
Abstract
Remote inspection, measurement and handling techniques are under development for use in CERN's particle accelerator facilities to reduce radiation exposure of personnel and reduce facility downtime when scheduled maintenance or breakdown repairs are needed. This paper gives an explanation of the potential benefits to CERN of remote inspection, measurement and handling along with a brief history of remote handling work at CERN. Recent projects are then described, covering the development work and operations forming part of CERN's recent remote inspection, measurement and handling activities.
1. Introduction
In this introductory chapter we will briefly describe the CERN accelerator complex, explain the main radiation issues and their implications, and then provide some background information about remote system development at CERN.
1.1 CERN accelerator complex
CERN, the European Organization for Nuclear Research, is an intergovernmental organization with 20 Member States, based in Geneva. CERN's mission is to enable international collaboration in the field of high-energy particle physics research; to this end it designs, builds and operates particle accelerators and the associated experimental areas. At present more than 10,000 scientific users from research institutes all over the world use CERN's installations for their experiments. The accelerator complex at CERN includes a succession of machines with increasingly higher energies. The flagship of this complex is the 27-km-circumference Large Hadron Collider (LHC). The different machines making up the CERN accelerator complex are shown in figure 1.
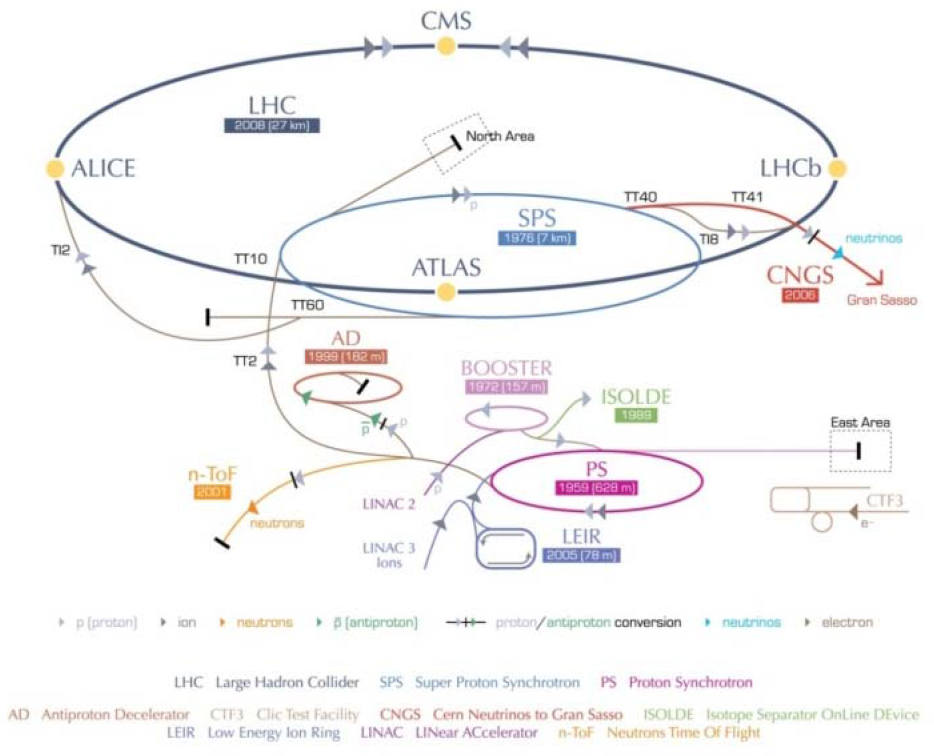
CERN accelerator complex
1.2 Radiation issues
The majority of CERN's accelerator beam lines are installed in approximately 50 km of underground tunnels; the earth above and around the tunnels provides radiation shielding. When particle beams are circulating in the machines, personnel access is not permitted for radiation safety reasons. Collisions between the particles present in the circulating beams and the components making up the accelerators result in the accelerator components becoming radioactive to varying degrees. This means that even when the beams are no longer circulating, personnel access to certain areas of the accelerators is not possible until sufficient time has passed for the radiation levels to reduce due to decay. The time needed for this decay varies and personnel access in some areas can be tightly restricted for periods of one year or more after the beam is stopped, whereas in other areas access can be made after a matter of minutes. The CERN Radiation Protection Group defines these access restrictions, and for certain zones a radiation protection technician has to enter the area to measure radiation levels to ensure they are low enough for repair or maintenance work to start.
