
Abstract
Throughout the history of technological progress, attempts have been made to build a machine that looks and behaves like humans. This paper presents a semi-anthropomimetic robot. The robot structure consists of a human-like upper body mounted on a mobile platform (mobile base, cart). The robot uses the three-wheeled mobile platform with two driving wheels and one passive (caster) wheel. The configuration and model of the upper body are represented as an anthropomimetic, compliant robot with antagonistically coupled drives. Robust control is evaluated in order to ensure stability of the robot position. The aim of this work is not the synthesis of control, but rather the examination of the limits of the adopted robot control strategy and the robot behaviour under disturbances (analysis of tip-over stability). The paper analyses both disturbances from the cart motion and external disturbances due to interaction with the environment (external impulse and long term external force). In order to analyse the balance of the robot and to avoid tipping over, different situations are tested and the appropriate dimensions of the cart are estimated (relying on the ZMP calculation).
Keywords
1. Introduction
Different branches of robotics, such as industrial robots, legged transportation systems, automated guided vehicles, medical prosthesis and orthosis, have reached a tremendously high level. However, careful observation of the history of scientific robotics, from its origins back in the fifties to the present day, shows that all the different branches of robotics, in spite of their commercial success and huge impact on society, have still been “side activities”. The mainstream of research in robotics has always been the endeavour to achieve humanoid robots, the future artificial men. It is not surprising to discover that modern robotics was derived from the attempt to design an artificial man [1].
In recent years, we have witnessed an explosive development of humanoid robotics. However, although standard humanoid robots (e.g., Honda's Asimo and Sony's Qrio) mimic the human form, their inner structure is not similar to that of humans. Their mechanisms consist of stiff drives and rigid parts widely used in industrial robotics. This puts severe limitations on the kinds of interaction such robots can engage in, and because of this they are still far from matching the abilities of humans in open environments. In comparison to these mechanisms, the human body represents a highly compliant system, which aggravates control considerably in comparison to ordinarily used actuators. Because of that, the system becomes much more demanding and complex.
Anthropomimetics refers to a new kind of robotics which copies not only the outside form of the human body, but also its inner structures and mechanisms, as faithfully as possible with the aim of achieving a level of performance (manoeuvrability, diversity of motions, etc.) comparable with that of a human. If robots incorporate the same mechanisms as humans, they will also be able to perform everyday tasks in the same environments and utilize the same tools without posing a larger threat, since they will have similar size, weight, force and dynamic properties. This new approach, in a strongly biological paradigm, has been developed over the past few years [2–5].
Nowadays, the main research on humanoid robots focuses on human-like actions (e.g., walking, jumping, running, going up and down the stairs, etc.). These actions indicate a bipedal design. However, an upper body mounted on a mobile platform (cart), a semi-humanoid robot, can access most environments where humans can walk around, thus providing good mobility and flexibility. Although such mobile humanoid robots are not comparable to bipedal robots in copying the human form, they can have a significant advantage in situations where fast manoeuvres and the reaching of a certain distance in a short period of time are required. Therefore, a semi-anthropomimetic compliant humanoid is able to accomplish most household assignments, interacting safely in a human-centred environment. In our research, various simulations are used to emulate several cart motions. We examined longitudinal and lateral accelerations, oscillations in longitudinal (forward-backward) and lateral (right-left) directions, circular motion, and oscillations of the yaw, pitch and roll angles. These motions represent typical situations from everyday life (acceleration, deceleration, driving along a winding or bumpy road, etc.). Also, we included external disturbances (external impulse and long-term external force) in order to emulate interaction with the environment.
