
Abstract
This paper proposes a roadmap for the application of advanced technology (in particular robotics) for the humanitarian demining domain. Based on this roadmap, a portable demining kit to handle urgent situations in remote locations is described. A low-cost four-wheel steering robot with a biologically inspired locomotion control is the base of the kit. On going research on a method for all-terrain piloting, under the morphological computation paradigm is also introduced, along with the behavioural architecture underlying it, the Survival Kit. A multi-agent architecture, the DSAAR architecture, is also proposed as a way of promoting short time-to-market and soft integration of different robots in a given mission. A common denominator for all developments is the quest for sustainability with respect to (re-)engineering and maintainability effort, as well as economical and ecological impact. Failing to cope with these requirements greatly reduces the applicability of a given technology to the humanitarian demining domain. Finally it is concluded that biologically inspired design fits considerably well to support a sustainable demining paradigm.
Keywords
Introduction
Humanitarian demining has been considered by many as a privileged field for advanced technology (Carruthers, A. et al., 1999; UWA, 1998; GICHD, 2002b). The main reason behind this feeling is the need for a considerable risk reduction for human life, in addition to economical and social advantages of speeding up the demining process.
This rationale triggered a considerable amount of research in robotics applied to the domain, including area coverage planning (Acar, et al., 2003) and multi-robot systems. (Long, M. et al., 2005), ground vehicles (Nicoud, J. & Habib, M., 1995; Doroftei, D. et al., 2006; Cruz, H. et al., 2005), unmanned aerial vehicles (Eisl, M. M. & Khalili, M., 2003; Santana, P. F. & Barata, J., 2005b), among others. However, the domain was rarely considered in its whole spectrum. In most studies and developments, the fact that robots will work in very poor countries and usually in very harsh environments, by poorly educated operators, is usually disregarded. However, as it will be shown, the humanitarian demining community has already realised that a new approach is required. For this reason, people are abandoning the use of « humanitarian demining » as a broader expression, and replacing it by « Mine Action », which considers the demining process as part of a bigger picture, where the socio-economic aspects of the process are also taken into account. Therefore, in addition to behavioural autonomy (the usual attractor for roboticists in general) it is also paramount to consider energetic sustainability and long-lasting capabilities of the robots.
In 2003, the Portuguese SME IntRoSys, in a partnership with the New University of Lisbon and LabMAg research centre of the University of Lisbon, recognised the business and scientific opportunity emerging from the unavailability of sustainable robotic systems applicable to the mine action domain. Since then, these three institutions have been working on a robotic system capable of handling the requirements of this particularly demanding domain. This paper surveys part of the work developed so far.
The document is organised as follows: the mine action problem is presented in section 2; then, a roadmap for the application of technology to the humanitarian demining domain is proposed in section 3; section 4 proposes a business model in which the robotic system could also be applied to other domains; next, in section 5, a compliant robot for harsh environments is presented, which is then followed by a description of its locomotion control method in section 6, its all-terrain piloting method in section 7, and underlying behavioural architecture in section 8; the DSAAR architecture and field trials are then presented in sections 9 and 10 respectively; finally, some conclusions and future work directions are presented.
Problem Definition
This section is based on the roadmap for the development of advanced technology applied to mine action, with special focus on robotics, proposed in (Santana et al, 2005a).
Developing countries require a sustainable approach to the mine action problem; in fact, the mine action community shifted from a number-based approach to an impact-based approach (SAFELANE, 1999), targeting the local priorities (Cornelis, J. & Sahli, H., 2003). This means that the success of a demining campaign is not measured by the quantity of demined land but whether its output is effectively useful for the community (GICHD, 2002a), as there are other problems besides landmines, such as, social, medical, economical. In order to carefully identify opportunities, the mine action problem is analysed in a three-dimensional framework: temporal, geographical, and economical.
Temporal Component
The temporal component refers to the different phases of a typical mine action process, which are (GICHD, 2002a): (1) conflict and immediate post-conflict (humanitarian emergency); (2) post-conflict (reconstruction); and (3) development (development assistance).
The different characteristics of each phase usually require different approaches. In the first phase, international community is usually impelled to contribute strongly, empowering high-tech applications. In the second phase, for the reconstruction of certain high value facilities, such as primary roads, there should be enough incentives to recur to high-cost novel solutions. In long-term phases however, typically low cost, simple, and locally available resources for demining are the most demanded ones.
Geographical Component
The geographical component can be categorised as follows:
The characteristics of the environment where a given demining campaign will be carried out, such as typical vegetation, soil, temperature, etc., are also important aspects to be taken into account in the geographical component (GICHD, 2002b).
Economical Component
Market studies (e.g. (Newnham, P. & Daniels, D., 2001)) have been performed, and many of these studies concluded that the market of humanitarian demining is not active and wide; as a result, the product's development usually requires direct or full funding (Newnham, P. & Daniels, D., 2001). On the other hand, economical interests in third world affected countries (e.g. oil wells accesses clearance) are enough to trigger the procurement of advanced technology capable of providing fast and secure demining.