The successful operation of the Large Hadron Collider (LHC) and its planned energy increases, along with developments in experiments such as ISOLDE
CERN has safety structures and procedures in place to keep radiation exposure of personnel as low as reasonably achievable (ALARA) [1]. Interventions by personnel need to be carefully planned and assessed beforehand to ensure radiation doses are optimized.
In the event of a breakdown, the first step for the accelerator operation and maintenance teams is to understand what has happened in order to plan and prepare for repair interventions. However, as explained above, it is not always possible for personnel to enter to carry out inspections until radiation levels have dropped.
Remote inspection therefore offers the possibility for diagnosis to start before personnel access is possible; this allows earlier understanding of the problem and preparation of the repair and, as a result, reduced down time of high-value facilities.
As remote techniques evolve, the possibilities to reduce the need for personnel to enter the radioactive zones to carry out inspection, measurements and handling are increasing. However, even when remote techniques can be applied, certain interventions will necessitate a combination of remote means and personnel access. This is because the level of dexterity required (when coupled with access difficulties) means that these interventions are beyond the abilities of currently available remote equipment.
1.3 Remote system development at CERN
Remote handling development activities at CERN were initiated in the 1960s, with much work done throughout the 1970s and 1980s. [2]. This work included development of remote mobile inspection devices (Private Eye series), a remote mobile multi-purpose remote handling vehicle equipped with twin force-reflecting Mascot servo manipulators (Mantis) and a remotely operated custom-designed mobile crane for ACOL (Antiproton Collector): the ACOL Service Vehicle. In addition, modular drive units were developed for custom geometry manipulator arms, along with tooling developments for specific tasks. Remote handling development activities were reduced in the 1990s during the construction of the LHC, as priority was placed on this flagship project.
This paper concentrates on the remote systems development and operation work carried out in the period since the LHC installation was completed in 2007. Particular concerns common to all these projects are the need for high reliability, the risk of damage to delicate accelerator equipment and the need to carefully consider failure modes and recovery techniques in the event of breakdown of the tele-operated equipment in a radiation area. Space is often limited in underground areas because of the need to keep civil engineering costs down during construction. A major concern, due to the nature of CERN's underground accelerator tunnel environments, is radio transmission for communication between the control station and the tele-operated equipment.
CERN's remote system development projects run from initial problem definition, studies and analysis using digital mock-ups, through building and commissioning to operation and further development. The work involves cooperation between the remote equipment developers and operators, the teams responsible for the different types of accelerator equipment, the accelerator operations staff and the Radiation Protection Group. Whenever possible, commercially available equipment is used to meet project needs in order to keep development costs and times down.
The recent projects described in this paper can be split into remote inspection and measurement and remote handling, as outlined below.
Remote inspection and measurement:
LHC remote inspection train
LHC remote alignment survey train
Remote handling:
ISOLDE robots
Collimator Exchange remotely operated Crane
LHC TAN mini cranes
Remote overhead travelling crane operation
Remotely operated vehicle (ROV)
Service vehicle Refurbishment.
Details of these projects are given in the following chapters.
2. LHC remote inspection train
For the LHC tunnel, a remote inspection train has been developed that is capable of carrying out remote visual inspections as well as taking measurements of radiation and oxygen levels along the tunnel. The train runs on a monorail I beam secured to the roof of the tunnel. Early developments are described in [3]. Details of the issues considered and the work carried out over recent years are given below.
2.1 Infrastructure
Radiation in the LHC during operation is not compatible with the use of standard industrial electronics; however, once the particle beams have been dumped the radiation levels are compatible with the use of standard electronics for the train. A solution allowing the train to be built using commercial electronics yet enabling it to have immediate access to the LHC tunnel, before personnel access is permitted, was found by parking the train in the by-pass gallery around the CMS experiment.
