In this work, we investigate the trajectory tracking and point stabilization problems of asymmetric underactuated surface ships with non-diagonal inertia and damping matrices. By combining the novel state and input transformations, the direct Lyapunov approach, and the nonlinear time-varying tools, the trajectory tracking controller is derived, guaranteeing global κ-exponential convergence of state trajectory to the reference one satisfying mild persistent exciting conditions. By properly designing the reference trajectory, the proposed tracking scheme is also generalized to achieve global uniform asymptotic point stabilization. Simulation examples are given to illustrate the effectiveness of the proposed control schemes.
Control of surface ships is an active topic of research that continues to receive a considerable interest in the field of nonlinear control systems [1–26]. Based on the simplified assumption of the symmetric ship model with diagonal inertia and damping matrices, various control schemes have been developed for point stabilization [2–8], trajectory tracking [8–13], both point stabilization and trajectory tracking [14–15], and path following [16–18]. Realizing that such a simplifying model is unrealistic, recent research has aimed to deal with an asymmetric ship model with non-diagonal inertia and damping matrices [19–26]. However, the presented results for such a realistic ship model are limited to path following [19, 20, 22, 25] and position control [23, 26]. For the full state trajectory tracking control of asymmetric ships, a controller is designed in [21] to force position and orientation to globally track their reference trajectories; however, the tracking errors are only guaranteed bounded, not convergent to zero, and the reference trajectory must satisfy some strict assumptions, excluding the reduced fixed-point trajectory and the one converging to a fixed-point. In [24], a unified control law is proposed to track an arbitrary position and orientation trajectory including a fixed point; however, the tracking errors are still ensured bounded, not convergent to zero. To the authors' knowledge, no control scheme exists that is able to achieve global asymptotic full state trajectory tracking and global asymptotic full state stabilization for the asymmetric ship model with non-diagonal inertia/damping matrices even in the absence of model uncertainties and external disturbances.
The purpose of this work is to solve the asymptotic trajectory tracking and asymptotic point stabilization problems of asymmetric surface ships having non-zero off-diagonal terms presented in their inertia and damping matrices. By introducing novel coordinate and input transformations, we obtain the tracking error model in a cascaded form allowing for deriving a tracking control law via mild persistent exciting (PE) conditions imposed on the reference trajectory. The PE conditions are simple to check and allow for global κ-exponential tracking of a large class of reference trajectories, including both the circular and the straight line ones. By properly setting the reference trajectory, the obtained tracking controller can also be used to achieve global uniform asymptotic point stabilization, and thus provides a unified frame to solve both the trajectory tracking and the point stabilization problems of the asymmetric ships with non-diagonal inertia/damping matrices.
The remainder of the work is organized as follows. After introducing the full state model of underactuated surface ships and several novel state and input transformations, the error model for trajectory tracking is formulated in Section 2. The tracking controller is presented in Section 3, and is generalized to solve the point stabilization problem in Section 4. Simulation examples are illustrated in Section 5. Section 6 concludes the work.
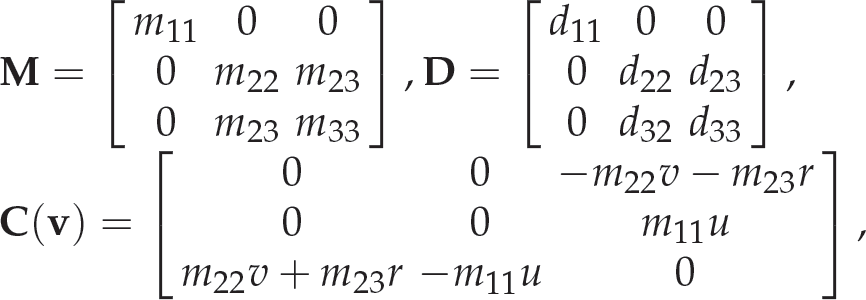
where v = [u, v, r]T denotes the velocities in surge, sway and yaw directions respectively, τ = [τu, 0, τr]T denotes the control input with (τu, τr) the control force and moment in surge and yaw directions respectively. The system matrices are given by
where M, C(v),D are the inertia, Coriolis/centripetal, and damping matrices respectively with mii > 0, dii > 0(i = 1, 2, 3).
