
Abstract
There are approximately 6,677,000 apartment housing units in South Korea. Exterior wall painting for such multi-dwelling apartment housings in South Korea represents a typical area to which construction automation technology can be applied for improvement in safety, productivity, quality, and cost over the conventional method. The conventional exterior wall painting is costly and labor-intensive, and it especially exposes workers to significant health and safety risks. The primary objective of this study is to design a conceptual model of an exterior wall painting robot which is applicable to apartment housing construction and maintenance, and to conduct its technical·economical feasibility analyses. In this study, a design concept using a high ladder truck is proposed as the best alternative for automation of the exterior wall painting. Conclusions made in this study show that the proposed exterior wall painting robot is technically and economically feasible, and can greatly enhance safety, productivity, and quality compared to the conventional method. Finally, it is expected that the conceptual model of the exterior wall painting robot would be efficiently used in various applications in exterior wall finishing and maintenance of other architectural and civil structures such as commercial buildings, towers, and high-rise storage tanks.
Introduction
Most of the architectural buildings with concrete exterior walls are finished with paint, unless marbles, bricks, or curtain walls are used as exterior enclosures. In South Korea, the most popular residential type is multi-dwelling apartment housings (12 to 25 story-building) and most of them are built with concrete wall enclosures finished by paint. The concept for apartment housing in South Korea is similar to the one of condominium in North America where multi-dwelling units share stairs, elevators, and some common structures, while each apartment unit is owned separately.
Owners or tenants generally form a home owners association to get services during a certain period of time from builders and to maintain their units during the service life.
In South Korea, the apartment housing has spread to the suburbs of the large cities, where gardens, tennis courts, and children's playgrounds are included for communities. A phenomenal increase in construction of apartment housing has taken place since 1990 in all large cities, reaching a peak in Seoul, where many individual houses are largely replaced with apartments (Kim, Y. et al., 2007). The Korean national statistical office (2005) reported that the total amount of contracts in apartment housing construction was 84 billion dollars which was 62% of the total residential building construction cost in South Korea in 2005, while it was only 42 billion dollars for home building construction. Because of such a strong demand and preference, there currently exists over 6,000,000 dwelling units living in apartment buildings and approximately 412,100 dwelling units of apartment buildings are being annually constructed in South Korea. When considering the exterior walls in both new and existing apartment buildings needed to be newly painted or periodically maintained, and painting volumes in other architectural and civil structures, it is expected that the demand of exterior wall painting would be very high. In such apartment housing construction and maintenance, the conventional exterior wall painting is a relatively simple task that various colors are applied to four-sided exterior walls of the building. Some graphic works such as drawings, contractors' logos, and texts (e.g., building numbers) are also added to the painted wall. However, this conventional exterior wall painting is costly and labor-intensive, and especially workers are exposed to significant health and safety risks. In the conventional exterior wall painting, a painter is hanging down from a rope fasten to somewhere in the rooftop and paints the wall with a spray gun or a roller while swinging from side to side like a clock pendulum and coming down from top to bottom (Fig. 1). In such a high altitude with a simple connection to a single rope, the painter can be led to a fatal accident even with a small mistake.

Conventional Exterior Wall Painting Work (Kim, Y., 2004)
Due to such a dangerous work environment and higher accidental rates (Hinze J. et al., 2002, Kim Y. 2004), it is difficult to retain skilled workers and their daily labor cost is higher than that of other construction crews. In addition, it is not easy to obtain consistent quality of the painting because of the unstable working position and movement of the worker thus yielding a big difference in productivity in accordance with the level of worker's skill and experience in the exterior wall painting. A site survey result conducted in this research also indicates that the total labor expense is generally four times higher than the sum of materials and indirect costs required for exterior wall painting in apartment buildings. Furthermore, the labor cost would be even greater when graphic specialists are hired to add graphic works such as artistic drawings, logos, and texts.
This study first identifies a conventional process of exterior wall painting in apartment housing construction and maintenance, and its problems. Previously developed exterior wall painting robots and primary considerations including key technological elements required for automating exterior wall painting are also identified in this study. This study then illustrates three conceptual ideas suggested for the development of an exterior wall painting robot and performs their technical feasibility analysis using Analytic Hierarchy Process (AHP). Based on the results, it proposes a conceptual model of the apartment building exterior wall painting robot to be developed. Then, the authors analyze economic feasibility of the automated method in an effort to verify the benefits gained from the Exterior Wall Painting Robot (EWPro) through the comparison with the conventional method. A software program named as “Economic Feasibility Analyzer (EFA)” has been developed in order to quantitatively evaluate the economic feasibility of the automated method. Finally, conclusions and recommendations are made.
Conventional Exterior Wall Painting Process and Its Problems
Conventional Exterior Wall Painting Process
The conventional exterior wall painting process which is identified through the analysis of various specifications and field surveys is as follows:
1) Helpers set up an airless pump, a spray gun, a rope, and paint. 2) When the job preparation is completed, helpers fasten one end of a rope to somewhere in the roof top. 3) Once the rope is fastened, helpers then install a saddle where a painter sits to work. 4) The painter sits and installs a spray gun or a roller. 5) The painter paints an exterior wall with the spray gun or the roller while swinging from left to right (or right to left) like a clock pendulum and coming down from top to bottom after painting each row. 6) After painting one side of the building, the painter comes down to the ground and then goes back to the roof top of the apartment building. In the mean time, helpers unfasten the rope and move to the next location to refasten the rope. These processes are repeated until the painting work for all exterior walls of the apartment building is completed. 7) Once exterior wall painting is completed, graphic workers perform the required art works to finally complete the exterior wall painting (Fig. 2).

