
Abstract
In this paper a conceptual kinematic design of a chameleon-like robot with proper mobility capacity is presented for service applications in space stations as result of design considerations with biomimetic inspiration by looking at chameleons. Requirements and characteristics are discussed with the aim to identify design problems and operation features. A study of feasibility is described through performance evaluation by using simulations for a basic operation characterization.
1. Introduction
Since a decade service robots have addressed great attention for developing new robotic systems for new applications even in non technical areas. Typical robots are already developed for medical care, space exploration, demining operation, surveillance, entertainment, museum guide and many other non industrial applications, as reported for example in [1]. In some cases results are even already available in the market. A considerable literature is available not only on technical issues but it is not reported in the paper for space limits and paper purposes.
According to the International Federation of Robotics (IFR), “a service robot is a robot, which operates semi or fully autonomously to perform services useful to the well being of human and equipment, excluding manufacturing operations”. Therefore, a service action can be understood as a complex set of operations that can achieve goals with a variety of aspects, in manipulation and transportation but also in dealing with interactions with environment and human beings as users or operators or assisted persons.
Specific activity has been developed in the past for designing robots for space applications, [2], but only few robotic arms have been developed for servicing space stations, like Canadarm, Robonaut, Justin, and ESA EuroBot.
Canadarm was designed by Canadian Space Agency for payload handling, support in extravehicular activity, and station assembly, [3]. A second version Canadarm2 is also used for service and maintenance of space stations, transport of payloads, as well as for the berthing/de-berthing of the orbit, [4]. Canadarm2 can move because of a mobile platform, which is guided along a giant truss beam.
Robonaut is a humanoid robot designed by the Robotic Systems Technology Branch at NASA's Johnson Space Center in a collaborative effort with DARPA, [5]. Robonaut can work for extravehicular activity and planetary exploration with rapid response, [6]. Robonaut has a single seven-DOFs leg with an interface that permit its attachment to the spacecraft. Once anchored to a spacecraft, the multi-jointed leg provides a mobility larger than the one of a human crew member. Additionally, Robonaut B is designed to have a grapple fixture in its back that allows its installation in the large Space Shuttle and Space Station arms, [7].
Justin is a two-arm humanoid system that has been developed as a research platform for studying dexterous two-hand manipulation by German aerospace agency but also for its use in space stations. The system is based on the modular DTR-Lightweight-Robot-III and DTR-Hand-II, [8].
ESA EuroBot robot is designed for ESA by a consortium led by Thales Alenia Space with a central body structure with three identical arms, each one with 7 joints, [9]. Each arm is equipped with a camera and an end-effector hand, which is capable of grasping EVA handrails. In next developments Eurobot will have a set of 3 or 4 interchangeable hands.
However there is still a large attention in the design of service robots for space applications that are aimed at service tasks for maintenance and surveillance in space orbital stations with proper mobility capacity. Challenges can be mainly focused in design issues for limiting complexity and size as well as for optimizing capabilities and autonomy.
In this paper we have attached the problem of designing a new robot structure for outdoor space applications for servicing tasks with a proper mobility in orbital stations. The mobility capacity can be considered a fundamental aspect in this kind of service tasks since any operation depends on the possibility to reach the intervention area with proper mobility. Thus, the aim of this work has been focused to design a walking robot with high reliability and robust operation for applications in external environment of space stations both for construction and maintenance. The main characteristcs can be considered the possibility to move along rods of deployable structures and the need to have a structure with less actuators as possible. Bio-inspiration from chameleons has helped to find a solution for a system with the main capability in moving along rods with robust powerful posture that can permit high payload and high impulse absorption (due to impacts with flying objects at high velocity). The primary interest has been focused on the structure design that can ensure versatility and robustness with a compact mechanical design. The paper presents a conceptual kinematic design that has been inspired by biomimetics considerations by looking at chameleons in their motion and structure. The proposed solution has been obtained from considerations of requirements as well as it has been characterized by simulation results for basic operation features. A preliminary version of this paper has been presented at RAAD 2012 Workshop, [10].
Recently, service robots in other service applications are developed with the aim to perform operations in specific no-industrial tasks, whose main characteristics are related with interactions with the environment, including often human beings, as pointed out in [11]. Thus, those robots do a service that can be understood as as a complete task with their actions, which are often much more extended and complicated than in industrial applications. In addition, even the specificity of service goals require different solutions both for design and operation, and a large variety of robots and robotic systems have been and can be still developed. In fact, a considerable literature is available with proposals of a large variety of service robots, by emphasizing on design issues as well as on operation success with procedures and algorithms that can be used specifically but in general for a variety of cases as reported for example in [1]. Indeed, a general design approach for service robots can be outlined only with general guidelines, [11], and there are still several challenges that must be not only attached but even defined, as for example it has pointed out in the Strategic Agenda in [12].
Referring to technical aspects, Fig.1 summarizes the mechatronic character of a service robot, as a traditional robot, but with specific emphasis to those above-mentioned peculiarities in terms of interactions with environment and human beings, and in term of a careful consideration of the task environment. Those interactions should be understood not only in terms of engineering mechanical issues but by looking at more general aspects, like for example psychological attitudes and social impacts in potential users. A consideration of the environment should include also how a service robot affects or it is affected by it, by analyzing and designing the variety of feasible conditions and situations.
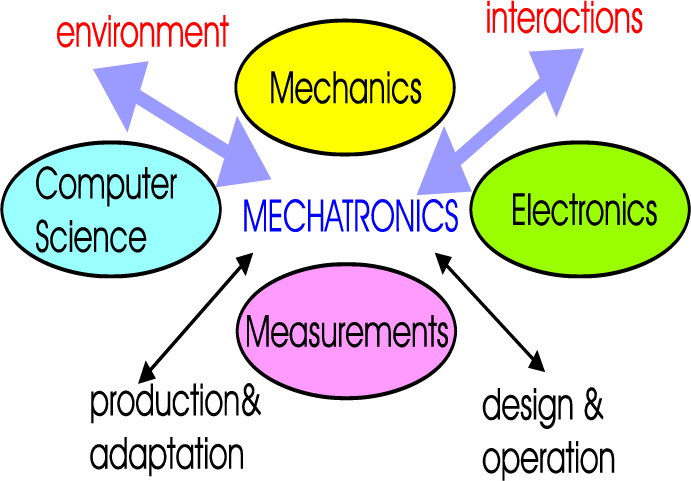
A general scheme for mechatronic design of service robots, [11]
In addition, service robots, even for space applications, can be considered efficient and successful when ultimately the cost, both in design and operation, can be properly sized as function of the service task and mainly as function of the affordable budget of users and operators, and within planned project programs. Thus, indeed, economic evaluation and management must be included both in R&D and design of service robots, even since the beginning.
Once a service robot problem is properly identified by using the above considerations with specific further observations, challenges can be understood for given applications and service tasks, as related to the specific workspace environment.
In particular, challenges for service robots can be understood in general as in:
operating together and/or for human users, with suitable behaviors and careful users-friendly operation;
operating service tasks with proper easy-operation modes at user-oriented cost.
In case of space applications those challenges are augmented by the extreme environment conditions and operation features that are needed. This paper attaches the problem for a new solution with fairly simple structure and task-oriented operation by using biomimetics inspiration.(9 pt)
2. Requirements for Service Space Robots
The International Space Station (ISS) is an internationally developed research facility that can be assembled within the Earth's orbit, Fig.2. The station is expected to remain in operation until at least 2015, and very likely 2020. The ISS serves as a research laboratory that has a microgravity environment in which crews conduct experiments in biology, chemistry, human biology, physics, astronomy and meteorology, [13].

