
Abstract
The formation task achieved by multiple robots is a tough issue in practice, because of the limitations of the sensing abilities and communicating functions among them. This paper investigates the decentralized formation control in case of parameter uncertainties, bounded disturbances, and variant interactions among robots. To design decentralized controller, a formation description is firstly proposed, which consists of two aspects in terms of formation pattern and interaction topology. Then the formation control using adaptive neural network (ANN) is proposed based on the relative error derived from formation description. From the analysis on stability of the formation control under invariant/variant formation pattern and interaction topology, it is concluded that if formation pattern is of class Ck, k ≥1, and interaction graph is connected and changed with finite times, the convergence of the formation control is guaranteed, so that robots must form the formation described by the formation pattern.
Keywords
1. Introduction
Multiple robots coordination to form a kind of pattern is an interesting phenomenon, which also has wide applications in highway transportation, army inspection, and external stars exploration. If a predetermined formation pattern is given, a group of robots forming formation will be investigated in this paper.
Formation is viewed as a kind of information consensus in which robots or agents interact with each other using various sensors and communication techniques. For example, a simple discrete-time Vicsek model is built up, which commands a group of robots to move on the plane with the same heading (Vicsek, T., Czirok, A., Jacob, E. B. & Schochet, O., 1995). Using graph theory, the theoretical explanation about Vicsek model and its extended version are provided in (Jababaie, A., Lin, J. & Morse, A. S., 2003) and (Ren, W. & Beard, R. W., 2005).
In robotic applications, there are several approaches to multiagent coordination referred in the literature, namely leader-following, behavioral, potential fields, virtual structures, and generalized coordinates.
In leader-following, one of the agents is designated as the leader, which tracks predefined reference trajectories, with the rest of the members designated as followers which follow the leader or their neighbors (Wang, P. K. C., 1991, Sugar, T. & Kumar, V., 1998, Desai, J. P., Ostrowski, J. & Kumar, V., 1998). Leader-following paradigm is easy to understand and implement. In addition, the formation can still be maintained even if the leader is perturbed by some disturbances. However there is no explicit feedback to the formation.
The virtual structure approach is another technique widely used in formation control, where the entire formation is treated as a single structure (Lewis, M. A. & Tan, K.H., 1997, Moscovitz, Y. & DeClaris, N., 1998, Tan, K.H. & Lewis, M.A., 1996). Using virtual structure approach, it is easy to prescribe a coordinated behavior for the group. And feedback to the virtual structure is naturally defined. Hence even if some agents are failed, the formation is still maintained. However this approach is not proper when formation is time-varying or needs to be frequently reconfigured.
A general approach is developed to model and control of formations in terms of generalized coordinates (Spry, S. C., 2002, Spry, S. & Hedrick, J. K., 2004). It produces asymptotic tracking of trajectories, including those with time-varying rotations and shape, and allows the controller to be formulated in terms of quantities which are closely related to the performance objectives of tracking a group trajectory while maintaining a desired formation shape.
All three techniques mentioned above require that the full state of the leader or virtual structure be communicated to each member of the formation. In contrast, behavior-based approach is decentralized and may be implemented with less communication. The basic idea of the behavioral approach is to prescribe several desired behaviors for each agent, such as target seeking, collision/obstacle avoidance, and interaction with neighbors, so that desirable group behavior emerges finally (Jonathan, R. T., Beard, R. W. & Young, B. J., 2003, Balch, T. & Arkin, R. C., 1998, Chen, Q. & Luh, J. Y. S., 1994). As a decentralized implementation, behavioral approach enables agents derive controls for multiple competing objectives simultaneously. In addition, there is explicit feedback to the formation. The primary shortage is that group behavior cannot be explicitly defined. Hence it is difficult to analyze group behavior mathematically.