Conventional Exterior Wall Painting Work Process (Kim, Y., 2004)
A field survey result indicates that labor cost consists of about 80% of the total exterior wall painting cost when the conventional method is used. The problems in the conventional exterior wall painting process are identified as follows:
Safety
In general, exterior wall painting is conducted using a spray gun for a higher productivity rate rather than using a roller. Due to the high pressure of the spray gun, there always exists a high danger of cutting fingers (Park, J., 1999). Also, painters should wear a safety helmet, a dust protection mask, and a pair of protective glasses. However, they often do not properly wear such safety gears because they feel uncomfortable with such gears to do a fine painting job. Also, utilizing a rope is preferred over the use of scaffolding due to its cost-effectiveness and higher productivity. However, there is higher possibility for the painter at heights to fall down by a small mistake or an unstable work posture when a single rope was used rather than scaffolding. Korean ‘Painting Work Specification’ specifies the use of a secondary rope to prevent accidents, but the field survey showed that most of painters do not use such a secondary rope in practice due to its cumbersomeness and lower productivity rates. Fig. 3-(a) shows several potential safety concerns in the exterior wall painting process.
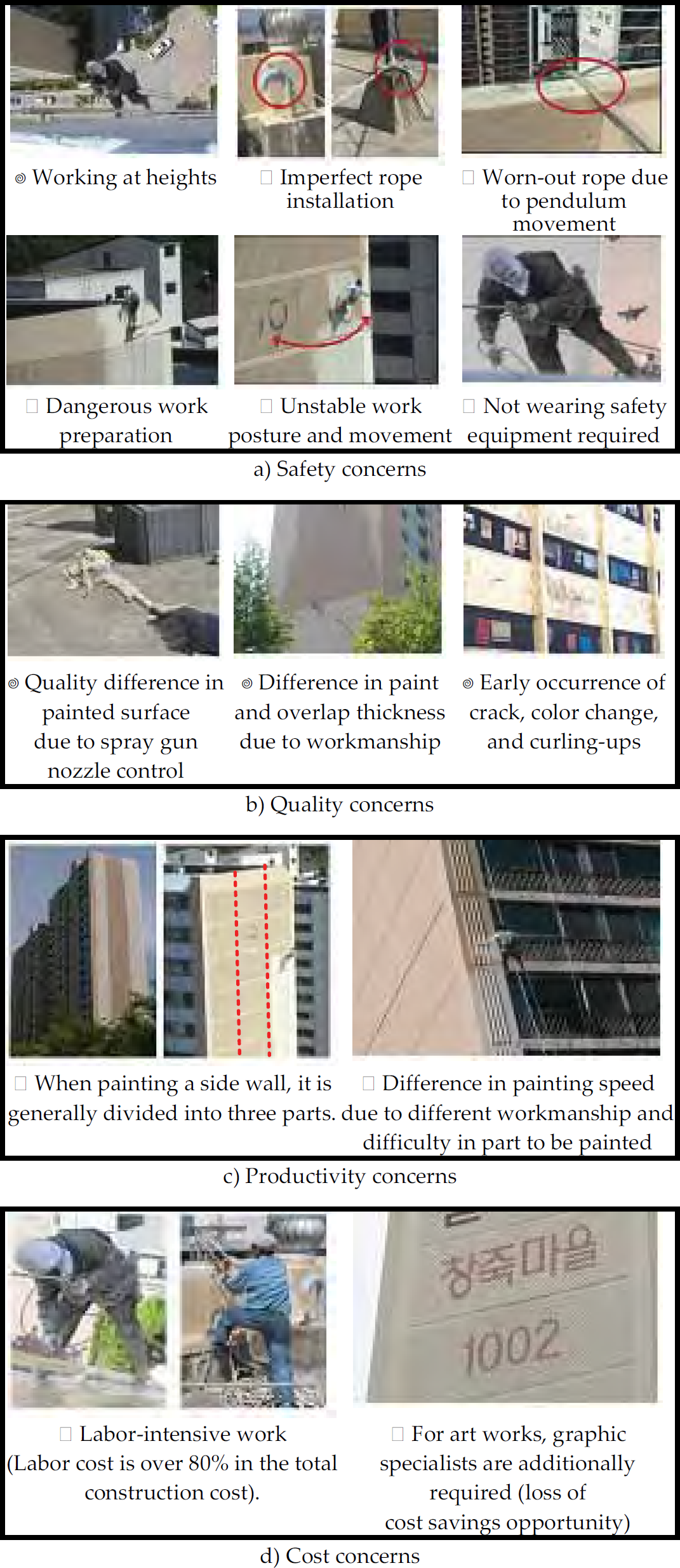
Concerns in Conventional Exterior Wall Painting (Kim, Y., 2004)
In general, painting quality is determined by painter's workmanship. Good workmanship appropriately controls the amount and thickness of sprayed paint. In this study, the difference of thickness is identified as a source of the problems such as occurrence of crack, color change, and curling-ups (Fig. 3-(b)).
Productivity
Through the observation of actual painting work on apartment building, it is found that a painter can paint about 1/3 of the wall width at a time due to the limitation of rope movement. After finishing one of three vertical sections, the painter goes back to the apartment top and moved to a next vertical section and repeats the same painting process. This sectional painting process repeats until all sides of building are completed. It is analyzed that overall productivity varies based on each painter's workmanship and experience (Fig. 3-(c)).
Cost
The conventional exterior wall painting is a labor-intensive work which requires about fourteen laborers for painting one apartment building. Compared to other types of construction trades, the daily wage of exterior wall painters is relatively high because of the dangerous working environment. A field survey result indicates that labor cost is over 80% of the total painting cost. Thus, it is expected that there would be a significant saving in the total painting cost if the number of laborers is reduced by automating the wall painting process. Also, painting contractors usually subcontract the graphic works such as drawings, logos and texts to a specialist in executing the conventional exterior wall painting, which increases the painting cost (Fig. 3-(d)).
Work Volumes of Exterior Wall Painting
According to the analysis of apartment housing statistical data published by the Korea Ministry of Construction and Transportation, there are approximately 6,677,000 apartment housing units in South Korea (as of Dec. 31, 2004). About 83% of the apartment housing dwelling units, 5,539,000 dwelling units, are living in more than six story apartment buildings. When considering four dwelling units per floor and 15 stories per building which are the most common in South Korea, it is assumed that that the number of apartment buildings would be approximately 92,316. Since such existing apartment buildings are periodically painted for maintenance in every 3 to 5 years, and about 412,100 dwelling units of apartment are being annually constructed in South Korea, the huge volume of exterior wall painting can be expected.