Technology Development Roadmap
This section introduces a set of recommendations for the development of technology (with special focus on robotics) for the mine action domain, which could be used to increase the confidence level of technology acceptance in the minefield.
Previous work has identified opportunities (Carruthers, A. et al, 1999; UWA, 1998; GICHD, 2002b) and guidelines for the development (UNMAS, 2003b) and procurement (UNMAS, 2003a) of technology applicable to the mine action domain.
Close-in detection and area reduction are usually seen as priority domains with very significant benefits for demonstrating progress on R & D (UNMAS, 2003a; UNMAS, 2003b). Based on this conclusion, the following analysis focus mainly on these two application domains.
Cost and Complexity
Usually high-tech means high-cost and high-complexity, which is a draw-back when it has to be applied in a domain where people have little formal education, the danger of damaging equipment is high and the sites are remote and hazardous, hindering easy maintenance and repair. Local equipment has the advantage of being low-cost, readily available, easily maintained or repaired; in fact, this equipment exists and is widely used (Smith, A., 2003), stimulating local economy.
Hence, one should target tasks in the humanitarian demining domain where the advantages of a new technology overcome the drawbacks associated with its cost and complexity.
Conclusion 1
The focus should be on the part of the mine action process where robotics provides added-value; i.e., where cost and complexity are minor factors in the overall assessment.
For instance, it is known that mechanical demining does not cope with the humanitarian demining safety and accuracy requirements, damages the soils, is logistically difficult, and expensive (UWA, 2000; Habib, M. K., 2002a). However, its application is growing in area reduction, terrain preparation, and post-clearance tasks (GICHD, 2004). It is useful until better technologies are developed (Habib, M. K., 2002b).
Conclusion 2
Current trends show, to a certain extent, that area reduction is more receptive to high-cost technologies than close-in detection.
Risk Assessment
Despite all R&D efforts and improvements in multisensor fusion with all its advantages (e.g. false positives reduction), the real truth is that the detection and clearance process remains unsatisfactorily robust (Cornelis, J. & Sahli, H., 2003). In addition to these more related technological limitations, personnel on the field are conservative regarding these innovations.
Due to these two factors, metal detectors and the man with a probe continue to be the current practices, since they are believed and perceived to be highly procedural and conservative approaches.
On the other hand, tasks associated with the survey phases are mostly of risk assessment, and consequently probabilistic. In these cases, the more information available the better will be. Thus, even though a novel product may not be able to provide a 100% sure output, as required for the detection of landmines, it can be used as another knowledge source feeding the decision making process during a survey phase.
Conclusion 3
The focus should be mainly in parts of the Mine Action process where risk assessment is a common practice.
Product's Life Cycle
As aforementioned, the mine action market is not significantly active and wide; it is not a regular market since usually end-users are not the buyers, instead donors are. Hence, a conventional product's life-cycle and return of investment strategy is often hard to achieve.
Conclusion 4
The product's development should be (at least) partially funded. In order to guarantee return of investment, technology transfer should be attainable.
Close-In vs. Area Reduction
Area reduction is preceded by an impact study that selects potential minefields and prioritises the actions in terms of a set of socio-economic factors. Therefore, a set of assumptions about cleared land have already been made, which could be modelled with probabilities. Area reduction can be performed using machines, dogs, and other methods that do not meet the more stringent manual demining requirements. Thus, it can be stated that area reduction has tacitly the concept of probabilistic risk assessment embedded in its procedures.
Conclusion 5
Area reduction, by its own nature and current practices, is a probabilistic process.
On the other hand, as it was mentioned in section 3.2, close-in detection is much stricter in its procedures and requirements.
Conclusion 6
Close-in detection tends to be a deterministic task, which is achieved by systematic and conservative (pessimistic) approaches.
A « Business Model »
From the previously set of conclusions, it can be derived that area reduction activities are more prone to accept advanced technology.
Taking into consideration conclusion 4 (product's life cycle) it can be concluded that technology transfer should be favoured as much as possible. If area reduction is considered as an instance of a
A Portable Emergency Demining Kit
The remainder of the paper is about the developments concerning a generic remote monitoring toolkit and a specific portable kit for rapid intervention in humanitarian demining emergencies.
The idea is to have a low-cost, light, and simple maintenance robot fleet available in some hot spots within the affected countries. Each time an accident is reported, one operator and one robot are deployed to the affected area. Being small and light, the robot can be carried in a common all-terrain vehicle.
Once on site, the operator can perform area reduction in order to, for instance, provide some information about the terrain's state, delegating to others the full demining process. This can be extremely important as the field must be prioritised before being demined, and especially because locals may risk using the affected fields for agriculture or any other basic survival activity. In fact, in many cases, populations start raising their crops in mined fields or start using mined roads as soon as a conflict finishes, which results in a high number of human casualties.
