
Abstract
In the paper, safety issues are examined in a scenario in which a robot manipulator and a human perform the same task in the same workspace. During the task execution, the human should be able to physically interact with the robot, and in this case an estimation algorithm for both interaction forces and a contact point is proposed in order to guarantee safety conditions. The method, starting from residual joint torque estimation, allows both direct and adaptive computation of the contact point and force, based on a principle of equivalence of the contact forces. At the same time, all the unintended contacts must be avoided, and a suitable post-collision strategy is considered to move the robot away from the collision area or else to reduce impact effects. Proper experimental tests have demonstrated the applicability in practice of both the post-impact strategy and the estimation algorithms; furthermore, experiments demonstrate the different behaviour resulting from the adaptation of the contact point as opposed to direct calculation.
1. Introduction
Since the very beginning of industrial robotics, a great deal of attention has been paid to robot safety [1]. The first line of defence has always been to take all measures to enforce segregation between robot and human.
However, the segregation paradigm fails in cases where the human and the robot must share the physical environment and in applications in which successful task completion requires collaboration.
Furthermore, the presence of autonomous behaviour – due to the fact that it is impossible to model every action in an unstructured anthropic environment – can result in dangerous situations for humans co-habiting a robot's operational domain.
Many crucial aspects of robot behaviour in human environments can result in danger, such as natural motion, unexpected behaviour caused by required autonomy, and faults. It is clear as to the extent to which physical issues relating to contact are crucial, since the “natural” or unexpected behaviour of people during their interactions with robots can result in very severe injuries caused by accidental collisions.
The most revolutionary and challenging feature of the actual generation of robots is physical human-robot interaction (pHRI). In pHRI, humans and robots share the same workspace, come into contact with each other, exchange forces and cooperate in performing actions in the environment.
Therefore, pHRI occurs when a robot cohabits and cooperates with a human in such applications as assisted industrial manipulation, entertainment, rehabilitation and surgery.
In summary, when a robot manipulator operates in an unstructured environment or shares its workspace with a human user, safety issues are a primary concern and collisions constitute one of the major sources of risk to safety in pHRI. Therefore, the problem of collision detection is an important issue for research in pHRI, both for collision avoidance and for reaction strategies following collisions.
Indeed, in applications requiring pHRI – not only because of the unexpected impacts of robots with humans but also for the execution of collaborative tasks requiring the intentional exchange of forces – robots must be designed with a high degree of compliance so as to ensure safety.
Considering the importance of collision detection and reaction strategies in pHRI, this paper introduces a list of related works (Section 2). Furthermore, in Section 3 we present a new approach to the estimation of joint torques due to non-impulsive contact and compare it with the residual-based method; the approach can also be used as a method for collision detection [2].
Robot compliance is useful in order to reduce interaction forces, both in the case of a collision and during physical collaboration between humans and robots. In the first case, once an undesired physical collision has been detected, the robot should switch as quickly as possible from the control law associated with normal task execution to a reaction control law, where the joint torques due to the contact must be reduced. In view of this, we also elaborate a reaction strategy.
In the case of intentional contact, due to the execution of collaborative tasks, an algorithm for the estimation of both the contact point and interaction forces is proposed in order to predict human motion intentions when a contact occurs at an unknown point of the robot manipulator (Section 4).
Some experimental findings are presented in Section 5. Finally, Section 6 concludes.
2. Related Work
The detection of physical collisions is a basic feature of the safe control of robot behaviour, since collision avoidance cannot always be guaranteed.
To be useful, collision detection must be highly efficient so as to ensure a prompt robot reaction. This limits the use of sensors, such as cameras, which are ineffective in the case of fast interactions because of their low bandwidths.
Pre-empting contact between a human and a robot (or between a robot and the environment) or detecting it in real-time is typically based on the use of external sensors, such as a sensitive skin sensor [3]- [4], to detect nearby objects in an unknown or time-varying environment, on-board vision [5], based on images taken from several stationary cameras in the work cell, strain gauges [6], and tactile sensors [7] and force/torque sensors, used to identify a hazard when unplanned contact occurs [8].