Related Research
During the last decade, several tele-operated systems have been developed to automate exterior wall painting and surface finishing work processes. Key technical and functional elements of the developed systems are described as follows:
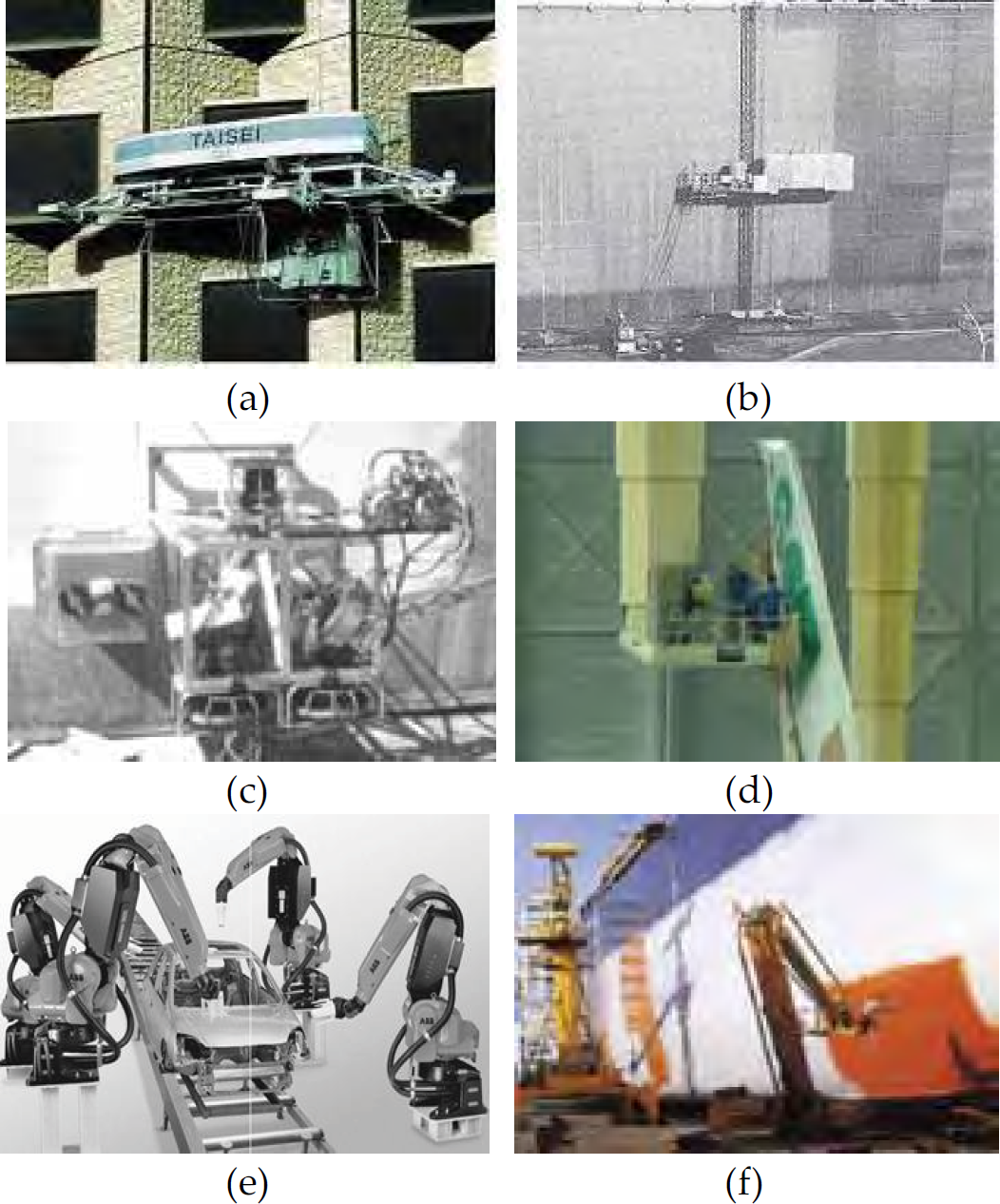
Taisei Construction in Japan developed an exterior wall painting robot which is applicable to high-rise office building structures. It automatically paints the exterior walls moving vertically using a rail system installed on exterior walls of the office building (Fig. 4-(a)). The speed of the exterior wall painting robot in vertical movement is about 100m2/h which is relatively fast. However, horizontal movement of the robot on exterior walls of building was not considered in this development. Thus, the robot should be demobilized and mobilized after it completes one vertical section of the exterior wall, which leads to a lower productivity. Also this exterior wall painting robot can be applied only to a specifically designed and modularized building facade. However, some of concepts used for maintaining a uniform painting thickness and vertically moving along exterior walls of building can be adapted to the wall painting robot development proposed here.
Examples of Surface Painting Systems Developed for the Use in Construction and Other Industries (Kim, Y., 2004) Kajima Construction in Japan developed an exterior wall painting robot using a vertical mast and a horizontal crossing rail (Terauchi, S. et al., 1993). To perform the exterior wall painting work, the robot vertically moves and horizontally transverses along the mast and the crossing rail which are installed to an exterior wall of building (Fig. 4-(b)). This robot uses an ultrasonic sensor which enables the robot to maintain a certain distance between a paint spray gun and a wall surface to secure a uniform painting thickness. However, it was estimated that this robot would require excessive time for installing the mast and the crossing rail on each side of the building wall, thus significantly decreasing its overall productivity. The University of Texas at Austin developed an automated surface finishing system for use on large diameter storage tanks (Fig. 4-(c)). The system was comprised of a control station and a remotely operated cart. The cart attached to the tank wall was designed to blast and paint the vertical exterior areas that are not restricted by pipes, stairs, or other structures. The control station is located on the ground to remove the operator from the hazardous conditions at the tank surface (Daily C. et al., 1993). It was expected that this basic technology can be extended to other large structures such as water towers and ships, but this system would not be applicable to a tall apartment building. There would be safety and quality concerns in controlling this system under windy weather conditions because it performs surface finishing works while hanging on a tank surface by winch cables. Fig. 4-(d), (e), and (f) also show examples of several surface painting systems which are developed in aircraft, automobile, and ship manufacturing industries, respectively.