Therefore, this approach intends to be a pragmatic way of reducing the number of casualties, by providing the populations with immediate risk assessment information about the terrains they will be using.
Ares: A Compliant and Sustainable Robot
In order to cope with the requirements of a portable demining kit, the Ares robot was developed (Cruz, H. et al, 2005). Fig. 1 illustrates the robot's mechanical structure, in which it is possible to see its four independently steered wheels in four different locomotion modes.
The upper bounds of the volume occupied by the robot are, 1.51m × 1.36 m × 0.66 m The actual volume varies according to the selected locomotion mode (see Fig. 1).
Both front and rear axes can freely and independently rotate around a longitudinal spinal axis (see Fig. 2). By having this passive joint, the robot is capable of being compliant with respect to an uneven terrain.
The robot is capable of executing the following locomotion modes:
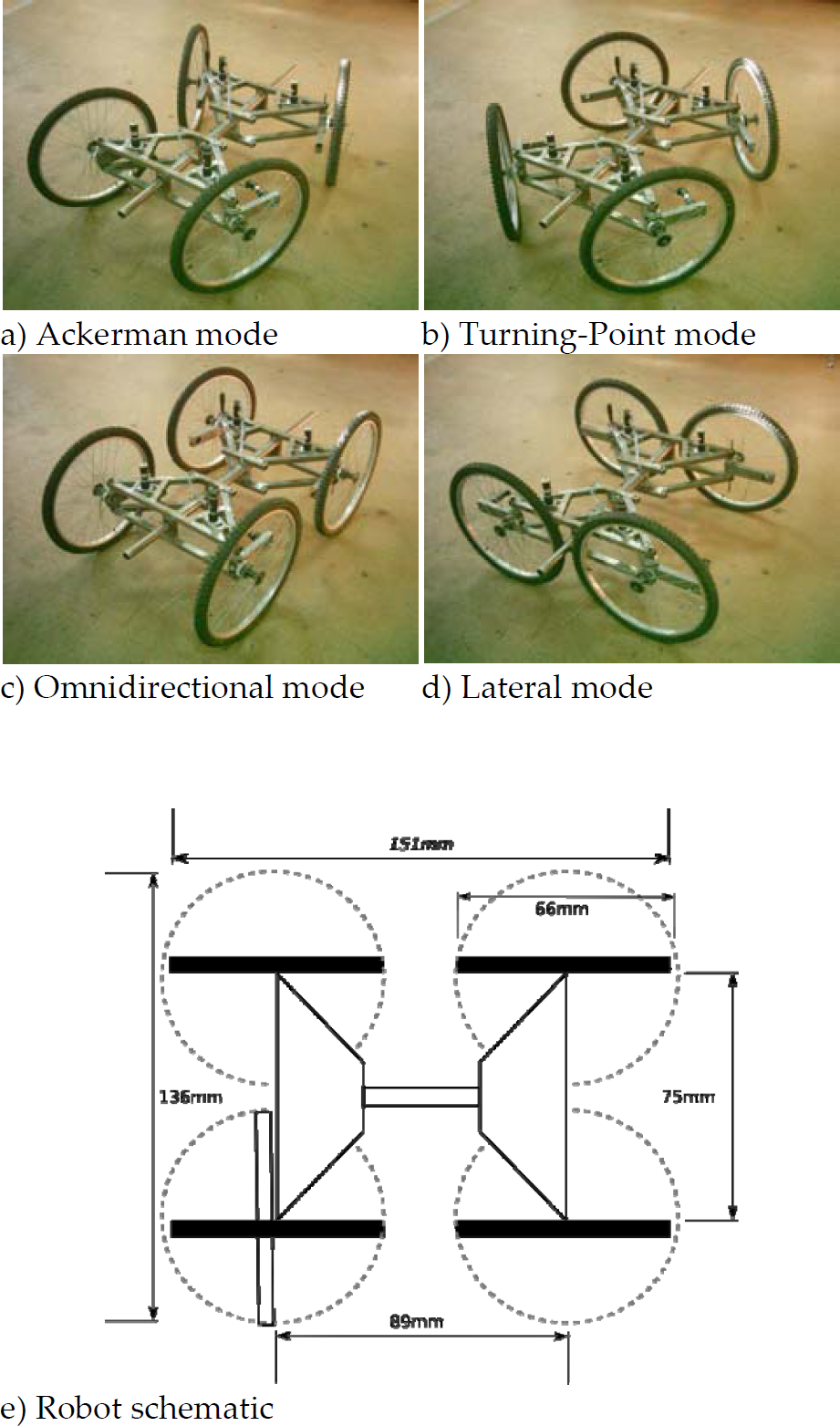
Ares' locomotion modes in a), b), c) and d), and its schematic in e).
