
Abstract
This paper presents a passive dynamic walking model based on knee-bend behaviour, which is inspired by the way human beings walk. The length and mass parameters of human beings are used in the walking model. The knee-bend mechanism of the stance leg is designed in the phase between knee-strike and heel-strike. q* which is the angular difference of the stance leg between the two events, knee-strike and knee-bend, is adjusted in order to find a stable walking motion. The results show that the stable periodic walking motion on a slope of r <0.4 can be found by adjusting q*. Furthermore, with a particular q* in the range of 0.12<q*<0.18, the walker can walk down more steps before falling down on an arbitrary slope. The walking motion is more stable and adaptable than the conventional walking motion, especially for steep slopes.
1. Introduction
In the past decades, passive dynamic walking theory has made huge contributions to walking robots research. Since McGeer (1990) introduced his idea of “passive dynamic walking”, that a biped machine with no actuator and no control could walk stably on a shallow slope [1, 2], many institutes have succeeded in building successful walking robots developed from the passive dynamic walking theory. Grizzle (2008) constructed a novel biped robot, MABEL [3], which had springs that acted somewhat liked tendons in the human body for energy storage. Wisse (2009) designed the biped robot Leo [4], a fully autonomous platform that was especially suited for machine learning experiments. Cornell Ranger [5], the walking robot which was designed by Ruina (May, 2011), walked for 65.2 km non-stop on a single battery charge without any interference.
Compared with conventional powered walking robots [6, 7], constant control and actuation are not necessary for passive dynamic walking robots to achieve a stable walking motion [8–10]. Therefore, passive dynamic walking has two important advantages: inherent stability and high energy efficiency [11]. On the one hand, passive dynamic walkers can easily resist small disturbances with certain mechanical parameters [12]. No control is needed during walking. On the other hand, the energy efficiency of passive dynamic walkers is much higher than that of conventional walking robots [13–15]. For example, the cost of transport (COT) of Cornell Ranger is 0.28 which is similar to that of a human [5].
However, up until now, passive dynamic walkers have only been able to walk stably on slopes with a small slope angle [16–18]. It is hard for them to walk on a steep slope. This is mainly because the walking capacity of passive dynamic walkers relies on the mechanical structures and the walking mechanism. By analysing human beings walking down slopes, we found that there is a stance knee-bend process which could improve the stability of the walking. However, none of the existing passive dynamic walkers applied this knee mechanism to walking down slopes. To improve the ability of walking on slopes, most researchers would like to work on advanced control methods, rather than the walking mechanism. However, it would be more advantageous, for example, to design more efficient controllers with less stringent torque requirements [19], if this knee-bend mechanism could be studied using a completely passive dynamic method. The walking model could walk more stably on steeper slopes and adapt to more complex walking environments.
The goal of this paper is to investigate the passive dynamic walking motion based on knee-bend behaviour on slopes. We find the periodic walking motion by adjusting the bending time of the stance leg. In addition, we investigate the stability and adaptability of the walking motion, and make some comparisons with conventional walking motion.
2. Walking motion based on knee-bend behaviour
2.1 The walking motion
A five mass points and four sticks model is used to study this passive dynamic walking motion. Figure 1 shows a typical step in the walking motion. The walking step begins at the instant that the two legs are both on the slope, just after the stance foot hits the slope at the heel-strike and the swing foot is away from the ground (Figure 1. a). The swing thigh and shank continue their free swinging (Figure 1. b) until the swing knee-strike occurs (Figure 1. c). Then, the straight swing leg keeps swinging and the stance knee will be bent passively sometime after the swing knee-strike (Figure 1. e). The step ends with a heel-strike when the swing foot makes contact with the slope (Figure 1. f). A new step will begin after the heel-strike. The whole walking step is a periodic process whereby the initial condition of the model at the beginning of a new step is the same as that of the last step. Inherent in this are the assumptions that the collisions are instantaneous and perfectly plastic, and that the double support occurs instantaneously. We also assume that there is sufficient friction between the feet and the ground surface to prevent slippage during the whole walking process.
However, this mechanism of knee-bend has not been studied in conventional passive dynamic walking yet. The main difference between the new walking model presented in this paper and the conventional walking model is that the stance knee will be bent sometime between the knee-strike and the heel-strike in the new walking model, but the stance leg stays straight all the time between the knee-strike and the heel-strike in the conventional walking model. The knee-bend process could lead to a lighter heel-strike, which is probably the reason why the new model could perform a more stable walking motion on slopes.

