
Abstract
The single wheel, gyroscopically stabilized robot - Gyrover, is a dynamically stable but statically unstable, underactuated system. In this paper, based on the dynamic model of the robot, we investigate two classes of nonholonomic constraints associated with the system. Then, based on the backstepping technology, we propose a control law for balance control of Gyrover. Next, through transferring the systems states from Cartesian coordinate to polar coordinate, control laws for point-to-point control and line tracking in Cartesian space are provided.
Keywords
1. Introduction
Recently, there has been growing interest in the design of feedback control laws for nonholonomic systems (Kolmanovsky, I. & McClamroch, N. H. (1995)). Due to Brockett's theorem in (Zabczyk, J. (1989)), it is well known that a nonholonomic control system cannot be asymptotically stabilized to a resting configuration by smooth time-invariant control laws (Bloch, A. M.; Reyhanoglu, M. & McClamroch, N. H. (1992)). Despite this, several discontinuous or time-variant approaches have been proposed for stabilizing such systems in (Bloch, A. M.; Reyhanoglu, M. & McClamroch, N. H. (1992)), (Indiveri, G. (1999)), (Tayebi, A. & Rachid, A. (1997)), (Lee, T. C.; Song, K.T.; Lee, C.H. & Teng, C. C. (2001)) and (Kolmanovsky, I. & McClamroch, N. H. (1995)). The references above refer to systems with first-order nonholonomic constraints, which can usually be expressed in terms of nonintegrable linear velocity relationships. However, there is another kind of mobile robot systems, which possess both first-order and second-order nonholonomic constraints, such as our robot – Gyrover, bicycles and motorcycles. Mobile robots have their inherent nonholonomic features, which can be described as first-order nonholonomic constraints among joint velocities and Cartesian space velocities. These arise when robots roll on the ground without slipping. Because no actuators can be used directly for stabilization in the lateral direction, these systems are underactuated nonlinear systems. This induces another nonholonomic constraint of robots. Thus, to compare with these above research works, our mobile robot systems – Gyrover, is more challenging to be controlled.
This paper can provide some ideas for that class of problems. In this paper, we want to control an underactuated mobile robot system – Gyrover. There are two control inputs: one is the steering torque (or rate) and the other is the driving torque (or speed). However, we have four independent generalized coordinates to control: (1) the lean angle, (2) the heading angle, (3) the Cartesian space X axis, (4) the Cartesian space Y axis. Our previous papers (Au, K. W. & Xu, Y. (1999)) and (Au, K. W. & Y. Xu, (2000)) assume that the robot remains around the vertical position, which simplify this nonlinear system to a linear one. Therefore validation of the results can be limited.
Some work has been on the tracking of a rolling disk, such as in (Rui, C. & McClamroch, N. H. (1995)), which assumed three control inputs in the direction of steering, leaning and rolling, where no unactuated joint and no second-order constraint is presented. In (Getz, N. H. (1995)), the author simplified the bicycle dynamic model, and used velocities as control inputs to enable the lean angle (called “roll-angle” in that paper) to track trajectories, which have continuous differentials. However, the controller could not guarantee that the bicycle would not topple over, i.e. the lean angle was out of range, before convergence.
In this paper, we focus on three control problems that have not yet been solved for this robot. The first problem is the balance of the robot while standing. The second problem is concerned with point to point control. The third problem relates to following a straight line. These three problems are of significance in controlling a system with both first-order and second-order nonholonomic constraints.
2. Gyrover
We have developed a single wheel, gyroscopically stabilized robot, Gyrover, over several generations, each one more sophisticated, reliable and capable of better performance (Brown, H. B. & Xu, Y. (1996)). Figure 1 shows a photograph of Gyrover.

