
Abstract
Since neural oscillator based control methods can generate rhythmic motion without information on system dynamics, they can be a promising alternative to traditional motion planning based control approaches. However, for field application, they still need to be robust against unexpected forces or changes in environments so as to be able to generate “natural motion” like most biological systems. In this study a biologically inspired control algorithm that combines neural oscillators and virtual force is proposed. This work gives the condition with respect to parameters tuning to stably activate the neural oscillators. This is helpful to achieve motion adaptability to environmental changes keeping the motion repeatability. He efficacy and efficiency of the proposed methods are tested in the control of a planar three-linkage robotic arm. It is shown that the proposed controller generates a given circular path stably and repeatedly, even with unexpected contact with a wall. The adaptivity of motion control is also tested in control of a robotic arm with redundant degrees of freedom. The proposed control algorithm works throughout the simulations and experiments.
1. Introduction
Conventional approaches to robot control based on motion planning need dynamic information on a system. Joint accelerations for a given motion objective are first identified, and then the required joint torques for the joint accelerations are calculated from the system's equations of motion. Though such approaches can manipulate limb motion very precisely, they usually work only when perturbation forces are smaller than the inertial forces. The computational cost for the control of a complex system may also go beyond the capacity even of the latest CPGs.
It has been recognized that non-mammalian and invertebrate species can generate rhythmic motion and cope with external perturbations adaptively [1]. Since they do not have an advanced central nervous system as in a human body, such adaptive control may not be possible through precedent learning or improvisation, as used in conventional motion planning based control approaches. As an alternative, CPG control is believed to generate rhythmic movements in accordance with the natural frequency of a biological system [2,3].
CPGs, neural oscillator networks coupled to limbs' sensory systems, can efficiently provide alternate motor commands to the muscles through afferent feedback of the sensory signal. CPGs have been successfully implemented to control multi-DOF robotic systems [4,5].
The relevant mathematical form and deduced stability conditions were developed by Matsuoka [6,7]. But control of the robot locomotion in the presence of environmental changes or unexpected disturbances remained challenging until Taga et al. developed robust control algorithms able to incorporate the sensory signal of a biped robot as feedback signals [8,9], and showed that the entrainment property of the neural oscillators could make the control robust to perturbation. This approach was applied later to various locomotion systems [10–12].
Efforts have been made to improve the capabilities of robots using biological inspiration. Williamson created a humanoid arm motion based on postural primitives. The spring-like joint actuators allowed the arm to safely deal with unexpected collisions, sustaining cyclic motions [13]. He also proposed a neuro-mechanical system, coupled with the neural oscillator, for controlling rhythmic arm motions [14]. Arsenio [15] suggested a multiple-input describing function technique to control multivariable systems connected to multiple neural oscillators. For periodic motion control, the virtual holonomic constraint concept was applied to the “Furuta Pendulum” [16].
While application of the neural oscillators to the arm control was shown to generate natural adaptive motion, the validity of the generated motion was still in question. For example, tracking of a complex trajectory by a robot arm gives a different output motion depending on the parameters of the neural oscillators. Tuning methods through parameter optimization have been widely investigated [17–19].
Apart from the proposed parameter optimization method, the present authors have previously presented a VFI-based control approach employing the neural oscillator network to encourage a self-adapting motion that works irrespective of redundancy of degrees of freedom (DOFs), sustaining motion repeatability of the joints [20,21]. The proposed control method, “VFI-based control”, has been verified successfully through simulations and experiments with unknown disturbance, and has been shown to solve ill-posedness with a redundant robotic arm. However, some problems remain unsolved, such as parameter optimization in real time and gain modulation for controlling the relative magnitudes between virtual forces and neural outputs. This is because the torque input has an effect on the behaviours of the robotic arm being controlled with respect to achieving a desired task, keeping repeatability, and sustaining an adaptive motion with external disturbance.
In this paper, we investigate the properties of the VFI-based control method with the robotic arm according to the tuning of the gains of the parameters. Then, we look at how to modulate the gains, making a comparison between the torque inputs mentioned above. Through this, the proposed control scheme employing the VFI-based control method is acquired. In the following section, a neural controller is briefly explained. The proposed control scheme is described in Section 3 to design the parameters of the neural oscillator with an external force for a desired task. Details of dynamic responses for the verification of the proposed method through simulations are described and discussed in Sections 4 and 5, respectively. Finally, conclusions are drawn in Section 6.
2. Rhythmic movement using a neural oscillator
We use Matsuoka's neural oscillator consisting of two simulated neurons arranged in mutual inhibition as shown in Figure 1. If gains are properly tuned, the system exhibits limited cycle behaviours. We propose a control method for dynamic systems that closely interacts with the environment, exploiting the natural dynamics of Matsuoka's oscillator.