The results of literature reviews on existing exterior wall painting systems show that such systems are unique and they can be practically used to paint specific structures. However, it was concluded that the existing systems would not be applicable for apartment building exterior wall painting work. It is because the shapes of apartment building structures considerably vary in floor plans and building facade designs (Fig. 5-(a), (b), (c), (d), (e), and (f)). Therefore, if a robot is to be developed to automate the exterior wall painting, it should be guaranteed that the robot can effectively paint the exterior walls in any shapes of building structure as shown in Fig. 5. It is thus concluded that there is still a need for a new type of exterior wall painting robot, when considering the limitations of current surface painting systems and the extremely large work volume expected for the new construction and periodic maintenance of apartment buildings.

Various Shapes of Apartment Building Exterior Wall
General Considerations
The exterior wall painting robot proposed in this study should be applicable to the existing apartment buildings for the periodic maintenance in every 3 to 5 years and new apartment buildings. In this study, the general considerations required for the development of the exterior wall painting robot were mainly derived from the recently constructed apartment buildings whose roof shapes, floor plans, and exterior wall shapes are diversified and complicated. In terms of work efficiency, spray guns instead of brushes or rollers should be used to improve productivity of the exterior wall painting. The exterior wall painting in apartment buildings generally starts with masking balcony rails and/or any exterior parts with plastic sheets or cloths (Fig. 5-(a)). In this study, a detailed analysis of roof shapes, floor plans, and exterior wall shapes of apartment buildings was performed in an effort to derive a design concept for easy installation and movement of the robot on building exterior walls. Followings are the general considerations required for installation and movement of the exterior wall painting robot:
Typically, the existing and new apartment buildings have flat or gable roof shapes (Fig. 5-(b), (c), and (d)). Thus, an exterior wall painting robot should be designed to be quickly and easily mobilized and demobilized on such flat and gable roof structures, Even in a same apartment building, its building height may be partly different (Fig. 5-(c) and (d)). Also, there exist various shapes of exterior walls in accordance with different floor plans and exterior designs as well as local laws and building codes. For example, Figures 5-(e) and (f) shows extruded or cave-in (
 ) exterior wall (or shell) design. Therefore, the painting robot should be designed to flexibly cope with such varying shapes of exterior walls as well as building heights.
) exterior wall (or shell) design. Therefore, the painting robot should be designed to flexibly cope with such varying shapes of exterior walls as well as building heights.
Key Technical Considerations
There are several key technical considerations (design issues) which should be explored in the planning and design phases for the development of exterior wall painting robot. Such key design issues include: 1) How to stably install, and vertically and horizontally move the robot on various shapes of apartment building exterior walls and 2) how to design a painting head of the robot in terms of productivity and quality improvement. 3) Other considerations would include the reviews of enabling technologies which can recognize any openings and perform any graphic works on the exterior walls (Kim, Y., 2004).
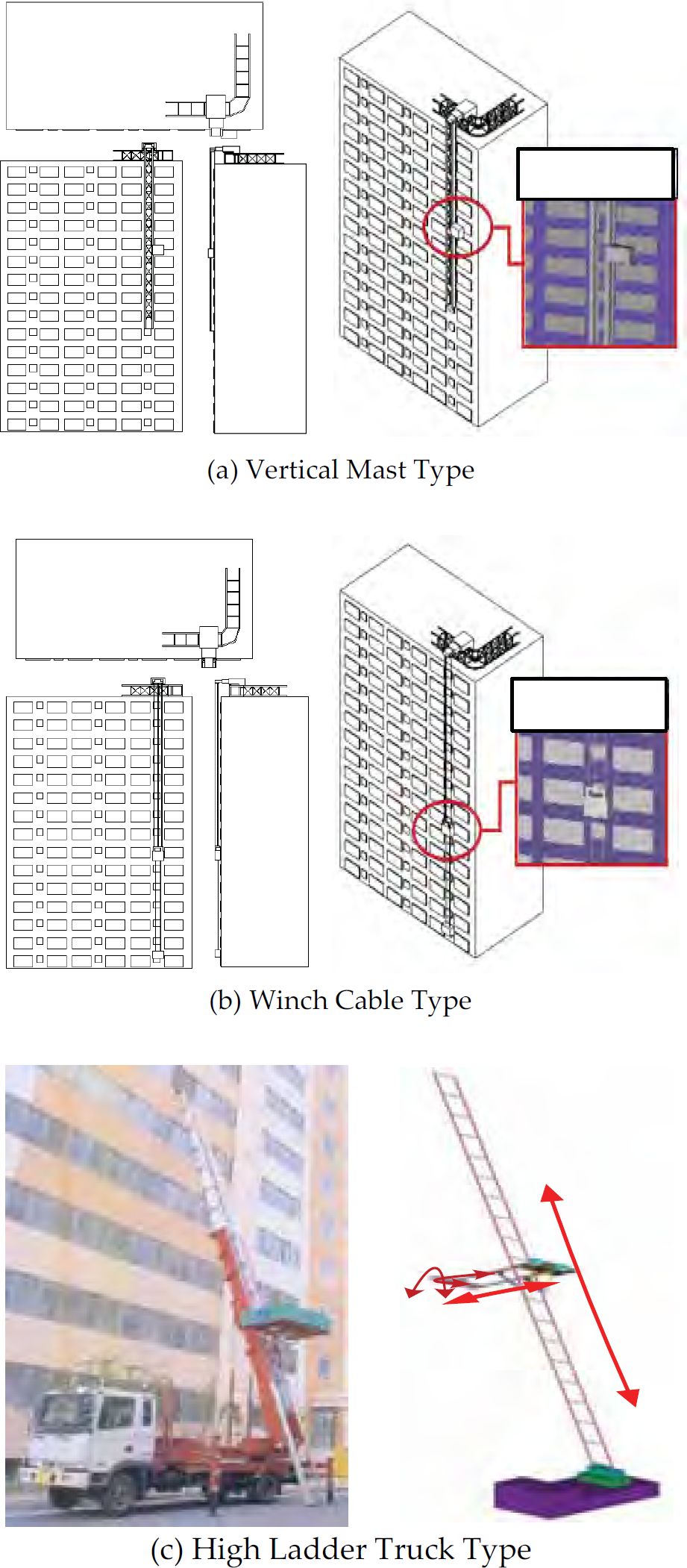
In this study, three conceptual ideas using a vertical mast, a winch cable, or a high ladder truck (Fig. 6) have been suggested based on the results of the related research projects and through technology reviews. A vertical rail utilized by Taisei Construction (Fig. 4-(a)) was not considered as an alternative because the vertical rail was specially designed as a part of permanent building system to automate the painting process, which cannot be used temporarily for other buildings. In this study, advantages and disadvantages of each conceptual idea are qualitatively described and the best alternative for automation of apartment exterior wall painting is then suggested. In an effort to determine the best alternative, the authors utilized the ‘automation needs determination method’ using AHP proposed by Guo and Tucker (1993).
