
Abstract
This paper presents a problem of fault detection and isolation (FDI) in mechatronic systems described by nonlinear dynamic models with such types of no differentiable nonlinearities as saturation, Coulomb friction, backlash, and hysteresis. To solve this problem, so-called logic-dynamic approach is suggested. This approach consists of three main steps: replacing the initial nonlinear system by certain linear logic-dynamic system, obtaining the bank of linear logic-dynamic observers, and transforming these observes into the nonlinear ones. Logic-dynamic approach allows one to use the linear FDI methods for diagnosis in nonlinear mechatronic systems.
Introduction and Problem Statements
The problem of fault detection and isolation (FDI) was extensively investigated for the past 20 years; see, e.g., the surveys (Frank, M., 1990; Gertler, J., 1993; Patton, R., 1994; Isermann, R. & Balle, P., 1996), the books (Patton, R. & Frank, P., 2000; Chiang, L. et al, 2001; Blanke, M. et al, 2003). Many problems have been studied and solved: different methods of residual generation and relationships among them, robustness, adaptive threshold test, H∞ approach, fuzzy logic, descriptor systems, different classes of nonlinear systems, inequality constraints, geometric approach and so on. Many practical examples were considered; in particular, special book was devoted to mechatronic systems (Caccavale, F. & Villiani, L., 2002).
The main purpose of this paper is to consider the FDI problem for wide class of mechatronic systems. As a rule, these systems are nonlinear essentially with such types of no differentiable nonlinearities as saturation, Coulomb friction, backlash, and hysteresis. Therefore one has to use nonlinear methods of the FDI. However, most of papers dealing with the FDI problem consider the nonlinear systems with differential nonlinearities (Seliger, R. & Frank, P., 1991; Shields, D., 1996; Staroswiecki, M. & Comtet-Varga, M., 1999; De Persis, C. & Isidori, A., 2001) therefore they cannot be used in our case.
There are several papers developed the algebraic approach to the FDI problem and intended for systems with no differentiable nonlinearities (Zhirabok, A. & Shumsky A., 1987; Zhirabok, A. & Preobrazhenskaya, O., 1994; Zhirabok, A., 1997). However, they require rather complex analytical transformations therefore it is difficult to use them in practice. This paper is intended to overcome these difficulties and develop an approach allowing one to solve the FDI problem for a wide class of mechatronic systems. So-called logic-dynamic approach is suggested to obtain the simple FDI procedure in systems with no differentiable nonlinearities.
This paper is a logical sequel of (Filaretov, V. et al 1999, 2003) where the FDI problem in robots in operation was studied. The FDI process in (Filaretov, V. et al 1999) was provided by the bank of observers. It was shown that the observer-based approach does not allow one to distinguish some faults even though all elements of the state vector are measured. To overcome this difficulty, the parity space approach was used in (Filaretov, V. et al 2003), which allowed one to distinguish these faults. It is well-known (Gertler, J., 1993) that in the linear case the observer-based approach and the parity space one are equivalent. It was shown in (Filaretov, V. et al 2003) that there are nonlinear systems for which the parity equations cannot be obtained. At the same time, the observer-based approach can be used in this case. Therefore, in the nonlinear case, these approaches are not equivalent and must be used in combination for fault diagnosis in complex technical systems.
The paper is organized as follows. Section 2 describes the main models under consideration. Section 3 is devoted to the logic-dynamic approach. Firstly, the main steps of this approach are given. Then the first and second steps are described in detail. In Section 4, four conditions of the observer existence are obtained. Section 5 is devoted to the observer design, and the third step of the suggested approach is described. In Section 6, the problem of stability is discussed. Modifications of the logic-dynamic approach are suggested in Section 7. An example is considered in Section 8. Section 9 concludes the paper.
Basic Models
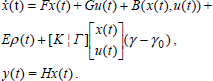
In this paper, the logic-dynamic approach is developed for a class of nonlinear systems described by the equations