A single wheel robot, Gyrover
Gyrover is a novel, single wheel gyroscopically stabilized robot. Figure 2 shows a schematic representation of the mechanism design. In brief, the robot is a sharp-edged wheel, inside of which an actuation mechanism is fitted. The actuation mechanism consists of three separate actuators: (1) a spin motor, which spins a suspended flywheel at a high rate, imparting dynamic stability to the robot; (2) a tilt motor, which controls the steering of the robot; and (3) a drive motor, which causes forward and/or backward acceleration, by driving the single wheel directly.
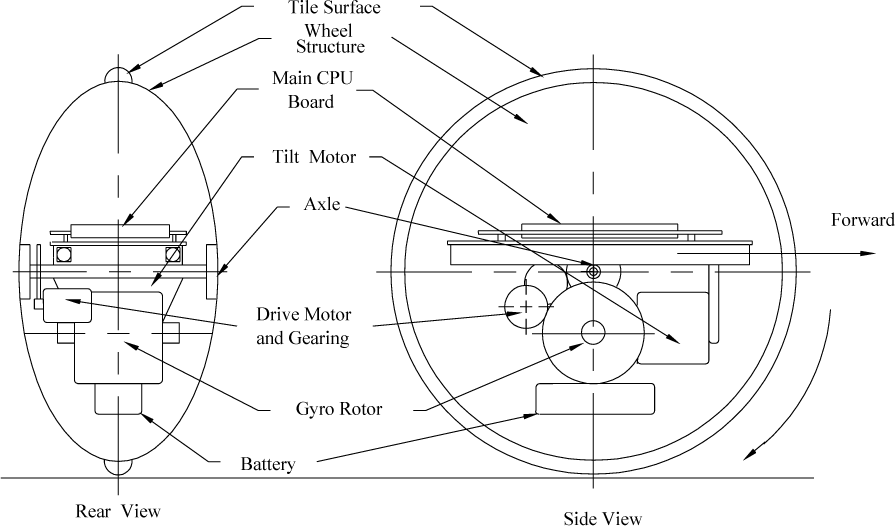
The basic configuration of Gyrover
The behavior of Gyrover is based on the principle of gyroscopic precession as exhibited in the stability of a rolling wheel. Because of its angular momentum, a spinning wheel tends to precess at right angles to an applied torque, according to the fundamental equation of gyroscopic precession:

where ω is the angular speed of the wheel, Ω is the wheel's precession rate, normal to the spin axis, J is the wheel polar moment of inertia about the spin axis, and T is the applied torque, normal to the spin and precession axes. Therefore, when a rolling wheel leans to one side, rather than falling over, the gravitationally induced torque causes the wheel to precess so that it turns in the direction that it is leaning. The robot supplements this basic concept with the addition of an internal gyroscope – the spinning flywheel – nominally aligned with the wheel and spinning in the direction of forward motion. The flywheel's angular momentum produces lateral stability when the wheel is stopped or moving slowly. Gyrover has a number of potential advantages over multi-wheeled vehicles:
The entire system can be enclosed within the wheel to provide mechanical and environmental protection for equipment and mechanisms. Gyrover is resistant to getting stuck on obstacles because it has no body to hang up, no exposed appendages, and the entire exposed surface is live (driven). The tiltable flywheel can be used to right the vehicle from its statically stable, rest position (on its side). The wheel has no “backside” on which to get stuck. Gyrover can turn in place by simply leaning and precessing in the desired direction, with no special steering mechanism, enhancing maneuverability. Single-point contact with the ground eliminates the need to accommodate uneven surfaces and simplifies control. Full drive traction is available because all the weight is on the single drive wheel. A large pneumatic tire may have very low ground-contact pressure, resulting in minimal disturbance to the surface and minimum rolling resistance. The tire may be suitable for traveling on soft soils, sand, snow or ice; riding over brush or other vegetation; or, with adequate buoyancy, for traveling on water.
Potential applications for Gyrover are numerous. Because it can travel on both land and water, it may find amphibious use on beaches or swampy areas, for general transportation, exploration, rescue or recreation. Similarly, with appropriate tread, it should travel well over soft snow with good traction and minimal rolling resistance. As a surveillance robot, Gyrover's slim profile enables it to pass through doorways and narrow passages, and its ability to turn in place to maneuver in tight quarters. Another potential application is as a high-speed lunar vehicle, where the absence of aerodynamic disturbances and low gravity would permit efficient, high-speed mobility. As Gyrover's development progresses, we anticipate that other more specific uses will become evident.
3. Inertia Matrix and Nonholonomic Constraints
The kinematics and dynamics of Gyrover are different from those of unicycles, such as in (Aicardi, M.; Casalino, G.; Balestrino, A. & Bicchi, A. (1994)). The difference lies in the assumption that the unicycle always remains vertical. On the contrary, Gyrover can be considered as a rolling disk which is not constrained to the vertical position and is connected to a high speed spinning flywheel. This model can serve well as a simplification for the study of a model of Gyrover.
Consider a disk rolling without slipping on a horizontal plane as shown in Figure 3. Let ΣoX, Y, Z and Σcx,y,z be the inertial frame whose x−y plane is anchored to the flat surface and the body coordinate frame whose origin is located at a center of the rolling disk, respectively. Let (X, Y, Z) be the Cartesian coordinates of the center of mass (c) with respect to the inertial frame Σ o . Let A denotes the point of the contact on the disk. The configuration of the disk can be described by six generalized coordinates (X, Y, Z, α, β, γ), where α is the steering (precession) angle measured from X-axis to the contact line, β ∈ (0, π) is the lean (nutation) angle measured from Z-axis to the z, and γ is the rolling angle. R is the radius of Gyrover. m, Ix, Iy, Iz represent the total mass and the moment of inertia of Gyrover.

