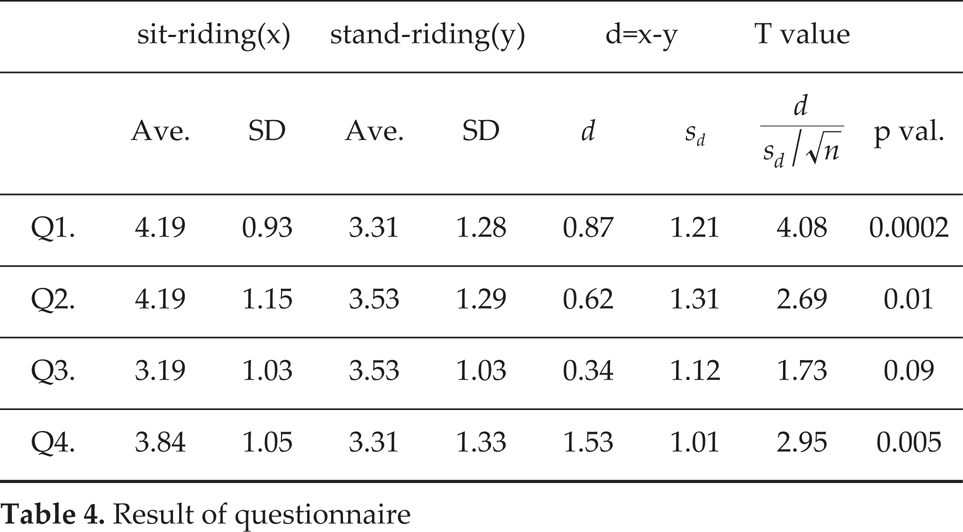
Regarding to Q3, “How did you feel when operating the vehicle?”, the stand-riding type (Ave.:3.53, SD:1.29) had a higher average value than that of the sit-riding-type (Ave.: 3.19, SD:1.03), which means that users felt that the standing drive was easier to operate than the other one. However, from the t-test result, there is no difference between them at the statistical level of 5 [%]. It is thought that this result is due to the influence of the user's feeling (anxious or not anxious) on the ease of the operation. Actually, users who marked low score for Q3. reported that they felt fear when driving Wi-PMP while standing, and it was therefore, more difficult to operate it. On the other hand, users who marked high score on Q3. reported that in the case of the stand-riding, the entire body can be used to operate it, so that acceleration(deceleration) was easy.
From all of the above evaluation results, we can deduce that for the sit-riding type (the main riding method of Wi-PMP), it is easier for riders to get on and off, and to drive the self-balancing type PMVs. This indicates the potential of adopting the Wi-PMP as a familiar personal mobility vehicle in a daily life. Note that this result may not have high reliability due to the small number of subjects.
In this paper, we proposed a self-balancing personal mobility vehicle with a hybrid driving mechanism, Wi-PMP, and discussed its features based on the power-assist driving performance and the user evaluation. By performing the bump, the slope, and the outdoor driving experiments, we confirmed that the proposed hybrid mechanism was valid for the integration of human and motor power, and effectively increased the driving power and reduced the electrical load on motors and batteries. We conducted several experiments to investigate riders' evaluations on the sit-riding method compared with those of the stand-riding method. The questionnaire results showed that riders reported greater ease when getting on/off and when driving in the case of the sit-riding method. This implies that the Wi-PMP sit-riding-type self-balancing PMV could be considered as familiar personal mobility vehicles in a daily life. As future works, we are going to develop a robust power assist driving controller that can improve the efficiency of driving power, user's maneuverability, and the robustness against parametric uncertainty.