A typical step of the passive dynamic walking motion based on knee-bend behaviour.
2.2 Analysis of the model
This five mass points and four sticks model is similar to a human's lower body which contains thighs and shanks (Figure 2. a). The five mass points are at the hip, on the thigh and the shank respectively, which characterize the mass distribution of the model. r is the slope angle. q0, q1, q2, q3 are the angles of the stance shank, stance thigh, swing thigh, and swing shank with respect to the normal line to the slope respectively. The whole configuration of the walking model can be described by the generalized coordinates q = (q0,q1,q2,q3)
T
which characterize the four degrees of freedom of the model. The walking model's condition qs can be described as follows:
The whole walking motion is analysed by the methods described in the Appendix, which contains the following aspects: A.1) Equations of motion, A.2) Knee-strike, A.3) Heel-strike, A.4) Constrained joint torques, A.5) Periodic walking motion.

Walking model based on knee-bend behaviour. (a) Model parameters; (b) Coordinates of the five mass points.
During the walking process of the knee-bend model, the stance leg is designed to be bent sometime between the knee-strike and the heel-strike (Figure 3). After the knee-strike, the straight stance leg and swing leg rotate in a forward direction. Then, the constrained torque in the stance knee is released at the instant of the knee-bend. The stance leg starts being bent. After the knee-bend, the model walks with the bent stance leg until the heel-strike. In our calculation we set the parameter q* to adjust the starting time of the knee-bend. When the stance leg rotates forward around the angle of q* after the instant of the knee-strike, the knee-bend process will start. If we define the angle of the stance leg at the knee-strike as qk, we expect the angle of the stance leg for the starting knee-bend to be qb. The following relation can be obtained, where qh is the angle of the stance leg which is still straight at the heel-strike.

The stance leg will be bent after the instant of the knee-bend. By choosing a particular q*, we can adjust the starting time of the knee-bend from the knee-strike to the heel-strike. If q*=0, then the knee-bend and the knee-strike happen at the same time; if q*= qh – qk, then there is no knee-bend in the walking process, which is a feature of the conventional walking motion.
The solution of periodic walking motion based on knee-bend behaviour includes the initial condition of the walking motion and the angle parameter q*. In the real walker design, the angle of the stance leg and the event of the knee-strike could be detected by sensors, such as encoders. The walker starts with the initial condition calculated in our simulation. The mechanical method is used to keep the stance leg straight at the start of the step [20]. When the knee-strike is detected by the sensors, the angle of the stance leg at the knee-strike qk is recorded. Then, after the stance leg rotates forward around the expected angle of q* (from the calculation), the knee-bend event is triggered. The stance knee is unlocked and the stance leg starts being bent. The step ends until the heel-strike is detected.

The knee-bend process after knee-strike.
Definitions of length and mass parameters of the model.

3. Periodic walking motion
The periodic walking motion based on knee-bend behaviour on slopes can be found using the model parameters from Table 2. The model parameters are chosen so that they correspond to the parameters of the human body [21]. On the one hand, using the parameters of the human body could help us make a comparison with the way human beings walk. On the other hand, it could help in the design of future human-like prototypes.
Parameters of the walking model.

