
Abstract
An EOD robot system, SUPER-PLUS, which has a novel semi-automatic bomb fetching function is presented in this paper. With limited support of human, SUPER-PLUS scans the cluttered environment with a wrist-mounted laser distance sensor and plans the manipulator a collision free path to fetch the bomb. The model construction of manipulator, bomb and environment, C-space map, path planning and the operation procedure are introduced in detail. The semi-automatic bomb fetching function has greatly improved the operation performance of EOD robot.
Introduction
EOD Robots take the place of humans in the work of bomb detection, removal, transportation and detonation. Bombs that are difficult to neutralize or demolish because of the location may not be suitable to explode for fear of human injury or building damage. The operator of the EOD robot has to fetch the bombs with a manipulator, and carry them into a blast protection box for transporting to a safe place. The operational performance of the manipulator does not meet the expectation of customers today.
First, most developed EOD robot systems adopt a tele-operation control scheme. The operator controls the robot and its manipulator to dispose bombs by watching on-site video signals from cameras. The operator has to switch frequently his eye sight between the display screen and the operation panel, which are separately located. In addition, the operation panel always has dozens of pushbuttons and knobs which are designed for functions such as mobile base movements, manipulator operation, velocity adjusting, cameras switching, paw's on-off and etc. Most EOD robots use a joystick-type device, and the number of degrees of freedom is insufficient to control all joints at a time. Due to the complexity of operation, the operator needs to fully concentrate to avoid mix up of these pushbuttons and knobs. Any carelessness may lead to severe results. The high mental pressure and resulting exhaustion presents low security and low efficiency.
Second, the terrains where individuals place bombs are very different. The surroundings of bombs are unknown and unstructured, which become the potential obstacles during bomb disposal. Besides, with the innovation of explosive theory, creation of a variety of bombs and improved manufacturing technology of bombs make bomb disposal more difficult. It makes the disposal operation a big challenge for the operators especially when the surroundings are complex and cluttered. The operator may fear failure of avoiding a collision of the manipulator with surroundings or bomb, and this may trigger the bomb.
To increase the security and efficiency of bomb disposal operation and decrease the mental pressure of operators, many efforts had been made.
Angle sensors are installed in joints of the manipulator in ABP EOD robots. The arms can be displayed on a LCD screen. It helps the operator to know the status of manipulator. Before this improvement, it was done by turning the cameras around because sometimes the arms were out of view. 3D cameras are put into practice in TELERO to help the operator see the surroundings with 3D vision instead of a 2D display screen. A wearable multi-modal user interface is implemented for a teleoperated field robot system (Dongseok, Ryu. etc al. 2005). The research provides multi-modalities such as visual, auditory and haptic sense.
Some researchers are interested in efficient view planning which is a key issue for autonomous manipulator in exploring and mapping the environment around it. A motion planning and inspection system comprising a PUMA robot with a wrist mounted range sensor was described (E., Kruse et al. 1996). The view planning algorithm maximizes the unknown physical space to be sensed in each scan. Another view planning strategy was brought out (P., Renton. etc al. 1999 and Belen C. etc al. 2002) to scan the given goal voxel or to scan sub-goal voxels which block the movement of the robot. An adaptive algorithm (Yifeng, Huang. etc al. 2005), called Adaptive Viewpoint Candidates Entropy (AVCE) criterion, that biases the search toward C-space or toward work-space was introduced. They take both exploring maneuverability and efficiency into consideration.
Although much work mentioned above had been done, no automatic bomb fetching function was implemented in the EOD robots. The SUPER-PLUS is a semi-automatic EOD robot system whose prototype, SUPER-I, was developed as a teleoperated mobile manipulator through our past research. With limited human support, SUPER-PLUS can scan the cluttered environment with a wrist-mounted laser distance sensor and plan the manipulator a collision free path to fetch the bomb.
The system architecture of SUPER-PLUS
SUPER-PLUS is an EOD robot, as shown in Fig. 1. The mobile base is designed to get high adaptability to uneven terrain using joint wheels, and a manipulator is equipped on the mobile base. A laser distance sensor is mounted on the manipulator wrist. The environment information is gathered from the laser distance sensor, cameras, ultrasonic sensors and rotary encoders. The manipulator includes upper arm rotation, forearm rotation and wrist rotation. The position of the end-effector depends on the poses of the upper arm and forearm.

SUPER-PLUS EOD Robot System
The rotation of wrist influences the pose of end effector. The manipulator of SUPER-PLUS can only move in a plane. The assumption, which must be satisfied, requires moving the mobile base in advance to locate the bomb in the plane where the manipulator works. Actually, at present most commercial EOD robots only can move in a plane because adding more degrees of freedom will increase the complexity and decrease the reliability of the whole system.
Fig. 2 shows the control system architecture of the SUPER-PLUS, which is divided into 3 layers: control DSP layer (lower layer), slave PC layer (middle layer) and master PC layer (higher layer). DSP is responsible for sensor signal input, motor drive and closed loop control. DSP communicates with the slave PC through a USB interface. The slave PC concentrates on the path planning algorithm and collecting camera signals. The slave PC exchanges data with the master PC through a wireless LAN.