Conceptual Ideas of Exterior Wall Painting Robots Using a Vertical Mast, a Winch Cable or a Ladder Truck
Fig. 6 shows the three different conceptual ideas using a vertical mast, a winch cable, or a high-ladder truck. As aforementioned in Section 2.3, the technologies using vertical masts and winch cables have been applied to the painting robots developed by Kajima Construction and University of Texas at Austin. Such control mechanisms for installing, positioning, and moving a painting robot on a rooftop and a vertical plane would be ideal if they are applied to a flat exterior wall which does not include any irregular ( ) surfaces on its vertical plane, which leads to limitations in the robot control and manipulation. For example, using a vertical mast or a winch cable will not be suitable particularly for the apartments with gable roof structures or partly different floor levels in a same building (Fig. 5-(c) and (d)). Although the concept of the vertical and horizontal mast developed by Kajima Construction (Fig. 4-(b)) can be used for the apartment building exterior wall, there would be great concerns in its overall productivity due to the excessive time required for its mobilization and demobilization, and limited applicability to various shapes of exterior walls (Fig. 5-(f)). In contrast, it is expected that a design concept using a high ladder truck (Fig. 6-(c)) can be flexibly applied to the apartment buildings with various shapes of roof structures and exterior walls. Compared to a vertical mast or a winch cable, the design concept using a high ladder truck can ensure a better stability control, fast installation, and more flexible vertical and horizontal movements on the exterior walls with the various shapes of surfaces or the different floor levels regardless of roof design types.
) surfaces on its vertical plane, which leads to limitations in the robot control and manipulation. For example, using a vertical mast or a winch cable will not be suitable particularly for the apartments with gable roof structures or partly different floor levels in a same building (Fig. 5-(c) and (d)). Although the concept of the vertical and horizontal mast developed by Kajima Construction (Fig. 4-(b)) can be used for the apartment building exterior wall, there would be great concerns in its overall productivity due to the excessive time required for its mobilization and demobilization, and limited applicability to various shapes of exterior walls (Fig. 5-(f)). In contrast, it is expected that a design concept using a high ladder truck (Fig. 6-(c)) can be flexibly applied to the apartment buildings with various shapes of roof structures and exterior walls. Compared to a vertical mast or a winch cable, the design concept using a high ladder truck can ensure a better stability control, fast installation, and more flexible vertical and horizontal movements on the exterior walls with the various shapes of surfaces or the different floor levels regardless of roof design types.
Currently, it is possible to develop a high ladder truck which can reach up to 30 story-apartment building. When considering that an average floor level of apartment buildings in South Korea is less than 20 stories, the development of an exterior wall painting robot using the high ladder truck would be highly acceptable.
In the planning and design phases of the exterior wall painting robot, the design of painting head is also an important factor since its result would eventually have a significant effect on the overall performance of the robot in terms of both productivity and quality. The multi-nozzles would be essential to maximize productivity of the automated method. To ensure an effective painting on various shapes of floor plans and exterior walls, the robot should be able to vertically and horizontally move along a vertical plane and its painting head with the multi-nozzles needs to be yawed and rolled as well (Fig. 6–(c)).
Selection of the Best Alternative Using AHP
In this study, the authors also examined the applicability of the three conceptual ideas using ‘automation needs determination method’ using AHP. The AHP was developed by Saaty in the 1980‘ and has been utilized in broad application areas such as decision making (Hastak M., 1994 and 1996), resource allocation, and optimization (Guo, S. & Tucker, R., 1993). A detailed description of the basic procedure involved in AHP is illustrated elsewhere (Saaty J., 1980). To achieve a weight for each factor (safety, productivity, quality) shown in Table 1, a questionnaire was distributed to authors and experts of apartment building exterior wall painting. The comparison scales filled in the comparison matrix shown in Table 1 was determined by discussion and judgment based on the replies of the questionnaire. In this study, the hierarchy structure for design concern to be considered in developing the exterior wall painting robot with sub-factors is shown in Table 1 and 2. The sub-factors for each design concern (factors) were derived from the analysis results of the general and key technical considerations. By comparing the factors (safety, productivity, and quality) in a matrix format, a priority vector shown in Table 1 could be derived through the mathematical procedures of AHP. The critical ratio (CR) was estimated as 5% which indicates that a good consistency was reached. The resultant weight shown in Table 1 implies that productivity is the most critical factor in proposing the conceptual designs and determining the best alternative.