Schematic diagram of Matsuoka Neural Oscillator

where x ei and x fi indicate the inner state of the i-th neuron for i =1˜n, which represents the firing rate. Here, the subscripts ‘e’ and ‘f’ denote the extensor and flexor neurons, respectively. ve(f)i represents the degree of adaptation and b is the adaptation constant or self-inhibition effect of the i-th neuron. The output of each neuron ye(f)i is taken as the positive part of x i and the output of the oscillator is the difference in the output between the extensor and flexor neurons. ω ij is a connecting weight from the j-th neuron to the i-th neuron: ω ij are 0 for i≠j and 1 for i=j. ω ij y i represents the total input from the neurons arranged to excite one neuron and to inhibit the other, respectively. Those inputs are scaled by the gain k i . T r and T a are the time constants of the inner state and the adaptation effect, respectively, and s i is an external input with a constant rate. ωe(f)i is a weight of the extensor neuron or the flexor neuron and g i indicates a sensory input from the coupled system, which is scaled by the gain k i .
Figure 2 shows two types of mechanical systems connected to the neural oscillator. The desired torque signal to the i-th joint can be given by


Neuro-musculo-skeletal model and a simplified biologically inspired mechanical system coupled to the neural oscillator
3. Control scheme
In the proposed control method illustrated in Figure 3, a virtual force at the end point induces a robotic arm to a desired motion. A virtual spring and damper yield a specific force, which is transformed into equivalent torques in terms of Jacobian transpose [22,24]. Here, each joint of the robotic arm is coupled with the neural oscillators, respectively. Due to the intrinsic entrainment property of the neural oscillator, the coupled joint enables the robot arm to exhibit an adapting motion according to environmental changes or unknown disturbances performing an objective motion [20,21]. In addition, such results include motion repeatability of joints in certain regions of the joint space with redundancy of degrees of freedom (DOFs).

Schematic robot arm model controlled by the VFI-based control approach
3.1 Stable condition for oscillator-based control
For biologically inspired motion in VIF-based control, the entrainment property of the neural oscillator is activated fully. Essentially, this becomes possible within the condition of stable oscillations of the neural oscillator. For stable oscillations, if tonic input exists, T r /T a should be in the range 0.1˜0.5, for which the natural frequency of the oscillator is proportional to 1/Tr. Therefore, note that the natural frequency of the output signal of the neural oscillator is tuned by the time constants. The magnitude of the output signal also increases as s i increases, and the minimum gain k i of the input signal enlarges the entrainment capability. In this case, regardless of the generated natural frequency of the neural oscillator and the natural frequency of an input signal, the output signal of the neural oscillator locks onto an input signal well in a wide range. With these properties in changes of the parameters, we can write the following:

If the final condition of (3), which can be taken from our previous work [21], is satisfied and the synaptic weight ω is large enough (though it must be small compared with b, the network continues oscillating for any large disturbances. In simulation, the neural oscillator set with Table 1 (with sensory gain k2), satisfying the condition of (3), shows the stable oscillation owing to mutual inhibition between the oscillators as shown in Figure 4. Figure 5 illustrates the entrainment procedure of the neural oscillator according to the sensory feedbacks mentioned above. Under the conditions of Table I, this simulation is performed. The blue solid line and dashed led line are the outputs of the neural oscillator and the sensory input, respectively. If the gain k is properly set with an appropriate natural frequency, the output generated in terms of the neural oscillator shows the fully entrained signal, as seen in (b) and (d) of Figure 5, in contrast to (a) and (c) of Figure 5.
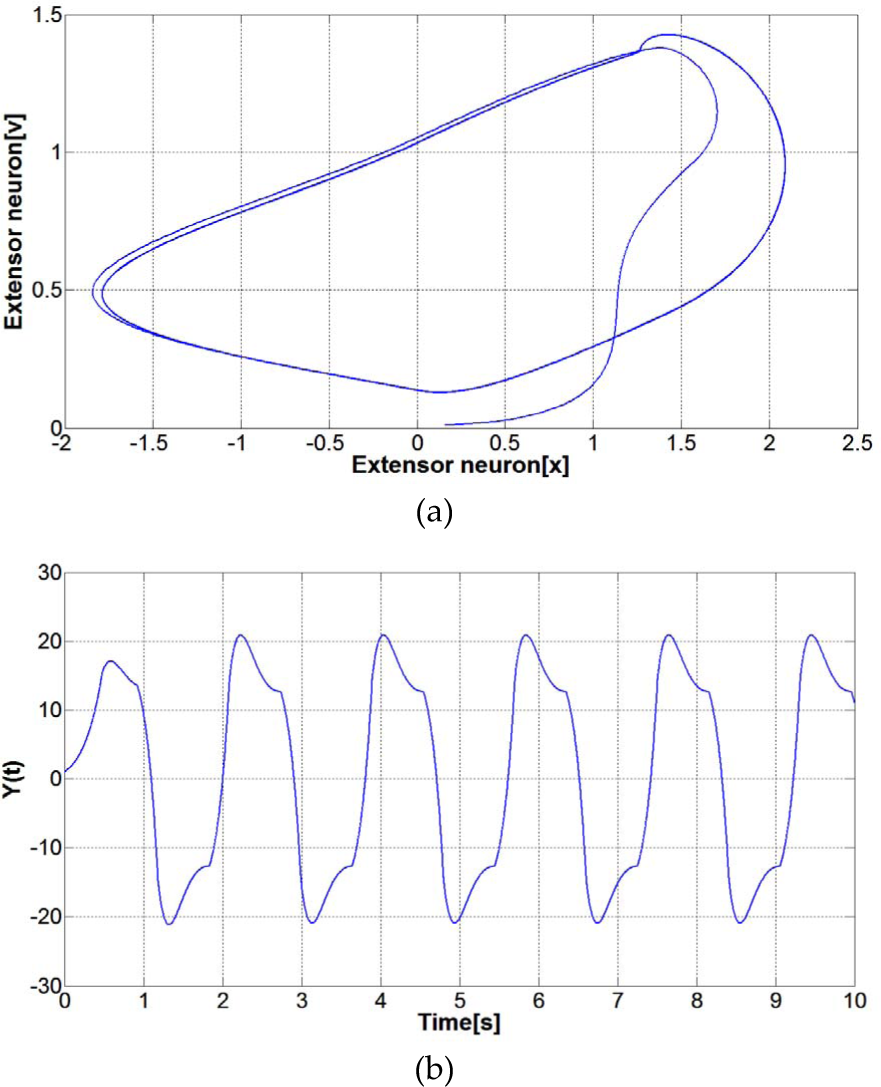
Plots for analysis of the oscillator dynamics set with Table 1; phase plane of the extensor neuron (a) and the total output of the neural oscillator (b)