A key restriction on the train design was the need for it to be able to operate without any major modifications to the existing infrastructure. This means, for example, that the train can only communicate with the control room on the surface via a low bandwidth mobile phone network. Another constraint is the need for the train itself to have a small cross-section; this is necessary for it to be compatible with small openings in the sector and ventilation doors along the tunnel. See figure 2.

The train passing an LHC sector door
In order for the train to be able to drive around the LHC it was necessary to implement hatches in the ventilation doors around the tunnel. These hatches must be closed except when the train needs to pass them, and must be able to withstand the pressure differences between the two sides of the ventilation panels.
In the event of a failure of the hatch control system, the hatch has to close. For safety reasons, the ventilation door and hatch design have to ensure that personnel can easily open the ventilation door even if the train is stopped halfway through the door. The solution used is based on vertically sliding hatches installed in the ventilation doors. The sliding hatches close the opening under the monorail, whilst additional pneumatically operated flaps are installed to close the space around the monorail itself. See figure 3.

Pneumatic hatch in an LHC ventilation door
For radiation tolerance reasons, no electronics could be used in the hatch control system. Fully pneumatic logic circuits are therefore used to open and close the hatches as needed for the passage of the train and also to open and close the hatches when the ventilation doors are opened by personnel in the tunnel. Pairs of pneumatic valve switches positioned at about 8 m from each side of the ventilation panel detect the arrival and departure of the train. The pneumatic logic circuits detect the direction of motion of the train and so can deal with cases where the train stops halfway through the door and reverses out again.
2.2 Navigation
In the long term, the train is intended to be used by personnel working in shifts in the CERN Control Centre. For this reason it has been designed to be as autonomous as possible so that it does not require an operator to monitor its operation during all the time it is in movement. The operator specifies the required destination and the train travels autonomously to the position. Two counter wheels fitted with encoders are used to measure the train's speed and displacement along the tunnel; code bars installed approximately every 100 m reset the distance counter to ensure that cumulative positioning errors do not build up as the train makes journeys of several kilometres.
2.3 Communication between the train and the control station
Operation of the train requires transmission of control and data signals between the control station on the surface and the train, wherever it is in the tunnel. In addition, images from the train's cameras are transmitted to the control station. Transmission of images takes place at the rate of one frame every few seconds, and there is a delay in transmission of around one second. This slow data transmission is a result of the characteristics of the mobile telephone network installed in the LHC tunnel.
Radio transmission takes place via a leaky feeder cable all along the tunnel; the characteristics of the leaky feeder mean that the mobile phone network in the tunnel has not followed the increases in bandwidth that have been available on the surface. Improvements have been made recently to the mobile telephone infrastructure in the tunnel by CERN's IT department, allowing transmission rates of 384 kb/s. Further work to investigate how to optimize the available communication is planned.
In addition to the images transmitted as the train travels, the on-board pan-tilt-zoom cameras can be used for detailed visual inspection once the train arrives at its destination. See figure 4.

Remote inspection of cooling system seals
2.4 Energy
When the monorail I beam was originally built into the tunnel, it was part of the system used to transport components, such as magnets, during the installation of the LEP (Large Electron-Positron collider) accelerator that was housed in what is now the LHC tunnel. An electrical power rail was installed alongside the monorail I beam to supply the power to the monorail transport traction units. In order to avoid problems with sliding contacts and to ensure that the inspection train will be able to operate even if power is lost in a section of the rail, the train is battery powered. The train plugs into the power rail to charge the batteries when stationary. A battery monitor integrates the current drawn from, and charged into, the battery so that the remaining energy is known at any time.
2.5 Safety
A risk analysis was carried out early in the project and has been updated as the project has developed. In addition to the issues mentioned above, a key safety consideration is collision detection; laser scanners are fitted at both ends of the train and these are used to detect obstacles and stop the train as appropriate. These scanners are also used to check that the automatic hatches in the ventilation doors are fully open before the train passes through.