System parameters of Gyrover's simplified model
In the derivation of the model, we assume that the wheel rolls on the ground without slipping. Based on the previous derivation in (Xu, Y.; Brown, H.B. & Au, K. W. (1999)) and letting Sx:= sin(x), Cx :=cos(x), the dynamic model is as follows.



where (X, Y, Z) is the robot's center of mass coordinate with respect to the inertial frame as shown in Figure 3. M(q) ∈ R3×3 and
In order to simplify the control design, we will transform the inertia matrix of the model to a diagonal matrix and reduce the nonlinear terms of the dynamic model. We first intend to cancel some nonlinear terms by letting

Substituting Equation (3) into Equation (1) yields

From the first and third equations in Equation (4) solving with respect to

Due to its “shell” structure, even when Gyrover topples over, the lean angle is not zero, so that Sβ2 > 0 and Mρ > 0 for all t. Then, we let

and obtain
Equation (2) is nonintegrable, which is defined in (Reyhanoglu, M.; van der Schaft, A. J.; McClamroch, N. H. & Kolmanovsky, I. (1999)). Hence, it is the first-order nonholonomic constraint of the robot system. Moreover, we note that no control input is available for actuating directly on lean angle β. This forms a constraint in form of accelerations. G. Oriolo in (Oriolo, G. & Nakamura, Y. (1991)) proposed some necessary conditions for the partial integrability of second-order nonholonomic constraints, one of the conditions is the gravitational term Gu is constant. In Equation (5), the gravitational term varies along β, thus it is a nonintegrable, second-order nonholonomic constraint.
4. Balance Control
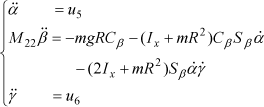
Our first control problem is to enable the robot to stand vertically, i.e., to stabilize the lean angle β to π/2 and
Let the robot system defined in Equation (5) be initially moving in an undesired state and assume all essential state variables are directly measurable. Then find a suitable (if any) state dependent control law[u5, u6]
T
, which guarantees the states
Firstly, we let
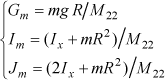
where Gm, Im and Jm are positive.
Then, the dynamic equations become
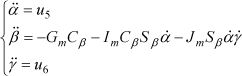
Letting x(i) be the ith time derivative of x, then from Equation (6), we have

where

Let β(0) − π/2 = α,

where V is defined in Equation (10) and k2 is a positive number, which can be designed, and

where, h1(t), h2 (t), h3(t) are defined as in Equation (7).
Any state

converges to the limiting point [0,0, π/2,0,0] T .
To present the proof, we need a lemma.
Proof:
First, since xn(t) is continuous and bounded, for all t, it is stable.
Second, because all of the other states are asymptotically stabilized to some values, thus