The typical stable periodic walking motion for the slope angle r =0.35 (rad) was found when the setting was q* = 0.063 (rad) in our calculation (Figure 4 and Figure 5). Figure 4 shows the stick figure of this periodic walking motion. The step starts immediately after the heel-strike with a straight stance leg and a bended swing leg when both feet are on the slope. The initial condition of the step is shown in Table 3. When the swing knee-strike happens, the swing leg becomes straight. The three-links walking phase turns into the two-links walking phase with straight legs. Then, after the knee-bend, the two links phase turns into a new three-links walking phase with a straight swing leg and a bended stance leg. The step ends at the new heel-strike, where the model's condition will be converted into the identical initial condition for the next step (Table 3). Therefore, the step can be divided into three sections by the two events knee-strike and knee-bend. The swing leg is bent before the knee-strike and is straight after that; the stance leg is straight before the knee-bend and is bent afterwards.
The features of this periodic walking motion can also be found in Figure 5 which shows the non-dimensional angles and angular velocities of the stance thigh, the stance shank, the swing thigh and the swing shank in the periodic walking motion. In this one step process, we can find qk, which is the angle of the stance leg when the knee-strike occurs, is −0.381 (rad), and qb, which is the angle of the stance leg when the knee-bend occurs, is - 0.318 (rad).
This walking motion based on knee-bend behaviour looks like human beings walking on stairs. The velocity and step length of the new walking motion is much smaller than the conventional walking motion, but the new walking motion is more stable (discussed in Section 4.3). In order to find the periodic walking motion, we allow the swing foot to travel briefly below the slope during the walking process in our simulation. However, this assumption could be solved by designing stairs or adding actuators at joints in our further research. Figure 6 shows that the stance foot's normal force decreases sharply at the end of a step, which is caused by the knee-bend behaviour. However, the normal force is consistently positive during the walking process, which indicates that this periodic gait is a walking motion, since the stance foot is consistently on the ground, rather than a running motion.
The initial condition of the periodic walking motion, using parameters from Table 2 and r =0.35 (rad), q* = 0.063 (rad).