Another decentralized approach of formation control is potential fields approach (Schneider, F. E. & Wildermuth, D., 2003). In this method, different virtual forces belonging to robots, obstacles and the desired shape of formation are combined and used to move each robot to its desired position inside the formation. Similar to behavioral approach, the control derived based on several forces enables agents form a formation, while avoiding collision with obstacles or others. But the formation pattern (shape) needs to be broadcasted to all members. Hence comparing with behavioral method, it needs more communication cost. Moreover, for mobile robots with nonholonomic constraints, it is difficult to provide a mechanism to solve special movements induced by nonholonomic constraints.
Just as mentioned, leader-follower approach is easily implemented in practice. Comparing with virtual structure approach, leader-follower paradigm can realize time-varying formation pattern. Even under complex conditions, such as uncertain parameters and unknown disturbances, individual control in leader-following paradigm can guarantee formation stability. Hence it is easily realized in practical applications than generalized coordinates. Comparing with behavioral approaches, the feasibility of leader-following paradigm can be guaranteed mathematically. Therefore in this paper, we adopt leader-follower to realize formation in which information exchange is directed, and robots are required to form formation according to certain formation patterns. The major problem is to develop a decentralized control strategy to guarantee formation's stability.
To describe formation behavior in the continuous-time case, a technique of leader-to-formation stability (LFS) is proposed in which formation stability is analyzed by input-to-state stability method (Tanner, H. G., Pappas, G. J. & Kumar, V., 2004). Another important technique broadly used for formation control stability is Lyapunov theory (Liu, Y., Passino, K. M. & Polycarpou, M., 2001, Ogren, P., Egerstedt, M. & Hu, X., 2002, Kowalczky, W. & Kozlowski, K., 2004, Bicho, E. & Monteiro, S., 2003, Balch, T. & Hybinette, M., 2000).
Since in practical situations, most platforms of formation are constructed using multiple nonholonomic mobile robots which are always modeled with some uncertain parameters, and because of limitations on sensors and communication ability, relationship among robots described by formation patterns and interaction topology is always variant, the linear feedback-control law proposed in (Tanner, H. G., Pappas, G. J. & Kumar, V., 2004) can not be employed for the formation. Hence we extend the ANN control designed for smooth continuous system (Fierro, R. & Lewis, F. L., 1998, Lewis, F. L., Yegildirek, A. & Liu, K., 1996) to the case of nonsmooth, even noncontinuous systems, so that the control strategy is able to make robots keep in regular formation in practical environment.
The rest of this paper is organized as follows. In Section 2, we introduce the description about formation structure using graph theory. Based on the description, Section 3 presents the sufficient condition of formation control in terms of a Lemma. Section 4 introduces the decentralized control strategy using adaptive neural network. Three theorems are presented in Section 5 to investigate the feasibility of this formation control under different conditions, including variant or invariant formation pattern and interaction topology. The feasibility is validated by a simulation, and some discussions about practical applications are provided. Finally conclusions are drawn in Section 6.
2. Description of Formation's Internal Information
In this paper, a group of robots are labeled by R i (i = 1, …, N), where R l represents the leader of the formation. Let P d = [p1 d p2 d … p N d ] T denote the desired positions of all robots relative to robot l. Obviously, p l d = 0. Let P = [p1 p2 − p N ] T denote the coordinates of robots in universal frame. The internal information of a formation consists of two aspects.
(1) Formation pattern (denoted by D d (t)
Formation pattern describes the desired formation shape by a matrix, D d = {D ij d }NxN, whose elements present all desired relative distances between the robots, i.e., D ij d = p i d − p j d . Obviously D ii d = 0. Moreover we denote D d (t) as the time-varying formation pattern. We also let D = {D ij }NxN denote real relative distances between robots, where D ij = p i − p j . Fig. 1 shows an example of relative matrix D d . In the example, R1 is assigned to play the role of the formation leader.