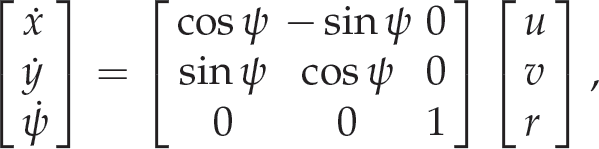
The kinematics of the ship is described by
where x, y and ψ represent the position and orientation of the ship in the Earth-fixed frame.
In modelling the ship's dynamics, it is assumed that:
A1) the high-order damping terms and the dynamics associated with the motions in heave, roll and pitch are all negligible;
A2) the inertia and damping matrices (M, D) are known exactly;
A3) the external disturbances are not included in the model.
The tracking and stabilization problems that arise by relaxing these assumptions will be investigated in future research.
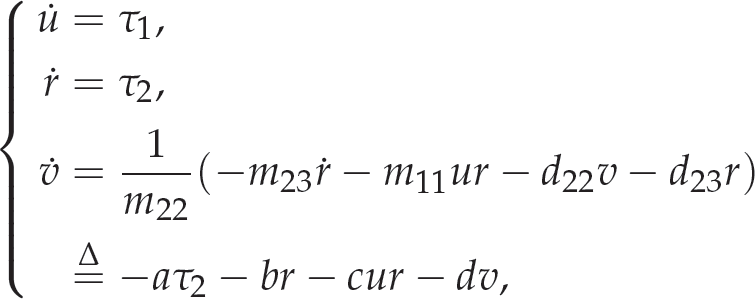
By taking as the new control inputs [21], the dynamic equation (1) is simplified to
where .
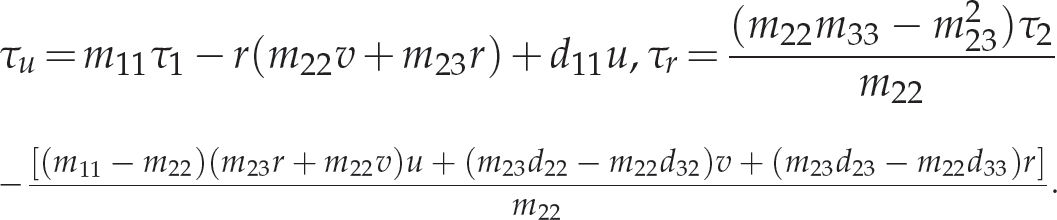
The new control inputs (τ1, τ2) and the true ones (τu, τr) are related by the following transformation
It is clear that the input transformation (5) is globally invertible provided the matrix diag is invertible, which always holds as the inertia matrix M defined in (2) is always positive definite, i.e., m11 > 0,m22 > 0, m22m33 – m223 > 0.
The inverse of the input transformation (5) can be derived as
By introducing the following coordinate transformation
the dynamics of the new coordinates can be obtained as
To remove the term aτ2 + br in the sway dynamics (the third equation of (4)) and the term v in the , we further introduce the following novel coordinate and input transformations
The dynamic equations of the new state variables are derived as
The new state equation (9) can be rewritten compactly as the following two subsystems
where
To formulate the trajectory tracking problem, the reference trajectory is assumed to be generated by the same model as that of the real one (3)–(4), that is,
By using the similar coordinate and input transformations
By defining as the tracking error, one obtains the error model dynamics as
where
Remark 1. Thanks to the novel state and input transformations (8) and (15), the error state dynamics has been converted to an advantageous form (19)–(20), which has a cascaded structure helpful for controller design in the next Section.□
To formulate the global & kappa-exponential trajectory tracking problem, we need the following definitions.
Definition 1 [27]. A continuous function γ: [0, ξ) → [0, ∞) is said to belong to class-κ if it is strictly increasing and γ(0) = 0, and belong to class-κ∞ if it belongs to class-κ with , .