2.6 Remote LHC radiation survey
The remote radiation survey uses a specially equipped wagon, developed in collaboration with CERN's Radiation Protection Group, which is incorporated into the remote inspection train. The measured radiation dose rates corresponding to the position along the tunnel are recorded as the train travels alongside the machine and transmitted to the operator on the surface (see figure 5). The radiation dose rate probe is mounted on a retractable arm so that, when fully lowered, the probe is at the same height as the particle beam as the train travels along the tunnel. The arm is raised to pass through the safety door openings and lowered again once the door is passed. Dose rates measured by the train are compared with manual surveys to check the satisfactory operation of the system. The train clearly identifies ‘hotspots' of local high radiation levels; however, there is a scaling effect as the train probe is further away from the beam-line than a hand-held probe.
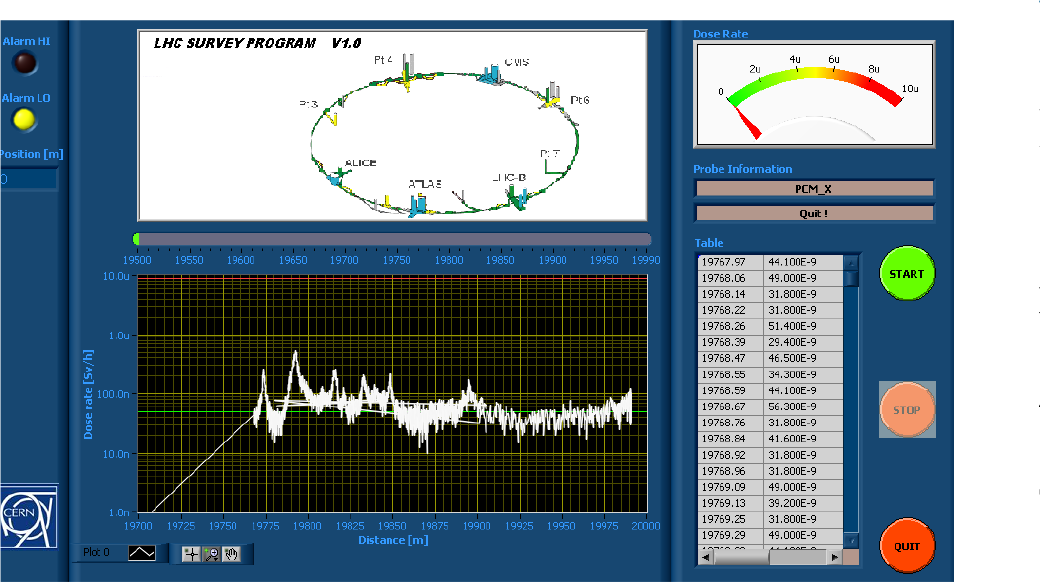
Radiation measurement display
2.7 Recent train development and operations
Recent developments have focussed on increasing reliability by a thorough review and simplification of the train operation programs and electrical hardware. Improvements have been made to the communication system, including the use of more advanced modems to take advantage of infrastructure upgrades. All this was verified by extensive mock-up testing before reinstallation in the LHC tunnel. Recent operational experience includes several rapid radiation surveys made during short (typically three hours or less) technical stops of the LHC. The use of the train during short technical stops necessitates good reliability and close collaboration with the LHC control centre.
2.8 Future developments of the inspection train
Future developments include the design of a new train based on the experience gained from the prototype. The design brief includes simplification where possible, safety and maintainability improvements, a more efficient traction system and an energy management system.
3. LHC remote alignment survey train
Another project based on the use of the LHC monorail-mounted remote inspection train is a system for the precise measurement of the alignment of the collimators, which will have the highest radiation dose rates of all the equipment in the LHC tunnel.
The system measures the precise alignment of collimators with respect to reference magnets. The technique uses a combination of probes mounted on two telescopic arms, which automatically follow a stretched wire installed in front of the collimators, and photogrammetry to measure the precise position and alignment of the collimators with respect to the stretched wire. Tests in the LHC tunnel mock-up and the LHC tunnel itself have shown good correlation with the results of manual surveys. Details are given in [4].