ISS, the international space station, [13]
The space station was not constructed by space robots, but through many hours of human extravehicular activities with the assistance of Shuttle Remote Manipulator System (SRMS known as Canadarm) and Space Station Remote Manipulator System (SSRMS, Canadarm2). Because ISS is still under further development, and many other space stations will be built, there is lot of work for assembling, repairing, and monitoring that astronauts should do. Because of radiation, space debris, upper atmospheric drag and spacecraft electrostatic charging, a space station is easy to be damaged or broken in any place. Therefore, there are lot of activities for assembling repairing, and monitoring that astronauts must do. In addition, space environment is very dangerous for astronauts, so that space robots are urgently needed to be developed in order to assist or replace astronauts in extravehicular activity.
Since it is very difficult and expensive to send heavy objects to space station, a space robot should be as light as possible. The robots should work most of the time outside the space station with a large radiation level and severe temperature changes, and therefore they can be easily damaged or even destroyed. Consequently, a space service robot has to be light, easy to maintain, and with high reliability.
Application of a service robot in a space orbital station can be characterized and constrained by environment characteristics and operation tasks. In particular, space environment is characterized by the following aspects:
The condition of low gravity acting on the robot makes motion easier but also very sensitive to unexpected actions, even of small magnitude.
Strong radiation from the sun but also from the space can be dangerous and can even affect the operation of actuators and electronic devices up to the extent of causing them to fail.
Temperature of objects changes drastically between the sunny side and shady side.
In orbital stations, energy source is very limited and therefore energy consumption must be kept at a minimum.
A robot will use handrails and beams in outside structure of space station. In Fig. 2, ISS is provided of hundreds of handrails and beams that are located in the outside surface to help astronauts in EVA motions. Each handrail is distanced from the next one by the length of an astronauts reach with the design shown in Fig. 3. Beams are part of the structure of the space station and can be conveniently used as anchoring sites for robots too.