A formation pattern including six robots. Only the x-axis coordinate of D d is displayed below the figure
(2) Interaction topology (denoted by G)
To detect the relative positions within a formation, robots need to make contacts with each other. Hence it needs to describe interactions among robots. No matter what technique is applied to realize interaction, we use graph theory to present interactions among robots.
A directed graph G is exploited to describe the interaction topology of formation, which consists of a set of vertices (robots) Ξ and a set of arcs Ω, where α = (v, w) ∈ Ω and v, w ∈ Ξ. Arc α(v, w) represents that R
v
takes R
w
as a reference object to compute its desired reference position. Since a robot may interact with several robots simultaneously, its reference position may be determined by several robots. Let G = {g
ij
}NxN denote adjacency matrix associated with graph G, where g
ij
represents a kind of weight denoting the degree of R
j
affecting the reference position of R
i
. G has a property,

And we define H = {h
ij
}N×N as H = I − G. Due to the property of G, it holds that
An example of interaction topology and adjacency matrix is illustrated in Fig. 2. Since R1 plays the role of the leader, it holds that g11 = 1, while other diagonal entries are zero g ii = 0, (i = 2, …, N)).

An example of interaction topology among six robots, where L max represents the maximal range of interaction, so that a robot can make contact with other robots within this range
Obviously combining these two aspects, the internal information of a formation can be described by G o D d , where the operator o means Hadamard product (to simplify denotation, we let D d denote both time-fixed and time-varying formation patterns).
3. Motivation of Formation Control
Based on the description of formation, let E = {e
j
}N×1 = (G o D − G o D
d
)1N×1 be a relative error vector, so that it follows that

Since R l plays the role of the formation leader, it holds g ll = 1, while g lj = 0, j = 1, …, N, and j ≠ l. Therefore the l th element of the relative error, e l , equals zero. It's reasonable because the adjacency graph is built relative to the leader, the relative error of R l should be zero.
The following lemma is introduced.
Proof: See Appendix A.1.
Lemma 1 suggests a way to realize formation control. Since GP + G o D d 1N×1 in (2) can be measured on real time, if G and D d are known for all members of the formation, every robot can control itself to follow a reference point determined by GP + G o D d 1N×1 in order to form formation.
4. Individual Control Strategy
4.1. Dynamic Description of Individual Robot
A kind of two-wheel car-like mobile robot shown in Fig. 3 is employed to realize formation. The dynamics of robot is expressed as
A two-wheel-driven mobile robot.

where q = [p
x
p
y
θ]
T
represents general coordinate, τ
d
represents bounded disturbance and unmodeled dynamics. We take the center of mass as the robot's position. Matrices referred in the equation are given by

Normally the nonholonomic constraints can be expressed as
It is easy to find a full rank matrix A(q) which is formed by the vectors spanning the null space of constraint matrix J(q) such that A
T
(q)J
T
(q) = 0, where

where

4.2. Neural Network Controller
Following (2), we take GP + G o D
d
1N×1 as local desired position for individual control design. If we decompose GP + G o D
d
1Nx1 for individual robots, the desired reference point for R
i
is of the form

A filtered error is defined as z
i
= ė
i
+ Λe
i
. If define a temporal variable, ṗ
i
r
= ṗ
i
d
− Λe
i
, then z
i
= ṗ
i
− ṗ
i
r
. Substitute it into (6), and let z˜
i
= T
i
z
i
, thus

Because there may exist parameter uncertainties, we use a neural network to model
A nonlinear function A two-layer feedforward neural network

where V ∈ RN
I
×N
H
represent the input-to-hidden-layer interconnection weights, W ∈ RN
H
×N
O
represent the hidden-layer-to-outputs interconnection weights, where N
H
, N
I
and N
O
are the numbers of neurons in the hidden layer, the input layer, and the output layer respectively, the activation function σ(·) is in the form of
Let Y M denote the bound of ideal weights, such that ‖W‖ F + ‖V‖ F ≤ Y M .
Firstly, there is a property about the bounding fact.
Property 1: X is bounded by

where c1 to c3 are positive scalars,

Proof: See Appendix A2.
The purpose of NN learning is to construct a NN function f̂(X) to estimate f(X) on-line, which can be written as

where Ŵ and V̂ are estimates of NN weights.
The estimated errors are defined as f˜ = f − f̂, W˜ = W − Ŵ, and V˜ = V − V̂. And the hidden-layer output error is defined as
Applying Taylor series expansion, we can obtain

where

where
Property 2:

where c4, c8, and c9 are positive scalars.
Proof: See Appendix A.3.
Substituting f(X) into (8), we have