Assessment of Weights using AHP

Assessment of Weights using AHP
1: Two factors contribute equally, 2: Slightly favor one factor over another, 3: Moderately favor one factor over another, 4: Strongly favor one factor over another, 5: One factor dominates another
Table 2 shows the estimated result of Automation Preference Index (API) for suggested each conceptual idea. To reach a final API index, a value of ‘O’ or ‘X’ are assigned in all the sub-factors for each design concern shown in Table 2 and the results are then summed to be the input for each specific design concern. Here, the value ‘O' indicates that the alternative (e.g., vertical mast) is associated with the specific sub-factor, and the value ‘X’ means the alternative is not associated with the sub-factor (Guo, S. & Tucker, R., 1996). For example, the exterior wall painting robot with a winch cable can acquire a stable working posture on vertical planes, thus the value ‘O’ is assigned in the cell (S2, A2). However, it is hard to expect that such a robot would stably and effectively paint under poor weather conditions like gusty wind compared to the types of the vertical mast or the high ladder truck. Thus, the value ‘X’ is assigned in the cell (S3, A2). Base on the API analysis result shown in Table 2, the high ladder truck model was selected as the best design alternative for the exterior wall painting robot.
Automation Preference Indices (API) for the Suggested Conceptual Ideas

S: Safety, P: Productivity, Q: Quality, A1: Vertical Mast, A2: Winch Cable, A3: High Ladder Truck
As other technical considerations, enabling technologies for recognizing any openings or obstacles and performing any graphic works on exterior walls are briefly discussed. First, machine vision, CAD-based object recognition, and laser sensing techniques were identified to be used as supporting tools for sensing any openings or obstacles on exterior walls. A machine vision algorithm using a pattern recognition technique can be used as an effective tool to identify certain patterns of walls such as openings or obstacles. However, it is anticipated that such a machine vision technique would not be practically feasible because of poor working environments and conditions of exterior wall painting job such as strong sunlight, glare, shadows, and dust of sprayed paint particles. Any openings or objects on exterior walls can be also identified by using the CAD-based object recognition technique. However, drawbacks also exist in this CAD-based object recognition approach especially when the CAD drawings do not represent the latest update of the building design (as-built design). Also, any calibration error between the CAD drawing and the actual building may result in unexpected outcomes. Thus, it was concluded that the laser sensing technique can be used as the most efficient tool for recognizing any openings and obstacles on exterior walls. To perform any graphic works on exterior walls in an automated way, a CAD-driven computer graphics technology can be used in a very efficient manner. In general, the graphic work is mainly performed on a flat side of walls. In such a flat side wall, the robot can easily perform any graphic work by specifically calibrating coordinates in the real world workspace and its three dimensional CAD drawing.
Based on the analysis results of general and technical considerations required for the development of Exterior Wall Painting robot (EWPro), a conceptual model of the EWPro (Fig. 7-(a)) is proposed in this study. As shown in Fig. 7, a conceptual model of the EWPro was designed using the concept of a high ladder truck which can flexibly move along the horizontal and the vertical directions on multi-sided exterior walls of an apartment building. Compared to the existing exterior wall painting robots with vertical mast or rail or winch cable, significant amount of time savings can be expected by using such a ladder truck type of exterior wall painting robot regardless of the complexities of roof structures or exterior wall shapes. The EWPro uses light weight of hoist rail and laser senor to keep a uniform distance between exterior wall surface and its end-effecter in an effort to improve painting quality by spraying a certain amount of paint on building exterior walls (Fig. 7-(a), (b)). To keep the uniform distance between exterior wall surface and its end-effecter (multi-nozzles in painting head), a telescoping function should be equipped with the arm of the EWPro (Fig. 7-(a)). Control mechanism of the EWPro for automation of exterior wall painting work is briefly illustrated in Fig. 7-(c).

Conceptual Design of the EWPro to be developed
As shown in Fig. 7-(c), the control mechanism of the EWPro was designed to enable the EWPro to move to the exact position to spray, and to automatically paint using the multi-nozzles regardless of the specific shapes (e.g., partly rugged surfaces) of apartment building exterior walls or floor plans. The painting head of the EWPro was thus designed to horizontally move on the light-weight hoist rail and rotate ±90° along two axises on its support plate as shown in Fig. 7-(c). For example, horizontal painting head can be used for automatically painting side walls or flat exterior walls of apartment buildings moving upward and downward as shown in Fig. 7-(c)-①. In this case, good productivity can be reached because the workspace of the EWPro can eventually cover more than the width of the end-effector by horizontally moving the painting head on the hoist rail. In the meanwhile, the EWPro can effectively paint any rugged surfaces or irregular shapes of exteriors walls by vertically (roll) and horizontally (yaw) rotating the end-effector of the painting head as shown in Fig. 7-(c)-②.
Once the EWPro with a high ladder truck type is set up on the ground (Fig. 8-①), the EWPro moves to the top floor of the apartment building by the boom. The EWPro located on the top floor then moves downward to perform painting from the top to the bottom of the building as shown in Fig. 8-②. At the same time, the end-effecter of the EWPro automatically paints the exterior wall using the telescoping function (Fig. 8-©) and laser sensing technology (Fig. 8-⑤). Once the painting head of the EWPro (Fig. 8-©) completes painting of the exterior wall from the top floor to the 1st floor, then the EWPro moves to the next work station. A barrel for paint feeding is equipped with the specially designed high ladder truck. This process is repeated until all exterior walls are painted.

Illustration of Automated Exterior Wall Painting Work Process by EWPro
At the planning and design phases of a construction robot, a decision on the development of the full-scaled physical robot is made based on the technical feasibility of the suggested conceptual robot design and its economic feasibility analysis result (Kangari R. & Halpin D., 1990, Zied K. et al., 2000). The economic feasibility analysis is performed through analyses and comparisons between the additional costs (e.g., initial investment, maintenance and operating costs) required for development and utilization of the robot and the associated benefits.
The Economic Feasibility Analyzer (EFA) software program developed in this study was used to automatically calculate the economic feasibility of the proposed conceptual model in an effort to quantitatively evaluate benefits acquired by developing and utilizing the EWPro compared to the conventional method. Essential information required for the economic feasibility analysis of the proposed EWPro was gathered to estimate costs and benefits. Rate of return, benefit-cost ratio, break-even point, and sensitivity analysis were used to verify the economic benefits of the automated method. Since variables and assumptions can vary from one contractor to another and from site to site, sensitivity analysis was performed in an effort to verify the economic value of the automated method under the various conditions. Finally, overall cost savings from the automated method were estimated by directly comparing the total construction costs required to complete the same amount of work in both the conventional method and the automated method.