Definition 2 [13]. The origin of a nonlinear system (with x ∊ Rn and f (t, x) piecewise continuous in t and locally Lipschitz in x) is called global κ-exponential stable (GKES) if a class-κ∞ function γ(·) and a positive constant λ exist such that the state trajectory starting from any initial state x(t0) ∊ Rn is globally κ-exponential convergent (GKEC), that is, .
The control object for trajectory tracking can now be stated as: find a feedback control law w1 (·), w2 (·) such that the origin of the closed-loop error model (19)–(20) is GKES.
Control development
Preliminaries
To facilitate the controller design, we first prove that the global κ-exponential stabilization problem of the whole system (19)–(20) can be reduced to the one of its subsystem (20).
Lemma 1. If , then any control law w1 (·), w2 (·) that makes the origin of subsystem (20) GKES also makes the origin of the whole system (19)–(20) GKES.
Proof. As , we conclude that are at most increasing with a rate of t, |zd| and |D1d|, |D2d| are at most increasing with a rate of t2 in view of (13)–(18).
Consider the non-negative function , its derivative is calculated as
where .
Let then
As |D1d|, |D2d| are at most increasing with a rate of t2, so are c2d(t) and by applying comparison principal [27], which in turn implies that is at most increasing at a rate of t2. As the origin of subsystem (20) is GKES, (e3, e4, e5, e6) are thus GKEC, and so are (E1, E2) from (21).
Since E1, E2 are GKEC, so is c2e(t), and hence is also GKEC by applying comparison principal [27], which in turn implies that (e1, e2) are GKEC. As ei(i = 1, 2, · · ·, 6) are all GKEC, the origin of system (19)–(20) is thus GKES.□
Based on Lemma 1, the global κ-exponential trajectory tracking problem of the ship has been reduced to the global κ-exponential stabilization problem of system (20). The remaining task is to: find a feedback control law w1 (·), w2 (·) such that the origin of the closed-loop system (20) is GKES under certain PE conditions imposed on the reference trajectory.
Controller design
To solve the global κ-exponential stabilization problem of the subsystem (20), the error dynamics (20) is further converted to a suitable form by a coordinate transformation such that the obtained tracking control law yields mild PE conditions satisfied by a large class of reference trajectories.
Proposition 1. The control law (26) guarantees that the origin of the whole system (19)–(20) is GKES, provided the reference trajectory satisfies the following PE conditions:
Proof. By , one gets (ē3, e4, e5, ē6) ∊ L∞ and V2 converges to a constant limit V2(∞) as t → ∞. From , one can verify that , , are all bounded, which in turn implies , we can hence conclude from Barbalat Lemma [27], so that ē3 converges to a constant limit ē3(∞).
As , , then .
By , one obtains .
Combining the facts of and , we conclude , , if , which contradicts to the PE condition , therefore, must be zero, that is, the origin of the closed-loop system (23)(26) is globally uniformly asymptotically stable.
The linearization of (23)(26) at the neighbourhood of origin can be obtained as
The derivative of V2 along (28) is . According to the same line for proving the global uniform asymptotic stability of the closed-loop system (23)(26), one can conclude that system (28) is also globally uniformly asymptotically stable.
Since the closed-loop system (23)(26) and its linearization (28) are both globally uniformly asymptotically stable, it is thus GKES [28].
As are GKEC and , thus is at most linearly increasing with time, and , are all GKEC, that is, the origin of the subsystem (20) is GKES, and so is the origin of the system (19)–(20) by Lemma 1.
Remark 2. The PE conditions (27) for global κ–exponential tracking are very simple for verification, and will be shown in the following discussions to be quite a mild requirement on reference trajectories.
Discussions on the PE conditions
In this subsection, the PE conditions (27) are carefully checked showing that they hold for a large class of reference trajectories including both the straight line and the circular-like ones.
