
Abstract
This paper proposes an observer-based adaptive neural network backstepping sliding mode controller to ensure the stability of switched fractional order strict-feedback nonlinear systems in the presence of arbitrary switchings and unmeasured states. To avoid “explosion of complexity” and obtain fractional derivatives for virtual control functions continuously, the fractional order dynamic surface control (DSC) technology is introduced into the controller. An observer is used for states estimation of the fractional order systems. The sliding mode control technology is introduced to enhance robustness. The unknown nonlinear functions and uncertain disturbances are approximated by the radial basis function neural networks (RBFNNs). The stability of system is ensured by the constructed Lyapunov functions. The fractional adaptive laws are proposed to update uncertain parameters. The proposed controller can ensure convergence of the tracking error and all the states remain bounded in the closed-loop systems. Lastly, the feasibility of the proposed control method is proved by giving two examples.
Keywords
Introduction
Fractional calculus has unique memory properties and the ability to accurately model the system, so it can be easily applied to many industries and research fields, such as research electrical circuits, signal processing, chemical processes and biological engineering.1–4 Fractional order dynamic system can reflect the system’s own conditions more truly, so as to develop new control strategies to enhance the characteristics of control loops. 5 In recent years, many important results had been achieved in the stability analysis and control research of fractional order nonlinear systems. For example, Wang 6 extended backstepping control scheme to fractional order system and studied problem of Mittage-Leffler stabilization of fractional order nonlinear system. Ding et al. 7 proposed a fractional order backstepping controller for a class of fractional order nonlinear strict-feedback system with both unknown disturbance. Li et al. 8 designed an adaptive sliding mode controller to compensate the input uncertainties for a class of fractional order nonlinear systems with unknown external disturbances and input uncertainties. Jain et al. 9 proposed a fractional order internal model control method for non-ideal dc–dc buck and boost converter.
Adaptive backstepping control (ABC) method has been widely used to stabilize nonlinear systems in practical applications due to the excellent performance of compensating saturation. 10 For example, Zhou et al. 10 studied the stabilization problem for uncertain nonlinear systems and proposed an ABC algorithm. Sun et al. 11 proposed an ABC method to handle the position tracking problem of the permanent magnet synchronous motor system. Cai et al. 12 proposed a new ABC scheme to overcome the uncertainties for a class of second-order nonlinear systems with non-triangular uncertainties. At present, some control methods are combined with adaptive backstepping control methods to study classical nonlinear systems in the field of integer-order control method, such as adaptive backstepping sliding mode control (SMC), 13 adaptive neural network, or fuzzy backstepping,14,15 adaptive dynamic surface backstepping control, 16 and so on.
Traditional backstepping control requires accurate modelling information of the controlled object and cannot overcome the disturbance. To deal with the uncertain of nonlinear systems, the universal approximation theories of neural networks (NNs) and fuzzy logic systems (FLSs) can be employed to approach the unknown nonlinear functions. 17 For example, the authors proposed a fuzzy double hidden layer recurrent neural network approximation technology in Refs.,18–20 which can be regarded as a combination of a fuzzy NN and a RBFNN to improve the accuracy of a nonlinear approximation, so it has the advantages of these two NNs. Aiming at the field of fractional order systems control, Liu et al. 21 designed adaptive fuzzy backstepping control method is proposed for uncertain fractional order chaotic systems including unknown external disturbance and input saturation. Wang and Liang 22 combined backstepping and adaptive technology, using RBFNN to approximate the system unknown nonlinear uncertainty and proposed an ABC method for a class of uncertain fractional nonlinear systems with external disturbance and input saturation. Ma and Ma 23 proposed to introduce an auxiliary function to compensate the unknown external interference and the approximation error produced by the FLS approximation of the unknown function. Zhang and Li 13 proposed an adaptive backstepping sliding mode controller based on NN technology for the wheel slip tracking control system. For fractional multi-agent systems with unknown uncertainty, Shahvali et al. 24 designed a distributed controller based on NN control method, the NN is used to approximate the system unknown uncertainty. Based on RBFNN, an adaptive backstepping control method was proposed by Shahvali et al. 25 for the consensus problem of fractional order nonlinear multi-agent systems. For fractional order input saturated permanent magnet synchronous motor (PMSM), Lu and Wang 26 proposed a NN method combined with command filtering technique. Sui et al. 27 used NN to model uncertain fractional order systems and presented an adaptive switching dynamic surface control method for fractional order non-strict feedback nonlinear system.
In most practical applications, the system states cannot be fully accessed, and the designer cannot know the output and input of the plant. In this case, observer-based control is usually required. There have been many studies in the field of integer-order control combining observers with adaptive inversion techniques. For example, Lu and Wang 28 designed a state observer to obtain the unmeasured state for a fractional chaotic PMSM with the immeasurable state and the parameter uncertainties. Tong et al. 29 proposed a fuzzy state observer to estimate the unmeasurable states and designed an adaptive fuzzy output-feedback backstepping controller for uncertain strict-feedback nonlinear systems. For fractional order systems with system uncertainties and external disturbances, observers and NN approximations are rarely considered together. This is of great significance for further research on new control technologies based on neural networks and observers.
It should be recognized that the abovementioned fractional order nonlinear systems are a class of non-switched systems. It is worth pointing out that the switched system is another more complicated system. It is formed by switching signals between subsystems. Practical applications, such as hybrid vehicles and circuit systems, are all switching systems. Applying the common Lyapunov function method, Tong et al. 30 solved the control problem of arbitrary switching systems. Sui et al., 27 Long and Zhao 31 and Li and Tong 32 studied the switching control approaches of strict feedback switched nonlinear systems through the average dwell time method.
Based on the previous discussion, this paper proposes an adaptive neural network backstepping sliding mode controller based on DSC technology for a class of the switched fractional order strict-feedback nonlinear systems with unmeasured state. It should be pointed out that the theoretical results obtained in this paper is not a simple extension from integer-order systems to fractional systems. We use some properties of the Caputo fractional derivative and the integral inequality to overcome the adverse effects from the incorporation of weakly singular kernels in fractional derivative. Compared with the current researches, the contributions of this work are list as follows:
In comparison with Refs.,21,22,28 this paper proposes an observer-based adaptive neural network backstepping sliding mode controller for a class of the switched fractional order strict-feedback nonlinear systems with unmeasured states. Compared with the previous works in Sui et al., 27 the state observer is introduced into the proposed method to estimate the system state.
Compared with the previous works in Ma and Ma, 23 the sliding mode control term is introduced to enhance robustness and the fractional order DSC technology is used to avoid “explosion of complexity” and obtain fractional derivatives for virtual control continuously. Compared with the previous works in Ding et al., 7 the uncertain disturbances are approximated by RBFNN. The stability of the closed-loop system is ensured by the constructed Lyapunov functions. And in our design, the proposed fractional update laws estimate the unknown parameters and the upper limit of the approximation errors.
Under the framework of adaptive backstepping control technique, the desired tracking performance for the switched fractional order strict-feedback nonlinear systems is obtained by using the designed controller which integrates observer, RBFNN, fractional order adaptive laws, sliding mode control method, DSC technique.
The rest of the paper is organized as follows. Section 2 introduces basic theory about fractional calculus and proposes the controlled switched fractional order nonlinear system. In Section 3, we construct an observer to estimate the system states firstly, and then a controller is proposed based on the adaptive backstepping sliding mode control method. In Section 4, the effectiveness of the proposed control method is proved by giving two examples. In Section 5, we summarize the paper and give some conclusions.
Preliminaries
Fractional calculus
The Riemann-Liouville (R-L) fractional derivative definition and Caputo fractional derivative definition are commonly used in the study of fractional differential. Because Caputo fractional derivative definition is easier to give the initial value conditions of the fractional derivative equation, it is widely used in engineering applications. This paper mainly adopts the Caputo definition. The R-L fractional integral 5 is defined as