A typical design for hand rail in the outside surface of space stations
Similarly, operation tasks of space service robots in serving in orbital stations can be characterized by specific aspects as the following:
A robot helps or cooperates with astronauts in assembling, repairing and monitoring, but it should be able also to perform autonomous work even without astronauts supervision
Suitable robot mobility will ensure the work anywhere outside a space station
A robot can move slowly but with sure action results and firm positioning.
The above-mentioned characteristics and requirements of mobility aspects in service tasks with proper design and operation features can be useful to select and design a feasible structure of a space service robot. In particular, the environment frames and motion capabilities are the most demanding constraints and have motivated to look for a biomimetics inspired solution.
3. Conceptual Kinematic Design with Biomimetics Inspiration
In nature there are few animals that can move in environment frames with very different characteristics that can be considered similar to those in a space orbital station. Among them chameleons can be considered the most attractive inspiration since their motion capabilities and biological structure show features of robustness and compactness that meet somehow the above-mentioned constraints for robot space applications.
Arboreal habitats require many functional challenges, including bridging gaps between branches, travelling on perches with small diameter and obstructions created by the clutter of branches. Key morphological specializations of chameleons that probably facilitate accomplishment of these tasks are the prehensile feet and tail together with a robust leg structure. Behavior specializations of chameleons that facilitate arboreal locomotion include a slow, but stable, walking gait (Fischer et al 2010). In addition, they can use the tail as an additional arm to free two legs for other tasks by achieving a three-point grasping configuration, as shown in Figure 4 a). The three-leg configuration can be considered an optimal static posture to achieve stable positioning for a body in any environment. In addition, a chameleon moves slowly with the aim to achieve safe and reliable postures during its motions, likewise it is needed in space stations by astronauts or space robots. Though the structure of chameleon's foot is very simple, the foot can adapt to most intricate environments as shown in Fig. 4.

Examples of chameleons in their peculiar postures for different environments: a) on a tree branch; b) on a flat floor; c) on a rough curves surface
After a long evolution, the prehensile feet of chameleons are also able to grasp firmly tree branches since each foot is composed of only two fingers with metacarpal, proximal phalanx and digits, Fig.5. Chameleons can also walk on flat surfaces by opening the fingers to form a planar foot. In Fig. 4 a), when a chameleon moves on a branch, its foot is large enough to grasp the branch firmly and to hold its body. In Fig. 4 other configurations are shown, when a chameleon moves on a flat surface, a plane or a curved surface, respectively, by opening and adapting the fingers to the surface. As shown in Fig.4 a), chameleons can keep their body balanced by two legs with the help of tail as a third leg. With the two-finger feet they can walk and grasp objects and ground. Therefore, a chameleon-like robot for space service operations can be proposed by replicating the structure and operation of chameleons. A configuration for a space robot with three legs is also suggested by the posture of a chameleon in Fig. 4 a) as referring to the above-mentioned conditions for a static stable posture but also with a possibility of using a leg as an arm for contemporaneous manipulation purposes.