The stick figure of the periodic walking motion based on knee-bend behaviour.
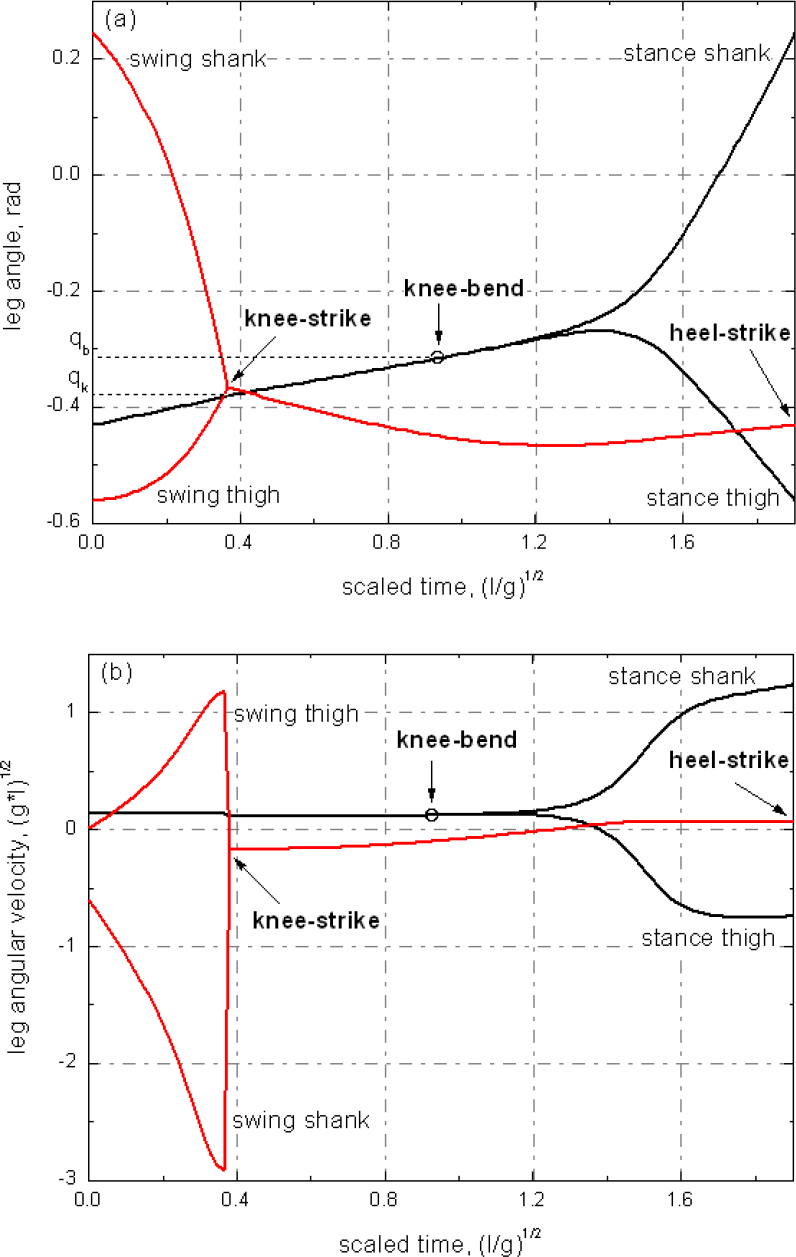
The periodic walking motion based on knee-bend behaviour. (a): angles of stance thigh, stance shank, swing thigh, swing shank, (b): angular velocities of stance thigh, stance shank, swing thigh, swing shank. The results are non-dimensionalized by scaling: time is divided by
4. Stability and adaptability discussion
4.1 Walking stability
A stable periodic walking motion requires that a certain initial condition (Table 3) at one step can repeat itself at all subsequent steps (see A.5 in Appendix). Even though there are some small disturbances during walking, the walking motion can still get back to the periodic walking solution after a few steps. The maximal absolute eigenvalue of the Jacobian (λmax) is usually used to determine the stability of the walking motion. If λmax is less than 1, the walking motion is stable. The smaller this value, the easier the walking motion is to control.
If λmax is bigger than 1, the periodic walking motion will be unstable. Since the λmax is considered as the multiplier of disturbance (A.5), beginning with a certain disturbance, the disturbance of the last step will be amplified by λmax at every subsequent step. So, for walking motions with a λmax which is bigger than 1, we can estimate how many steps the walker can walk before falling down. This estimation could provide a way of weighting the relative stability of the walking motion. We assume that if the disturbance is amplified up to the same order of magnitude of the maximal angle of the legs, the walker will fall down. Therefore, as the step number increases, the disturbance is amplified by λmax at every step. If the following relation is met, we consider that the walker will fall down.
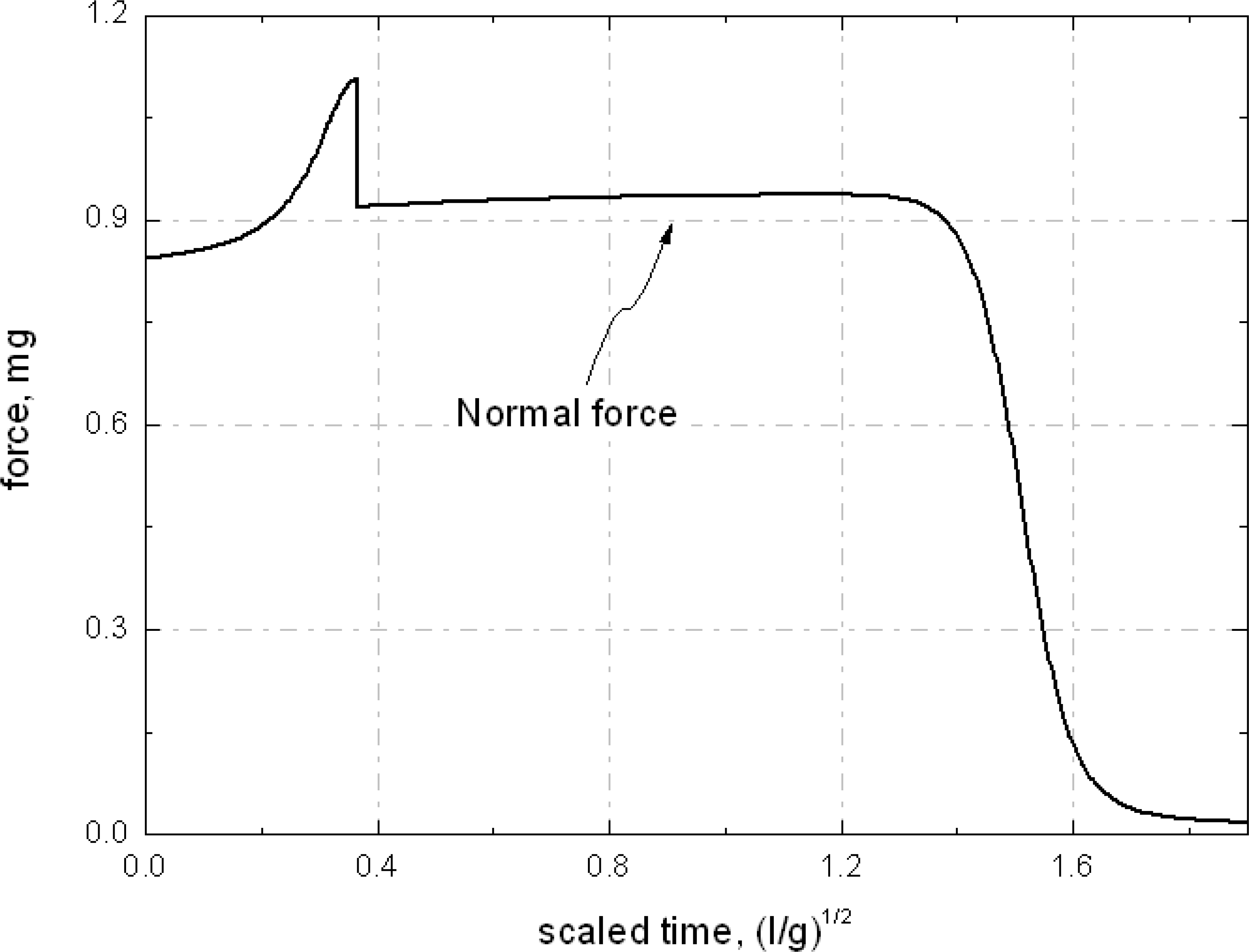
The normal force at the stance foot in one step of the walking.