Using the EFA, the economic feasibility of the EWPro was analyzed through the following five steps: 1) variables and assumptions for economic analysis, 2) labor cost analysis of the automated method and the conventional method, 3) equipment cost analysis of the automated method and the conventional method, 4) comparison and analysis of annual costs (Equivalent Uniform Annual Cost: EUAC) and benefits (Equivalent Uniform Annual Benefit: EUAB) in both the automated and conventional methods (Fig. 9).

Economic Feasibility Analysis Procedure of the EWPro
In this study, the variables and the assumptions (see Fig. 10) made for the economic feasibility analysis of the EWPro are as follows:

Variables and Assumptions Applied for Economic Feasibility Analysis
A contractor purchases and uses one EWPro for apartment building exterior wall painting work.
This is the economic analysis at the planning and design phases. The same daily production rate (1 apartment building per day) was applied to the automated method and the conventional method, although it is anticipated that the automated method would be more productive than the conventional method. Such a daily production rate, ‘1 building (22 story-building, 4 household units/floor, and 82.6m2/ household unit) per day,' was identified from the site survey.
Purchase cost of the EWPro (or initial investment): US$70,000
Expected service life of the EWPro: 10 years
Operating and maintenance costs of the EWPro: for year 1˜5, 5% of the purchase cost (US$3,500/year), for year 6˜10, 10% of the purchase cost (US$7,000/year)
The number of workable days per year: 100 days
Minimum Attractive Rate of Return (MARR): 10% (The MARR was surveyed from the 20 painting contractors which are specialized in apartment building exterior wall painting)
No salvage value after service life of the EWPro
The painting cost by the conventional method can vary in accordance with the numbers of stories and household units per floor, the complexity of the building shape, and the number of laborers. Thus, this study surveyed and analyzed the total cost required to paint four-sided exterior walls of one apartment building in a rectangular shape with the size of 22-story, 4 household units per floor, and 82.6m2 per household unit in one day (8 working hours per day), in an effort to compare the economic feasibility between the conventional and automated methods. The site survey result obtained from 20 painting contractors indicated that the conventional method generally requires 14 laborers (1 foreman, 8 painters, 4 helpers, and 1 graphics worker), 1 airless spraying equipment (a pump and a barrel), and 540 liters of paint to complete such a given job.
In contrast, the authors estimated that the automated method would require approximately maximum 7 laborers (1 operator, 1 foreman, 3 painters, and 2 helpers) to complete the same amount of work. While no graphics worker is required, however, the automated method needs 1 system operator to remotely control the EWPro. In the automated method, the airless spraying equipment is not required because it is equipped with the EWPro. The material cost (paint) is basically the same for both methods. It is also estimated that there would be a cost benefit in total labor cost due to the reduction in the number of laborers required in the automated method, while an initial investment cost for the EWPro purchase and the total operating and maintenance costs during its service life should be added as additional cost elements in the automated method (Fig. 11).

Cost Elements for Economic Feasibility Analysis in both the Conventional and Automated Methods
The cost elements of the apartment building exterior wall painting work also include several miscellaneous costs such as ropes and safety equipment. However, such cost elements were not considered in the economic feasibility analysis model shown in Fig. 11 because the miscellaneous cost take a very small portion of the total cost of the apartment building exterior wall painting work which is an ignorable amount. The benefits gained from safety and quality improvements in the automated method were not considered in the economic feasibility analysis model because they are hard to accurately quantify in economic terms. Therefore, the economic feasibility analysis model proposed in this study focuses on evaluating the direct cost savings. The analysis results of labor cost and equipment cost in the conventional method and the automated method using the EFA indicated that US$1,170/day (US$1,130/day in labor cost and US$40/day in equipment cost, respectively) can be saved by using the automated method (Fig. 12-(a), (b), and (c)). From given assumptions and annual work volume (100 days/year), a contractor can annually save US$117,000 as EUAB during the service life of the EWPro by using the automated method.

Analysis results of labor and equipment costs in the conventional method and the automated method
In this study, the B/C ratio of the automated method using the EWPro is calculated based on the cash flow diagram shown in Fig. 13-(a). As shown in Fig. 13-(a), the annual benefit (EUAB) of using the automated method is US$117,000 (Fig. 12-(c)) when the number of annual workable days per year is 100 days. In a given MARR (10%), the present worth of benefits in the automated method is US$718,914 [4] . The present worth of costs in the automated method can be estimated at US$99,744 considering US$70,000 for the EWPro purchase, US$3,500 for the operation and maintenance from year 1 to 5, and US$7,000 for the operation and maintenance from year 6 to 10 [5] . As a result, the B/C ratio, 7.21 can be obtained [6] . It is thus concluded that the automated method using the proposed EWPro is economically feasible (Fig. 13-(a)).

Economic Analysis Results Using B/C Ratio, ROR, Breakeven Point Methods
In this study, the expected construction cost saving rate (%) of the automated method was estimated by directly comparing the EUAC (US$214,000) of the conventional method and the EUAC (US$97,000) of the automated method (Fig. 13-(b)) for the labor and equipment costs. In case of the automated method, the EUAC for purchasing, operating, and maintaining the EWPro during its service life (10 years), US$16,233 should be added as an additional cost to the overall painting cost of the automated method [7] . The additional EUAC in the automated method, US$16,233 implies that US$16,233 is annually required during the service life of the EWPro, if the automated method is utilized for apartment exterior wall painting. Such an additional EUAC should be added as a part of the annual painting cost. Therefore, the estimated total annual painting cost of the automated method would be US$113,233 (US$97,000 + US$16,233). In a given assumptions and an annual workable volume, a contractor can save US$100,767 (US$214,000 – US$113,233) annually for 10 years which accounts for 47% of cost saving over the conventional method (US$100,767 ÷ US$214,000). Fig. 13-(b) shows a cash flow diagram for the comparison of total annual painting cost between the conventional and automated methods.