Now we design the input-output feedback linearization controller in terms of (17) and the adaptive backpropagation learning algorithm in terms of (18) respectively. Consequently the architecture of formation control is shown in Fig. 5.
The architecture of formation control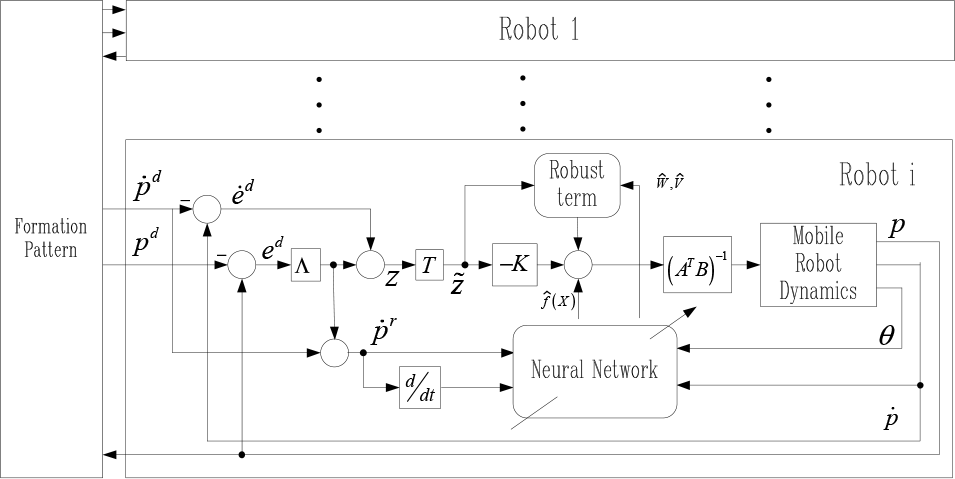


where K = diag{k1, k2} in which k1 and k2 are positive scalars, γ is a robust control term to suppress the disturbance of unmodeled structure of dynamics τ d and functional approximation error of NN ε, F and U are positive definite design parameter matrices governing the speed of learning.
Substitute the control law into (16), and let σ and

Adding and subtracting

where s(t) is a disturbance term,

5. Stability on Formation Control
In Section 2, it is mentioned that there are two aspects, the formation pattern D d and interaction matrix G, describing the information within a formation. In practice, due to the different requirements about formation tasks, formation pattern and interaction topology may be invariant or variant respectively. In this section, the stability of the formation control under three different situations covering all possible kinds of formation pattern and interaction topology will be analyzed.
5.1. Stability under Invariant Formation Pattern and Invariant Interaction Topology
The words “invariant formation pattern” in the title means that during the process, the formation pattern D d is constant, or the desired formation shape is static. The following theorem describes the convergence of formation control with fixed formation pattern.
Proof: See Appendix A.4.
The simulation of a formation with fixed formation pattern is proposed, where six robots are required to form a hexagon formation. The size of robot is 0.14 × 0.08m, while its weight is 1kg. The NN used in individual control includes a hidden layer with 40 nodes. All weights of NN are initialized as random values within [0,1]. R1 plays the role of formation leader, which is required to follow a trajectory expressed as p y d = 0.3sin(p x d π). The simulation results are shown in Fig. 6. From Fig. 6 (a), we observe that six robots scattering randomly at the beginning can form a formation. The invariant interaction topology is denoted by arrows shown in the figure (a). And Fig. 6 (b) shows the relative errors of robots, where e x and e y mean the relative errors in X-axis and Y-axis directions respectively. Obviously all errors converge to zero in the end. So the individual control strategy works very well.