Moreover, according to the property of limits, we have

Because xn is uniquely decided by the other states and has a limit as time goes to infinity, xn will converge to the limit decided by the other states.
Then, we address the proof for Proposition 1.
Proof:
First, to prove the subsystem β,

We need to solve two more problems before we can prove the subsystem is asymptotically stable. One is whether

By solving this linear differential equation, we obtain

From σ < π/2, we know that 0 < β < π for all t.
Then, from Equation (10) the time derivative of V is

By substituting Equation (11) into it, we have

Then,

From Equations (10) and (12), we have

We can use the following Lyapunov function to prove

The time derivative of Vα is

By substituting Equations (8) and (13) into it, we have

Then we prove that the condition
If we let V(0) = V0, from Equation (13), and by solving the differential equation, we obtain

By putting it into Equation (8), we have

By solving this differential equation, we obtain

Thus, since
Since Sβ and
From Lemma 1, if we asymptotically stabilize

As V and
5. Position Control
Here, we propose a controller that drives the robot to the Cartesian space origin to study the point to point control problem. This is extremely important, for it serves as the basis for Cartesian space tracking.
Since the origin of the frame XYZO (Σo) in Figure 3 is fixed on the ground, for the purposes of tracking problems, it is more direct to use the point of contact A on the ground to describe the position of the robot, instead of the center of mass. Let (xα, yα) be the coordinates of the contact point A on the ground that coincides with a point of contact P of the robot in Figure 3. xa and ya can be expressed as

Differentiating Equation (16) with respect to time, we obtain

There are two kinds of input control commands for Gyrover: one set of control commands are torques and the other set of commands are velocities. The velocity commands uα and uγ control

Let us consider the robot with respect to the inertial frame XYZO (Σo), as shown in Figure 4.

Parameters in position control
By representing the Cartesian position of the robot in terms of its polar coordinates, which involves the error distance e ≥ 0, measured from A to O (the origin of the frame), Gyrover's orientation θ with respect to the inertial frame, and defining Ψ = θ − α as the angle measured between the vehicle principal axis and the distance vector e. When e = 0, there is no definition for θ and Ψ. Then the following equations are obtained

where e ≠ 0. Moreover, we define Ψ = 0 and
On the basis of the previous considerations, we are now ready to address the aforementioned closed loop steering problem in the following general terms.
Let the robot system be initially located at any non-zero distance from the inertial frame and assume that all state variables required are directly measurable. Then find a suitable, if any, state feedback control law [uα, uγ]
T
which guarantees the state [e, β − π/2,

where Sgn, k3 and k4 are defined in Equations (21) and (22), k4 is a positive scalar constant and k4 < k3 − 1, which can be designed.
Any state (e, β − π/2,
Proof:
First, let Sgn(.) be a sign function described as follows:

Let k3 > 2 be a positive scalar constant, which can be designed and should be less then αmax. Let

Set

The time derivative

where

Substituting Equations (22) and (20) into Equation (18), we obtain

Such that

Thus V1 is positive definite and
Since R, k3, k4, Sβ and uk are positive,

In these cases
Moreover, CΨ = 0 is not a solution, which is evident from Equation (19). By substituting uα and uγ into Equation (19), we have

Because β → π/2,

Since k3 − 1 > k4 > 0, during any sampling period,
6. Line Tracking Control
For a mobile robot, such as Gyrover, most traveling tasks can be realized by following connected segments of straight lines. For example, Figure 5 shows a mobile robot's travel path along a series of connected corridors.