In this paper we attempt to establish the cart dimensions to eliminate overturning, and to find the constraints in motion capabilities of the semi-anthropomimetic robot (a structure composed of the human-like upper body, ECCEROBOT 1 , and a mobile platform).
In Section 2 of the paper we give a short overview of related research. System configuration, dynamics and a brief overview of the control strategy of the semi-anthropomimetic robot are presented in Section 3. Finally, in Section 4, we present the critical balance analysis of the robot, through numerous simulations.
2. Background Research
Many different types of mobile humanoid robots have been developed in the past two decades. However, to the authors' knowledge, there are few studies based on an analysis of the dynamic stability and control of wheeled humanoid robots (the robot upper body mounted on the mobile base), particularly under disturbances. Researchers have rarely combined the dynamics of the base motion with the upper body articulation. Most papers are dedicated to the analysis of the bipedal gait [6, 7], quadruped robots [8], and mobile manipulators [9]. The fact that anthropomimetic robot bodies have only appeared recently supports continued work on the topic.
In [10], modelling and control of a robot mounted on a mobile platform and subjected to disturbances is presented. The platform is subjected to random disturbances along its yaw, pitch and roll axes. Analysis of humanoid behaviour and robustness under external disturbances was presented in [11, 12]. In this research typical postures from every-day life and sports are considered, and two sorts of disturbances are applied to potentially compromise the posture (external impulse and long-term external force). Since, the most of interactions between a robot and its environment could be modelled/reduced in this manner, we also use this pattern to explore and cover behaviour of the robot acting in the real world.
Several control methods relying on ZMP (Zero Moment Point) are mentioned in [13]. In [14], concepts of the stability degree and the valid stable region based on the ZMP criterion are proposed. [15] uses the new recursive Newton-Euler method for dynamic modelling and the ZMP criterion. If the ZMP is within the stable region (support polygon), the robot is stable. The stable region is presented by an equilateral triangle formed by the three orthogonal wheels. The crucial part of identifying the ZMP trajectory is the robot waist motion, which has the main effect on the dynamic stability of the robot. Compensation of the motion of the waist is applied to expand the margins of the dynamic balance. Control and simulation of the waist of a wheel-based humanoid robot is presented in [16]. Kinematics and the tip-over stability for a mobile humanoid robot moving on a slope are analysed in [17]. A robot's balance is analysed via the contact forces criterion. This criterion uses the normal forces between the ground and the tyres as a measure for the dynamic stability of the mobile humanoid robot. This research is extended in [18]. In this work, analysis of the tip-over stability on a slope based on the normal supporting forces between the ground and the wheels is presented. The next task, dynamical interaction between the upper body and the mobile platform, is discussed in [19]. Stable supports for the mobile robot are solved with knowledge of the ZMP location and the normal direction of the supporting plane. A different approach to stabilizing wheeled humanoids and mobile manipulators was shown in [20]. In this paper, an optimized control strategy is generated for the whole body motion. An optimization strategy for choosing control parameters is also presented. The combination of these elements leads to motion stability in a number of simulated tasks (e.g., standing, acceleration and deceleration). A similar problem is researched in [21]. The focus of this work is on the effects of the whole body postural control. Another task in this work is to determine which forces imposed on the end-effector do not disturb static stability of the wheeled robot. The dynamic model of a flexible two-wheel upright self-balance humanoid robot is researched in [22].