Rate of Return (ROR) Analysis
The ROR analysis method is mainly used for the purpose of showing the economic feasibility of an investment alternative as a means for internal decision making within an organization. The rate of return analysis method considers an alternative worth to invest, if the ROR of the alternative is higher than the MARR or the interest rate expected from the alternative. On the other hand, it is not desirable to adopt an investment plan as a good alternative, if the ROR is less than the MARR or the interest rate. In the automated method, the EFA estimated its ROR as 162.1% [8] which is highly over the 10% MARR (Fig. 13-(c)).
Break-even Point Analysis
The break-even point is defined as the point where income just covers the associated costs or the point where two alternatives are equivalent. The expected break-even point can vary by initial investment cost, cash flow, or a payback risk level. Therefore, there may be considerable uncertainties in the accuracy of the break-even analysis data. In this study, such variation was complemented by using a sensitivity analysis. Actual benefits by utilizing the EWPro can be gained after the break-even point where the expected present worth of benefits just covers the expected present worth of costs. In the automated method, the EFA estimated its breakeven point as about 0.93 year (11-month) [9] (Fig. 13-(d)). It indicates that the costs spent for purchasing, operating, and maintaining the EWPro would be returned in 11 months with a given annual work volume and assumptions, and the net profit can be gained after the break-even point (Fig. 13-(d)).
It is also concluded that the economic feasibility of the automated method will be greater when considering the potential economic benefits such as more number of workable days and higher contract volume per year, safety and quality improvement, and time savings.
Sensitivity Analysis
Since data gathered for the economic analysis of investment alternatives generally represents projections of the future, there may be considerable uncertainty regarding the accuracy of such data. If small variations in a particular variable estimation would change selection of the alternatives, such a variable is sensitive and an estimator should place greater emphasis on improving the accuracy of the value in the variable. Economic analysis results proposed in this study can change due to variances in specific variables or assumptions resulting from the work conditions and environment of different contractors or sites. Therefore, a sensitivity analysis needs to be performed to consider variation of economic feasibility analysis results due to changes in specific variables or assumptions taken in this study. In this study, the number of annual workable day, the expected purchase cost and service life of the EWPro, the annual maintenance cost, and MARR, and the number of labor reduction were selected as the variables to be examined for the sensitivity analysis since these variables would differ from one contractor to another. Fig. 14-(a), (b), (c), (d), and (e) shows the sensitivity analysis results estimated by the EFA. Table 3 also summarizes the changes in values of B/C ratio, ROR, and break-even point in accordance with the number of annual workable days (50˜200 days) and the number of laborer reduction (6˜8 persons) at 10% MARR. For example, when the number of workable days per year is 100 days and workers are reduced by 6 persons, B/C ratio of 6.10, ROR of 136%, and break-even point of 13 months could be reached, thus making the automated method more economically favorable.

Sensitivity Analysis Results by the EFA
Sensitivity Analysis Results in Accordance with the Differences in the Numbers of Labor Reduction and Annual Workable Days

Finally, it is concluded that the development of the EWPro proposed in this study is technically and economically feasible. Also, developers and contractors would be able to have a significant economic gain by automating the current exterior wall painting work process considering the large work volume and a high preference of apartment housings in South Korea.
In this study, a conceptual design of the EWPro and its economic feasibility analysis model were proposed in an effort to automate exterior wall painting for apartment buildings. This study also analyzed the conventional painting process for apartment building construction and maintenance and its arising problems. Based on the general and key technical considerations required for automation of exterior wall painting, the EWPro with a high ladder truck was selected as the best design alternative.
Variables and assumptions were then made to analyze the economic feasibility of the proposed EWPro. Under the variables and assumptions (e.g., 100 workable days per year, 10% MARR) taken in this study, the B/C ratio, ROR, and break-even point were 7.21, 162.1%, and 11 months respectively, thus developing the EWPro is highly favorable and economically feasible. The economic analysis results also showed that it could gain 47% of annual painting cost savings compared to the conventional method. It was also expected that the economic benefits of the automated method will be much greater when considering more realistic number of workable days and contract volume per year, large number of laborer reduction, and safety and quality improvement in the automated method. A sensitivity analysis was extensively conducted to verify the superiority of the automated method over the conventional method as well.
In this study, the economic feasibility of the automated method was evaluated based on the 100 workable days per year in one construction site. When considering the multiple construction sites of a painting contractor for the same work volume per year, the economic benefits gained in the real world using the proposed automated method would be much greater than the estimated results here.
Finally, it is anticipated that the conceptual design and the economic analysis model of the EWPro presented in this study would be effectively used as a good benchmark in designing and analyzing other automated construction machines.
Footnotes
[1]
API(Vertical Mast) = (0.12 × 3/3) + (0.61 × 1/5) + (0.27 × 1/3) = 0.33
[2]
API(Winch Cable) = (0.12 × 2/3) + (0.61 × 1/5) + (0.27 × 1/3) = 0.29
[3]
API(High Ladder Truck) = (0.12 × 3/3) + (0.61 × 5/5) + (0.27 × 3/3) = 1.00
[4]
PW of benefits = $117,000(P/A, 10%, 10) = $718,914
[5]
PW of costs = $70,000 + $3,500(P/A, 10%, 5) + {$7,000(P/A, 10%, 10) − $7,000(P/A, 10%, 5)} = $70,000 + $7,000(P/A, 10%, 10) − $3,500(P/A, 10%, 5) = $99,744
[6]
PW of benefits / PW of costs = 7.21
[7]
$99,744(A/P, 10%, 10) = $16,233
[8]
NPW = PW of benefits - PW of costs = $117,000(P/A, i, 10) – {$70,000 + $7,000(P/A, i, 10) − $3,500(P/A, i, 5)} = 0, X = 162.1% (ROR)> 10% (MARR)
[9]
PW of costs = PW of benefits, $99744 = $117,000 (P/A, 10%, n), (P/A, 10%, n) = $99,744 ÷ $117,000 = 0.852, n = 0.93 year = 11 months