Here x, y, and u are the vectors of state, output, and control; γ is the function presenting the faults; F(γ), G(γ), and B(x,u) are matrix functions; H and E are known matrices of appropriate dimensions. The term Eρ(t) models unknown parameters and unknown inputs to the actuator and to the dynamic process; the evaluation of the vector function ρ(t) must generally be considered unknown. It is supposed also that if there are no faults, then γ(t) = γ0; if a fault occurs, γ(t) becomes an unknown function. Notice that the case when the function B(x,u) has the form B(y,u) was considered in (Frank, P., 1990).
Write down the approximate equalities

Denote system (1) with F = F(γy0) and G = G(γ0) as ∑ = (F,B,G,H)
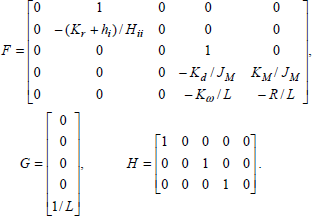
As a practical example, consider the general electric servoactuator of manipulation robots studied in (Filaretov, V. et al 1999, 2003). The servoactuator dynamic, with the backlash and elasticity taken into account, may be described by the following nonlinear equations:

Here x1 and x2 are the output rotation angle and velocity at the reducer output shaft, respectively; x3 and x4 are the output rotation angle and velocity at the motor output shaft, respectively; x5 is the current through the servoactuator windings; Hii and hi are the components of the inertia and velocity, respectively: Md and Mr are the moments of the Coulomb friction at the motor and reducer shaft output, respectively: Md = Mdosign(x4), Mr = Mrosign(x2); K
d
and K
r
are the respective coefficient of viscous friction of the motor and reducer output shaft; i
r
is the reducing ratio of the reducer; C
r
is the rigidity coefficient of the mechanical reducer; J
M
is the moment of inertia of the electric servoactuator and of the rotating parts of the reducer; Kω and K
M
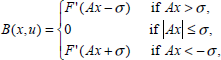
are the respective coefficients of the counter EMF and of the torque; R and L are the active and inductive resistances of the electric servoactuator windings, respectively; the function

2σ is the backlash span,
The logic-dynamic approach to solve the FDI problem for system (1) includes the following steps (Zhirabok, A. & Usoltsev S., 2002).
Replacing the initial nonlinear system (1) by so-called linear logic-dynamic (LLD) system containing several linear subsystems and linear logical conditions. Solving the FDI problem for the LLD system and obtaining the bank of the LLD observers. Transforming the LLD observers into the nonlinear ones.
For detail description of the logic-dynamic approach, consider the simple case with single nonlinearly (Coulomb friction) of the form

On the first step of this approach, replace the system ∑ = (F,B,G,H), by certain LLD system. This system consists of three linear subsystems





Structure of logic-dynamic system
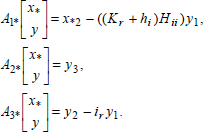
On the second step, a bank of the LLD observers has to be obtained. Assume that a structure of the LLD observer is similar to the one shown in Fig. 1, therefore three subsystems ∑*1,∑*2,∑*3 and the row matrix A* exist such that the following relationships hold:
if A*x*(t) < 0, then the LLD observer reduces to ∑*1:
if A*x*(t) = 0, then ∑*2:
if A*x*(t) > 0 then ∑*3:




It is well-known from the linear FDI theory (Frank, P., 1990; Gertler, J., 1993; Patton R., 1994; Zhirabok, A., 1997) that for the observer design, the matrix Φ such that


To ensure the reliable fault detection, the residual r(t) has to be sensitive to the faults and invariant with respect to the unknown inputs ρ(t) that is

To fit the logical conditions in the initial LLD system to the ones in the LLD observer, assume that the following relationships hold in the unfaulty case:

Since x*(t)=Φx(t), i.e. A*x*(t)=AΦx(t), then these relationships hold if

This condition imposes an additional restriction on the matrix Φ.
Preliminary rezults
To design an observer in the linear case, there are a number of approaches, e.g., the eigenstructure assignment (Patton R., 1994), the approach based on the Kronecker canonical form (Frank, P., 1990). Consider another linear procedure suggested in (Mironovsky, L., 1979; Zhirabok, A., 1997) also based on the Kronecker canonical form that allows one to take into account condition (6) easily.
It is well-known (Kwakernaak, H. & Sivan, R., 1972) that the matrices F* and H* describing the observer can be represented in a canonical form with the matrices
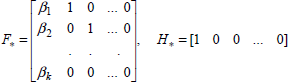
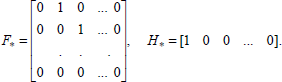
This can be arranged by removing the feedback coefficients β1, β2, …, β k and transforming the matrix J*. This transformation allows one to obtain a simple algorithm of the observer design.
Let E* be a matrix of maximal rank satisfying the equality E*E = 0 . It follows from this definition that expression ΦE = 0 can be rewritten as Φ = NE* for some matrix N.
There are several conditions of existence the observer invariant with respect to ρ(t).
Consider the first equation in (4)


If condition (9) does not hold, the observer invariant with respect to ρ(t) cannot be built.
Consider the second equation in (4)

As above, this equation is equivalent to the rank condition


It follows from definition of the matrix E* that the last equation is equivalent to the equation

If condition (10) does not hold, the observer invariant with respect to ρ(t) cannot be built.
Consider the matrices

This inequality may be named as concordance condition of equations (8) and (10). If condition (13) does not hold, the observer cannot be built.
The last condition follows from nonlinear feature of system (1). As it shown above,
If this condition does not hold, a nonlinear observer corresponding to the system in the form (1) and invariant with respect to ρ(t) cannot be built.
Preliminary results
If one of conditions (9), (11), and (14) does not hold, the observer invariant with respect to ρ(t) cannot be built. In this case one has to use the robust methods, which allows one to minimize the influence of ρ(t) on r(t) (see Low, X. at al, 1984; Frank, P., 1990).
Assume that conditions (9), (11), (13), and (14) hold. Using matrices in (7), one can obtain from (4) with C = QC0 the following equations:

Consider the second equation in (15) with i=1 and replace the matrix Φ1 by RC0H:

Multiple this equation by F and replace the product Φ2F by

Eventually one can obtain the single equation

This equation is a basis of the suggested algorithm to design the observer, i.e. to find the matrices Q, J*1, J*2,…, J*k, G*, G*, and A*.
Let k=1.
If equation (16) holds for some row matrices Q, J*1, J*2,…, J*k (this can be checked using the mathematical packages, e.g. MATLAB), go to 4.
Let k=k+1; if k≤n, go to 2, otherwise the observer satisfying condition (5) and (6) cannot be built.
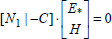
Obtain the rows of the matrix
Let
Notice that the matrix Q can be specified in some cases.
On the third step of the suggested approach, it is necessary to transform the obtained LLD observer into the nonlinear one. Recall that to obtain the LLD system, the initial nonlinear system is replaced by three linear subsystems ∑1, ∑2, ∑3 and two logical conditions Ax(t) ≥ 0 and Ax(t) < 0 obtained by removing the nonlinear term


To obtain a stable matrix F* in equation (4), it is necessary to use a feedback in the observer and to correct the matrix J* correspondingly. Namely, if β1, β2, …, β
k
are the feedback coefficients providing the necessary stability of this matrix, then the i-th row J*i of the matrix J* has to be replaced by the row

Since CH = Φ1, it is easy to obtain the second term in (15) from this expression; the same is true for i=k. Therefore, the matrix Φ obtained from Algorithm is left unchanged under that change in the matrix F*. Thus, the problems of the observer invariance with respect to ρ(t) and stability of the matrix F* can be solved independently of each other.
The transformation of the LLD observer into the nonlinear one can change stability of the observer. In this case, to obtain the asymptotically stable observer, equation (17) describing the observer has to be supplemented by the term

Modifications of Suggested Approach
Some extensions
As it follows from the logic-dynamic approach, the matrix G' in (2) can be replaced by the matrix function G' (u, γ) or G (u, y, γ); in this case the additional term in (17) is of the form
If there exist several nonlinearities in system (1) with matrices