The tip-over stability of the semi-anthropomimetic robot moving on a mobile platform while interacting with its environment is an unexplored research task. This paper tries to establish the limitations of robot behaviour and robot design in such conditions.
3. Robot Configuration, Dynamics, and Control Strategy
The goal of the ECCEROBOT project was to create a robot by copying the human body so as to replicate its skeleton and its antagonistic tendon drives. Considering its compliant human-like form, such a robot is able to interact with humans and with its environment in an inherently safe way. Unlike standard humanoid robots, which copy the outer human structure, it copies the inner structure as well (joints, bones, muscles and tendons). Consequently, it has the potential for human-like action and interaction. The skeleton of the ECCEROBOT is the most advantageous robot's replication of the human model, consisting of joints and bones formed out of polymorph (caprolactone polymer). Polymorph is a new type of thermoplastic which has a distinctly bone-like appearance when cold, and when heated to 60°C it can be easily moulded. Antagonistically coupled artificial muscles actuate ECCEROBOT joints in a similar way to most human muscles (instead of rigid components and high precision actuators as in typical humanoids). These muscles are represented by a combination of non-elastic threads, elastic tendons and DC motors equipped with gear-boxes. Elastic spring is used to connect non-elastic thread to the robot links. By applying this structure, desirable mechanical compliance is achieved and human muscle and tendon are copied to a large degree of accuracy. Therefore, by following the anthropomimetic principle [2–4], ECCEROBOT is designed for the introduction and exploitation of a degree of self-consciousness.
In this study, the following Maxon motors and gearboxes are chosen for the upper body:
Waist joints use 148877 DC motor RE40 48V and 203116 Gearbox GP42C 15:1
Shoulder joints use 268193 DC motor RE30 12V and 326664 Gearbox GP32HP 51:1
Neck, elbow and wrist joints use 118637 DC motor RE13 12v and 110315 Gearbox GP13A 67:1
Normally, a full humanoid robot involves legs. However, in our project we have a semi-anthropomimetic robot (legs are replaced by a wheeled base, the cart – see Figure 1). The cart is used to perform the global motion i.e., take the robot to the place where some task has to be done. Such a configuration makes the robot convenient for most household jobs. The proportions of the robot are human-friendly. The robot's head matches the height of human eyes in a sitting position, while the hand manipulation area is aimed to be convenient for operating and looking after objects in a household environment.
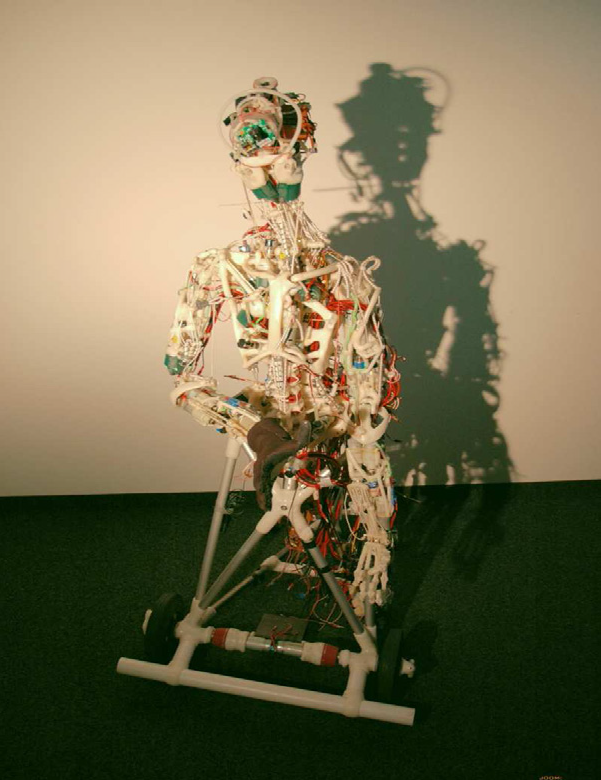
ECCEROBOT placed on the three-wheeled mobile platform
ECCEROBOT is a very complex structure. Copying of the human body is followed by a complicated and demanding compliant mechanism. The human-like nature of the robot and its functionality are hard to describe via a mathematical model. The model of the robot [23] consists of 20 DOF (degrees of freedom): three DOFs in the waist, neck and shoulder joints, and two DOFs in the elbow and wrist joints. These joints form three kinematic chains, and they are linked with segments.
Figure 2 presents the joints actuated by two DC motors working in antagonistic mode. Two different models of the robot joints are adopted. The first one is a triangular joint which represents the elbow joint in humans. This AA (agonist-antagonist) pair, biceps-triceps, is the most illustrative example of the antagonistically coupled muscles in human beings. Motor “a” imitates the biceps, while motor “b” mimics the triceps. On the other hand, the circular joint model is suitable as an approximation of most of the other joints with antagonistic drives. It is used for the neck, shoulder, waist, and wrist rotation. Figure 2 shows the mechanical models.