The maximal absolute eigenvalues of the Jacobian (λmax) versus the angular difference of stance knee between knee-strike and knee-bend (q*) with the slope of 0.35 (rad). If λmax is less than 1, the walking motion is stable. The right end of the curve (q*=0.82 (rad)) means that the stance leg is still straight when the heel-strike occurs, which is the conventional gait design.

where qm is the maximal angle of the legs, δq is the disturbance at the beginning of the walking motion, Ns is the number of steps the walker can walk before falling down.
If the disturbance δq is scaled by the maximal angle of the legs, from relation (2), we have the following relation to calculate Ns, where δq̄ is the scaled disturbance equal to δq/qm.

Subsequent steps started with a scaled disturbance of 10−3 (r=0.35 (rad), q* =0.15 (rad)).

For our walking model, we have found the stable periodic walking motion on a range of slopes by adjusting q*. Figure 7 shows that when q* is in a small region around 0.063 (rad), the λmax is less than 1. The walking motion is very stable with q* in this region. When q* is at the left side of this stable region, the λmax is very big and the walking motion is unstable, but when q* is in the region between the right side of the stable region and less than 0.19 (rad), the λmax is less than 2 which is small, and the curve is almost flat. We call this region the “acceptable region” which means that if q* is in this region the walking motion is relatively stable. The walking is easily controlled by actuators. From relation (3), the number of steps before falling down can be estimated. For example, theλmax is 2 at q* =0.15, if it begins with a scaled disturbance δq̄ of 10−3, the walker can walk 10 steps before falling down (Figure 8).
4.2 Walking adaptability for slopes
The stable periodic walking motion based on knee-bend behaviour on a range of slopes (r<0.4 (rad)) can be found with a different region of q* and the parameters of human beings from Table 2. The values of λmax in the stable walking region in Figure 9 are less than 1, which means that for a certain slope, we can find a small region of q* where λmax <1. The periodic walking motion with this region of q* is stable. For example, when walking on a slope with r=0.35 (rad), the stable periodic walking motion can be found by adjusting q* in the region of [0.062, 0.066]. Figure 10 shows the initial conditions of the model walking on a slope with a different slope angle. When walking on a steeper slope, the swing leg is bent more and the angle of the stance leg is bigger.
For the region of slopes with r<0.4 (rad), we all can find the “acceptable region” (presented in Section 4.1) of q*, in which the λmax is bigger than 1 but small and the curve is almost flat. Especially for a certain q* in the region of [0.12, 0.18], the acceptable region of all slope conditions can be included. It indicates that when walking with a certain q* in this region, the walking motion on an arbitrary slope in the slope range is relatively stable. The walker with the new gait can walk more steps than the conventional gait. For example, choosing q*=0.16 which means the knee-bend happens when the stance leg rotates 0.16 (rad) forwards after the knee-strike, the λmax is around 2 for walking on any of the slopes. The number of steps before falling down can be calculated by: Ns = log2(1/Δq̄). If it starts with a scaled disturbance of 10−3, the model can walk around 10 steps before falling down without any control on an arbitrary slope.