Plots for analysis with respect to entrainment of the neural dynamics set with Table 1; the amplitude of (a) and (b) is the same and the input natural frequencies are set with 0.5 Hz and 2 Hz, respectively. In (c) and (d), the amplitude of the sensory input is set as 1.5 and 3.5, respectively, with the identical natural frequency.
3.2 Robotic arm control
Given an n-DOF robotic arm as shown in Figure 3, the endpoint position of the robotic arm is generally described as a vector

where
Here, the mathematical description of the proposed control approach is clearly illustrated. In addition to control inputs in Cartesian space corresponding to the virtual forces (spring and damper), a control scheme for regulating each joint velocity is adopted, as follows:

where Δ

where
4. Dynamic motion analysis of three-link planar arm coupled to neural oscillator
Dynamic simulations of a planar three-linkage arm robot for different tasks are performed for validation purposes. The kinematic configurations and mechanical attributes of the robot system are given in Figure 6 and Table 1.

Three-link planar arm model (see Table 1) coupled with neural oscillators
Parameters of the neural oscillators with robot arm model

For the neural oscillators of each joint, the self-excitatory condition is applied to two intersegmental joints and the VFI-coupled condition to the end effector. VFI coupling involves motion tracking and inhibitory conditions that deal with the contact forces when the end effector happens to hit a moving wall. The control gains, i.e., the tonic input s and the time constant Tr/Ta, the synaptic weight w, and the adaptation constant b for the neural oscillators are determined such that the sustained self-oscillation conditions by Matsuoka [6,7] are satisfied. The control gains are given in Table 1.
Three tasks - target-reaching, path-tracking without contact, and path-tracking with contact - were performed by the arm robot. Two control cases of the VFI control alone and coupled to the neural oscillator were compared. Specifically, whether or not the proposed control scheme brought about complementary characteristics from the perspective of biologically inspired robotic motion was investigated.
4.1 Case I: Target-reaching task
This task was to check if the VFI could help improve the accuracy in target reaching. The target point was set to (1.7, 0.1) in Cartesian coordinates. The end effector of the arm robot was controlled to reach a target position. While the neural oscillator exposed inaccuracy in the target-reaching task, the proposed VFI control achieved accuracy whether coupled with the neural oscillator (Figure 7a) or not (Figure 7b). Comparing the two cases with and without the oscillators, the end-effector of the robotic arm controlled by coupled neural oscillators with VFI reached the given point accurately, and moved smoothly from the initial point to the target point.