4. New robot systems for ISOLDE target handling
A new robot system is being developed for radioactive target exchange at ISOLDE. The existing robot system is coming to the end of its design life, and energy increases at ISOLDE mean that the new system will be exposed to higher radiation levels.
4.1 System description
The existing system is made up of two six-degree-of-freedom industrial robots mounted on linear axes that are permanently installed in the radiation area. The robots are pre-programmed to carry out transfers of radioactive targets from their point of irradiation to shielded storage shelves. The control system interfaces with the other equipment in the area such as the target supports and motorized shield doors. The new system will interface with the same equipment and will also operate in a pre-programmed manner.
The existing robot linear axis rails are installed in trenches in the target area floor. The ISOLDE operations team requested that the replacement system should avoid the need for these trenches as they lead to problems during other activities in the area – in particular exchange of the radioactive “front ends” that support the targets during operation of the facility. In order to allow the trenches to be filled in the new robots will be suspended from the ceiling.
The new system will use two Kuka robots with all electronics removed and the non-radiation-tolerant components, such as the wiring loom and some motor components, replaced with suitable alternatives. The robots use resolvers rather than encoders for axis position measurement, which makes the relocation of electronics away from the robot arm possible without the need for major changes in the robot controller.
4.2 Design studies and tests
The integration of the robots in the target area was modelled using 3-D Catia digital mock-ups of the zone and KukaSIM software to ensure compatibility with the existing interfaces (see figure 6).

3-D model of target area with suspended robots
A risk analysis was carried out, identifying breakdown recovery as a particular area of concern because of the increasingly severe restrictions on personnel access as radiation levels increase. The system therefore includes features to either avoid foreseeable problems or to enable recovery in the event of failure when the robots are handling highly radioactive targets. One example of problem avoidance is the implementation of robot motor current monitoring during pre-programmed operations; if a joint current exceeds its normal value for a given stage of an operation, the robot will stop. This monitoring allows detection of problems before the robot generates large forces on the other equipment in the area, and recovery is not hampered by the robot having cut out after exceeding the maximum joint current limit.
An example of a design for recovery is the new gripper shown in figure 7; the gripper is compatible with the existing target interfaces but includes improved remote recovery capabilities such as a remotely releasable lower jaw and open sides (rather than the closed sides used in the existing gripper) to allow more recovery trajectories if, for example, a robot joint drive fails.

New design of ISOLDE target gripper
A mock-up was built to allow assembly and testing of the new system (see figure 8). Programming and testing was carried out using real targets, a front-end support interface and storage shelves. The new system will be fully commissioned including recovery trials in the mock-up before the existing system is removed from ISOLDE. Preparation of the infrastructure will start in spring 2013 and the installation of the new system will be completed by the end of 2013.

Robot trials in mock-up of target area
4.3 Remote handling of ISOLDE and Medicis targets
In view of the good results already obtained during mock-up trials it has been decided to use a third identical robot mounted on the ceiling to carry out target transfers in a new target handling and storage area that will be part of a new medical isotope preparation facility (Medicis –
5. Collimator exchange remotely operated crane
LHC operation requires approximately 100 collimators at certain points around the ring to stop particles that stray from the desired beam orbits. The collimators become radioactive as a result of the collisions with these particles, which means that repair scenarios to minimize personnel access needed to be developed. The approach followed was to repair failed collimators by replacing the whole unit rather than trying to replace component parts. The collimators have been designed to facilitate remote replacement; vacuum connections are made using special beam pipe vacuum clamps and the collimator sits on supports fitted with guiding pins to ease their installation. Electrical and cooling water connections are established by automatic plug-in devices when the collimator is lowered onto its supports [5].
Initial installation of the LHC collimators was carried out using custom-designed trailer-cranes to transport the collimators along the tunnel and then transfer them onto their supports. These trailer-cranes rely on hands-on guidance from operators to guide the collimators during installation and close visual checks are needed to ensure the plug-in connections are engaging correctly (see figure 9).