The robot's path along connected corridors
How to realize the straight line following while keeping the robot vertical is our control problem. As depicted in Figure 6, where (x2, y2) is the coordinate of the second point, let us consider Gyrover initially positioned at a neighborhood of the origin (i.e., the start point) and standing almost vertically, about to take a straight line so as to approach the second point.

The parameters in line tracking problem
Let us define r, e and d, which are nonnegative, as the distances from A to origin, the line and the second point, respectively. θ and φ are defined as in Figure 6. Then, we have the following equations

where

On the basis of previous considerations, we are now ready to address the aforementioned closed loop line tracking problem in general terms.
Let the robot initially locate at some neighborhood the origin and assume that all state variables be directly measurable; then find a suitable (if any) feedback control law [uα, uγ]
T
that guarantees the state [β − π/2,

where f2 is defined in Equation (27).
Any state, starting from [β(0) − π/2, β(0), e(0), d(0)] with 0 < β(0) < π and e(0) > 0, converges to the point[0,0,0,0] T .
Proof:
First, we introduce some definitions.
Sgn(.), k3 and uk are defined as in Equations (21) and (22).
Let Θ (.) be a sign function described as follows:
We let

where k5 is a positive scalar constant which can be designed and should be less then
Set
The time derivative

where
Since r, R, f2 and uk are nonnegative,
V1 is positive definite and

Thus,
7. Experiment
An on-board 100-MHZ 486 computer was installed in Gyrover to deal with on-board sensing and control. A flash PCMCIA card is used as the computer's hard disk and communicates with a stationary PC via a pair of wireless modems. Based on this communication system, we can download the sensor data file from the onboard computer, send supervising commands to Gyrover, and manually control Gyrover through the stationary PC. Moreover, a radio transmitter is installed for a human operator to remotely control Gyrover via the transmitter's two joysticks. One operator uses the transmitter to control the drive speed and tilt angle of Gyrover. Hence, we can record the operator's driving data.
Numerous sensors are installed in Gyrover to measure state variables. Two pulse encoders were installed to measure the spinning rate of the flywheel and the wheel. Furthermore, we have two gyros and an accelerometer to detect the angular velocity of yaw, pitch, roll, and acceleration respectively. A 2-axis tilt sensor was developed and installed for directly measuring the lean angle and pitch angle of Gyrover. A gyro tilt potentiometer is used to calculate the tilt angle of the flywheel and its rate change.
The on-board computer runs on an OS, called QNX, which is a real-time micro-kernel OS developed by QNX Software System Limited. Gyrover's software system is divided into three main programs: (1) communication server, (2) sensor server, and (3) controller. The communication server is used to communicate between the on-board computer and a stationary personal computer (PC) via an RS232, while the sensor server is used to handle all the sensors and actuators. The controller program implements the control algorithm and communicates among these servers. All programs are run independently in order to allow real-time control of Gyrover. To compensate for the frictions at the joints, we adopt the following approximate mathematical model:

where
μ v ∈ R3×3 is the viscous friction coefficient;
μ d ∈ R3×3 is the dynamic friction coefficient;
μ s ∈ R3×3 is the static friction coefficient.
We have μ v = diag{0.17,0.15,0.09},
μ d = diag{0.1,0.1,0.07}, μ s = diag{0.3,0.25,0.1}.
7.1. Balance Control
The purpose of this set of experiments is to keep Gyrover balance. Some experimental results are shown in Figure 7 and Figure 8.