The relationship between stability and q* with the slope of r<0.4 (rad).

The initial condition of the model walking on slopes with different slope angles.
4.3 Comparison with the conventional walking motion
In contrast with the angle region (r<0.4 (rad)) for which the new model could provide stable walking motion, the stable conventional walking motion can be found with the slope angle 0.19<r<0.21 in our calculation. The λmax of the conventional walking motion in this region is less than 1 (Figure 11). However, the λmax will be bigger than 1 when r>0.21 (rad) and increases with the increase of the slope angle. The conventional walking motion begins to be unstable. When r<0.19, we do not find a periodic solution from the conventional walking motion.
In addition, the normal force at the stance foot has been checked to see whether the stance foot leaves the ground or not. We have found that the normal force at the moment just before the heel-strike is minimal in a single step of the walking, which is probably because of the centrifugal force generated by the rotation of the stance leg. Figure 11 also shows that the minimal normal force of the conventional walking motion decreases with an increase in the slope angle and will be negative when r>0.28 (rad). So, the stance foot of the conventional walking will leave the ground when r>0.28 (rad) and the walker will switch to running. However, the minimal normal force of the new model is greater than 0 when r<0.4 (rad). Figure 6 shows that the minimal normal force of the new model with an angle of r=0.35 is 0.02.

The λmax (left) and the minimal normal force in one step (right) of the conventional walking motion versus the slope angle.
The subsequent steps of the two walking motions which began with a small disturbance on a slope of r=0.27 (rad) are shown in Figure 12. The new walking motion which began with a scaled disturbance of 10−3 is stable (Figure 12 (d)). However, the λmax of the conventional walking motion with r= 0.27 (rad) is 5 (Figure 11), which indicates that the conventional walking motion is very unstable. The conventional walker can easily fall down with a small disturbance (Figure 12 (a), (b), (c)). The number of steps before falling down for the conventional walking motion can be approximately estimated by Ns = log5(1/Δq̄). For example, the scaled disturbance of 10−3 will lead to falling down after five steps of walking (Figure 12 (a)).