Antagonistically coupled drives – triangular and circular model
The full dynamics model of the semi-anthropomimetic robot with antagonistically coupled drives is shown in [24] and presented here by equation (1). N-dimensional equation (1) describes the dynamics of the robot with antagonistic actuation. Vector

Note that the above model does not include the cart dynamics. It is assumed that the cart dynamics can be decoupled and solved separately, thus allowing us to consider the cart motion
Now we will briefly describe the ECCEROBOT control strategy. The control algorithm relies on a biologically inspired and energy-efficient approach – the puller-follower concept [25, 26]. The concept has its origins in the biological systems of antagonistically coupled muscles in human beings. The basic idea of the puller-follower approach lies in separation of roles between motors (the agonist and antagonist). One motor, the agonist, initiates the action, while the other one, the antagonist, opposes it. The main issue is how to control the antagonistically coupled electrical drives in order to achieve the desired position of the joint. To fulfil these requirements, the motors should be driven simultaneously in a coordinated way. The first motor (puller), takes the responsibility for the primary control requirement – control of the joint position. Preventing the slackening of the antagonist tendon imposes a secondary control task – maintaining an appropriate tension in the tendon. The second motor (follower) deals with this additional task. Obviously, the joint motors exchange roles (so-called switching) when the motion requires it, usually when acceleration turns to deceleration. It is important to point out that antagonistic motors always have opposite roles. The solution for this problem in multi-jointed systems is proposed in [27]. It was necessary to use robust control, together with nonlinear compensation for the effects of gravity, uncertain effective joint inertia, and dynamic coupling between joints.
4. Robot Balance Analysis
To move and act in human-centred space, a robot needs to ensure safe interaction and reliable behaviour. On the one hand, compliance and appearance make ECCEROBOT attractive for household use. On the other hand, the control issue of such a mechanism is still an open question, as is the manoeuvrability of the robot in a human-centred environment. This section elaborates the critical balance analysis of a mobile anthropomimetic robot under external disturbances resulting from the robot working in a real environment. The ZMP approach [28, 29] is used to provide conditions for the critical design of a mobile platform.
In the analysis, the ZMP point is observed for the different robot tasks and a conclusion about shape and size of the mobile base is made to ensure that the ZMP stable region is inside the boundaries of the mobile base. Due to intensive movements of the mobile base, the robot's waist joint is the most affected and critical from the control standpoint [16]. To demonstrate satisfactory and stable behaviour of the robot torso, the waist joint behaviour is pointed out.
For the current configuration of the mobile wheeled base, it has been shown in [30] that effects of the robot behaviour on the mobile base are negligible, so that the control of the cart may be synthesized independently. Thus, the mobile platform can perform any assigned motion with insignificant influence of the robot, and any disturbances coming from the robot's movement can be easily overcome. On the other hand, the cart motion strongly influences the robot behaviour. The assumption about cart decoupling allows us to explore the robot motion considering the cart motion as prescribed.
The mobile platform is supposed to ensure the robot global motion in an environment (coming to a place where some work is to be done, manoeuvring among environmental objects, etc.). Since the platform motion has a considerable impact on the robot behaviour, it is necessary to examine this influence. The first group of experiments is intended to explore the influence of the platform motion on the robot behaviour and the system design, including cart dimensions. The group consists of the most intensive platform movements that the robot control system (particularly in the waist) can stand. So, we chose the following platform motions that demonstrate the key effects in realistic system exploitation. Firstly, using examples we try to isolate different effects; we then present integrated examples.
Platform moving in a longitudinal direction, forward/backward with constant acceleration/ deceleration. Such motion is present in majority of everyday tasks.
Platform performing a forward-backward oscillation in the longitudinal direction. This motion emulates the inertial effects of non-uniform motion.
Motion in the lateral direction with constant acceleration/deceleration. This example emulates the effect of the centrifugal force.
Oscillation in the lateral direction emulates the inertial effects of driving along a winding road.
Oscillation in yaw angle presenting twisting motion reveals the influence of the change in cart direction.
Gyre (circular motion) – combines some previously mentioned basic motions and emulates effects of turning.
Pitch and roll angle changes appear when robot moves over an undulating or winding terrain.
The second group of experiments explores the robot's interaction with the environment and its ability to keep its balance while operating and completing assigned contact tasks. This group makes a generalization of the previous experiments – in addition to the cart motion, the external force is imposed. Two types of forces are considered: impact impulse forces and long-term forces. These two types cover the majority of practical situations, regardless of whether the forces are expected as a part of some task or whether they appear accidentally. From the standpoint of robot balance, the external forces are seen as disturbance. Again, the waist joint is the most affected and, hence, in our experiments external forces will be imposed on the torso segment. Some examples of planned actions which involve external force are pushing a trolley in a supermarket (long-term force), or hitting a ball during sport activities (impact force) [31]. Accidental external forces may appear when a robot moves through a crowd of people or through an unstructured environment.
In order to ensure safe and effective robot behaviour, a compromise should be made. Size and shape of the mobile platform should be as small as possible to enable robot manoeuvrability, but, on the other hand, a mobile platform base should be sufficient to cover the ZMP stability region in all cases that could appear. Therefore, detailed simulation analysis is carried out thoroughly to make this compromise.
Table 1 gives an overview of the applied movements of the cart: forward-backward motion with constant acceleration/deceleration, forward-backward oscillations, motion in lateral direction both oscillating and with constant acceleration/deceleration, gyre, moving over undulating or winding terrain (changes in pitch, roll and yaw angle).
ZMP point – robot motions