This characteristic of high mobility enables low friction quasi-holonomic motions. This is of extreme importance in the case of demining tasks, in which locomotion with lateral slippage is undesirable as it can trigger landmines by disturbing the ground.
The robot is implemented with low-cost, easily available components, like bicycle wheels. Besides being low cost and widely available, bicycle wheels also have the advantage of providing the robot with a considerable height to the ground (40cm).
The size of the wheels and the compliant body are extremely important features in reducing the sensorial and computational requirements of the robot, as they reduce the need for explicit handling of most natural obstacles (e.g. small rocks) present in the minefield. Less sensors and computer power results in less energy consumption, less complexity, less cost, and consequently a more affordable and sustainable platform for mine action.
By adapting the tyres to the nature of the terrain, it will be possible to cope with most environments where the system is to be applied. These environments are areas used by people, and thus to some extent already clean and traversable.
Extreme environments, such as those with dense vegetation, significantly rocky, etc., usually require specific solutions, which if to be covered optimally, would require the robot to be much more complex then necessary for most applications.
Since the robot is still a prototype, the hardware was selected taking into account factors of scalability, usability and re-usability. This guarantees fast prototyping and some degree of freedom in terms of portability to other domains.
However, these requirements seldom cope with low-cost and low-power requirements. Therefore, parts selection also took into account the need for an eventual replacement with low-cost counterparts.
The computational unit is a Diamond Systems Hercules EBX running Linux (Slackware distribution). To estimate robot's posture, a tilt, pitch, and yaw Honeywell HMR 3000 sensor is used. In order to measure the « torsion » of the robot, i.e. the angular difference between the front and rear axes (see Fig. 2), a high quality potentiometer is used. A conventional GPS device is being used to position sensing. The robot is connected to a wireless network through a conventional wireless access point with approximately 300m range in line of sight. Speed/position motor control is performed by four RoboteQ AX3500 boards (one per wheel). A game-pad connected to a conventional laptop via a USB port is being used as control centre.

Testing the Ares robot for demanding terrains.
In order to keep the system affordable, and bearing in mind the task of area reduction, the robot will be equipped mainly with odour sensors, capable of detecting, among others, TNT particles. Sensors will be preferably fixed to the robot's body, avoiding thus the use of robotic arms, which are expensive, complex, and typically unreliable.
A Biologically Inspired Locomotion Control
A Four-Wheel-Steering Robot (FWSR) is a machine with several joints that need effective coordination. See for instance the case of the Double Ackerman locomotion mode (fig 1a), where the inner wheels have to turn slower than the outer wheels if the Ackerman geometry is to be continuously maintained.
Maintaining the Ackerman geometry is essential to avoid wheel slippage, which usually induces mechanical stress and extra energy consumption. The environment (e.g. terrain irregularities) and mechanical problems (e.g. mechanical friction) can project some unexpected forces onto the robot. Instead of pushing the motors up-to their saturation levels in order to keep Ackerman geometry whilst reducing the reference error (i.e. the desired turning radius), the robot should comply with the environment in a dynamical way.
Hence, instead of defining a desired behaviour which when infeasible triggers an error recovery strategy, one designs the way both environment and robot interact in a dynamic way.
These problems are attracting considerable attention from the research community (see for instance the Nomad robot for planetary exploration (Rollins, E. et al., 1998)). Linear control techniques (e.g. (Makatchev, M. et al., 2000)), are amongst the most popular techniques applied to control this type of robot, hardly cope with the compliance requirements set above.
General overview
A more intuitive and biologically plausible approach was proposed in (Santana, P. F. et al., 2006). In this method, each wheel is considered to be an independent entity that reacts in accordance to some local rules. Following the Virtual Components Approach (Pratt, J. et al., 2001), some behaviours were developed to implement these local rules, by means of a set of virtual elements with a physical counterpart (e.g. potential fields) to describe the desired behaviour a part of the robot has relative to another one, or to the environment. The local emplacement of the virtual components allows an intuitive design of motion control systems resulting in a fast development phase. The Virtual Components approach instantiates this methodology with passive virtual components, like springs and dampers. Here, a simple approach is followed. In particular, a 1-D version of the potential field method is used. This allows an easier implementation, and at the same time enables the (almost) direct application of the schema-based behavioural architecture (Arkin, R.C., 1989).
The controller responsible for acting upon each wheel is based on the schema-based architecture, where a set of motor-schemas contributes to the resulting action. For the Ackerman locomotion method, three motor-schemas have been implemented:
The turning radius motor schema is responsible for driving the steering actuator towards the angle that meets the desired instantaneous turning radius (IRC). This angle is different for each wheel. The Ackerman error control motor schema guides the steering actuator so as to reduce the Ackerman error between the wheel in question and all other wheels. The stiffness control motor schema compels the wheel to be compliant to the environment. That is to say it reacts to motion opposition caused by intrinsic (e.g. mechanical friction) and extrinsic (e.g. blocking obstacle) factors.