Control Architecture of SUPER-PLUS
Graphical Interfaces of SUPER-PLUS shown in Fig. 3 are composed of three zones: Control Zone, Simulation Zone and Video Zone. All the information is integrated to the screen which makes the operation more intuitive. The manipulator moves not only in the joint space but also in Cartesian space. The most important aspect is it can move semi-automatically. The current statuses are displayed in the simulation zone regardless of whether the manipulator is in sight of the cameras or not.
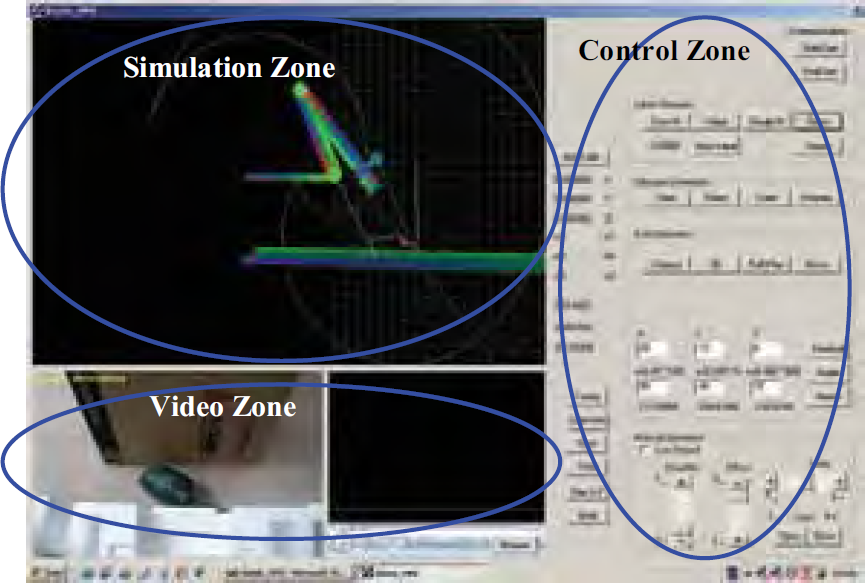
Graphical Interfaces of SUPER-PLUS
Each arm of the manipulator is simplified in the computer as a rectangle (Showed in Fig. 4 (a)) which covers the whole arm, including accessorial components such as cameras, laser distance sensor and etc. The advantage of doing this is to save some calculation to keep the arms away from obstacles at a proper distance in advance. The disadvantage is having lost some useful space. Fig. 4 (b) shows the model constructions of environment and bomb. The manipulator is manually moved to measure the environment. The distance 1 can be measured. 03 is the zero point of tool coordinate reference. The offset of the laser distance sensor is [0, -b, -a]T. [xw, yw, zw]T is used as the world coordinate of the obstacle boundary and Ai (i = 1, 2, 3) are used as the coordinate matrix transforms.


Models of Obstacles and Bomb
Obstacle Boundary Measured is a little different with the Real Obstacle Boundary due to measuring errors. The operator moves the manipulator to let the laser point lie in the approximate center of the bomb and gives a single measurement. Point 2 is e long from the measuring point along the laser direction, e can not be longer than c. Otherwise the bomb is too big for the paw to be held.
If c (the depth of gripper) and e have a proper scale and the manipulator does not interfere into the obstacles, the manipulator will keep a safe fetching distance, e should be a little smaller than c to keep the gripper from knocking into bomb, which is decided by the laser distance measuring precision and the precision of the manipulator. In our case, e=0.8*c. The second condition is not satisfied because the bomb is included in the obstacle. The robot will regard the bomb as obstacles.
The bomb should be “dug out”. A circle whose radius is R is used to “dig out” the bomb. R and the bigger value of d/2 (the forearm width) and c should keep a proper scale. If it is too small, the gripper can not plug in and if it is too big, some obstacle area may be taken as free space. As same as the relation between c and e, it is decided by the precision of distance measuring and manipulator. We recommend:

The part of Measured Obstacle Boundary in the “dig out” circle is the former boundary and it is replaced by a new curve which is part of the circle, Obstacle Boundary Dug Out.
There are several methods which map W-space to C-space, such as needle method, point evaluation method, boundary equation method, volume scan method and Jacobian-based matrix method. Here needle method is used: For a manipulator of n degrees of freedom, n-1 degrees are fixed beforehand and calculate what value the last degree is when the manipulator collides with obstacles. It is easy to be realized because its cycle feature is fit for computer calculation.
The upper arm (columns) plays a more important role than the forearm (rows) in free C-space calculation because the upper arm can restrict rotation of the forearm. We will discuss collision of the forearm according to columns (different upper arm rotating angles). Use Max-collision as the maxim number of collision testing and Min-collision as the minimum.