The structure and firm grasp of the two-finger foot of a chameleon
A chameleon-like robot can be characterized with legs of reduced size and motion power but with the possibility to be used as arms, and by being equipped with a foot extremity with only two powerful fingers that can be adjusted to grasp handrails or to attach surfaces during walking actions. Therefore, we have designed a chameleon-like robot with the conceptual kinematic scheme shown in Fig.6. The conceptual biomimetic idea lays in three legs/arms that can be used with interchangeable function thanks to the essential structure and multi-functional end-effector. The design configuration in Fig.6 recalls the chameleon configuration in Fig. 4a) by which the animal uses two legs as arms for other activities. With the proposed structure the space chameleon-like robot can move in most of the places of a space station by using rods, handrails and even flat/curved surfaces. A proper mobility in outdoor space of orbital stations is an essential capability for performing service tasks since a proper location and proper displacement can be considered a fundamental part of a service task. In addition, the proposed space robot can be light and highly reliable because of the compact mechanical design and essential actuated joints. The compactness and robustness of a mechanical design with the proposed kinematic structure is ensured by the low number of links in the structure of limbs, like wise in the chameleons.
A conceptual design of the proposed chameleon-like space service robot
The proposed chameleon-like robot is composed of one trunk and three legs. Cameras and other sensor equipment can be installed within or on the trunk, as well as other end-effectors and tools can be also stored on the platform body in order to ensure the robot capability in service for assembling, repairing, and monitoring works. Each leg is composed of one ball joint and one revolute joint so that a leg has four DOFs. The four DOFs make sure that the robot can move along and on the rods and handrails with a good mobility capability even in changing direction. In order to ensure the robot can move on the rods, a gripper-foot is installed on each leg, which has one DOF and can grasp a rod firmly. The configuration of the three legs can be symmetric so that the robot can be used with any posture and easily maintained because of a modular design with interchangeable parts. The kinematic design is illustrated in the sketch in Fig. 7 where in Fig. 7 a) a general configuration is indicated and in Fig. 7 b) the folded configuration is reported as suitable for the storage in the missile transporter or for storage during no use. In order to limit the weight of the robot to 300 N, the robot can be sized with the length of 25 cm for link1, the length of 20 cm link2, and the lengths of trunk sides are 30 cm.

A kinematic diagram of the structure of a chameleon-like robot for space applications: a) general configuration; b) folded configuration for transportation and storage
Following the biomimetics inspiration looking at chameleons, a new kind of foot can be designed for the space robot. In Fig. 8, a robot foot-hand is proposed with two fingers likewise that one of chameleons. Each finger has two phalanxes only and each phalange is driven by one direct motor with the aim to produce the necessary actuation torque Ti (i=l… 4). Alternatively, a reduced number of actuators can be thought by using one motor per finger and suitable mechanical transmission either by gears or belts to have the two phalanxes actuated by one motor in a proper coordination.