The external forces act horizontally, but from different directions. Two cases (directions 0deg and 90deg) are shown in Fig. 3.

Orientation of the robot and external forces
We start with results obtained for the cases when the platform makes a full circular trajectory with an amplitude of 1m and periods of 3.5s, 3.75s and 4s. Fig. 4 illustrates the ZMP trajectory, while Fig. 5 shows the position of the waist joint as the most affected one during gyre of the platform. Centrifugal effect is obvious but velocities are chosen so as not to compromise the stability of the robot.

ZMP map – Gyre

Position of the waist joint – Gyre
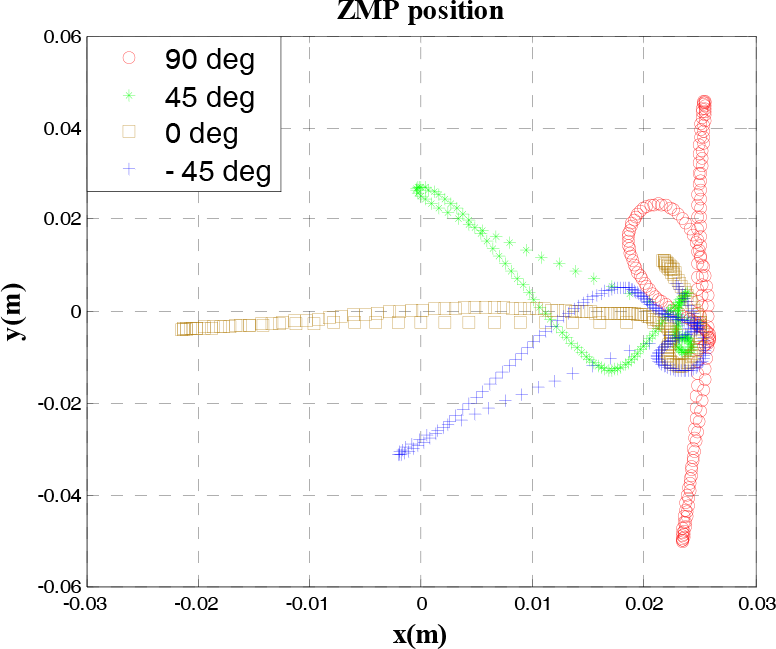
Tables 2 and 3 present the ZMP point when long-term external force and impulse force, acting from different directions, disturb the robot upright position. Figs. 6 and 7 show the ZMP position and the position of the waist joint in cases when the impulse force of 1500N and the duration of Δt=0.01s is imposed on the robot from four different directions: strictly laterally from the robot's right side (90deg measured from the sagittal plane), 45 degrees from the right, strictly frontally (0deg), and 45 degrees from the robot's left. Figs. 8 and 9 show robot behaviour in case of a long term external force. Three levels of forces are presented, magnitudes 120N, 160N, and 200N, all acting in the direction 135deg from the right.
ZMP point – long-term external force