By , one infers that from the dynamics of the reference trajectory (13)(14)(29). Therefore, the PE conditions (27) hold, so that the proposed control law can achieve global κ -exponential tracking of circular-like bounded trajectories. □
Case 2. .
In view of , (29) is reduced to . By , we deduce . From , one concludes (otherwise, , that is, the PE conditions (27) are satisfied in this case, so that the proposed control law can achieve global κ -exponential tracking of a straight line unbounded trajectory. □
Case 3. .
By , one infers that and are at most linearly increasing with time, implying , . By , one induces from . The PE conditions (27) are thus satisfied. □
Remark 3. The above analysis shows that the PE conditions (27) hold for a large class of reference trajectories including straight line, circular-like ones and many others.
Generalization to point stabilization
Thanks to the mild PE conditions (27), the proposed tracking scheme can be extended to achieve point stabilization by properly designing the reference trajectory.
The results for point stabilization are summarized as the following proposition.
Proposition 2. Suppose that the reference trajectory is set to
then the control law (26) guarantees that the states are globally uniformly asymptotically convergent to zero, where are all positive constants, and a smooth function of ξ satisfying .
Proof. By applying (30) to the dynamics (13)–(14), we have
From , one gets and converges to a constant limit as . By , one deduces from (31), thus , . From , we can verify , hence , that is, , so that converges to a constant limit .
As , , then .
If , then . Else if , then from . By verifying , we deduce . Combining the facts of , , , , we conclude . It is therefore that must be zero, so that referring to (31). From , , , one concludes .
Since , one gets from (21). Referring to , , one deduces . We finally conclude from and . □
Remark 4. The basic idea of the proposed stabilization scheme can be explained as follows: the real ship is steered to track the reference trajectory which is designed oscillating around the origin along the straight line yd = 0 until the real one converges to the neighborhood of the reference one, and then they both converge to the origin. □
Remark 5. The point stabilization control law (26)(30) for system (3)–(4) is dynamic smooth time-varying, and thus not contradicting the well-known Brockett's necessary condition for non-holonomic systems [29]. □
Simulations
In this section, the effectiveness of the proposed control laws is illustrated via simulation examples. Consider an underactuated surface vessel with model parameters as [20]
The maximum magnitudes of the actuated forces and moments are 2N in surge and 1.5Nm in yaw, i.e., |τu| ≥ 2N, |τr| ≥ 1.5Nm. Generally speaking, if a control law makes the origin of a system globally uniformly asymptotically stable, then the same control law with magnitude saturation makes the origin of the same system locally uniformly asymptotically stable due to the fact that there always exists a neighbourhood of origin such that the control law is not saturated. Therefore, we can conclude that the proposed control law (26) with a saturation constraint|τu| ≥ 2N, |τr| ≥ 1.5Nm still makes the origin of the closed-loop tracking error system locally uniformly asymptotically stable in the sense that the tracking errors uniformly asymptotically tend to zero for small initial tracking errors and small reference signals (ud, vd, rd, τ1d, τ2d). To enlarge the attractive basin of the closed-loop tracking error system, the control parameters should be selected such that the linearization system (28) has a slow transient response.
The proposed control laws are verified by three simulation examples: straight-line trajectory tracking, circular trajectory tracking and fix-point stabilization.