The R-L fractional derivative is defined as

where
The Caputo fractional derivative 5 is defined as


where


For all integer

when

where


where

we can obtain

where
System description
Many fractional order nonlinear systems can be written as a lower triangular form, and it is referred as the lower triangular system. For example, the fractional order Chua-Hartley’s system Wang et al., 38 the fractional order Arneodo system 39 and the fractional order Duffing-Holmes chaotic system. 40 The fractional order Arneodo system:

the fractional order Chua-Hartley’s system:

the fractional order Duffing-Holmes system:

In the paper, we consider the switched fractional order strict-feedback nonlinear system with uncertain disturbances.
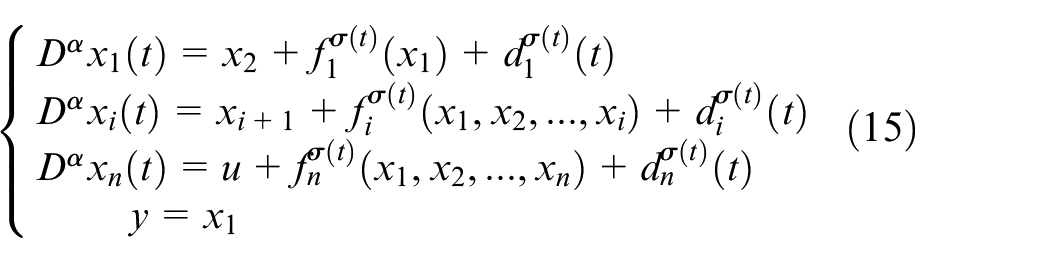
where
Rewriting system (15):
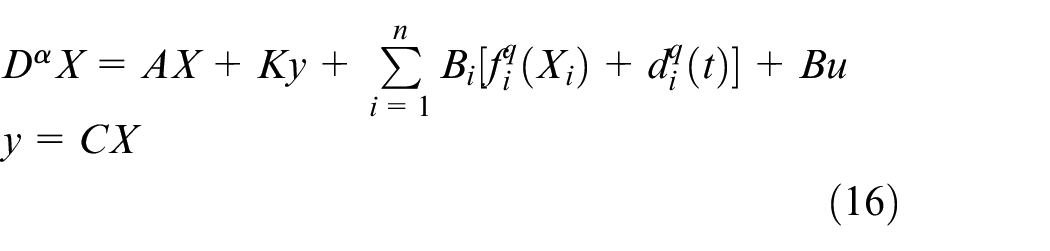
Where

Control objectives: Let
Main results
Observer design

where

where
Let
where
By Assumption 1, we can obtain

Define the vectors of optimal parameters as

where
Define errors of the optimal approximation and parameters estimation as


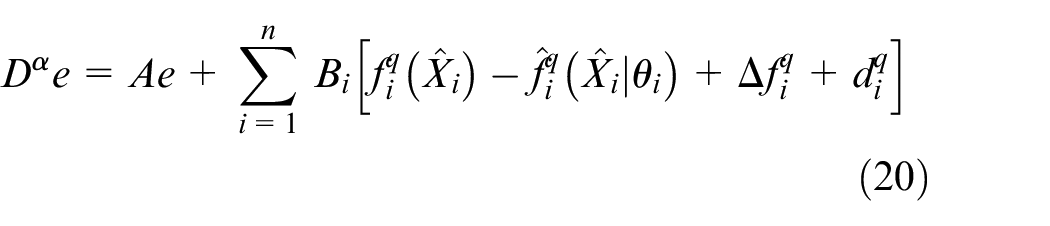
By equations (20) and (23), we have
where

According to Lemma 3 and (17), we can obtain
By Lemma 4 and Assumption 3, we can obtain
and
where
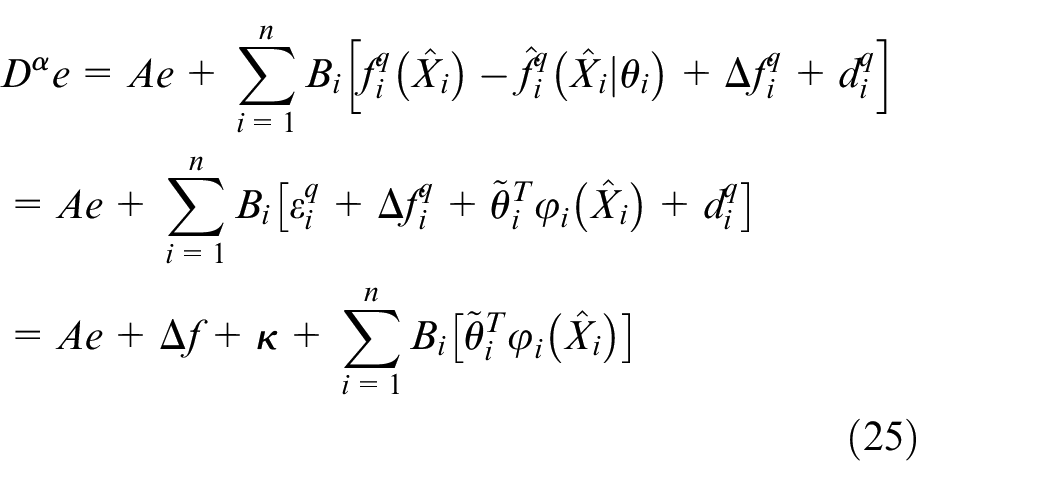
By equations (27)–(29), we obtain

where
Controller design
the error surfaces

the intermediate control functions
the parameters update laws

the control input

where
Proof.