Subsequent steps started with the initial condition near the periodic walking solution (r=0.27 (rad)). (a),(b),(c) is the conventional walking motion which began with a scaled disturbance (δq̄) of 10−3,10−6,10−10, respectively. (d) is the new periodic walking motion of our model (q*=0.087 (rad)), started with a scaled disturbance (δq̄) of 10−3. In (a), (b), (c), the walker can walk five, nine, and 13 steps before falling down, respectively.
From Figure 13 & Figure 14, we can find that both the step length and the walking velocity of the new walking motion are smaller than the conventional walking motion. The step length of the conventional walking motion increases while the step length of the new walking motion decreases slowly with the increase of the slope angle. The walking velocities of both walking motions are almost constant with different slope angles. However, the conventional walking motion is unstable when r>0.21 (rad) (Figure 11). From the perspective of energy consumption, the unstable conventional walking gait needs more additional energy to improve the walking stability. If we put actuators on the model, controlling the new walking motion will be more efficient and easier. Since passive dynamic walking processes exist in the way human beings walk [22], this means that if human beings walk down a slope using the conventional walking gait with a longer step length, the walking would be faster but would cost more energy to improve the stability. However, if the new walking gait was used, which is like the way human beings walk on stairs, the walking would consume less energy and would be more efficient.
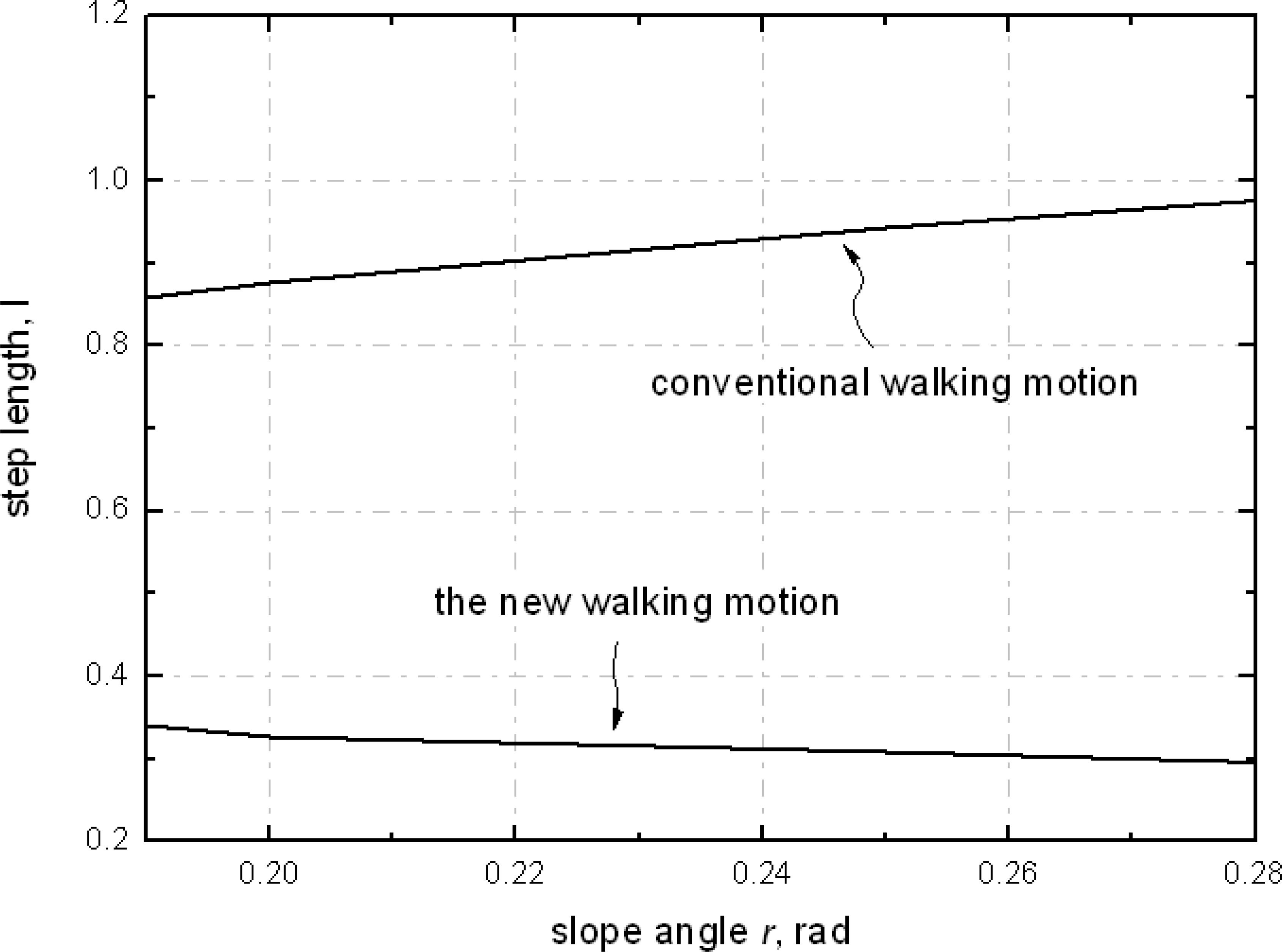
Comparison of the step length of the two walking motions
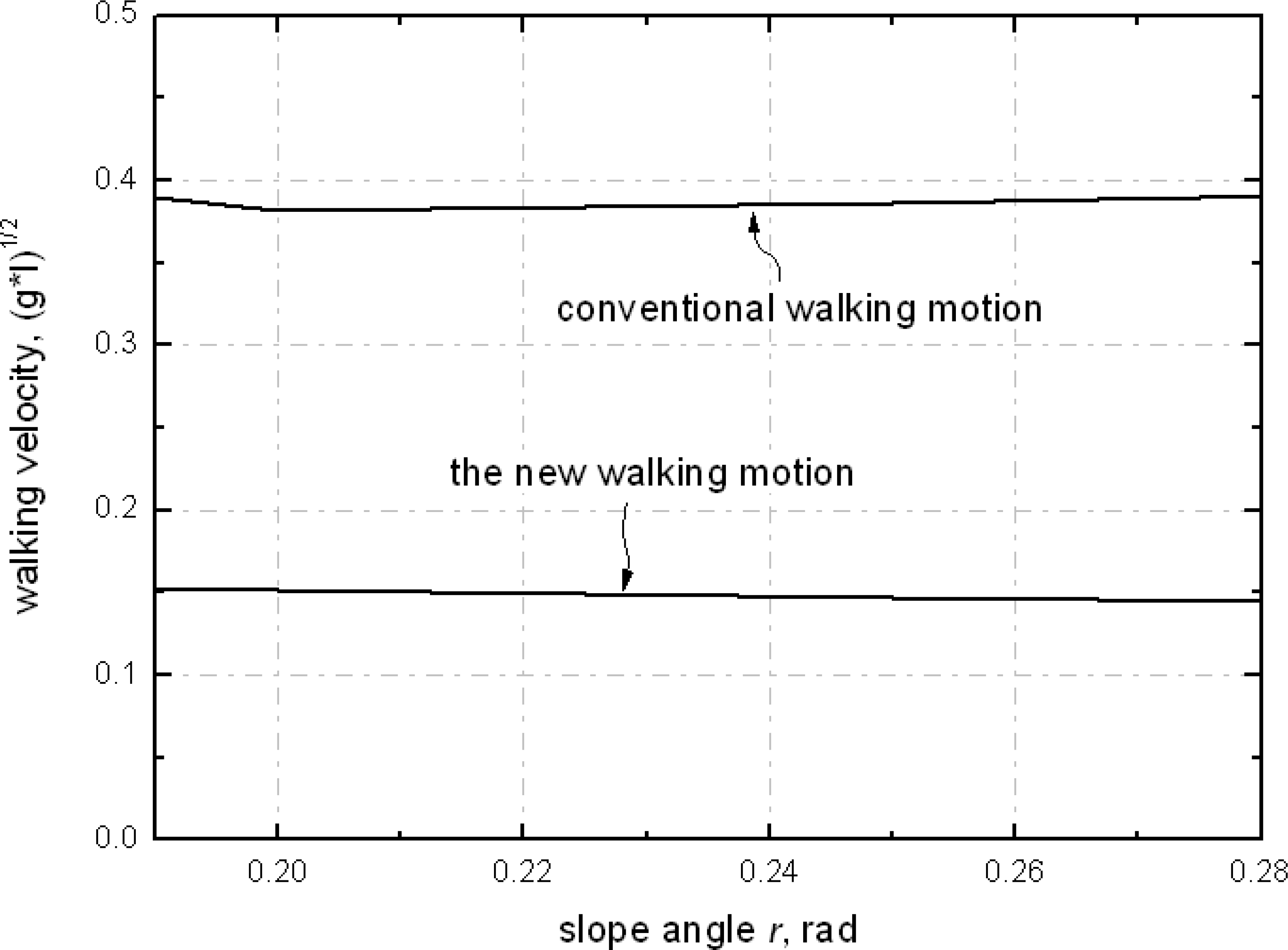
Comparison of the walking velocity of the two walking motions