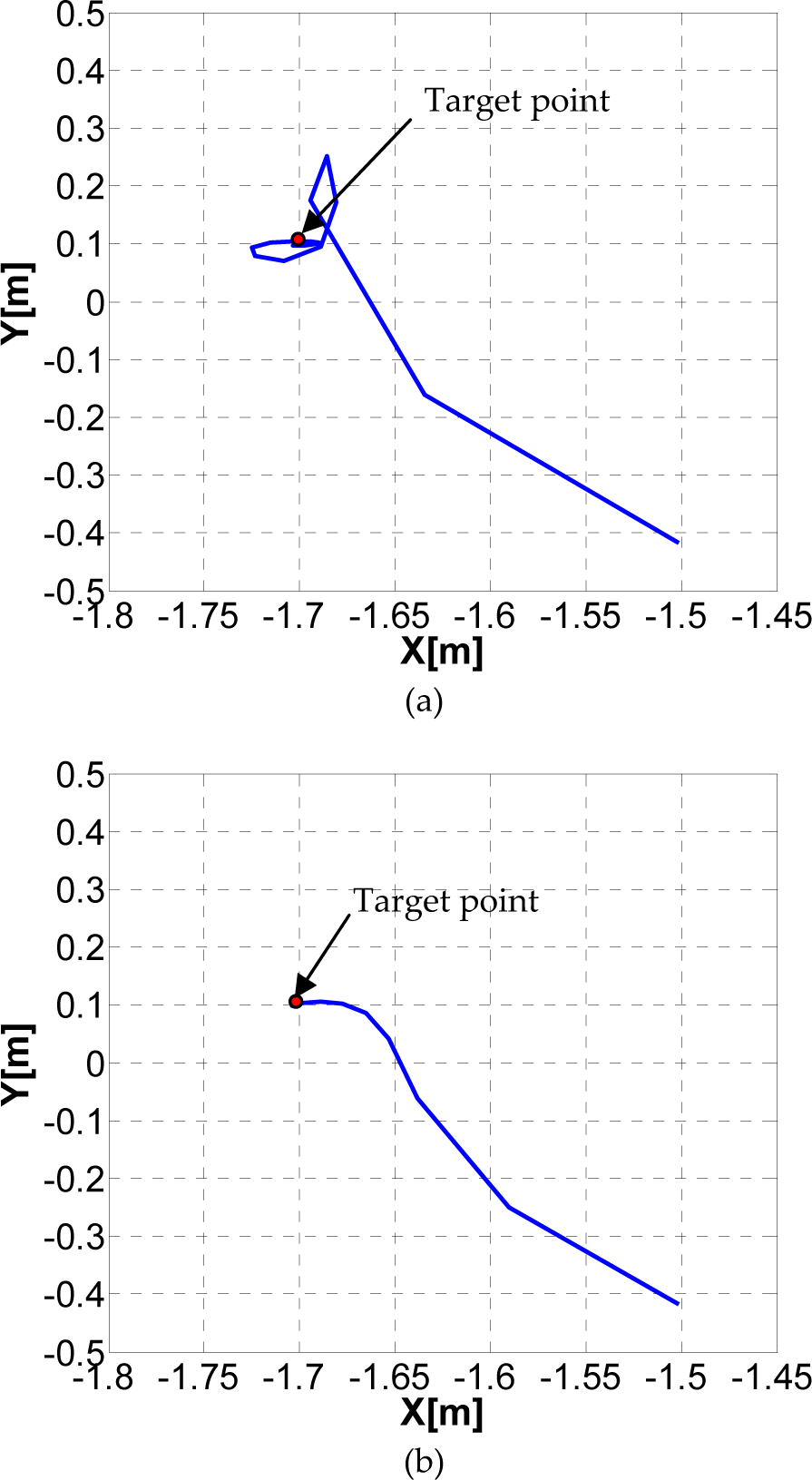
The trajectory drawn by the end-effector of the robot arm without coupling to the neural oscillator (a) and with coupling to the neural oscillator (b)
4.2 Case II: Path-tracking task
The end effector of the arm robot was controlled to track a circular motion. The simulation results of three control cases are presented and compared. The first case was controlled by the VFI only, the second case by the VFI coupled to the neural oscillator without inter-joint communication, and the last by the VFI coupled to the enhanced neural oscillator with inter-joint communication. The output motions and joint trajectories are presented in Figures 8 and 9, respectively. While the first case fails to show repeatability, the others do, thanks to the entrainment property of the neural oscillators in relation to the joint angles. We use the neural oscillators independently in the simulation shown in Figure 8 (b); the better result in the circle motion shown in Figure 8 (c) is caused by efficiently connecting the neural oscillators both in repeatability and tracking accuracy.
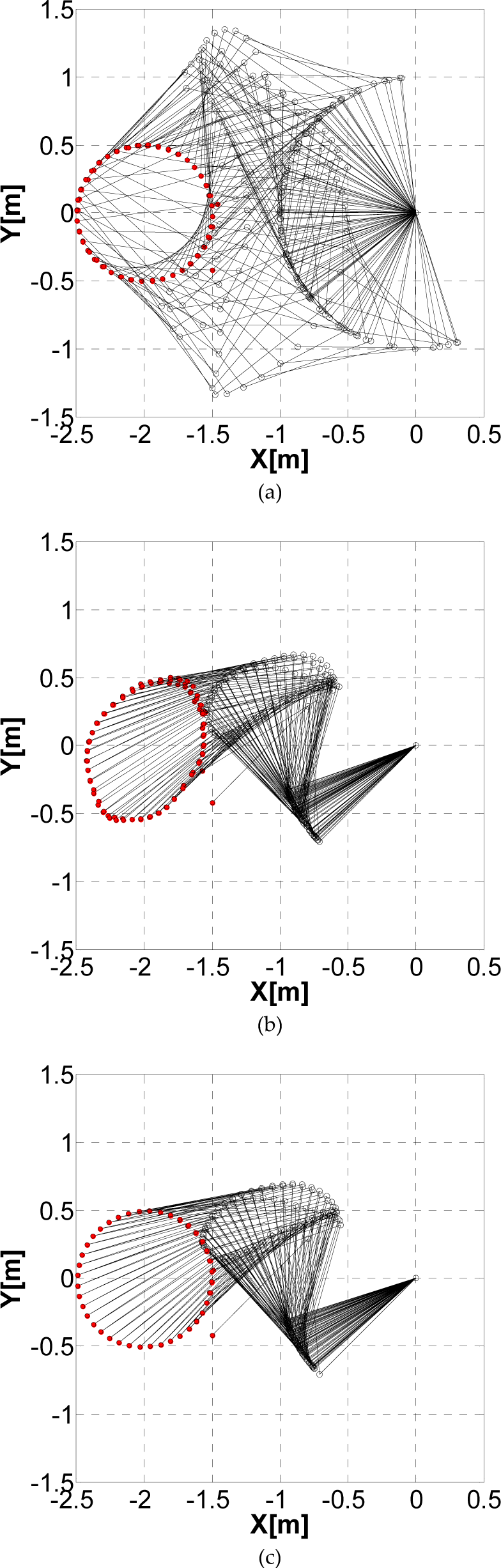
The trajectory drawn by the end-effector of the robot arm without coupling to the neural oscillator (a) and with coupling to the neural oscillator, (b), (c).