According to
Define the second error surface

Then we obtain

Construct the second Lyapunov function:

From (30) and (38), we have
Design the first intermediate control function



According to Lemma 4, we have


Substituting(41), (42) and (43) into (40), we obtain
note that
According to (44) and (45), we have
where
By using DSC technique, we can obtain the state variable

according to (49), we have

where

Further, we can obtain
Construct the third Lyapunov function:

we have
where
From (49) we can obtain
where
Choose the first intermediate control function



Substituting equations (56)–(58) into (55), we obtain
By employing Young’s inequality, we have

The intermediate control function



Employing DSC technique,

by (65), we have

where
Consider Lyapunov function:

From (54) and (57), we obtain


The Lyapunov function is chosen as

According to (68), we obtain
Design control law



From (71)–(74), we obtain
where
By using DSC technique, we can obtain

and
where
According to
According to Lemma 4, we have
Substituting (79) into (78), we obtain
Denote
Then (80) becomes

According to (83), we can obtain

where
According to Lemma 5, wo can obtain

Then, we have

Since

This means that if the parameters are suitable,
Simulations
In this section, we use the following two examples to verify the validity of the proposed method. Figure 1 shows the block diagram of the designed control system.
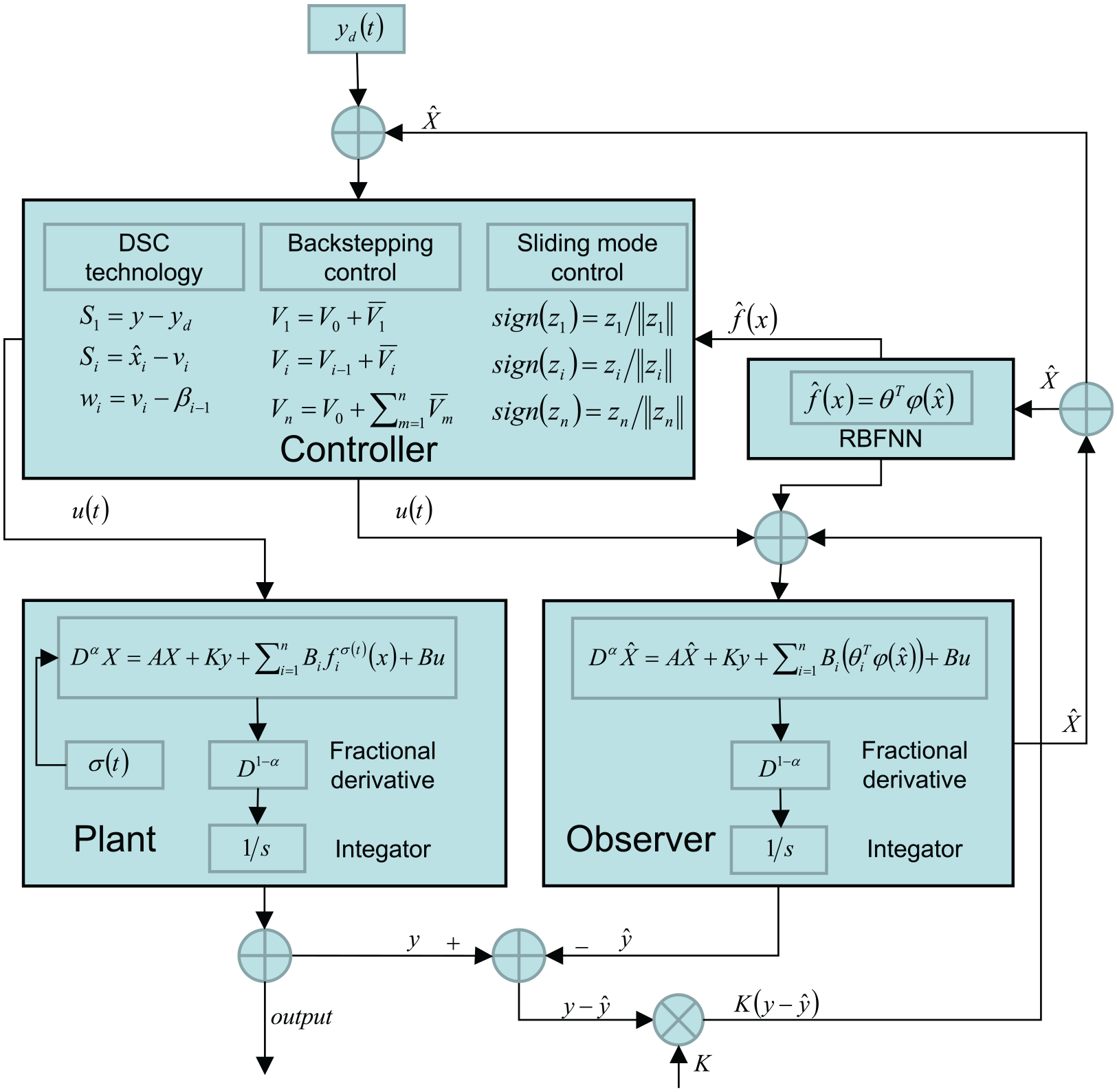
The block diagram of the designed control system.
Example 1
Consider a fractional order nonlinear system: 40