ZMP point – impulse force

ZMP map – impulse force

Position of the waist joint – impulse force
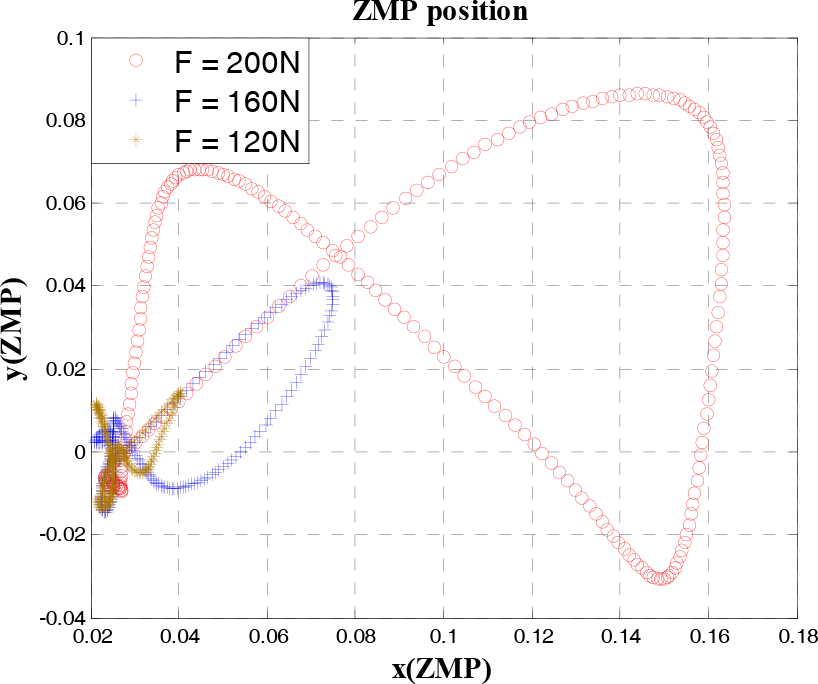
ZMP map – long term force

Position of the waist joint – long-term force
Table 4 includes both challenges for keeping balance – robot motion and external disturbances. Due to lack of space, the table presents only one of the most common cases that occur – an impulse disturbance to the robot moving in a longitudinal direction. Different levels of disturbance are shown, all lasting 0.01s. The upper limits of external disturbance as well as limits in platform velocities are constrained by the capacity of robot control.
ZMP point – motion and external disturbances

The current configuration of the ECCEROBOT platform contains three wheels forming an equilateral triangle. The wheels form the triangle of stability according to the ZMP theory. Although this stable region is sufficient to prevent the robot and platform from overturning, we introduce a more restricted safety region S – a circle inscribed in the triangle. Let its radius be r. Using this safety region we prevent situations when the ZMP point goes to the triangle corners, where the stability region becomes narrow and where balance could be easily compromised due to unpredictable external disturbances. There is another advantage of using a circle as a safety region. It does not restrict the applicability of results to some particular cart shape. The results support triangular shape (three wheels), square shape (four wheels), etc. Therefore, this approach enables easy redesign of the mobile wheel, keeping in mind this circle as the safety region. A quite similar approach is proposed in [15] and [19]. The described convention is:

where
Analysing the simulation results, one notices that the most critical situation (the largest required range of ZMP changes) appears when the robot is affected by an external impulse force. Also, robot motion in longitudinal direction and oscillation of pitch angle force
Keeping in mind that limitations of the robot movement are imposed by the control algorithm and its compliant structure, a robot platform with considered velocities is competitive with other robots designed for providing assistance to humans. In the longitudinal direction velocity reaches
5. Conclusion
Establishing the robot's mobile base dimensions to ensure keeping balance was the goal of this research. Because of its compliant actuation the robot is more sensitive to external disturbances. Our simulation experiments demonstrated how the tip-over stability of the robot can be preserved for some expected movements and disturbances by relying on the appropriate cart design. The design of the cart has been proposed via analysis of robot balance based on the ZMP criterion. The results are encouraging and it has been shown that our semi-anthropomimetic mobile robot could be used for service purposes, i.e., in homes, hospitals, restaurants, museums, etc.
Footnotes
6. Acknowledgments
This work was partly funded by the Ministry of Education, Science and Technological Development of the Republic of Serbia under contract TR-35003.
1
EU FP7 project: Embodied Cognition in a Compliantly Engineered Robot