The joint angle trajectories actuated by the neural oscillator and the output of the neural oscillators. In the graphs, the thin line is the first joint angle, the dashed line is the second joint angle and the third joint angle is drawn by the thick line.
4.3 Case III: Path-tracking task with unknown contact
In this task the adaptability of the arm robot in presence of unexpected contact forces was tested. The contact between the arm robot and a moving wall was modelled with a unilateral spring-damper. For the VFI without the neural oscillator the end effector bounced on the wall in the middle of contact, and even failed to track the circular path right after contact (Figure 10a). Meanwhile, the VFI controller coupled to the neural oscillator kept the arm robot in steady contact with the wall, so as to minimize the tracking error of a circular path (Figure 10b).
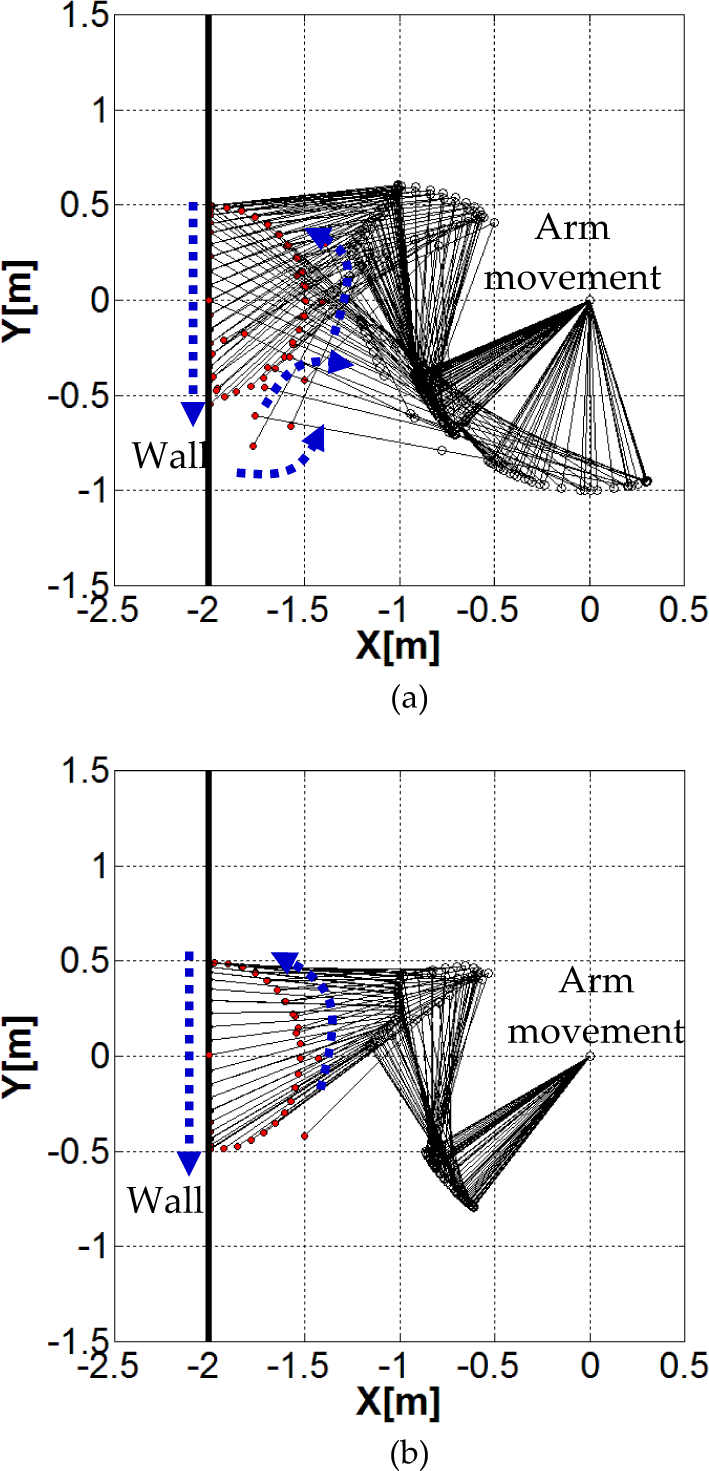
Snapshots of the robot arm controlled by the VFI (a) without coupling to the neural oscillator and (b) with coupling to the neural oscillator
5. Discussion
Even though the proposed control approach shows novel performances as an alternative for control of a redundant robotic arm, it is generally hard to employ and analyse the coupled dynamic system, since the neural oscillator is inherently a non-linear system with many parameters that need to be tuned. Thus, various tuning approaches have been tried, such as graphical analysis [14], optimization [18] and a manual tuning method [20,21]. However, even in helpful contributions by related preliminary works, it is difficult to understand the effects corresponding to changes of the parameters of the VFI-based control approach. Hence, in this section, the changes of the robotic system behaviours in response to different control gains of the proposed control method are investigated.
In (a) and (b) of Figure 11, the parameters with respect to the stiffness k p and damper k d of the virtual model are changed. k p is increased from 200 to 1000 when k d is fixed as the constant 20. It is noted that the rising and settling time decrease as k p increases. Figure 12 gives a similar insight with regard to parameter changes as the Figure 11. k d encourages reduction in oscillation of the trajectory followed to the target point. This is observed from the resultant plots induced with increasing k d even though the rise time is increased.