where
Figures 2 to 7 show the simulation results of Example 1. Figure 2 displays the trajectories of the fractional order Duffing-Holmes system (88) with
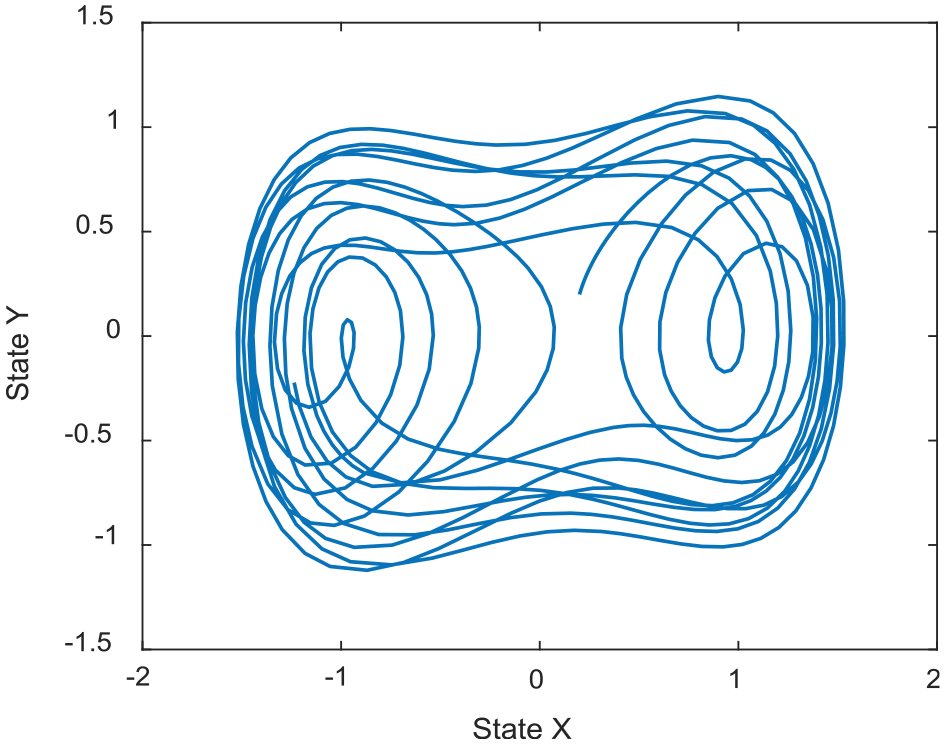
The trajectory of the fractional order Duffing-Holmes system.
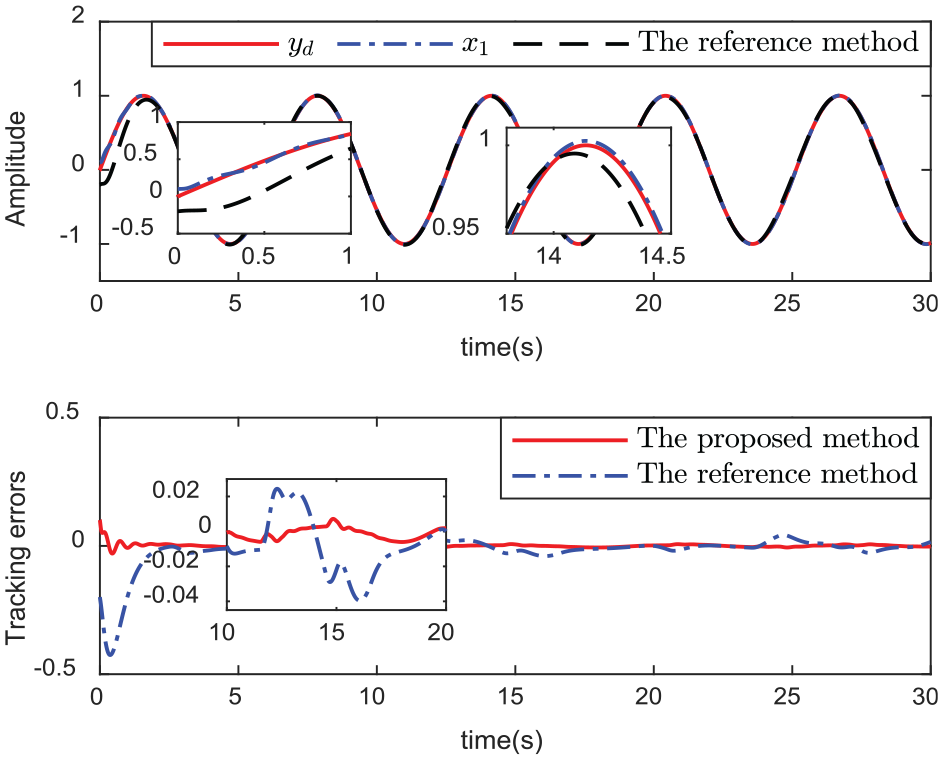
Signal tracking of
The trajectories of
The trajectories of signal tracking of
The control input in example 1.
The trajectories of
Example 2
Consider the fractional order strict-feedback nonlinear system: 39
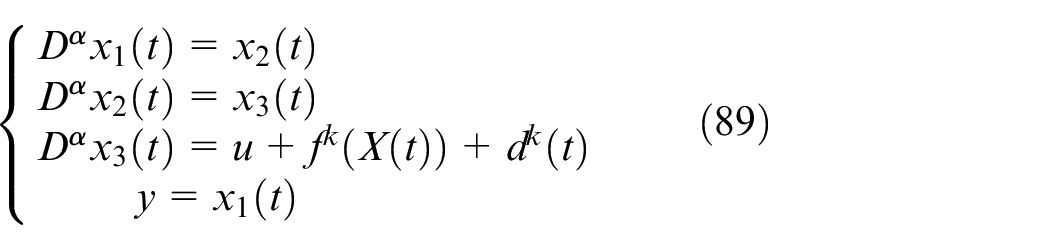
where the system order is
Choose the initial conditions of the system as