The logical conditions in the LLD observers

In this case, condition (6) must be replaced by the one

Besides, condition (14) is relaxed in this case and is of the form

However, it becomes necessary condition only for the following reason. Suppose that each row in the matrix A is a linear combination of the matrices E* and H rows. However, from this it does not follow that they are linear combinations of the matrices Φ = NE* and H rows. Therefore, if equality (20) holds, condition (19) must be checked. If condition (20) does not hold, the observer invariant with respect to ρ(t) cannot be built.
It is known that for the system described by the difference equations

The suggested approach has been described in Sections 2 and 3 to fit a task of fault detection. It can be easily to transform it for fault isolation. Actually, consider the following form of model (1):


A demand of sensitivity to the rest faults yields the set of inequalities:

The numbers
In this case, r(t) is a vector of residuals; decision making has to be performed on the basis of the matrix D. The matrix
Consider another type of nonlinearity – a backlash described by the model

To overcome this difficult, assume that the model of observer contains the term analogous to

Matrices Φ and A* are determined from Algorithm therefore the second equation in (4) holds for the system


Therefore, the task is reduced to that considered in Section 3 with restriction (6).
Two another types of no differentiable nonlinearities (saturation and hysteresis) can be considered by analogy, and they give analogous results. Moreover, the suggested approach can be used for another types of nonlinearities such as G' u(t)sin(Ax), G' u(t)cos(Ax), G' u(t)log(Ax) and so on. Actually, consider the term G' u(t)sign(Ax) and
Example
Consider the general electric servoactuator of manipulation robots with dynamics described in Section 2. Assume that

The corresponding LLD system is described by the following matrices:
Assume that faults and unknown inputs are described as follows:

Because of several types of nonlinearities, the term B(x,u) in (2) is in the form


Perform the necessary calculations. It follows from E*E=0 that

Because


Since
It follows from (8) that
Since




Because
Obtain the description of the linear observer. Since


Because



For simulating, consider the manipulator shown in Fig. 2; numerical values of the parameters are the following: K r = 0.01 Nms, K d = 10−5 Mms, C r = 2.0 Nm, i r = 100, σ = 1.0 rad, Mr0 = 10.0 Nmrad, Md0 = 0.15 Nmrad, Kω = 0.02 Vs/rad, K M = 0.02 Nmrad/A, J M = 10−4 kgm2, L=0.004 H, R=0.4 Ω.

Manipulation robot
Consider the case when x1 = q1 and let H11 = 10, h1 = 15, ρ(t) = 0.1 · sin(10 · t). In the simulation, the initial states of the system under consideration and the observer are assumed to be equal to zero. The control value is u=const=10. Fig. 3 illustrates the residual behavior under the fault when the parameter Mr0 changes from 10.0 to 12.0 at once at t=300. Fig. 4 illustrates the residual behavior under the case when the parameter Mr0 changes from 10.0 to 12.0 at once at t=300 and the term ρ1(t) = 0.001 · sin(t) (unknown inputs) is added to the right-hand side of the equation for x1 in addition to the term ρ(t) = 0.1·sin(t) in the right-hand side of the equation for x4. It is clearly seen from Figs. 3 and 4 that the residual is sensitive to ρ1(t) and to the fault and is invariant with respect to ρ(t).

Residual behavior under the fault

Residual behavior under the fault and unknown inputs ρ1(t)
The problem of the observer-based fault diagnosis in nonlinear mechatronic systems with no differentiable nonlinearities has been studied. To solve this problem, so-called logic-dynamic approach has been developed.
This approach consists of the following main steps: replacing the initial nonlinear system by certain linear logic-dynamic system, obtaining the bank of linear logic-dynamic observers, and transforming them into the nonlinear ones. It has been shown that this approach allows one to take into account different types of nonlinearities by linear methods. Four existence conditions to design the observer invariant with respect to the unknown parameters and unknown inputs have been obtained. The example of fault diagnosis in manipulation robot has been considered.
Footnotes
Acknowledgments
This work was supported by Russian Foundation of Basic Researches.