Potential Field Space
In this work, each motor-schema creates its own 1-D potential field space, designed to produce the desired behaviour. A point in the potential field space corresponds to an angular distance to be travelled by the steering actuator. According to sensory information, goals, etc., a motor-schema populates its potential field space with potential fields that can either attract or repel the steering actuator. The superposition of all potential fields over position zero in the potential field space, produces a “force” which will generate a proportional steering angular speed. As an example, the particular case of the Ackerman error control motor schema is analysed below (see Fig. 3).
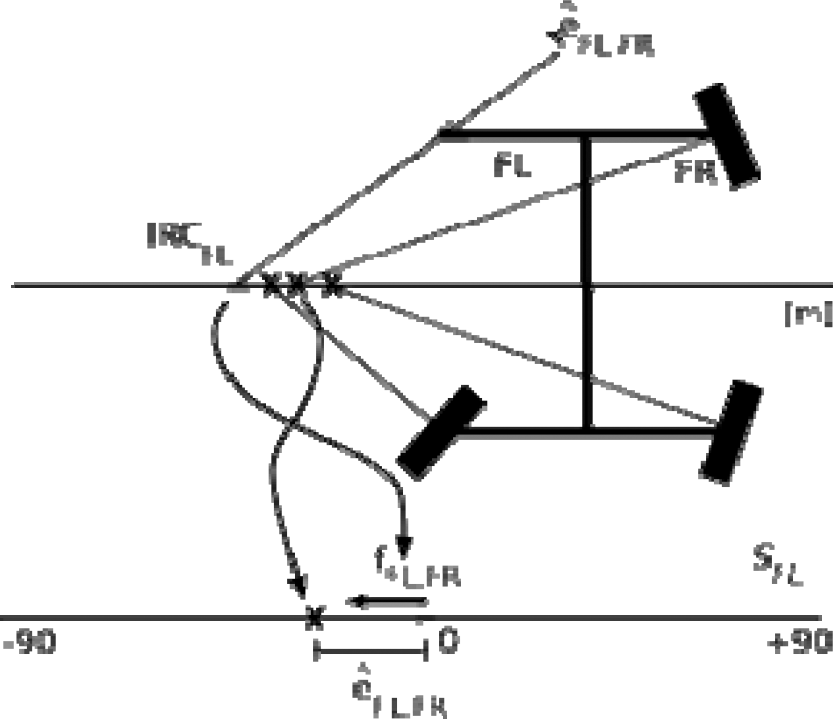
Partial view of the double Ackerman error control motor-schema for the front-left wheel.
First, the motor-schema determines the Ackerman error that the steering actuator FL (front-left) has, relative to all others. For instance, relative to FR (front right), the error is given by êFL,FR. This value refers to the number of degrees FL has to turn so as to guarantee that there is no Ackerman error between both steering actuators, i.e. IRCFL=IRCFR.
Then, an attractive potential field is added to the potential field space in the position defined by êFL,FR. This potential field induces an attractive force onto the steering actuator, in order to reduce the Ackerman error relative to FR (i.e. êFL,FR=0). The attraction to one of the steering actuators is then weighed against the attraction to the other steering actuators, following the procedure described above. Since all other wheel controllers are implemented likewise, steering actuators will cooperate implicitly.
Weights are defined empirically but their explicit semantic allows one to distinguish them clearly so as to refine the displayed behaviour, even in qualitative terms. Please refer to (Santana, P. F. et al, 2006a) for further details and experimental results obtained in simulation demonstrating the capabilities of the method.
The work on rough terrain navigation has been typically tackled with high-cost solutions. See for instance the case of the DARPA Grand Challenge 1 , where robots are invited to race on demanding desert terrains. In its generality, those robots rely on high-cost and complex technologies, such as 3-D laser scanners, stereoscopic vision systems, etc., which require enormous budgets as well as demanding man-power requirements.
Some early studies about a novel concept for affordable embodied all-terrain locomotion are presented in (Santana, P. F., 2005; Cruz, H. et al, 2005). The basic idea of this concept is to categorise the environment recurring to little computational power, by means of properly distributing simple sensors in key locations of the robot's body. The relative perspective these sensors have over the world makes them
The Ares robot was equipped with a set of simple sensors according to this approach (see fig 4) so as to implement physical filters to distinguish tall from low objects, and obtrusive from non-obtrusive objects. Namely,
An upper sonar set composed of eight sensors mounted on an elevated pendular platform allows the robot to detect tall objects (e.g. trees). The higher the platform is, the higher the objects must be in order to be detected by the sensors. Hence, specifying the height of the platform is like tuning a filter to reject low objects. Being pendular, the platform keeps its vertical position whatever the robot's roll angle. To detect low objects, lower sonar set single sonar in this case) is used for the purpose. Once again, this sonar set implements a physical filter to detect low objects. Two front bumpers attached to tunable springs detect obtrusive objects (e.g. dense bushes). If a bumper is triggered, then it means that the robot touched an object that projects a force onto the robot greater than the one produced by the springs. Thus, specifying the strength of the springs is like tuning a filter to accept non-obtrusive objects (e.g. weeds).