Guidance during collimator installation
Relying on manual guidance was not a problem for initial installation before the LHC started operation, but the process will need to be carried out remotely in future as radiation levels increase. Based on the experience gained with the trailer-cranes, a conceptual design of a one-tonne-capacity remotely operated crane, specifically designed for collimator installation within the tight constraints of the LHC tunnel was produced. This was developed into a technical specification, and the equipment is currently under construction at a specialist supplier. The vision system needed for its operation is being developed separately at CERN and will be finalized in the LHC tunnel mock-up.
In accordance with risk analysis findings, the design specification includes collision detection and fail-safe features. The design incorporates elements to minimize radiation exposure of personnel carrying out recovery in the event of failure; an example of this is the steering system, which is based on all four wheels being mechanically/hydraulically linked so that the vehicle can be easily towed out of the collimation area in the event of a steering system or drive failure. The vehicle is fitted with radiation shielding panels at both ends to reduce radiation exposure if personnel need to intervene in the event of a breakdown during operation (see figure 10).

Remote collimator exchange crane
A separate project is currently looking into the remote disconnection of collimators, in particular the disconnection of the beam vacuum pipe flanges mentioned above. This work is tied in with the remotely operated vehicle described later in this paper.
6. LHC TAN remote mini-cranes
The TAN (Target Absorber Neutrals) remote mini-cranes, are two very compact, 100 kg capacity, remotely operated cranes that are used to exchange TAN detectors and shielding elements in the LHC tunnel on either side of the ATLAS experiment. The cranes are permanently installed in the LHC tunnel above the TAN shielding blocks that house the detectors and shielding elements. The space available for the cranes is extremely restricted; it was therefore necessary to design the mechanical components of the lifting mechanism from scratch, as commercially available mechanisms were too voluminous. As long as the detectors and shielding elements are inside the TAN shielding blocks, the ambient radiation levels are sufficiently low to make it possible to carry out pre-intervention preparation activities by hand.

TAN remote mini-crane lifting copper bar
Before carrying out exchange operations the cranes are equipped with cameras, and the remote control station, with its viewing screens, is connected to the crane. Separate free-standing pan-tilt zoom cameras are also positioned to provide an overview of operations. Shielded containers are brought alongside the TAN shielding block, ready to receive the radioactive components removed from the TAN. The remote control station is positioned behind shielding walls and the exchange operations are then carried out.

TAN remote mini-crane control station
7. Remote overhead travelling crane operation
In this chapter we describe two recent projects where remote techniques were applied to the operation of existing overhead travelling cranes in order to reduce radiation exposure of personnel carrying out the handling operations.
7.1 Decommissioning of neutrino facility
Remote techniques were used to greatly reduce radiation exposure during decommissioning of an old neutrino facility at CERN prior to its re-use as a material irradiation test area (HiRadMat). Preparation for remote operation included the design and development of remotely controlled load attachment and rotation devices to be suspended from the existing overhead travelling crane.
Remote viewing needs were studied, and a viewing system to allow fully remote operation was implemented. The viewing system was based on the use of cameras positioned on the crane, on the load attachment spreader beam, and also on free-standing supports. The mobile control station used for the TAN mini-crane (see section 6) was used for viewing. Initially, Wi-Fi was used to transmit the camera images to the control station, but this was replaced by optical fibre transmission in order to resolve problems encountered with delays in image transmission, which were a problem for the operators.
The dismantling was successfully carried out and the remote operation of the crane was one of many initiatives that contributed to a reduction in the radiation dose to personnel from a pre-optimization estimate of 210 mSv to 60 mSv [6]. The same remote techniques are used in the operation of the new HiRadMat test facility now installed in the tunnel.
7.2 Repairs in experimental hall
Lessons learned in the HiRadMat project were applied to a repair intervention in an experimental hall. The challenge was to remotely remove precision shielding blocks weighing up to 15 tonnes and their supporting lift tables in order to allow replacement of the lift table drive motors. Twelve tables needed to be repaired in this way and only six months were available for preparation for the intervention. After a feasibility study, the following work was carried out: modification of the overhead travelling crane to provide remote control of its movements; definition and installation of remote viewing cameras on the crane including on the lifting hook; design, build and test of remotely operated attachment and rotation devices to be fitted to the crane hook (see figure 13).