Figures 8 to 14 show the simulation results of Example 2. Figure 8 displays the trajectory of the fractional order Arneodo system (89) with
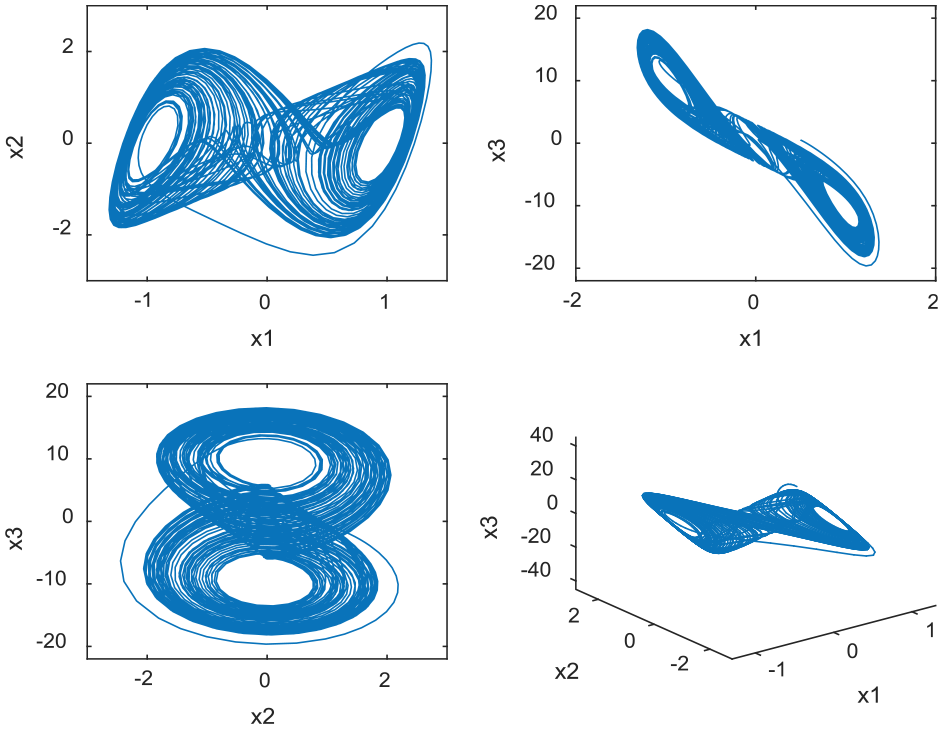
The trajectory of the fractional-order Arneodo system (89).
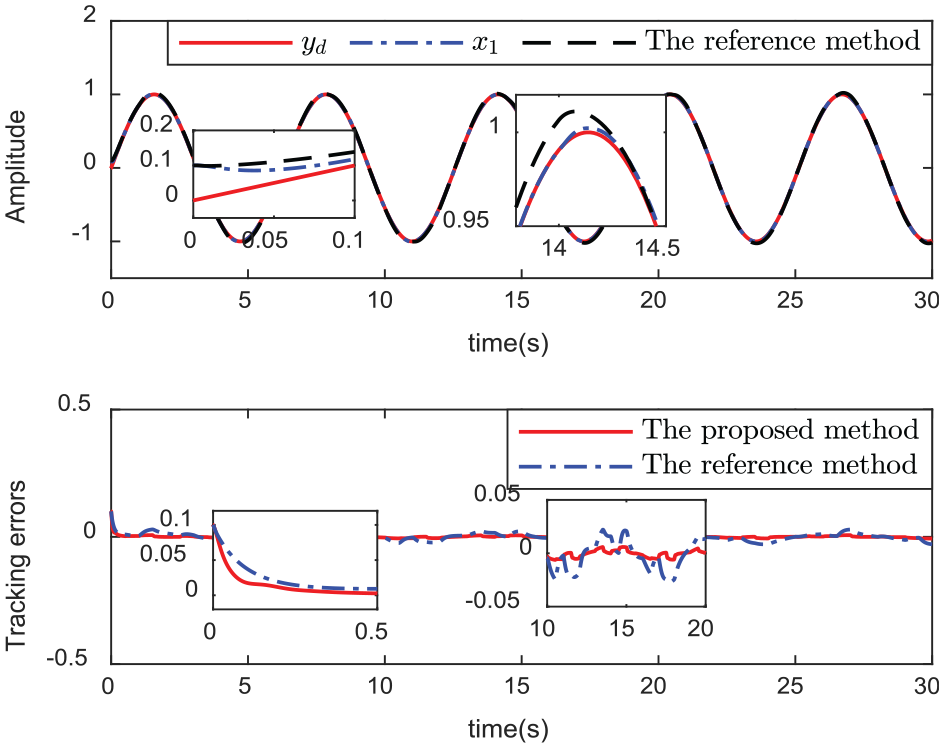
The trajectory of signal tracking of
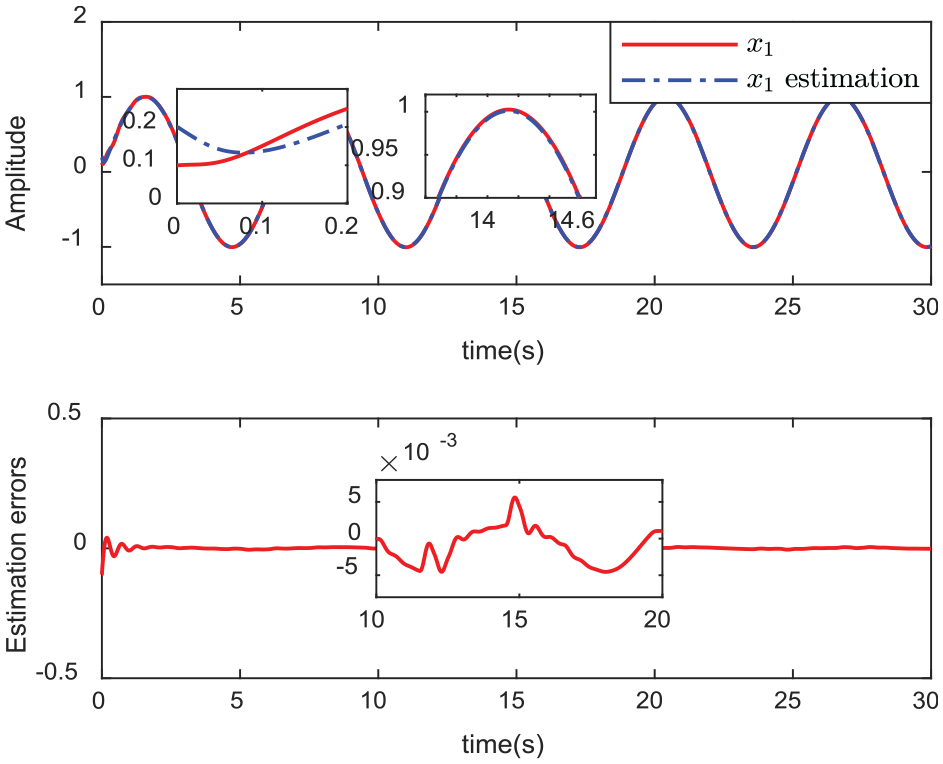
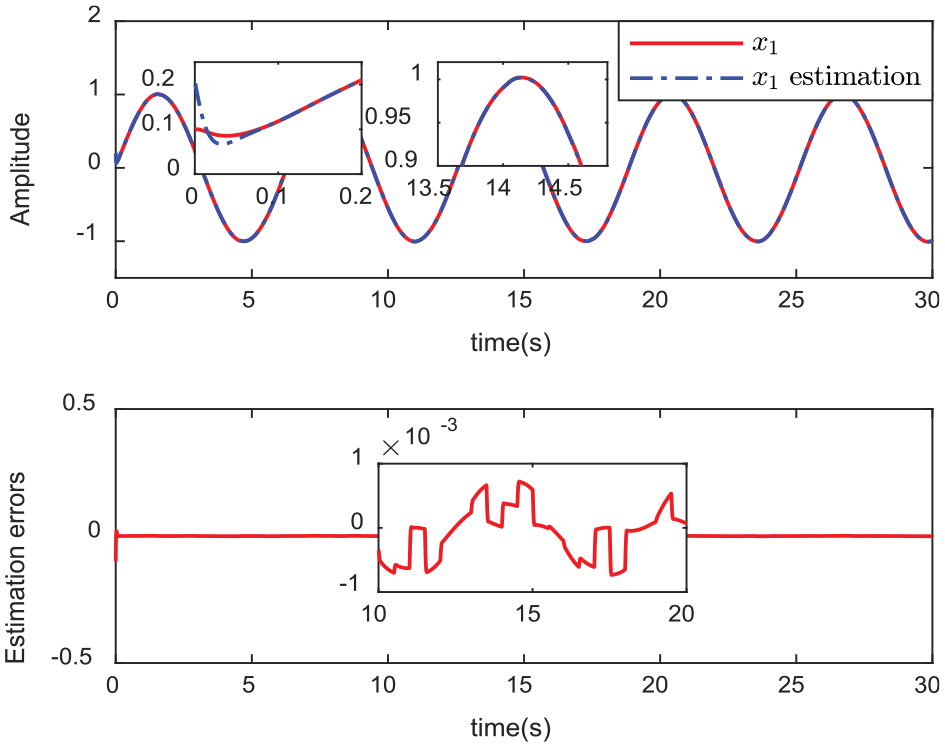
The trajectories of
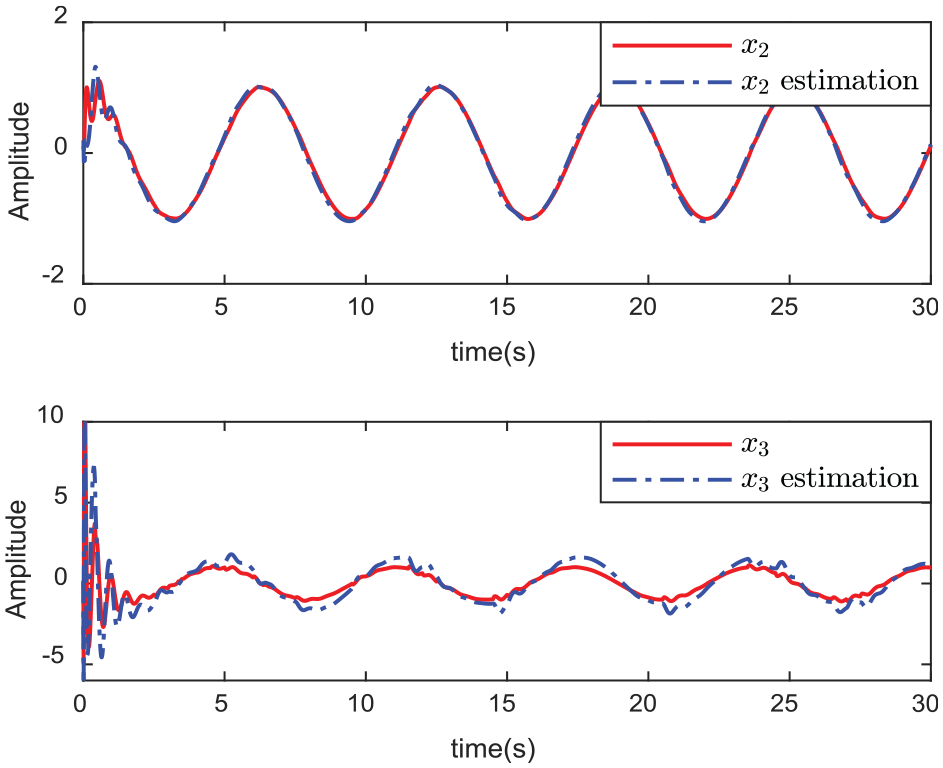
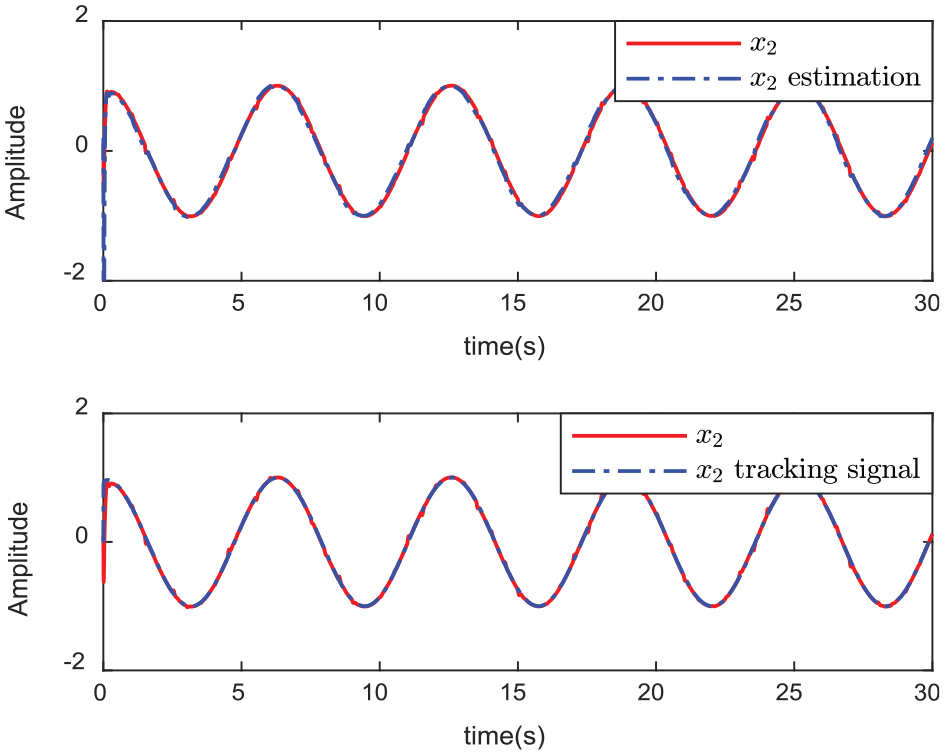
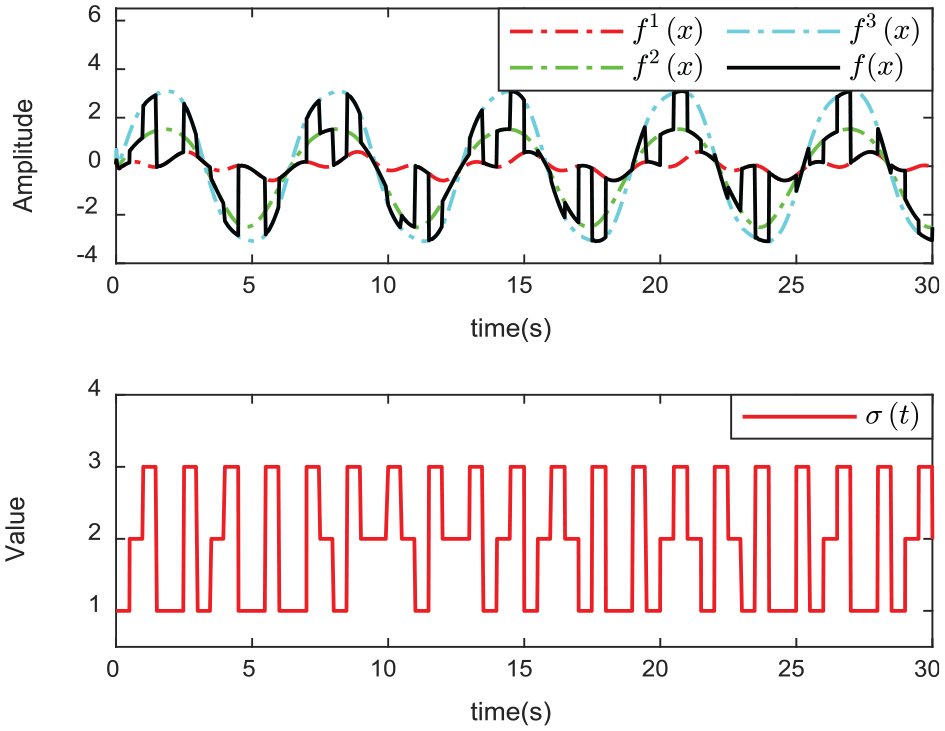
The estimation trajectories of