Simulation results of fixed formation pattern and interaction topology
5.2. Stability under Variant Formation Patterns and Invariant Interaction Topology
The variant formation pattern means that the formation pattern is changed over time. Just as mentioned in Section 2, the time-varying formation pattern is denoted by D d (t).
5.2.1. The Problem Induced by Variant Formation Pattern
In practice, due to moving obstacles, perceiving limits, and even direct control commands, formation pattern should be changed on real time. For example, when a formation is passing through an obstacle field, if the formation perceives an obstacle which is on the way of its members, it has to generate another formation pattern so that its members can avoid the obstacle according to the new formation pattern. A simple illustration about the change of formation pattern is shown in Fig. 7 where there are two robots forming a leader-follower formation. When it is perceived that the obstacle is on the way of R2, R2 has to change its relative position from parallel to R1 to behind R1. Hence a transition process, which is between the dashed verticals in Fig. 7, is necessary to make formation pattern change continuously. It is obvious that since the formation pattern is changed on real time, D d (t) over the whole process must be not of class C∞, i.e., D d (t) doesn't have continuous derivatives of any order, so that we can not guarantee the convergence of formation control using Theorem 1. To ensure convergence of the formation control, we have to figure out the conditions under which the adaptive NN control can be applied. Theorem 2 presents the conditions which ensure stability of formation control.
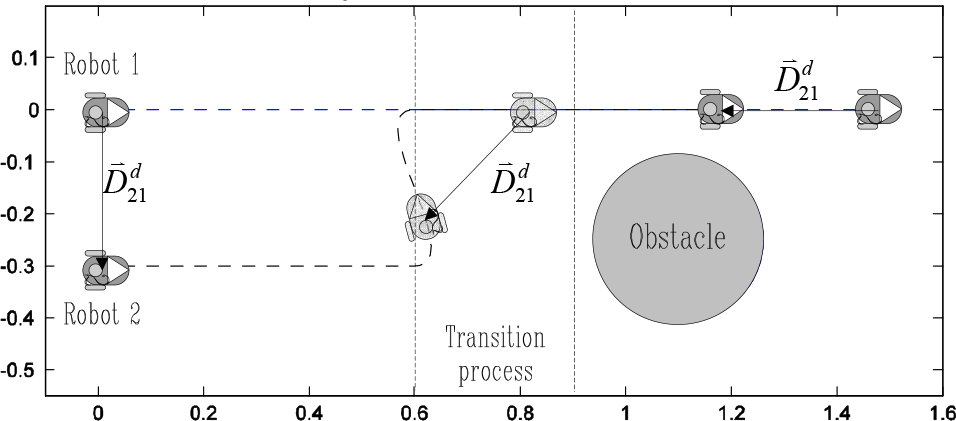
An example of variant formation pattern
5.2.2. Convergence of Formation Control with Variant Formation Pattern
Proof: See Appendix A.5.
From Theorem 2, it is concluded that the sufficient condition of convergence of the formation with invariant interaction topology is that the formation pattern is at least of class C1 continuous.
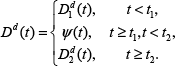
Assume that within the duration of [t1, t2], formation pattern is required to change from D1
d
(t) to D2
d
(t), which is of class C∞ respectively. The transition process is defined as

where t ∈ [t1, t2], η(t) is a function which satisfies the following boundary conditions.

Applying the transition process ψ(t), it is easy to prove that the formation pattern D
d
(t) described in (24) is of class C1.
Hence such a general transition process ensures that the pattern satisfies the conditions in Theorem 2, so that the formation must be constructed. The simulation proposed in the next subsection includes an example of such transition process.
5.3. Stability under Variant Interaction Topology
5.3.1. Noncontinuous System Resulting from Variant Interaction Topology
Since interaction is affected by the robot's ability such as perceiving range and communication bandwidth, one robot is able to make contact with other robots within its perceiving range. If the distance between robots become too far to set up interactions, or their interactions are blocked by obstacles, robots have to seek other partners to set up new interactions. Therefore the interaction topology and the graph associated with it may change from time to time. That means the adjacency matrix is variant.
Based on the analysis of the previous subsection, it is known that the system errors, z˜, W˜, and V˜ should be smooth continuous, in order that the NN control strategy be applied. Assume that the adjacency matrix is changed from G1 to G2. It is easily proved that even if the formation pattern and positions of robots are fixed, the relative errors E associated with the two adjacency matrices are different. That means when G is changed, there is a sudden change of z˜, so that z˜ is not continuous any more, and the control strategy can not be expressed in the Filippov sense. In fact we can not guarantee the convergence of formation control with variant interaction topology only using Theorems 1 and 2. Hence in this subsection, we analyze performance of formation control using theory of switched systems, in order to figure out the additional conditions for formation control.
5.3.2. The Extended Theorem about Convergence of Switched System
Owing to change of interaction topology, the formation system can be viewed as a switched system. Theorem 2.3 in (Branicky, M. S., 1998) asserts that in a switched system, if dynamics of all subsystems are Lipschitz continuous and there is a Lyapunov-like function for the system, the system must be stable. But due to robust term γ, if the subsystems are chosen according to (Branicky, M. S., 1998) implied, the dynamics of subsystems in formation control are not Lipschitz continuous. Hence we need to propose an extended theorem based on Theorem 2.3 in (Branicky, M. S., 1998) to analyze stability of formation control with variant interaction topology.
Similar to (Branicky, M. S., 1998), for a switched system ẋ(t) = f
j
(x(t), t), j ∈ Q, where Q represents a set including all systems to which we can switch, we define the infinite switching sequence that indexed by an initial state, x0:

where (k
s
, t
s
) means that the system evolves according to ẋ(t) = f
k
s
(x(t), t) for t
s
≤ t ≤ ts+1. We also define the sequence of indexes

and the sequence of switching times

The interval completion I(T) of a nondecreasing sequence of times T = t
0
, t1, … is the set
L j (0) = 0, L̇ j (x (t)) ≤ 0 for all t ∈ I(S|j);
L j is almost nonincreasing on ε(S | j) except finite times in finite duration.
Then the system is stable in the sense of Lyapunov.
Proof: See Appendix A.6.
It is obvious that if there is a Lyapunov-like function satisfying the properties mentioned in Theorem 3, the stability of the formation control must be guaranteed. In the following subsection, we will analyze the properties of our formation system to verify their stability in practical conditions.
5.3.3. Stability of Formation Control with Variant Interaction Topology
We denote set
Since the definition of Ē does not include H, Ē must be continuous, even if G is changed over time. Based on it, another filter error is defined as
If define

where j ∈ Q. The elements included in Q will be explained later.
Before determining Lyapunov-like function, we firstly propose all situations which result in switch, in order that f1j, f2j, and f3j, where j ∈ Q, are globally Lipschitz continuous.
Due to effect of the robust term γ, when z˜ passes through zero, (20) is not Lipschitz continuous. So we prescribe that there is a switch at this instant. According to the definition of the robust term, the forms of f1j, f2j, and f3j before and after this switch are the same and Lipschitz continuous respectively. That means such switch does not change system index j.
When the transition strategy shown in Section 5.2 is applied to make D d ∈ C1, from the discussions in the previous subsection, we know that the learning algorithm (18) is not Lipschitz continuous. We also prescribe at this instant that a switch is triggered. And similar to the previous situation, this switch does not change system index j.
When interaction topology is changed, due to noncontinuity of relative errors, the system index j is switched to another one. Since the size of
From these situations, we know that only the third situation induces change of system index, so the size of Q is the same as the size of
Consider one system included in Q. To simplify denotation, the index j is omitted. Since R
l
is the leader of the formation, it holds that z̄
l
(t) = 0 for all t. To design a positive definite function (p.d.f.) in Theorem 3, we delete all entries which relate to robot l from Z̄,

where T̂ = diag{T i }, M̂ = diag{M ci }, F̂ = diag{F i }, Ĝ = diag{G i }, i = 1, …, N, i ≠ l, Ĥ denotes the matrix resulting from taking off the both l th row and column of H. Undoubtedly it holds that L(0) = 0.
From (1), it holds that
Therefore the following equality holds.

where H̄ denotes the submatrix of H which results from taking off the l th row of H. Substitute it into (29).

Obviously (30) is the combination of the Lyapunov functions in the form of (A.4.1) for all robots except robot l. Therefore after some computations similar to the derivation of (A.4.12) which represents the derivative of individual Lyapunov function, for each j ∈ Q, we have

where K̄
min
= diag{K
i
min
} and
Now let's check whether L
j
satisfies the second property of p.d.f. or not. Suppose in a duration [t
start
, t
end
) there is no switch induced by change of interaction topology. Since the first two situations inducing switches do not change system index j, the switch sequence in the duration can be denoted by
According to the analysis in Sections 5.1 and 5.2, in [t start , t end ), the formation system is a nonsmooth continuous system, and L j is monotonically nonincreasing on S d . That means the situation 1) and 2) can not make L j be increasing on ε(S|j) in the interval [t start , t end ). So the only chance that L j is increasing on ε(S | j) is induced by the situation 3), the change of interaction topology, while not every time of change of interaction topology induces an increase of L j on ε(S | j).
Therefore to guarantee the second property of p.d.f. in Theorem 3, it is required that there are finite changes about interaction topology, in order that the system is stable in the sense of Lyapunov. Moreover after the last time of the change of interaction topology, the system becomes the nonsmooth continuous system analyzed in the previous subsections, so that Z must converge to zero, and robots will form a formation.
In one word, if interaction topology is changed finite times, the formation system must satisfy the conditions mentioned in Theorem 3, so that according to Theorem 3, it is guaranteed that the group of robots must form a formation described by the pattern D d (t).
5.4. Simulation about Formation Control with Variant Formation Pattern and Interaction Topology
We propose a simulation to illustrate the performance of the formation when formation pattern and interaction topology are variant. In the simulation, a formation navigation based on particle swarm optimization (PSO) is utilized to generate proper paths for the leader of the formation in order that other members can follow the leader to pass through an obstacle field without collision with obstacles. Roughly speaking, in the simulation there are two formation patterns applied: a triangle one and a linear one. If no obstacles perceived by the leader, the group tries to keep a triangle formation. Once the leader senses obstacles, it generates a proper path to avoid obstacles. At the same time, it changes the formation pattern to a linear one, so that other robots will follow the “footprints” of the leader to avoid obstacles.
Since the simulation is mainly to verify the feasibility of control strategy, the details of the process of path planning using PSO is ignored, which can be found in (Li, Y. & Chen, X., 2005). In the simulation, R1 plays the leader of the formation. There are some assumptions about the simulation.
The maximum of sensor range for obstacles is 0.7m;
The maximum of interaction range between robots is 0.6m;
Four obstacles are located at (2.5, 0.25), (3.5, 0.5), (4.5, −0.3), and (5.5, 0.1).
The parameters about robots are the same as the simulation presented in Section 5.1. The transition function η(t) used in the simulation is of the form