A different method is to consider every object in the environment – including any humans – as an obstacle, and to use a real-time obstacle avoidance strategy, such as in [9].
An alternative approach to safety in pHRI is presented in [10]; it is called control effort-based intent detection. It uses the principle of the preservation of zero momentum: the momentum that is delivered by human impact is just the negative of the momentum that is delivered by the control effort. Therefore, the detection signal is fed into the control loop in such a way that it changes the reference position.
Furthermore, in [11] a method is presented based on the adaptive filtering of residuals to address the issue of robustness in the modelling of uncertainties. The evaluation algorithm is based on the grey-box modelling of the residuals, which takes into account acceleration-related uncertainties and speed-dependent non-linearities. Adaptive filtering is used to produce a dynamic threshold.
Collision detection in the absence of external sensing devices can also be realized by the suitable comparison of commanded motor torques and measured proprioceptive signals [12] – [13].
In addition, note that if the collision is assumed to occur at the end-effector level, the kinematic redundancy of the arm may be used to minimize the instantaneous effect of an impact [20]. Indeed, while executing a desired end-effector trajectory, the arm may continuously change its internal kinematic configuration in order to minimize the inertia seen at the end-effector.
A notably efficient algorithm that uses only encoder positions is based on the monitoring of the generalized momentum of the mechanical system ([2], [15]), which also allows for the identification (isolation) of the colliding link on the robot. The idea in [2] is to manage a collision at a generic point along the robot as a fault of its actuation system; during free motion, all the residuals are practically zero. The increase of a given residual above a fixed threshold means that a collision has occurred; when the contact ceases, the residuals quickly return to zero.
To ensure the safety of the interaction, the system should also incorporate safe planning and post-collision control strategies in order to reduce the impact due to the contact or else to immediately remove the robot from the collision area. In generally, studies have focused on either slowing down or stopping when a hazardous situation is identified [17], moving to evade contact [18] or trying to minimize the impact force whenever contact occurs [19]. Nevertheless, in the case of redundant robots, it is possible to maximally preserve the execution of the end-effector task by projecting the reaction torques into the null space of the main task [20].
An alternative approach is proposed in [21], where a measure of danger during interaction is computed based on factors affecting the impact force during a potential collision between human and robot. This danger index is then used as an input for real-time trajectory generation when the index exceeds a predefined threshold. The alternate trajectory generated by a safety module tries to lower the danger present in the interaction; therefore, the goal of the safety module is to generate a plan to move the robot to the safest possible location in real-time, and then issue a request to the planner module to generate a global plan, either for retraction or else to continue the initiated task.
Impedance control represents an effective approach to actively controlling a robot's compliance usually during the interaction of the end-effector [22]-[24], or also during the execution of visual servoing tasks [25]. However, an active compliance behaviour can be also imposed upon the joint variables to enhance safety [26]-[29]. A Cartesian impedance control for torque-controlled flexible joints and redundant robots was investigated thoroughly in [30]. An impedance control problem with null space stiffness control for seven degree-of-freedom (DOF) flexible joint arms, based on a singular perturbation approach and a passivity-based approach, was addressed in [31] and [32], respectively. Furthermore, a novel safety control method incorporating fuzzy logic is proposed in [33] so as to guarantee the safety and robustness of an upper-limb rehabilitation robot control system by means of a position-based impedance controller, implemented in order to achieve compliance between the end-effector and the impaired limb during a period of rehabilitation training.
An alternative algorithm, proposed in [34], is based on a simplified sensorless estimation of external forces and the saturation of joint control torques to keep the effective external forces within safety levels, and which can be efficiently integrated with robotic position control systems. Finally, an interesting approach is presented in [35]. In particular, the post-impact phase is solved by switching to a hybrid force/motion controller that regulates the interaction forces. The directional information on interaction forces provided by the identification scheme is used to safely drive the robot away from the human: the PD control applied during the pre-impact phase switches under the reflex strategy, that turns out to be more friendly, after a collision detection.
3. Collision Detection
In this section, robot manipulators are considered as open kinematic chains of rigid bodies, having n (rotational) joints with associated generalized coordinates
Using a Lagrangian approach, the dynamic model of an n-DOF robot is:

where q is the n-vector of the joint variable,

is the
3.1. Residual Torque Estimation
In this section, we will consider the problem of the real-time detection of collisions between a robot manipulator and obstacles of an unknown geometry and location in the environment without the use of extra sensors, taking in account that a collision may occur at any point along the robot arm.
3.1.1. The momentum-based method
For the model (1), a method based on generalized moment computation to detect a collision and to identify the link where the contact occurs was originally proposed in [2]. The main idea pursued in [2] is to handle the collision as a form of faulty behaviour on the part of the robot actuating system. In fact, the dynamic effect of a Cartesian contact force is that of an additional joint torque with respect to that commanded. Therefore, robot actuator fault detection and isolation (FDI) technique [16] can be used. This method requires only proprioceptive measures

is defined a residual signal:

with

which is a first-order stable linear filter driven by the joint torques due to the collision.
In the ideal situation, for a large value of
During free motion, all the residuals are effectively zero; in response to a generic collision, r raises exponentially with the time constants given by the elements of the diagonal matrix
A physical collision will then be detected as soon as
Furthermore, by means of the momentum-based method, we are able to identify the robot link that has collided. Considering
3.1.2. The error-based method
In this section, we propose a new approach for the estimation of the joint torques due to contact. This simple alternative to the momentum-based method is based on the tracking error residual when the following computed torque control strategy:

is supposed to be applied to track the desired position

as a residual approximation. This method is particularly attractive due to the fact that is computationally effortless. Furthermore, as we can see in Section 4 by means of suitable experiments, in comparing the residual torques estimated by means of the error-based method and the momentum-based method it is easy to see that the latter is more noisy. However, the computation of the residual does not depend on the particular control law and can also be useful for other applications (for example, for collision detection). The price paid is dependence on the complete dynamic model of the robot.
3.2. Post-collision strategy
This section considers the problem of controlling a robot manipulator in the task space while ensuring compliant behaviour given the occurrence of a collision.
During the post-impact phase, the first task is to detect the collision, which may have happened at any location along the robot arm. The controller should then switch to an appropriate reaction strategy, the most simple one being to stop the robot.
However, this would not remove the arm from direct contact with a human, generating an unpleasant feeling of permanent danger or even squeezing the person in a narrow environment.
Instead, once an undesired physical collision has been detected, the robot should switch as quickly as possible from the control law associated with normal task execution to a reaction control law, under which the joint torques due to the contact must be reduced.
In this section, we propose a reaction strategy and compare it with the joint space impedance control presented in [37]. Impedance control is one of the most frequently adopted methods for controlling the interaction between a manipulator and the environment. Indeed, the joint space impedance control guarantees the compliant behaviour of the robot joints. The joint space impedence equation is:

where
Notice that the impedance behaviour (8), with a freely chosen desired inertia matrix
Therefore, following simple algebra:

where the error
During collision, we adopt the same control strategy by redefining the desired trajectory as:

Hence, the previous control law becomes:

After some algebraic manipulation, and as with equation (9) above:

where
The (12), considering (10), leads to the closed-loop dynamics:

where

Therefore, more compliant behaviour is obtained:

Indeed, the (15) suggests that the effect of the post-collision strategy (10) is that of decreased equivalent inertia, damping and stiffness matrices by a factor larger than one.
In comparing the joint space impedance control proposed in [37] and the reaction strategy just proposed, it might be noted that although the former allows for the compliant behaviour of the robot (as is evident in the relation (8)), the error dynamic turns out to have a limitation due to the fact that it is dependent upon the matrix
The expected outcome is that the robot becomes more able to move in the direction given by the human (or at least as determined by the contact). When the contact ceases, and in the absence of further collisions, the residual will return to zero and the robot will bounce back in the pre-impact motion.
4. Contact Point and Force Estimation
Physical collaboration is characterized by force exchanges between the human and the robot, which may occur at any place along the robot's structure. In the absence of a distributed force/tactile measurement system, an indirect evaluation of the contact force is required to predict human motion intentions and to react accordingly. Therefore, in the remainder of this section, we will provide an algorithm to estimate both the contact point and the interaction forces for a
The method employed, starting from a residual joint torque estimation, allows both direct and adaptive computation of the contact point and force, based on a principle of the equivalence of the contact forces.
With reference to Figure 1, let us consider that a contact force

Equivalence of the force-torque contact on link j
Although a point-wise collision can occur at any point along the robot arm, the contact can be estimated by considering the Jacobian matrix for any fixed point, such as point P, provided that:

In order to estimate the contact force corresponding to the contact point P, the mapping should be inverted, and the simplest way to do this is by using the pseudo-inverse of the Jacobian matrix:

where:


Therefore, the residual contains an indirect estimate of
However, this should not be considered to be a serious limitation since such force components do not produce active work in the robot coordinates q.
Furthermore, within the framework of collaboration between human and robot, and carried out as an intentional contact, it could be useful to localize the impact. Actually, if the contact point belongs to the allowed collaborative parts of the robot and the human, both the collision avoidance and the robot reaction based on the residual should be disabled.
Therefore, we next show how to estimate the contact point by means of a direct method and by means of an adaptive method.
Given (19), it is possible to estimate the contact point in the planar case with

being:

where
Furthermore, although in the planar case the moment
Due to the fact that the moment in the contact point is zero, an adaptive approach can be considered, the purpose of which is to minimize the estimated moment. Considering both (20) and (21), and choosing:

with:

it is simple to prove that
Note that in case of the 2-DOF planar robot, to apply this algorithm we must decrease the problem dimension by adding further information about the contact force (i.e., that the contact force is directed along the normal vector to the obstacle surface). In this case, we obtain a square Jacobian matrix by simply projecting the original Jacobian matrix onto frame j and cancelling the first row of the obtained matrix, corresponding with the first column of the transpose and which multiplies a null force component by the hypothesis.
5. Experimental Results
The control approach proposed in this paper has been tested on a scenario in which a robot manipulator executes a motion task and a human operator enters into its workspace.
The experimental setup consists of a two-link planar robotic manipulator directly driven by variable reluctance motors (NSK Megatorque: stall torque 250 Nm for link 1 and 40 Nm for link 2), as shown in figure 2. Furthermore, the manipulator is equipped with two resolvers and resolver-to-digital converter boards equivalent to a 19,200 ppr incremental encoder.
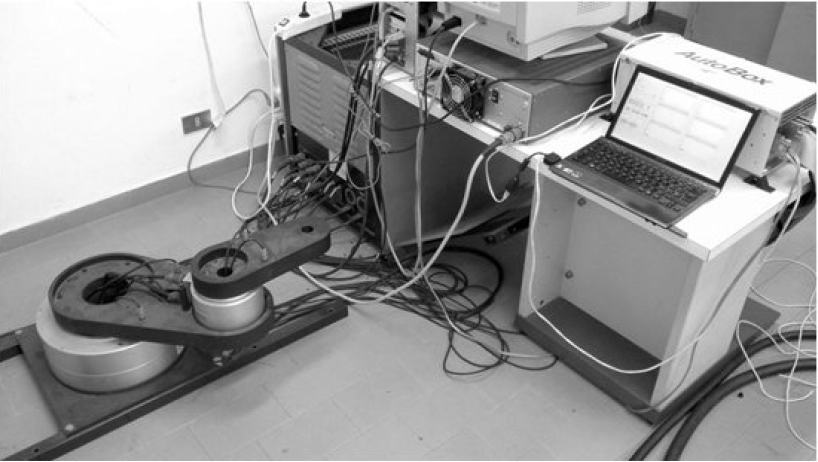
Experimental setup: the 2-DOF planar robot
The robot is controlled by a dSpace DS1103 PPC Controller Board and industrial controllers designed for torque control loops with
An advanced real-time interface software from dSpace and a simulation environment are also used, which permits the fast, safe and reliable prototyping of the planning and control algorithms. Indeed, this interface automatically generates real-time code from Simulink models and implements it on dSPACE real-time hardware. The controller parameters are:
Finally, the manipulator is controlled subject to constant joint angles and a normal force (measured with a FlexiForce piezoresistive force sensor, as in figure 3) is applied near the tip in an unknown position. In figure 4, the schematic structure of the control system can be seen.
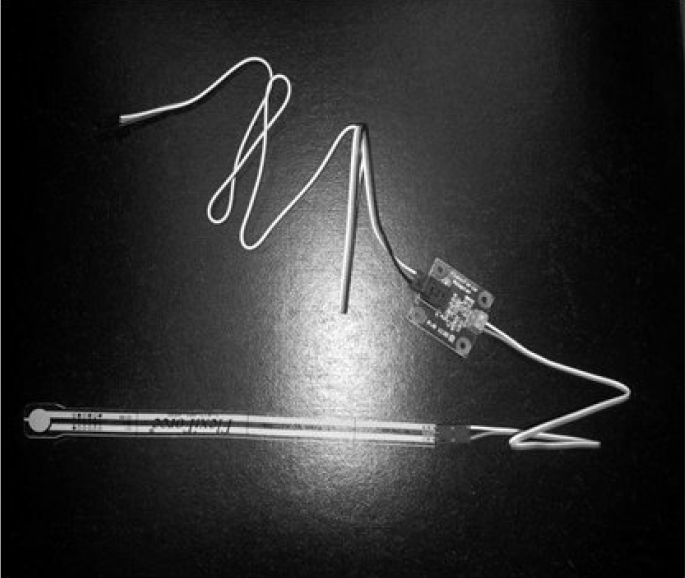
The flexi-force sensor to measure the contact force
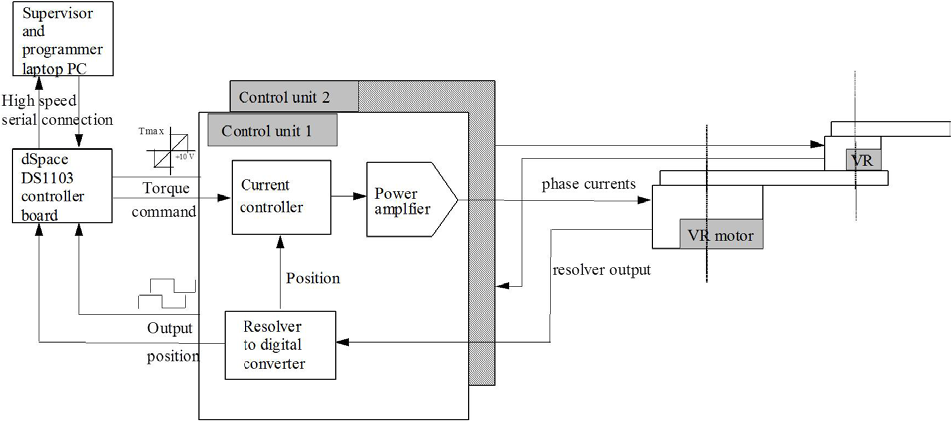
Schematic structure of the control system
One aim of the experiments performed on the industrial manipulator is the comparison of the estimated contact point and contact force by means of both the momentum-based method and the error-based method. In addition, another purpose of these experiments is the comparison of the different ways to estimate the contact point, namely direct computation (cfr. eq. 20) and the adaptive method (cfr. eq. 22 and 23). Furthermore, two different sets of experiments are considered. In the latter, the performance of the reaction strategy proposed in Section 3 is evaluated in pursuing a more compliant robot in a scenario in which a human experiences contact with an industrial robot.
5.1. Experiment 1
The same experiment is repeated to show the performance of the estimation algorithms, namely by using both the momentum-based method, proposed in [2], and the error-based method presented in this paper.
The comparison of the estimated contact point and the contact force is shown in Figures 5–8.