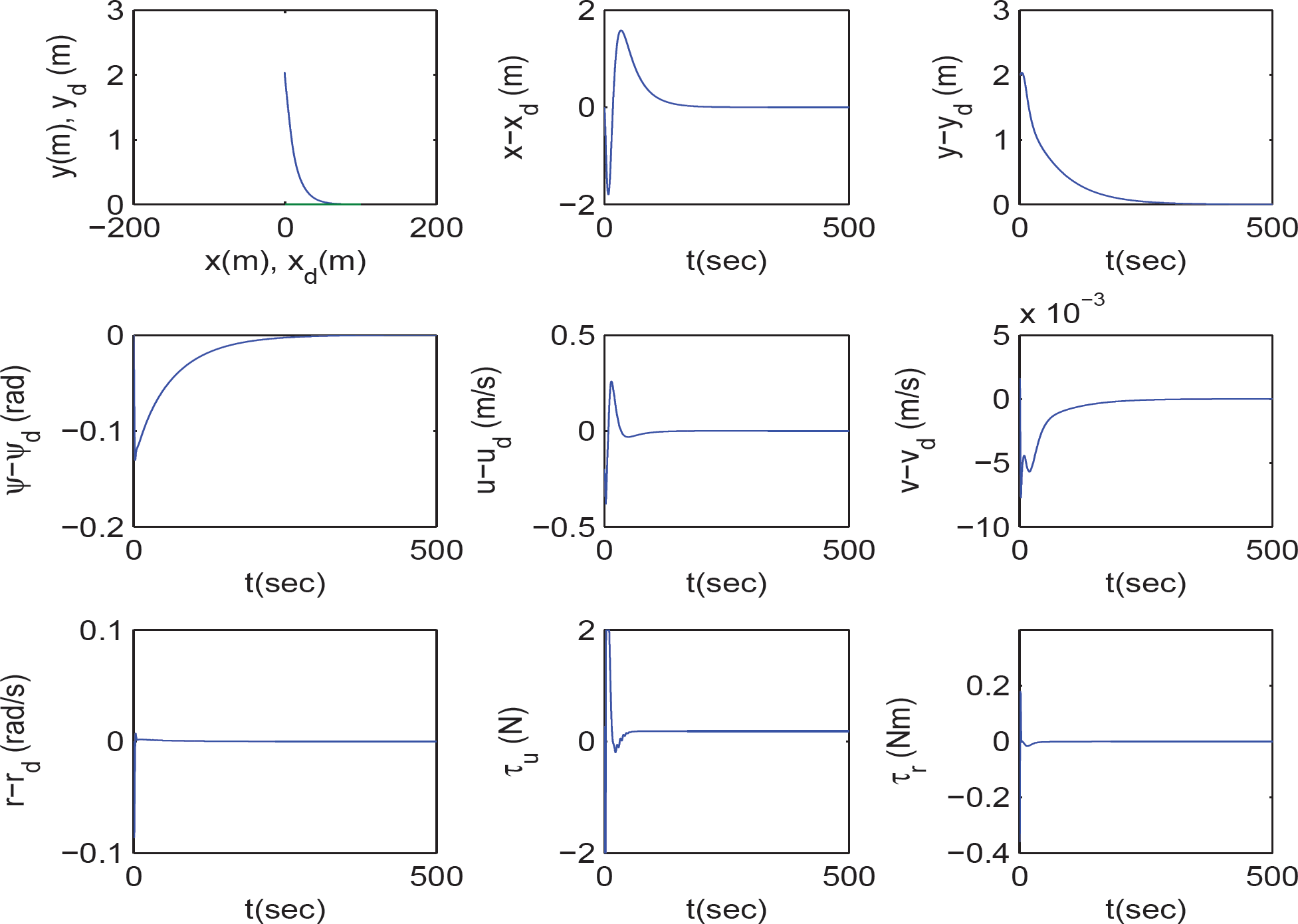
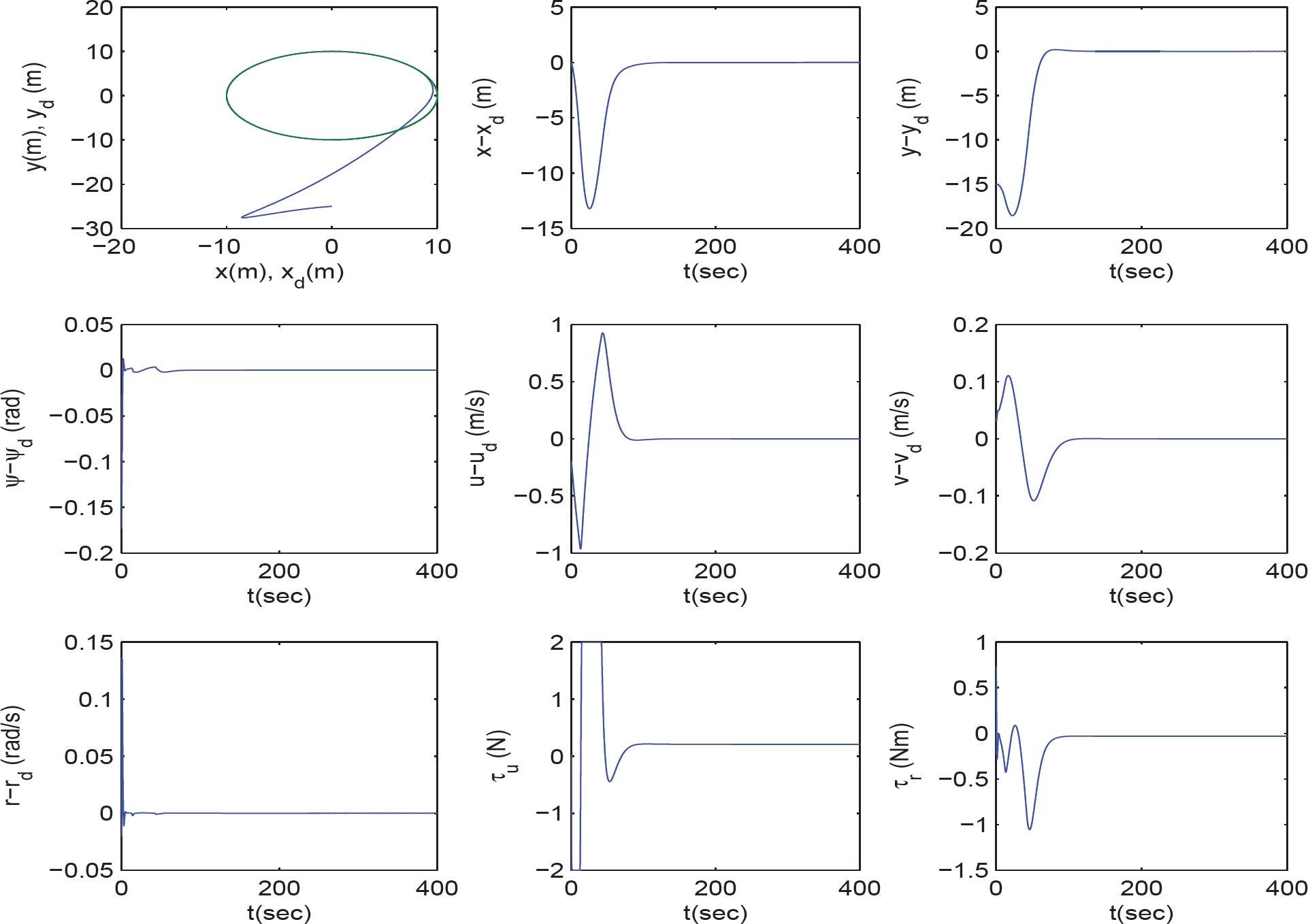
The straight-line reference trajectory is generated via the reference model (13)–(14) by setting τ1d = τ2d = 0, (xd, yd, ψd, ud, vd, rd)0 = (0, 0, 0, 0.2, 0, 0). The controller parameters are selected as k1 = 205.2, k2 = 0.5, k3 = 0.2, k4 = 0.3, which assign poles of the linearization system (28) to (−0.015, −0.3925 + 1.0218j, −0.3925 − 1.0218j, −0.2). Simulation results for an initial state (x, y, ψ, u, v, r)0 = (0, 2, 0, 0, 0, 0) are shown in Fig.1. The circular reference trajectory is generated via the reference model (13)–(14) by setting τ1d = τ2d = 0, (xd, yd, τd, ud, vd, rd)0 = (0, −10, 0.1703, 0.2, −0.0344, 0.0203). The controller parameters are selected as k1 = 26.71, k2 = 1, k3 = 0.21, k4 = 1, which assign poles of the linearization system (28) to (−0.1, −0.11, − 1 + j, −1 – j). Simulation results for an initial state (x, y, ψ, u, v, r)0 = (0, −25, 0, 0, 0, 0) are shown in Fig.2.