where t D is the duration of the transition process; t0 is the beginning of the transition process.
The results of simulation are illustrated in Fig.8 and Fig.9. The whole path generated for the leader includes four segments, two beelines and two curves. According to these segments, the whole formation process is also divided into four segments which are denoted by 1 to 4 in Fig. 8 (a). The segments of path designed for R1 in segments 2 and 3 are expressed as following.

Simulation results of the formation

Simulation results about adaptive NN convergence


Obviously the whole path generated for R1 is smooth continuous. If it is assumed there is a virtual point moving along the path, the leader uses the adaptive NN to follow this virtual point to reach the destination.
Fig. 8 (b) displays the change of formation pattern and interaction topology. The arrows shown in (b) indicate the interaction topologies among robots. Due to the interaction limits 0.6m, at the beginning an interaction topology is set up as (i). And such topology is held until the formation enters segment 2. When the formation becomes a linear one, because R3 is beyond the interaction limit of R4, R4 has to change its reference objects. The similar situation happens to R5. Hence the interaction topology is changed to the form shown in (iii), which is held as far as the end of the simulation.
Fig. 8 (c) shows the relative errors of robots, all of them converge to zero. When the formation passes from segment 1 into segment 2 and from segment 3 into segment 4, two transition processes of formation pattern are employed to change D d smoothly, which can be observed near 7.5 seconds and 35 seconds respectively. At these two instants, relative errors of R2 to R6 increase.
That looks against the convergence of the system. We think this phenomenon is induced by the relative fast convergence of the estimate of weights. This quick change about estimate of weights can be observed in the right figure of Fig. 9 (b), in which at times near 7.5s and 35s, the trace of the estimate of NN weights of R3 decreases more quickly than other time.
Just as mentioned, when the formation changes from triangle one to linear one or vice versa, the relative errors become noncontinuous. That induces a sudden change of relative error, which is called a leap of error. Fig.8 (d) illustrates the leaps of error of R4 and R5, when R4 and R5 have to change their reference objects. Obviously if formation is formed, such leaps of errors are so trivial relative to the size of robots, that the effect of noncontinuity induced by time-varying G can be ignored in practice.
Since the optimal values of weights can not be obtained, we only display the comparison of the output of f̂(X) with the actual result of
Finally Fig. 9 (b) displays the temporal dynamics of trace(Ŵ T Ŵ) + trace(V̂ T V̂).
6. Conclusions
As a kind of information consensus among mobile robots, formation control plays a very important role in formation navigation. This paper describes the relationship within formation in two aspects: formation pattern denoted by D d and interaction topology graph described by the adjacency matrix G. Therefore G o D d includes all relative information within a formation.
The relative position error is induced from the formation description. Suppose that there are unmodeled structures and bounded disturbance, a neural network control strategy with robust term is proposed in the paper for formation control. To apply the NN control strategy under all possible circumstances, such as variant or invariant formation pattern and interaction topology, the paper discusses the principles which should be satisfied in any design of formation navigation. In one word, if a formation pattern is of class C k (k ≥ 1) and the interaction graph is connected and changed finite times, the formation control ensures that robots must form the formation with predetermined shape.