3-D studies of remote lifting equipment
The intervention was planned in collaboration with the groups responsible for the repair of the equipment, the operation of the facility and radiation protection. Mock-up testing was used to validate the operations before starting work in the radioactive area. The replacement of the motors was carried out manually once the tables had been transferred to a shielded area.

Remote crane operations control station
8. Remotely operated vehicle (ROV)
The projects described above are based on developments for specific tasks or facilities. In addition, CERN identified the need for a general-purpose, remotely operated vehicle to carry out a variety of tasks in several different radioactive areas of CERN's accelerator complex. The tasks include:
Remote visual inspection
Remote radiation dose-rate measurement
Remote manipulation of loads and dedicated tools
Provision of two-way audio communication between remote positions and the operator console.
As previously mentioned, accelerator equipment is often relatively fragile, and it is difficult to replace; the vehicle design and performance needs to ensure that the risk of damage to the accelerator due to operation of the vehicle is minimized. For these reasons it was decided that a relatively light vehicle would be preferable and therefore the load handling requirements for the vehicle's six-degrees-of-freedom manipulator arm were set at a minimum of 3 kg at 1.5 m from the turret centre in the horizontal plane.
The ROV will usually intervene in response to a breakdown or operational problem in one of the many different underground areas. In addition to the widely differing nature of the equipment to be worked on, constraints such as the space available, distances to be travelled and obstacles to be negotiated vary greatly from one intervention to the next. For example, the ROV must be able to negotiate the following:
Slopes – up to 20% on industrial grade concrete floors, even wet;
Vehicle loading ramps up to 40%;
Normalized steps and stairs;
Cables – must be capable of driving over cables between 3 and 40 mm in diameter, in random orientations, without damaging them;
Water – compatible with pools of water on the floor of depths up to 100 mm.
In view of the variety of tasks and environments, and considering the need to be able to intervene at short notice, the control approach selected is tele-operation (“man in the loop”) rather than autonomous robotic control.
A survey of commercially available vehicles was made, and selected vehicles were rented in order to carry out practical tests at CERN. During the rental period an urgent intervention was required to investigate a vacuum leak on a radioactive component. Using the ROV it was possible at short notice to carry out a visual inspection followed by leak testing using a helium probe. As a result it was possible to avoid the need for personnel to spend considerable amounts of time next to radioactive components for this painstaking task.
Following the trials, a Telemax ROV was purchased from Telerob (Germany). The Telemax has a base equipped with tracks, is capable of climbing stairs, and is fitted with a six-axis manipulator arm. The arm has some robotic capabilities, allowing the operator to select a tool mode of operation where the movements of the arm joints are combined to provide orthogonal movements of the gripper. The control station is portable and communication between the control station and the ROV is either by optical fibre or via radio.
The remote viewing requirements specified by the team responsible for the accelerator equipment are for colour images, and the image quality should permit the assessment of corrosion and small defects (0.5 mm at 50 cm). The vehicle is fitted with an on-board camera to allow this.

Telemax ROV
Two types of radiation survey are required:
General survey of a zone – for example following a path that runs parallel to the accelerator beam line.
Manipulation of a radiation dose–rate-monitoring probe to allow local point measurements to be taken. The ROV has to provide the necessary camera views to allow the operator to position the probe next to relatively delicate beam-line equipment. CERN will provide the radiation monitoring equipment.
Work is now underway to prepare for interventions during the forthcoming shut-down of CERN's accelerator complex. Preparation work will be mock-up-based to enable operators to practise and special tool developments to be tested. In addition, the mock-up trials will enable the persons responsible for the zone and the specific accelerator equipment involved to validate the intervention in terms of risk to personnel and equipment before the real intervention is carried out.
9. ACOL service vehicle refurbishment
The ACOL Service Vehicle was developed in the 1980s to handle targets and magnets in the antiproton target zone (loads ranging from 7 kg to 7 tonnes). It is essentially a very compact, custom-designed 7-tonne-capacity mobile crane equipped with remote control and viewing systems to allow remote operation.