A conceptual design of a foot-hand extremity with actuation torque per phalanx
The phalanx structure of the foot-hand extremity can be used similarly to the chameleon foot with a variety of configurations, like those shown in Fig.9. The foot shown in Fig. 9 can move in most of the places of outside space station by grasping handrails like astronauts or by attaching surfaces. Some places cannot be reached because there are not handrails and a chameleon-like robot will move to these places by walking on the surface of the space station. Therefore, a kind of adhesive pad can be added to the foot to meet this requirement as indicated with black tips in Fig. 9 a) for a case with adhesive pad attaching on a surface.
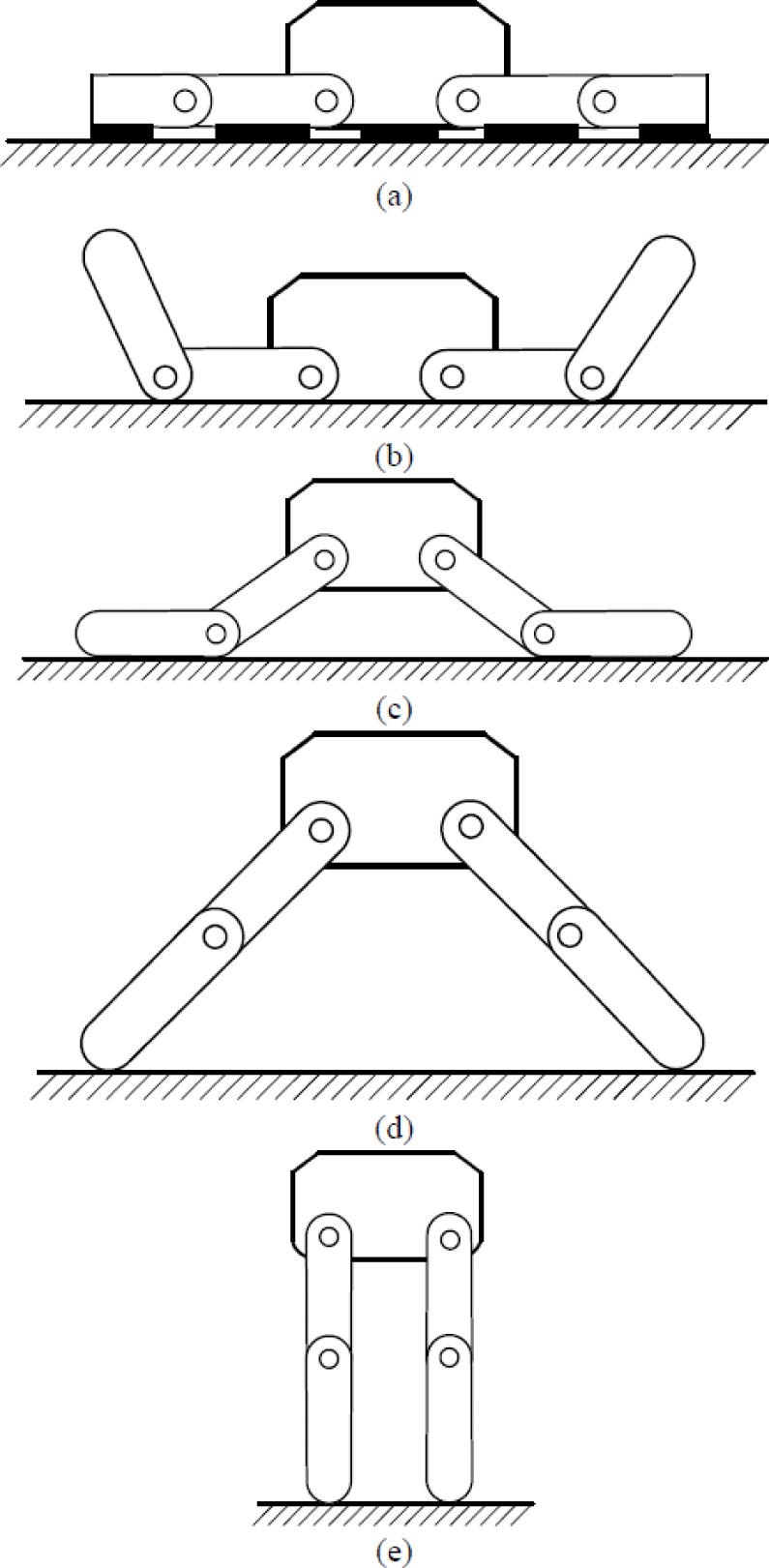
Finger configurations of the chameleon-like foot-hand extremity
Thus, the robot extremity can have two operation modes, namely grasping and adhesive attachments. The adhesive action mode can be used to walk on surfaces, as shown in the models of Fig.9 a) to c), by using proper forces in each tip. The grasping action mode can be used not only to grasp objects but also to touch and to interact with objects and ground surfaces in different way as depending of the required situations, as shown in the models in Fig. 9 d) and e).
Thus, the proposed chameleon-like service space robot can be characterized by a structure with a symmetric modular design with leg-arms and foot-hand extremities, which may recall the operation and structure of chameleons.
The stability of locomotion can be explained as due to the end-effector grasping. The parts of the chameleon features that are implemented in the robot design can be recognized in:
The foot/hand structure that can act either as foot (see Fig. 4 b and c) or as gripper (see Fig.5)
The same structure for the three legs /arms with interchangeable function as leg or arm (see Fig. 4a).
The possibility of the above-mentioned multiple functionality can be considered important in a service robot for space stations as to increase reliability and versatility of robot functioning.
The proposed robot has been conceived to answer to main requirements that are related to locomotion capability in station frames (handrails and curved/sloped surfaces), and firm positioning for performing tasks in or without cooperation with astronauts. The extreme environment conditions (in temperature and radiations) will affect the mechanical design and technology of the components, but they are not considered in this paper. Tow gravity has been considered in the simulation conditions for checking the feasibility of the motion and its sensitivity and for sizing the motion properties and actuating torques.
4. A performance characterization by simulation results
The proposed chameleon-like robot can perform two locomotion modes, namely revolving mode and walking mode. In the revolving mode, the feet grasp the handrails in successive actions, and the trunk of the robot rotates when the robot moves. In the walking mode similarly to chameleons, the robot moves only by using two legs to grasp rod-handrails while the third foot does not participate to the walking, and it can do some other tasks.
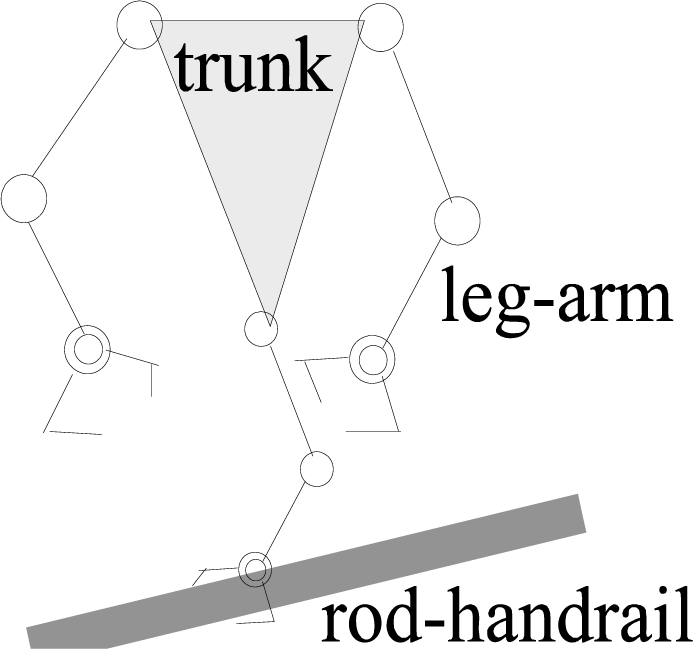
In order to characterize the motion capability of the robot, simulations have been computed in ADAMS environment by using a proper model as in Fig.10 with characteristic data for space environment such as 0.1 g for gravity field and low friction and damping at the joints of a mechanical design of the robot. Examples of simulated basic operations of the robot are reported in Figs. 11 and 13 to show the feasibility of the proposed conceptual design and its basic operation capabilities with proper features for mobility in servicing in outdoor space of orbital space stations.