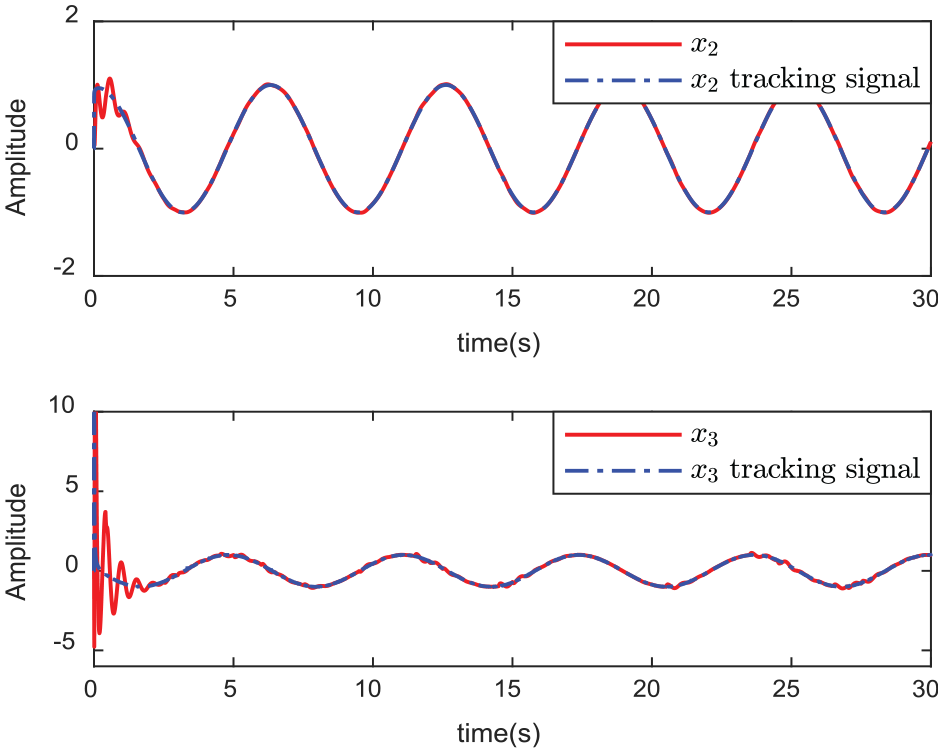
The trajectories of signal tracking of
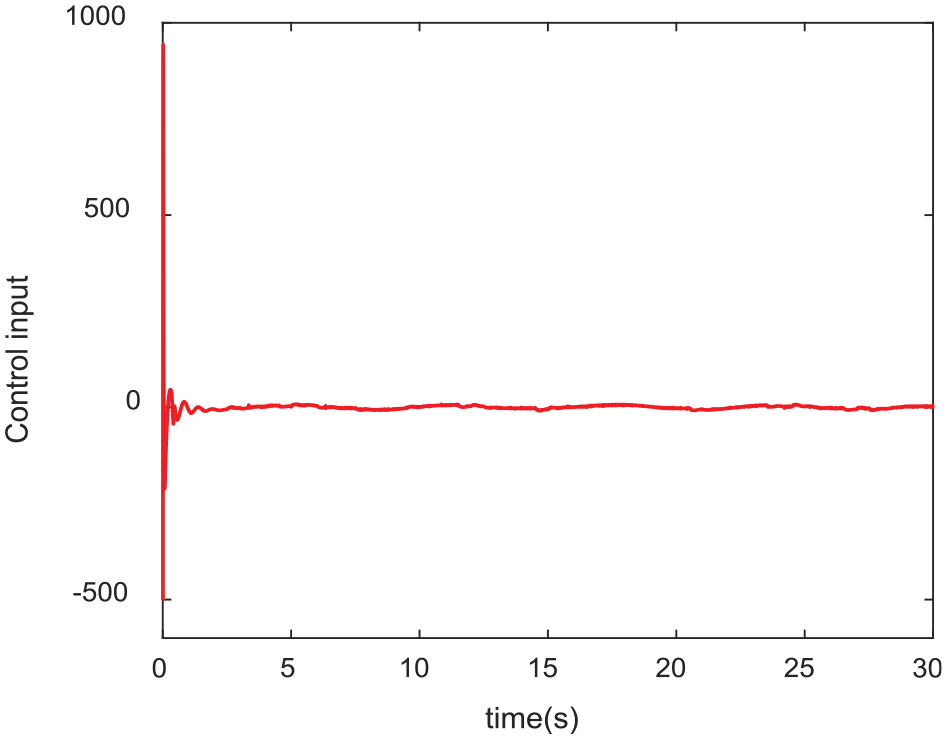
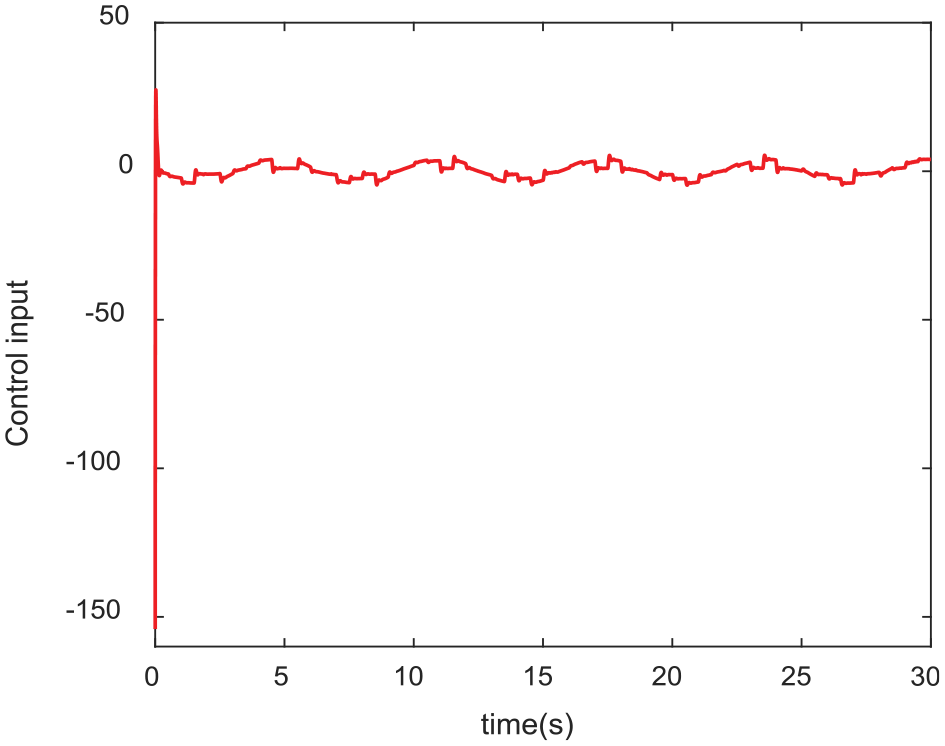
The control input in example 2.
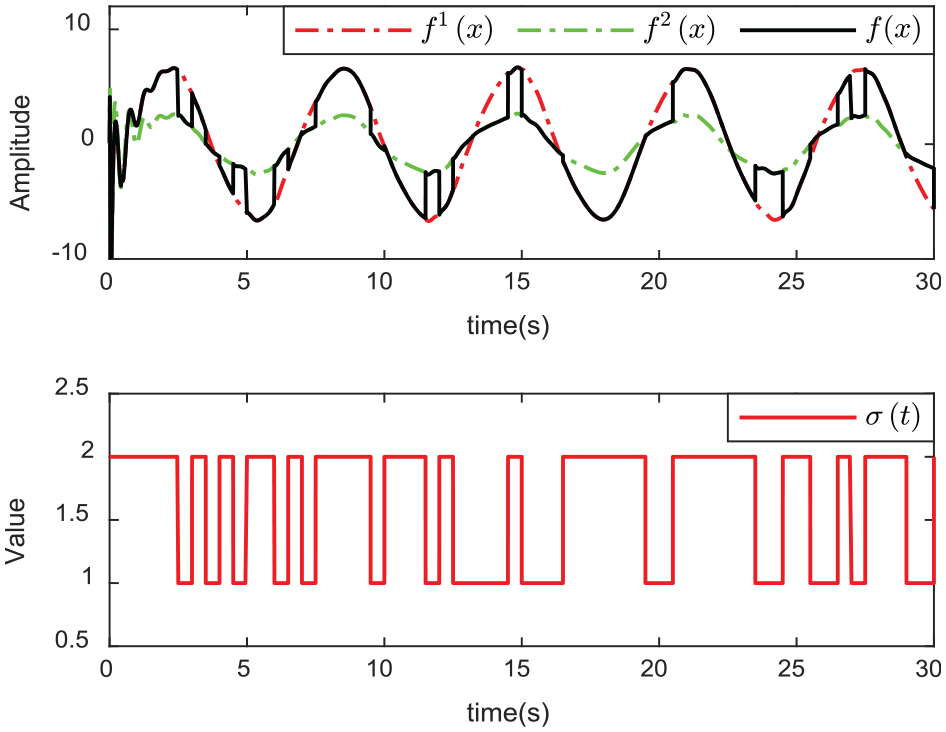
The trajectories of
From Example 1 and Example 2, we can conclude that the proposed controller can stabilize the switched fractional order systems of the equation (15), and the control performance is satisfactory. The designed control law can ensure the convergence of the tracking errors and the boundedness of all signals in the system.
Conclusions
This paper proposes an adaptive neural network backstepping sliding mode controller based on DSC to stabilize the fractional order strict-feedback nonlinear systems. The fractional order nonlinear system under consideration contains arbitrary switchings, unmeasured states, the unknown nonlinear functions and uncertain disturbances. The unknown nonlinear functions and uncertain disturbances are approximated by the radial basis function neural network and an observer is designed for state estimation of the fractional order systems. Fractional order DSC technology is used to avoid “explosion of complexity” and obtain fractional derivatives for virtual control laws continuously. The stability of the closed-loop system is ensured by the constructed Lyapunov functions. Examples and simulation results show that the tracking error can quickly converge to a small region of the origin by the proposed adaptive fractional order control method, and the semi-global stability can be ensured in the closed-loop system. An interesting future topic involves fractional order systems Synchronization control, multi-agent systems control and fractional order model of DC model.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.