Plots of geometric paths of actual/reference ships, time history of state tracking errors and control inputs for straight-line trajectory tracking with an initial state (x, y, ε, u, v, r)0 = (0, 2, 0, 0, 0, 0).
Plots of geometric paths of actual/reference ships, time history of state tracking errors and control inputs for circular trajectory tracking with an initial state (x, y, ψ, u, v, r)0 = (0, −25, 0, 0, 0, 0).
For point stabilization, we chose control parameters and control function as , , where the control parameters () assign the poles of the last three equations of (28) (ignoring the terms and ) to , and the control parameters are selected by several trials to obtain a better performance and a large attractive basin. Simulation results for an initial state are shown in Fig.3.
Plots of geometric path, time trajectories of states and control inputs for point stabilization with an initial state (x, y, ψ, u, v, r)0 = (0, 2, 0, 0, 0, 0).
It is observed from Fig.1-Fig.3 that, considering the limited magnitudes of control inputs, the proposed control laws are saturated during an initial short time period of transient response, but at last still successfully steer the states to the desired reference trajectories and the desired set point respectively for quite large initial tracking errors. It is also worth mentioning that the produced trajectories (Fig.3) for fixed-point stabilization is quite significantly oscillating and slowly convergent to the desired state due to the sinusoid time function introduced in the designed desired trajectory (30) and the constraint imposed on the magnitude of surge force and yaw torque.
Conclusion
In this work, we have developed a trajectory tracking controller for asymmetric underactuated surface ships with non-diagonal inertia and damping matrices. The proposed control scheme is the first one able to achieve global κ–exponential convergence of state to the desired reference trajectory with simple and mild PE conditions suitable for a large class of reference trajectories. By properly assigning the reference trajectory, the obtained tracking control law is also generalized to achieve global uniform asymptotic point stabilization, and thus providing a unified framework for solving both the trajectory tracking and the point stabilization problems of surface ships with non-diagonal system matrices.
It is worth mentioning that the construction of control laws relies on an exact ship model with no parameter uncertainties and no external disturbances. Our future research topics will focus on designing robust tracking and stabilizing controllers for underactuated ships with unknown non-diagonal inertia/damping matrices and unknown external disturbances.
Footnotes
7. Acknowledgements
This work was supported by the National Science and Technology Major Project (no. 2012CB821202), the Beijing Natural Science Foundation (no. 4122043), and the National Nature Science Foundation (no. 60874012, no. 61174057).
References
1.
FossenT.I., Marine Control Systems, Trondheim Norway: Marine Cybernetics, 2002.
2.
PettersenK.Y.EgelandO., Exponential stabilization of an underactuated surface vessels, Proc. 35th IEEE Conference on Decision and Control, Kobe, Japan, December 1996, pp. 967–972.
3.
ReyhanogluM., Exponential stabilization of an underactuated autonomous surface vessel, Automatica, 1997, 33(12): 2249–2254.
4.
MazencF.PettersenK.Y.NijmeijerH., Global uniform asymptotic stabilization of an underactuated surface vessel, IEEE Transactions on Automatic Control2002, 47(10):1759–1762.
5.
DongW.GuoY., Global time-varying stabilization of underactuated surface vessel, IEEE Transactions on Automatic Control, 2005, 50(6):859–864.
6.
MaB.L.Global κ-exponential asymptotic stabilization of underactuated surface vessels, Systems and Control Letters, 2009, 58(3): 194–201.
7.
MaB.L.HuoW., Smooth time-varying uniform asymptotic stabilization of underactuated surface vessels, Joint 48th IEEE Conference on Decision and Control, Shanghai, P.R. China, Dec.16–18, 2009, pp.3137–3141.
8.