It is possible to react to all obstacles (i.e. obtrusive objects) encountered by the robot using the bumpers alone. For a proper piloting of the robot, however, detecting obstacles before colliding with them is required. To do so, some heuristic knowledge about the environment can be used. Typical examples of such knowledge are the facts that usually: weeds are low objects and not obstacles to the robot; trees are tall objects and obstacles to the robot; rocks are low objects and obstacles to the robot. Based on these heuristics, the previously presented physical filters can be used to avoid obstacles. Since from the above facts follows that tall objects are usually obstacles, each time a sensor in the upper sonar set detects something (i.e. a tall object) the robot should avoid it according to a given avoidance policy.
However, some low objects are obstacles (see for instance the case of rocks). Therefore, each time an object is detected by the lower sonar set (i.e. a low object), the robot slows down its speed as it is not positively sure about the nature of the object. If a bumper is triggered afterwards, then the robot initiates an avoidance routine as it has detected an obtrusive object, and consequently an obstacle.
This example illustrates how it is no longer possible to distinguish between software and hardware in terms of what takes control over what. Under this paradigm, the robot's body is part of the decision process, i.e. it is fully embodied. These ideas are closely related to the principles of morphological computation (Pfeifer, R. & Iida, F., 2005), in the sense that the body of the robot contributes greatly to the decision making process. In fact, some parameters of the robot's morphology (e.g. the height of the upper sonar set) can be used as constants in a holistic embodied algorithm. The absence of any central geometric representation of the environment results in low-cost and robust robots.
For the sake of clarity, another example of embodied decision making, in this case to implement a filter to detect high slope terrain, is given. Above a certain roll angle, the sensors in the upper sonar set detect one of the side poles (see Fig. 4), which are then categorised as tall objects, and consequently as obstacles. An obstacle avoidance reflex triggered by the upper sonar set compels the robot to move on in the opposite direction from the obstacle. The net effect is that the robot restores a safe roll angle. Notice that in the context of the high slope avoidance mechanism, which is not explicitly implemented, the high slope is categorised as tall object. In other words, the semantics of the percept can only be made explicit when considering its receptor (i.e. a behaviour).

An older version of the Ares robot (without steering actuators) equipped with sensors for affordable all-terrain piloting.
Although a method to implement embodied all-terrain controllers was presented in the previous section, the underlying architecture was not covered. Hence, this section briefly covers a behavioural architecture which was especially designed for disposable/affordable robots, the Survival Kit (SK).
Motivation
The SK architecture is the bottom layer of the robot control system, and it supplies the robot with safe local navigation capabilities. Thus, everything required to maintain the survival of the robot, in terms of immediate reactions, should be implemented within the SK architecture. Upper-layers are allowed to modulate the SK, being the former disturbed as little as possible. Fig. 5 illustrates the main components of the SK architecture, which are briefly covered below.

The Survival Kit Architecture.
The core of the architecture is the action feature space, which indirectly describes all the robot available actions. An action feature is an attribute of the action, such as the maximum allowed velocity and the maximum distance the robot can travel in a given sector of the environment. This departs from the conventional action space, in which actions are explicitly represented by tuples that are directly mapped to actuator commands, such as linear and angular velocities.
The action feature space is composed of two sub-spaces: the space-variant and the space-invariant.
The space-variant action feature sub-space is sectorial. Each sector corresponds to a region in the environment with the same shape. In each sector, associated to each action feature there are two slots, one for a constraint on the respective action feature, and another one for its temporal validity. A second action feature sub-space, the space-invariant action feature sub-space, is composed of action features without spatial relationship, such as possibility of producing angular velocities. These action features can also be temporarily constrained.
Reflexes
Reflexes are units responsible for constraining action features in order to implement a part of the survival policy, such as reacting to a collision.
For the sake of clarity an example is given. Let us define the action feature vmax, as the maximum linear velocity allowed in a given sector of the environment, and a reflex adapt_speed, as the mechanism to set up the maximum speed the robot can travel in a given sector of the environment based on the terrain's roughness. This reflex can then add constraints to vmax so as to limit the robot's speed when the terrain's roughness increases. For instance, a constraint of 1 ms−1 could be added to vmax in sector 0 for 100 ms. and the reflex explicitly states what is the maximum speed the robot can have when travelling along sector 0, if its mechanical structure is to be preserved.
A set of conditions must be met when accepting a new constraint. If a new constraint reduces the possible set of actions (e.g. if the new constraint intends to reduce the value of vmax to 0.5 ms−1), then it is immediately accepted. If the new constraint validity is greater than the current one, then the constraint validity is updated with the newer value. This approach guarantees that new constraints never relax the previous ones, if they are still valid, nor their validity time. When its validity time expires a constraint is released.