Camera picture in balance control

Sensor data in the balance control
Despite several successful examples, control laws sometimes failed. We believe this is because the initial condition already went out to the domain D in Proposition 1. With regard to balance control, the initial condition seems to be too narrow for the constraint, σ < π/2. If we make a small modification to u6 as follows, the controller can be used in a wider range of initial conditions.

where k1 is a positive number, which can be designed. To prove the subsystem β,

Its derivative is

7.2. Position Control
In this experiment, Gyrover is required to move from a Cartesian space point (x0, y0) to the original point of the Cartesian space, where x0 = 3 m and y0 = 4 m. We mount a high resolution 2/3″ format CANON COMMUNICATION CAMERA VC-C1 on a tripod. The camera had been calibrated and we have mapped the field of vision to the Cartesian space coordinate which is anchored on the ground. The camera has a pixel array with 768(H) × 576(V). In order to communicate the data, an interface board (digital I/O) is installed in a PC and there are wireless modems to connect the PC and Gyrover. The first problem experienced was that the system states exhibited highly oscillatory behavior and the second was that control inputs sometimes needed to switch too sharply and fast. Both will cause difficulties for real time control and result in worse performance. To solve these problems, we propose to replace the sign functions in the controllers with tanh functions.
Let Tanh(.) be a bipolar function described as follows:

where k6 is a positive scalar constant, which can be designed.
Let Uanh(.) be a unipolar function described as follows:

where k7 is a positive scalar constant, which can be designed.
We substitute Sgn(.) and Θ(.) with Tanh(.) and, respectively. However, that they have different values is a problem, if x = 0. In a real time experiment, x = 0 very seldom appears and can not be maintained, because there is too much noise. Thus, it is safe to perform the suggested substitution from this point of view. The trajectory that Gyrover had traveled is shown in Figure 9. A number of sensor reading results are shown in Figure10.

Trajectories in the point-to-point control

Sensor data in the point-to-point control
7.3. Line Tracking
In this experiment, Gyrover is required to travel a straight path which is about 5 m long. The trajectory that Gyrover traveled is shown in Figure 12. A number of sensor reading results are shown in Figure 13.

Experiment in line following control
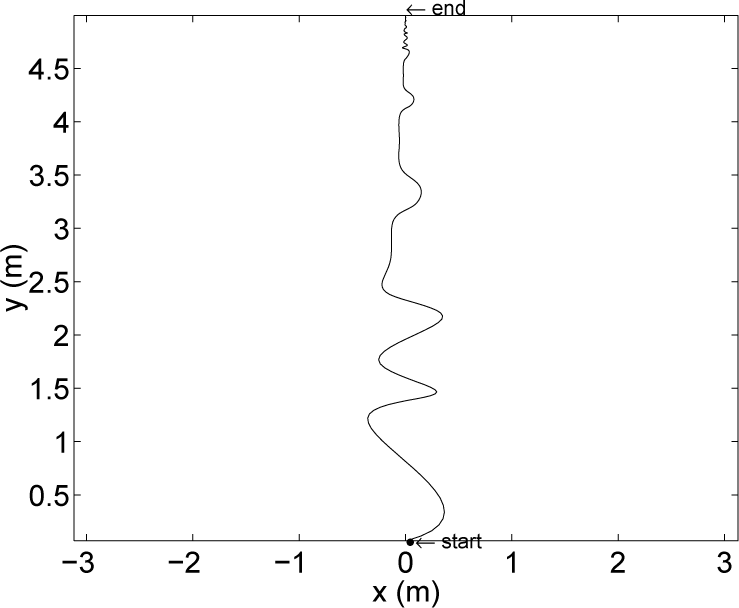
Trajectories in the straight path test

Sensor data in the straight path test
8. Conclusion
In this paper, we studied control problems for a single wheel, gyroscopically stabilized robot. We investigated the dynamics of the robot system, and analyzed the two classes of nonholonomic constraints of the robot. We proposed three control laws for balance, point-to-point control and line tracking. The three problems considered are fundamental tasks for Gyrover control.
Footnotes
Acknowledgment
This work is supported in part by Hong Kong Research Grant Council under the grants CUHK 4403/99E, CUHK 4228/01E and Hong Kong SAR Government under grand ITS/140/01.