Max-collision occurs as the upper arm does not collide with obstacles at each column and Min-collision occurs as the upper arm collides with obstacles all the time.
After the free C-space is built, a collision free path from the start point to destination point must be found. This problem can be solved by heuristic search in AI. A* is a typical heuristic algorithm. It works in this way: A function is designed to calculate the cost of each point searched. During each search, evaluate points which will be arrived by the next step in the cost function and choose the minimum one for the next search. By using A*, a collision free path can be acquired in C-space. Backward to W-space, the manipulator can fetch the bomb without any collision.
The operational procedure follows:
the operator moves the mobile base to get close to the bomb and adjusts the mobile base and the manipulator to target the laser spot on the bomb. It is to ensure that the bomb is in the working plane. the operator starts the laser distance sensor to measure the distance between the sensor and the bomb. The position of the bomb can be calculated by kinematical functions. As shown in Fig. 5, if the bomb is not within the range of the manipulator, the computer will give an alarm with adjustments needed to include the bomb in the manipulator's range. the operator starts a laser scanning subprogram. The operator moves the manipulator to scan obstacles manually and the obstacle drawing will be displayed on the screen in real-time. the PC starts a collision free C-space calculation subprogram, as shown in Fig. 6. The black zone is collision space and the rest is collision free space. the PC starts a path planning subprogram. If it succeeds, a path shown in Fig. 7 will be found. If it fails, the operator will need to go back to step 1 and try to access the bomb from another direction. Computer drives the manipulator automatically to fetch the bomb according to the planned path.
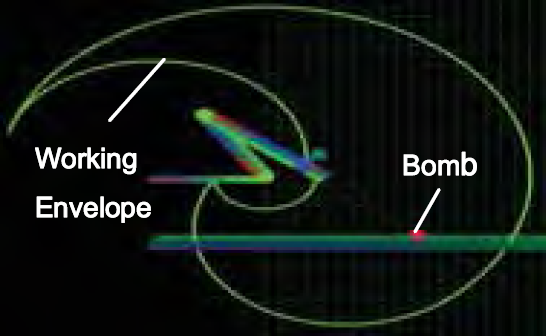
Working Envelope Displayed on HMI Screen

Configuration Space Map

Path Planning with A* Algorism
During the operation, the operator is able to distinguish the bomb from the obstacles, which is a very difficult task for computer. Distinguishing the bomb is designed as the operator's task. Also, since scanning the environment is difficult for a computer, it is assigned to the operator. On the contrary, the operation of multi-joint manipulator in a cluttered environment is exhausting for the operator, it is left for the computer.
We now present experimental results running on SUPER-PLUS showed in the Fig. 1. IBM T42 is used as the master PC and the slave PC. It is configured with a Pentium(R) 1.7G Hz Processor with 1 GB RAM. 3D simulation is based on OpenGL imbedded into VC++ in Windows XP OS. The working envelopes of the upper arm and forearm are 0–210 degree and 0–165 degree respectively. An 840*680 grid C-space is obtained by decentralizing with 0.25 degree.
To evaluate the efficiency of our solution as compared with the former, SUPER-I, an operation competition was designed as following:
The Object: Operators operate the manipulator one by one to fetch the bomb which is in the same cluttered environment. The bomb to be fetched is placed in an open trunk of a car. Score Standard: Total Score = (0.5*ScoreMP +0.5*ScoreTM)*ScoreSC
Where, ScoreMP is the score to evaluate the mental pressure of the operator. The Operator will score according to his mental feeling. There are 4 grades: Very High (10), High (40), General (70) and Low (100). ScoreTM is the score for time of the operation. The less time is taken, the higher the score. ScoreSC is used to evaluate level of the security of the operation. In the beginning everyone scores 1.0. Each time any part of the manipulator collides with obstacles or the bomb in an abnormal way, 0.5 is removed from ScoreSC until its value equals 0.
10 postgraduates are chosen and are given plenty of training to be familiar with operating both the SUPER-I and SUPER-PLUS. Then the postgraduates manage to finish the operations. The results are as following:
In Fig. 8, the lighter columns are the scores of SUPER-I and the darker ones are the score of SUPER-PLUS. From the statistical data, the average score of SUPER-PLUS is higher than that of SUPER-I in all categories. The total score of SUPER-PLUS is higher, as shown in Fig. 8 (d). It shows the semi-automatic solution of bomb fetching is beneficial.

Contrast between SUPER-I and SUPER-PLUS
This solution is implemented in SUPER-II, the next generation of SUPER-PLUS, Shown in Fig. 9 and similar results are attained.

SUPER-II EOD Robot System
A novel method which makes an EOD robot fetch the bomb semi-automatically with limited support from operator has greatly improved the operational performance of EOD robot. This method integrates the high intelligence of an operator and the powerful calculation ability of computer allowing both to do what they are best at. SUPER-PLUS and SUPER-II were built to help us research how to improve the operational performance further. The results are also useful for other teleoperation applications, such as humanitarian demining. We will focus on the EOD manipulator to do world modeling fully automatically in respect to the fact that the manipulator is mounted on a mobile base, which greatly restricts the EOD robot design.