Modulation
Modulation comes in many forms. Upper layers can: constrain action features, suppress reflexes (e.g. docking requires to suppress reflexes sensible to bumpers), and provide a desired course of action (e.g. desired speed and direction).
This plasticity is a must if the SK is to be embedded into a more complex system capable of producing complex adaptive behaviour.
The Coordination Node
The coordination node is the module responsible for selecting from the still available actions, the one that better suits the modulatory signal provided by the upper layer. This is done by maximising an objective function that selects the best sector from the still available ones, and then builds up the commands that are immediately sent to the actuators. The objective function takes into account the free-space connectivity of the environment for a proper navigation through obstacles, among others.
All-Terrain Piloting
It is worth mentioning that the previously presented all-terrain piloting method is directly mapped into this architecture. Reflexes implement reactions to the physical tuned filters by specifying constraints, such as constraining vmax in the presence of low objects. Further details can be found in (Santana, P. F., 2005).
Discussion
Typically, behaviour-based architectures assume that behaviours cast either the best action in their perspective (Brooks, R., 1986; Correia, L. & Garção, A. S., 1995; Arkin, R. C., 1989) or a set of preferences over the action space (Rosenblatt, J. K., 1995; Pirjanian, P., 1998). In the latter case the coordination node aggregates more information to better handle situations where different behaviours cast conflicting actions.
In the SK architecture, however, a constraint applied to an action feature implicitly represents a set of constraints applied to a sub-set of the action space. Hence, although the amount of data flowing towards the coordination node is smaller in the SK case, the amount of information embedded on it is much larger (i.e. there is a data compression effect). This also results in reduced memory requirements. In addition, constraints added to the the action feature space have inertia (i.e. validity) to naturally handle noisy sensors, creating Fixed Action Patterns, and maintaining local implicit representations of the environment. Please refer to (Santana, P. F., 2005; Santana, P. F. & Correia, L., 2005; Santana, P. F. & Correia, L., 2006) for further details.
DSAAR: A Distributed Software Architecture for Autonomous Robots
This section introduces a multi-agent system, the DSAAR architecture (Santana, P. F. et al., 2006b), which aims to provide the computational backbone for the implementation of a remote monitoring toolkit. The multi-agent paradigm fits perfectly to the humanitarian demining domain (Santana, P. F. & Barata, J., 2005a), where a set of interoperable autonomous entities, including robots and humans, must interact to accomplish a mission.
DSAAR is composed of a set of mission support agents through which operators can interact and control the system, and a set of physical agents, i.e. the robots, that actually perform the mission.
Mission Support Agents
Mission support agents are those required for product management and interface between the system and operators. These agents are implemented in Jade (Bellifemine, F. et al., 2003) for better portability and due to the good performance and support of this tool. It supports transparent execution of agents in different machines. Mission support agents are further specialised in team image agents, strategic agents and production agents, which are described below.
Team image agents mirror the physical robots in a local machine, through which operators can interact with the robots via an abstract representation. Strategic agents, aided by operators, (re-)configure the robot team to accomplish the mission. Production agents fetch landmine detection sensors data fed by the robots and transform it into information and knowledge, which is eventually used by end-users to assess the existence of minefields and other related information.
Physical Agents Layer
As previously mentioned, a physical agent is a robot performing in the minefield. Fig. 6 illustrates the main logical modules composing a robot's control system under DSAAR. A set of Jade agents (blue circles) is responsible for implementing the robot's social skills. Hence, these agents interface to other agents representing other robots to act cooperatively. They also interact with mission support agents for the already mentioned operator services. All agents in the system communicate with FIPA-ACL (FIPA compliant Agent Communication Language) messages according to a specified ontology.
In the bottom of Fig. 6 it is possible to depict a set of entities responsible for the control of the robot's autonomous behaviour. These entities are implemented as Linux processes following an appropriate control model. The Survival Kit architecture and locomotion control method presented in sections 7 and 8 respectively, are implemented at this level.