Joint 1 contact torque estimation
In Figure 5 and Figure 6 can be seen the estimations of the torques due to contact for both joint 1 and joint 2; both the momentum-based method (3) and the error-based method (6) give the same shape; however, under the momentum-based method the identified residual torques are more noisy and, therefore, so are the identified contact force and contact point. This is due to the fact that the momentum-based method uses the control torques signal to estimate the residual. However, the computation of the residual does not depend on the particular control law and can also be useful for other applications, such as collision detection.

Joint 2 contact torque estimation
In the Figure 7, the comparison between the measured contact force and the estimation using both the Momentum-based and error-based methods can be observed.

Estimation of the contact force

Estimation of the contact point
The contact point, estimated by means of both the momentum-based and error-based algorithms, is at this stage only made by considering the adaptive method. Observing Figure 8, it can be observed the convergence of the contact point estimates to its true value, save for a constant but significantly small error in the case of error-based method. However, the error remains non-null, especially during the interaction, because of the presence of a considerable amount of joint friction. Finally, for completeness, the time history of the estimated contact torque is reported as well (see Figure 9).

Estimation of the contact torque
Furthermore, comparing the plot of the time histories of the estimated contact point (see Figure 11) and the estimated contact torque (see Figure 12) in relation to the different ways of estimating the contact point (namely, direct computation (18) and the adaptive method (20), (21)), it can be observed that the adaptive method is able to drive the estimated moment to zero as well, and that it allows the convergence of the contact point to be estimated to its true value. In particular, for Figure 12, the difference should be noticed when considering direct computation and the adaptive method, due to the totally different means of estimating. Indeed, under the direct method the estimation is made on an momentum-based algebraic computation of each instant; however, in the adaptive case the estimation is based on the adaptation of the contact point estimation in pursuing the minimization of the momentum.