GhommamJ.MnifF.DerbelN., Global stabilization and tracking control of underactuated surface vessels, IET Control Theory and Applications, 2010, 4(1): 71–78.
9.
JiangZ.P., Global tracking control of underactuated ships by Lyapunov's direct methods, Automatica, 38(2): 301–309, 2002.
10.
PettersenK.Y.NijmeijerH., Underactuated ship tracking control: theory and experiments, International Journal of Control, 2001, 74(14): 1435–1446.
11.
DoK.D.JiangZ.P.PanJ., Underactuated ship global tracking under relaxed conditions, IEEE Transactions on Automatic Control, 2002, 47(9): 1529–1536.
12.
LefeberE.K.Y.PettersenNijmeijer H., Tracking control of an underactuated ship, IEEE Transactions on Control Systems Technology, 2003, 11(1): 52–61.
13.
LeeT.C.JiangZ.P., New cascade approach for global k-exponential tracking of underactuated ships, IEEE Transactions on Automatic Control, 2004, 49(12): 2297–2203.
14.
DoK.D.JiangZ.P.PanJ., Universal controllers for stabilization and tracking of underactuated ships, Systems and Control Letters, 2002, 47(4): 299–317.
15.
BehalA.DawsonD.M.DixonW.E.FangY., Tracking and regulation control of an underactuated surface vessel with nonintegrable dynamics, IEEE Transactions on Automatic Control, 2002, 47(3): 495–500.
16.
AguiarA.P.PascoalA.M., Dynamic positioning and way-point tracking of underactuated AUVs in the presence of ocean currents, International Journal of Control, 2007, 80(7): 1092–1108.
17.
DoK.D.JiangZ.P.PanJ., Robust global stabilization of underactuated ships on a linear course: state and output feedback, International Journal of Control, 2003, 76(1):1–17.
18.
DoK.D.PanJ., State- and output-feedback robust path-following controllers for underactuated ships using Serret-Frenet frame, Ocean Engineering, 2004, 31(16): 1967–1997.
19.
DoK.D.PanJ., Global robust adaptive path following of underactuated ships, Automatica, 2006, 42(10): 1713–1722.
20.
FredriksenE.PettersenK.Y., Global κ—exponential way-point maneuvering of ships: Theory and Experiments, Automatica, 2006, 42(4):677–687.
21.
DoK.D.PanJ., Global tracking control of underactuated ships with nonzero off-diagonal terms in their system matrices, Automatica, 2005, 41(1): 87–95.
22.
DoK.D.PanJ., Underactuated ships follow smooth paths with integral actions and without velocity measurements for feedback: theory and experiments. IEEE Transactions on Control Systems technology, 2006, 14(2): 308–322.
23.
LiJ.H.LeeP.M.JunBong-HuanLimYong-Kon, Point-to-point navigation of underactuated ships, Automatica, 2008, 44(12): 3201–3205.
24.
DoK.D., Practical control of underactuated ships, Ocean Engineering, 2010, 37(13): 1111–1119.
25.
BrhaugE.PavlovA.PanteleyE.PettersenK.Y., Straight line path following for formations of underactuated marine surface vessels, IEEE Transactions on Control Systems Technology, 2011, 19(3): 493–506.
26.
ConsoliniL.TosquesM., A minimum phase output in the exact tracking problem for the nonminimum phase underactuated surface ship. IEEE Transactions on Automatic Control, 2012, 57(12): 3174–3180.
27.
KhalilH.K., Nonlinear Systems (Second-Edition), Prentice-Hall, Upper Saddle River, New Jersey, USA, 1996.
28.
LefeberA.A.J., Tracking control of nonlinear mechanical systems, Ph.D. Dissertation, Dept. Mech. Eng., University of Twente, Twente, The Netherlands, 2000.
29.
BrockettR.W., Asymptotic stability and feedback stabilization, in: BrockettR.W.MillmanR.S.SussmannS.J. (Eds.) Differential Geometric Control Theory, Birkhauser, Boston, MA, 1983, pp.181–191.