The Service Vehicle offers the only means of changing radioactive elements in the Antiproton Decelerator, which is still in operation. To ensure the service vehicle's safety, reliability and availability at short notice, it is currently undergoing a full refurbishment, which includes replacement of the hydraulic systems and the control system using up-to–date technologies. The refurbishment includes work to ensure compatibility with modern safety standards and the provision of radio control rather than via the previous tether connection.

Service vehicle being lowered down access shaft (before refurbishment)
10. Other developments
Additional development work is being carried out that is not project-specific, but addresses issues that have been raised during the project work described above.
10.1 Viewing
A common aspect of many of the above projects is the need for good remote viewing systems. Work is underway to consolidate the lessons learned and establish a set of viewing system ‘building blocks’ ready for use in future interventions.
10.2 Communication
Communication between the control station and remote equipment is a particular concern in the accelerator tunnels. A Marie Curie Early Stage Researcher has been recruited to carry out research and identify optimal solutions for communication systems as part of the PURESAFE Initial Training Network funded by the EU.
10.3 Intervention planning
As mentioned above, interventions in radioactive areas have to be planned and optimized to reduce radiation exposure of personnel. This optimization process may conclude that a fully remote, a mixed remote and hands-on or a fully hands-on approach is most appropriate. In order to help with the optimization process, two research projects within the PURESAFE Early Training Network are aimed at developing software tools to be used during intervention preparation. One project is developing tools for 3-D visualization of radiation levels in accelerator areas; the other is developing optimization tools for higher-level planning of interventions.
11. Conclusions
Several projects have been or are being carried out and to apply remote techniques in radiation areas at CERN in order to reduce personnel radiation exposure.
The projects cover remote measurement, inspection and handling. The distances covered for inspection and measurement range from tens of metres to tens of kilometres; the loads handled remotely range from several kilogrammes to tens of tonnes. The remote systems developed are multi-disciplinary and include mechanical, pneumatic, hydraulic, electrical, electronic, and software elements.
The projects carried out over the last few years have helped build up a knowledge base and analysis, design, test and operation methodologies, as well as establishing equipment building blocks that can be applied to future projects.
While force reflection was implemented in the Mantis system used in the 70s and 80s, recent applications have not been able to make use of Mantis because of space and load constraints. Tele-operation interventions have therefore been restricted to handling operations requiring relatively low levels of dexterity. The new ISOLDE and Medicis robots will use pre-programmed handling routines – as was the case with their predecessors.
Remote handling projects have concentrated on tele-operation interventions during times when there are no particle beams in the accelerators; this means that the effects of radiation damage to electronics can be ignored for most interventions. For the ISOLDE robots the issue of damage to electronics has been addressed by locating the electronics outside the radioactive area. The electronic elements for the TAN mini-cranes are only taken into the radioactive area when the LHC beam is no longer circulating.
Safety issues are a large part of these projects, in view of the risks associated with radioactive environments and with the lifting of heavy loads in restricted spaces. A key lesson learned is that in addition to the engineering, research and development needed to ensure the systems meet their basic functional requirements, a considerable amount of work is needed to study failure modes and devise recovery techniques that will ensure that the main aim of these systems, i.e. radiation dose reduction, is achieved.
Remote handling techniques need to be considered when accelerator components and infrastructure are being designed. In particular by optimizing the design of interfaces with supports and connections, the associated remote handling equipment can be made simpler, thereby minimizing costs and risks of encountering problems and hence personnel radiation exposure.
The use of mock-ups has been a major contribution to efforts to reduce radiation exposure, as it allows problems to be identified before they occur in the accelerator tunnels. Mock-ups also promote communication between teams from different areas of the organization so that solutions can be agreed and implemented before entering the radiation area.
Footnotes
12. Acknowledgements
The authors wish to thank the members of the CERN EN-HE group, other members of the Engineering Department and members of CERN groups from other departments, including DGS-RP, IT-CS, BE-ABP and BE-OP, who have participated in and supported these projects.