Estimation of the contact point by means of direct computation and the adaptive method
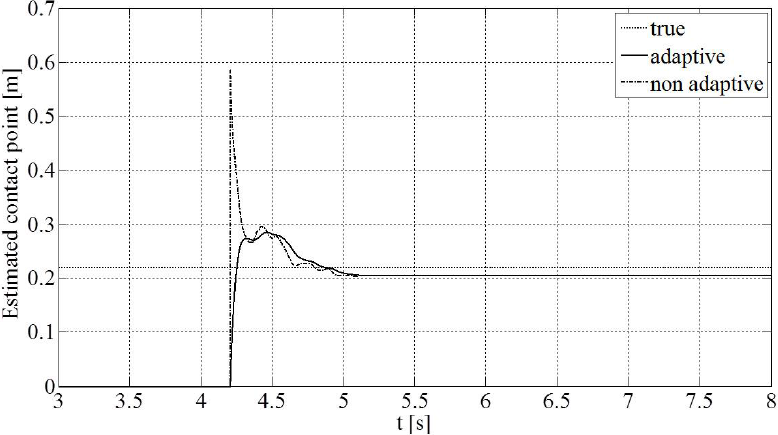
Estimation of the contact point by means of direct computation and the adaptive method
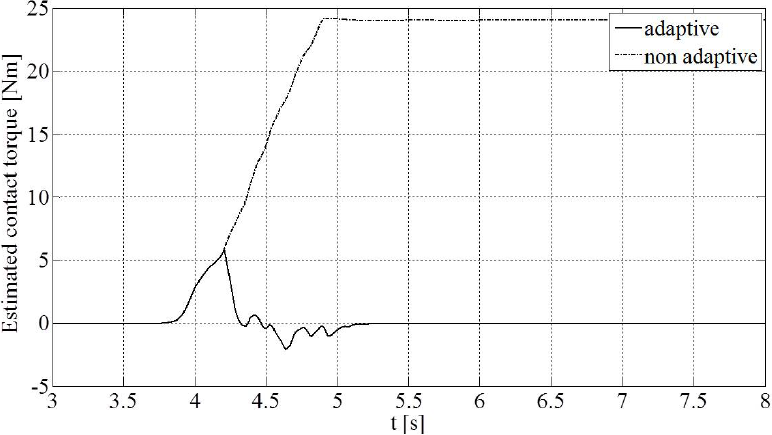
Estimation of the contact torque by means of direct computation and the adaptive method
The shape of the estimated contact force is the same because of the relation (16) for both methods, and thus it is not reported for brevity.
5.2. Experiment 2
The main aim of this experiment is the validation of the reaction strategy proposed in this paper, namely the increased compliance of a robot after a contact with a human at an unknown point on the robot.
This purpose is achieved in figure 13 and in figure 14, where the position errors for both joints and the estimated force are shown, respectively. As a matter of fact, it can be noticed that the force-error ratio is equivalent to the assigned compliance.

Joint position errors

Estimation of the contact force
Furthermore, in figure 10 and in figure 15, both methods for estimating the contact point presented in this work are compared, namely direct computation and the adaptive method. In these figures, as well as for the first experiment, it can be seen that the adaptive method allows for the convergence of the contact point estimates to their true value.

Estimation of the contact torque by means of direct computation and adaptive method
6. Conclusion
In this paper, safety issues are examined in a scenario in which a robot manipulator and a human perform the same task in the same workspace. During the task execution, the human should be able to physically interact with the robot, and in this case safety conditions must be guaranteed. At the same time, all unintended contact has to be avoided, and suitable post-collision strategies should be adopted to reduce any impact effects.
Therefore, compliant behaviour should be ensured when a collision occurs. Once an undesired physical collision has been detected, the robot switches as quickly as possible from the control law associated with normal task execution to a reaction control law.
In this work, for the purpose of moving the robot manipulator away from a collision, a reaction control law is proposed where the joint torques resulting from the contact are reduced. The effect of this strategy is to obtain a more compliant robot which is predisposed to move in the direction given by the human (or at least by the contact).
Furthermore, within the framework of intentional contact, the interaction force estimation is important to predicting human motion and reacting accordingly. For this purpose, a method has been proposed for the estimation of both the contact force and the contact point for a n-link manipulator in point contact (with zero moment) with the environment.
Suitable experimental tests pointed to the applicability – in practice – of both post-impact strategies and estimation algorithms; furthermore, the experiments demonstrate the different resulting behaviours by using the adaptation of the contact point instead of direct calculation.
Footnotes
7. Acknowledgements
This work was supported by the Italian Ministry of Education, University and Research- Research Project of National Interest “ROCOCO” (PRIN 2009).