5. Conclusions
This paper presents a walking model based on knee-bend behaviour, which imitates the way human beings walk. The walking motion includes three events: knee-strike, knee-bend and heel-strike. A stable periodic walking motion can be found by adjusting q* which is the angular difference of the stance leg between the knee-strike and the knee-bend.
The stability of the proposed walking motion is determined by q*. When q* is in the “stable walking region”, the walking motion is stable. When q* is in the “acceptable region”, the walker can walk more steps before falling down on an arbitrary slope. The walking motion is more stable than the conventional walking motion on the same slope.
The adaptability of the proposed walking model to different slopes is much better than the conventional walking model. The proposed model can provide stable walking on a much wider range of slopes, especially for steep slopes.
In designing real walkers, the proposed walking model needs less energy for stability. It is more efficient and easier to control than the conventional walking model. These results support the claim that our walking model based on knee-bend behaviour might be a meaningful means for understanding the knee-bend mechanism in bipeds walking on slopes. It could also help in the building of biped prototypes for walking on complex terrain.
Footnotes
11. Acknowledgments
Thanks to Professor Andy Ruina for a lot of help in this research. This work is supported by the National Natural Science Foundation of China (No. 61203344), the National Natural Science Foundation of China (No. 91120308), the International Technology Cooperation Program (No. 2010DFA12210), Shanghai Technical Personnel Program (No. 11XD1404800), and the Key Program for the Fundamental Research of Shanghai Science and Technology Commission (No. 12JC1408800).