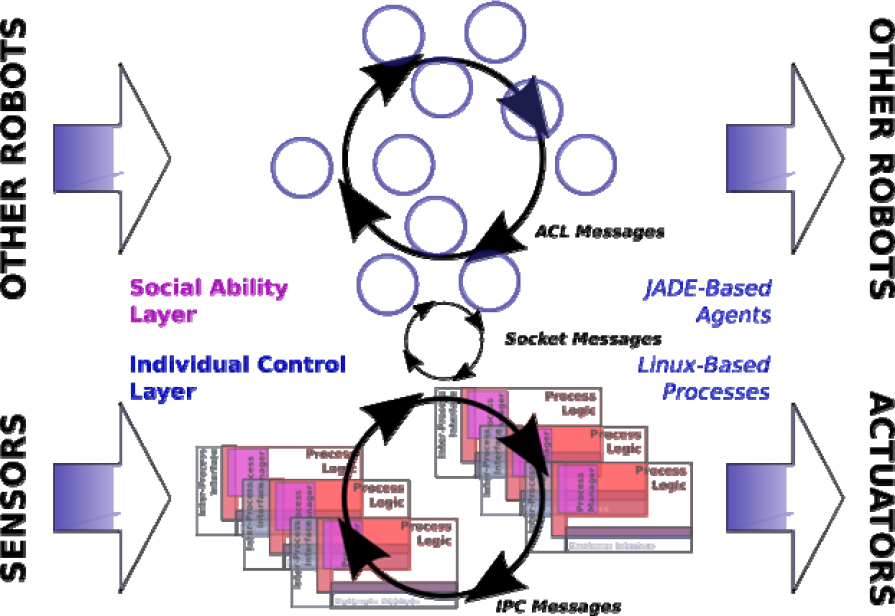
The structure of a DSAAR Physical Agent.
The system developer is provided with design guidelines in addition to a set of APIs and scripts to handle system level issues, such as inter-process messaging, process life-cycle and management.
In order to test the system, a set of field trials were carried out (Fig. 7 illustrates one of the chosen scenarios). For this purpose, the DSAAR architecture was instantiated as depicted in Fig. 8. Four processes were implemented. Namely,
A logging process receives and manages log messages sent by other processes. A locomotion process implements and adapted version of the locomotion control method presented in section 6. The motion is generated according to received locomotion messages (i.e. desired direction, speed, and locomotion mode). A localisation process fetches and relays tilt, pitch, yaw, and localisation data from the sensors. An interface process receives a tele-operation message through a socket connection and relays it as locomotion message to the locomotion process.

The Ares robot in a field trial.

The implemented instance for the field trial. Dotted, dashed, and filled lines refer to hardware interfaces, file access, and IPC messages, respectively.
Linux message queues were used for inter-process communication.
A single Jade agent running in the social ability layer, the local image agent, is responsible for bridging the gap between the physical agent (i.e. the robot) and a mission support tele-operation control agent. The latter runs in a laptop through which the operator controls the robot. The tele-operation control agent is associated to a graphical user interface, which provides robot's telemetry to the operator, and receives tele-operation commands via a game-pad, such as desired direction, speed, and locomotion mode.
The local image agent relays tele-operation commands to the interface process. In addition, the agent accesses the log files in order to provide the remote agent with updated telemetry data.
Although the project is far from its end, it was confirmed that Jade agents and Linux processes can interact conveniently and efficiently on the Ares robot's on-board computer. It was showed the ability of the system to control the robot's locomotion, to manage sensory and action data, and to perform extensive logging.
These results, in addition to the scalability provided by Jade, allow us to consider that the system will scale fairly well with the complexity of the requirements.
A roadmap for the development of advanced technology for the mine action domain, with special focus on mobile robots, was proposed. It was concluded that affordable area reduction is the area of application with better chances of fast return of investment. In addition, technology transfer must be attained so as to dodge the difficulties in introducing novel technology into this domain. This leads to the conclusion that our activities should target a generic remote monitoring toolkit and in particular a portable demining kit for urgent situations.
Based on these conclusions a bulk of work, mostly biologically inspired, was presented. The rationale behind all developments was sustainability. Sustainability can be seen at the level of:
having low-cost robots with locally available components (e.g. bicycle wheels); using locomotion control systems compliant to the environment (i.e. with low mechanical and energetic stress) with intuitive design methods (i.e. the use of virtual components); employing embodied all-terrain piloting techniques with simple sensory and computational apparatus; using the Survival Kit architecture targeting disposable/affordable robots; supporting the engineering of the control system via the use of a scalable and portable distributed software architecture.
Hence, the proposed work was designed in order to be sustainable in economical, maintenance, ecological, and (re-)engineering terms. It is thus possible to conclude that biologically inspired design is of great interest for the development of sustainable demining robots.
As ongoing work, we are refining the Ares robot, and developing new localisation techniques for accurate landmine sensors data fusion. In addition, the all-terrain navigation system is being extended. We are also designing a configuration tool for mission design and supervision, as well as implementing humanitarian demining specific robot behaviours. Finally, a relevant aspect for the feasibility of the Remote Monitoring Toolkit concept, which is to guarantee a robust networking among all agents in the system, is being studied as well.
Footnotes
12. Acknowledgements
The authors wish to thank Mel Todd for proofreading, Carlos Cândido, Vasco Santos, Hélder Monteiro, Luís Flores, Nuno Flores, André Santos, António Mestre, Hildebrando Cruz, Hugo Vilardouro, João Lisboa, João Praça, Nelson Compadrinho, Nuno Ramos, and Rui Maltez, who, with different levels of involvement, were all essential for any of the success that may be credited to this project.
1
http://www.darpa.mil/grandchallenge/