The time-histories of the end-effector positions of the robot arm controlled by the VFI coupled to the neural oscillator with different k p : (a) x coordinates and (b) y coordinates

The time-histories of the end-effector of the robot arm controlled by the VFI coupled to the neural oscillator with different k d : (a) x coordinates and (b) y coordinates
In VFI-based control including the neural oscillator, the neural oscillators and their network may interrupt to achieve a desired motion, although the proposed coupled system is helpful in motion generation and adaptive robot behaviour in redundancy of DOFs, keeping the repeatability. Such is one of the critical problems in control for robot manipulation. Figure 13 illustrates that the trajectory of the circular motion drawn by the robotic arm is distorted when the gains of the neural oscillator are set inadequately. This is caused by an inappropriate set of sensory gains as described in Table I, even though the remainder of the parameters of Table I may be tuned well. For comparison, Figure 8(b) shows a case where all gains corresponding to the virtual model and neural oscillators were selected improperly.

(a) The trajectories of end effector and (b) time histories of joint angles of the robot arm that are controlled by the neural oscillator. The sensory gains k1, k2 and k3 of the neural oscillator are set to 25, 20 and 15.
In Eq. (5), the outputs of the neural oscillators were fed back to the command for robot control. The performance of their tracking motion is primarily determined in terms of k o and c o . This simulation was performed under the condition of the parameter set within the range of 2.1 to 52.5. Figure 14 illustrates the behaviours of the robotic arm when point-to-point reaching and circular motion are given as the desired motion. As seen in (b) and (c) of Figure 14, the second neural oscillator coupled to joint 2 brings about an observable error according to the difference of the gain k o . In comparison with this result, the end-effector of the coupled robotic arm traces the given paths well, irrespective of the change in the gains ko1 and ko2, as shown in (a), (d) and (c), (f) of Figure 14. This means that although the virtual model drives the arm to move along the given trajectory, the resultant motion depends on the outputs generated by the neural oscillators. In particular, it is noted that the neural oscillator coupled to the specific joint may engender an uneven motion.

Trajectories drawn by the end-effector of the robot arm with coupling to the neural oscillator, with increasing neural oscillator control gains ko1, ko2 and ko3 and without change in other gains. Where all of ko1, ko2 and ko3 are changed, the plots indicate the point-to-point reaching (a), (b) and (c) and circular motion (d), (e) and (f), respectively.
The proposed VFI-based control method was then implemented in a real 7-DOF robotic arm to verify whether or not it is possible to yield a desired movement and adapt to unknown external forces while maintaining the repeatability of individual joint motion. When controlling a multi-DOF robotic system, if only VFI-based control is applied without using the neural oscillators, the repeatability problem for each joint is incurred, as shown in Figure 15(a) in contrast with Figure 15(b). Despite the same circular motion being performed in both experiments, the motion in Figure 15(a), in which the neural oscillator is not considered, did not follow the circular motion given. As shown in Figure 15(b), the coupled robotic arm yields an impressive capability for self-adapting motions with unknown disturbance; ill-posedness of inverse kinematics due to the redundant degrees of freedom (DOFs) such as a 7-DOF robotic arm is also solved, while the motion repeatability of the joints is maintained. In addition, Figures 15 and 16 illustrate compliant responses, carrying out the objectives given to the 7-DOF robotic arm even under unknown disturbances. The red arrow denotes the direction of an external applied force. From these results, it is confirmed that the neural oscillator enables the coupled joint to exhibit a biologically inspired motion to enhance the adaptive property sustaining motion stability.

Snapshots of the experimental results for the 7-DOF robotic arm with respect to the circular motion when sensory feedback of the neural oscillators was turned off (a) and on (b)

Trajectory of the end-effector of the 7-DOF robotic arm with respect to the given circular motion under unknown disturbances forces in the experiment
6. Conclusion
This paper has proposed a control scheme for technically achieving biologically inspired robotic motion even in redundant robotic systems. The proposed control approach basically consists of the neural oscillator and the virtual force inducer (a spring and a damper). In contrast to existing works, which only enabled rhythmic pattern generation, our approach allows the robot arm to trace a trajectory correctly through entrainment. To achieve this, we exploit virtual components to easily carry out given tasks without calculating inverse dynamics, overcomes the ill-posedness problem of redundant systems. The neural oscillator coupled with each joint of a robot arm also contributes to sustaining repeatability and naturally setting kinematic configurations of a robotic arm with redundancy. Simulation results have shown the effectiveness of the proposed approach and how to tune the parameters of the neural oscillators. Moreover, it has been demonstrated experimentally that the robot arm can adapt to respond to environmental changes.
7. Acknowledgements
The present research was conducted with a research grant from Kwangwoon University in 2013.