A scheme for a simulation model of the robot in Fig. 7 the with motion parameters

Simulation results of the robot motion by walking mode: a) along a straight rod; b) changing direction between two skewed rods

Simulation results of the robot motion by revolving mode: a) along a straight rod; b) changing direction between two skewed rods

Simulation results of the robot operation in handling objects
The simulation results in Fig. 11 show the robot locomotion in walking mode both for a straight motion along a rod-handrail and a motion with changing direction in skewed rods-handrails. Similarly, the simulation results in Fig. 12 show the robot locomotion in revolving mode along a straight rod-handrail and skewed rod-handrails. The simulation results in Fig. 13 show the robot handling an object with two arms while the third leg-arm grasps firmly a rod-handrail by simulating a service action.
The reported simulations in Figs 11 and 12 show the robot ability to move to everywhere outside the space station if there are rods-handrails. The last simulation in Fig. 13 shows the ability of different cooperation of the arm-legs so that the robot to use various configurations of its arm-legs. The reported simulations snapshots show suitable motion capabilities of proposed space service robot with chameleon-like simple robust behavior.
In particular, the reported sequence of robot postures during the walking modes show smooth motion of the robot and well balanced robot configurations that can be recognized as important features for a reliable locomotion in outdoor space. Although the simulations are focused on the walking motion, the shown postures can be understood also as suitable configurations for manipulation tasks by using the third leg/arm free from the walking activity. In Fig.13 this capability is emphasized with the use of two limbs in a robot configuration that recalls the chameleon posture of Fig. 4 a).
The computed simulations have been useful also to define a first mechanical design with basic features in term of suitable ranges of joint mobility, proper actuating motor torques, and feasible grasping-contact force of the gripper-foot extremities.
In particular, the following remarks can be observed from the numerical results of the simulation for a single step as reported in Figs.14 to 17:

Plots of the joint angles of three legs vs time as numerical results of the simulation of straight walking mode in Fig. 11a): a) for legs B and C; b) for leg A

Plots of the actuating torques of three legs vs time as numerical results of the simulation of straight walking mode in Fig. 11a): a) for leg A; b) for leg B; c) for leg C

Plots of the joint angles of three legs vs time as numerical results of the simulation of revolving mode in Fig. 12a): a) for leg A; b) for leg B; c) for leg C

Plots of the actuating torques of three legs vs time as numerical results of the simulation of of revolving mode in Fig. 12a): a) for leg A; b) for leg B; c) for leg C
in the walking mode in a single step motion one leg is not involved in walking activity and the other two have a smooth motion in joint angles with a range of about 100 deg for each leg joint with clear sequence in supporting and swing phases, Fig. 14;
from Fig.15 in the walking mode the actuating torque operate within a range of about 300 N mm with maximum peaks of 500 N mm; but the operating values are computed before 15 sec with a maximum value of 50 N mm. The large computed values at the end of the simulation are mainly due to vibration in the stopping phase;
from Fig.16 in the revolving mode all the legs move with a motion smoother than in the case of walking mode; the range in joint angles is of about 100 deg for each leg joint yet, but with a longer duty cycle;
from Fig.17 in the revolving mode the actuating torque operate within a range of about 500 N mm with peaks of 800 N mm maximum; but the operating values are computed before 15 sec with a maximum value of 50 N mm like in the waling mode. Again the large computed values at the end of the simulation are mainly due to vibration in the stopping phase;
in both modes the most active joint with largest actuating torque is joint 2 in the shoulder design since it is the main source of the motion.
The simulation results refer to the locomotion capabilities of the robot and its firm posture. Energy consumption can be estimated by using results of the simulations as the sum of required energy for all the joints during the motion. Thus in the case of both simulated locomotion modes the energy consumption can be estimated as 0.1 J/step/joint that gives approximately a total consumption of 0.2 J/sec during walking.
The force and torque applied to the space station by the robot can be considered as the ground actions that the robot exerts during locomotion. The simulation results are not reported since they show very small values as due to light design of the robot in low-gravity environment. Considering a total mass of 30 Kg for the robot and because of the slow motion (1 step in 5 sec) the actions that the robot exerts on its contact with the orbital station on the handrails or rods can be calculated approximately with a maximum value of 30 N in orthogonal direction, 100 N in tangential direction with high necessary friction and a torque of 1.5 Nm.
The simulation results are reported in terms of leg joint angles and actuating torques to stress the feasibility of the operation of the chameleon-like space robot in basic operation for both locomotion modes. In fact, both the kinematics of the leg joints and actuator torques show values and time history that are feasible for a practical implementations in service tasks in space orbital stations since they refer to possible motion planning and acceptable torque efforts in astronautic solutions.
5. Conclusions
A new chameleon-like robot is proposed and simulated for service applications in helping astronauts to do assembling, repairing, and monitoring works outside space orbital stations with a proper capability and flexibility in locomotion. The proposed conceptual kinematic design is obtained as a result from an analysis of operation problems and requirements in space stations and by looking at a biomimetics inspiration. The novel robot design is composed of one trunk and three legs/arms with a two-finger gripper-foot extremity by looking at the structure and operation of chameleons to ensure robust, compact, and light design. Simulations have been used to characterize the basic performance in two modes of mobility and to give first indications for a feasible design of a first prototype. Results and contributions of the paper can be summarized in presenting the new conceptual design with chameleon-like characteristics in Figs. 6 to 10 as: compact design as stressed in Fig.7, versatility in locomotion capability as outlined in Fig.6 and more clearly in the simulations of Figs.11 and 12, mutifunctionality for service tasks through the design of leg/arm with foot/hand in Figs 8 and 9. Future work is planned for experimental validation and performance testing of a prototype under construction at IRI in Beijing.
Footnotes
6. Acknowledgements
This work has been developed within a collaboration between LARM and IRI of BIT key-lab through visits exchanges among the authors in the years 2010–2014 with partial support from Basic Scientific Research (Grand No. A2220080252), 111 Project (Grant No. B08043), and the National High Technology Research of China (863 Project) (Grant No.2009AA04Z207).