
Abstract
We studied how a fellow passenger robot influences drivers. The fellow passenger robot was designed to move and speak as if it knows the surroundings of the car. We conducted experiments with a driving simulator and evaluated the effectiveness of the robot with various methods. We used questionnaires to ask for impressions of the driving experience for the participants after the driving experiments with the fellow passenger robot. In addition, the car speed, acceleration and steering angle were measured during the driving experiments. Some significant differences between experiences with and without robot were found in the results with regard to impression evaluation and average speed. Therefore, we found that the robot makes driving more enjoyable and that drivers drive slower than without the robot.
1. Introduction
At present, the technology for driving support is a focus of some attention and car interface robots have been developed. For example, Pioneer has developed Carnaby and ROB [1]. They tell the direction for turning by pointing with their arm or the colour of traffic lights with its own light on the body. NISSAN's Pivo 2 [2] uses words to advise and encourage the drivers. AIDA, developed by MIT Media Lab and Volkswagen [3], suggests the best route by the analysis of past routes.
As we can see by these examples, interface robots give driving information with voice and/or movement. It is expected that drivers' stress will be decreased, since drivers can intuitively get driving information, such as the driving direction, the colour of traffic lights and whether they are obeying the speed limit. Moreover, a pleasant psychological effect is intended by the interface robot. Ohta et al. [4] have proved that joint attention and eye contact with the interface robot cause an attachment to it in drivers.
On the other hand, there are worries about driving safety because communication with the interface robot can take the drivers' eyes off the road. However, they can drive safely even when they talk with fellow human passengers, which is why we think that communication is compatible with a safe drive. Moreover, we suppose that if the interface robot changes the communication according to situations, like a human fellow passenger, it will not interfere with the driving and so any drivers can concentrate on their work.
Aragane et al. [5] have proposed a system to control communication using various information about the surroundings such as the steering angle, brake oil pressure, and the accelerator pedal angle, etc. It has shown that the benefit for traffic accidents of the system is superior to that of a handsfree cellular phone. In addition, Jonsson et al. [6] have shown how emotional interactions influence the safety of driving. The interaction with a voice that matched the driver's own emotional state improved the driving performance significantly better than the interaction with a mismatched one.
Thus, we use a fellow passenger robot which makes utterances about movement determined by the driving situation so as to enable a safe and delightful drive, evaluating various effects from the viewpoints of psychology, physiology and driving operations. The evaluation of impressions of driving by a questionnaire is made use of as a factor analysis. Moreover, opinions about the robot are requested in a free description column. The driving operation of each participant is analysed, such as the steering entropy, the acceleration skewness and the average of speed. Furthermore, we evaluate the stress value observed as a physiological index.
The outline of this paper is as follows. In the next section, we describe the equipment used in this study and the procedures of the experiment, as well as the methods to examine the effects on a driver's psychology, physiology, and operation by the fellow passenger robot. In section 3, we show the experimental results. Finally, we conclude this paper in section 4.
2. Experiment
2.1 Fellow Passenger Robot
We developed a robot jointly with DENSO Corporation for this study and designed it to behave like a fellow passenger that speaks and expresses its emotions. Fig. 1 shows an overview of the interface robot used in the experiment. The fellow passenger robot can make movements with two degrees of freedom: one of them is the head rotation about the vertical axis of the head and the other is the motion of opening and shutting the mouth. It performs various movements with combinations of shaking the head right and left, opening and shutting the mouth with 6 coloured light-emitting diodes located on the eyes and ears. When it warns drivers, we use the red light and a quick motion. Head shaking is used mainly for expressions of unpleasantness, but a slow one is for pleasantness. The degree of mouth opening depends upon a level of surprise. The fellow passenger robot can speak with movements according to a situation which is recognized by receiving information from a driving simulator.

Overview of the fellow passenger robot
Table 1 shows some patterns of the fellow passenger robot's movement. There are also contents of utterance in Table 1. Some relate advice about driving, while others mark chat. For example, if the driver exceeds the speed limit, the fellow passenger robot will say “I fear. Please reduce the speed” and shake its head quickly while blinking its eyes and ears red. Also, if the driver drives safely, obeying the speed limit and maintaining the distance between his car and the car ahead, the robot says “Hey, it's a good day for driving” and shakes its head slowly after talking.
Motions of robot

2.2 Driving simulator
Figs. 2 and 3 show the composition and an overview of the experimental system. The main computer simulates the driving scene using the data from the handle, the accelerator and the brake. The projector and the speakers express the images and sounds. An external computer enables the fellow passenger robot to move while being connected with driving situations. The robot is settled on the left of the handle; from the driver's point of view, it is seen in the lower left corner of the screen. Moreover, the driver can see their speed and engine speed on the meter to the right of the handle.
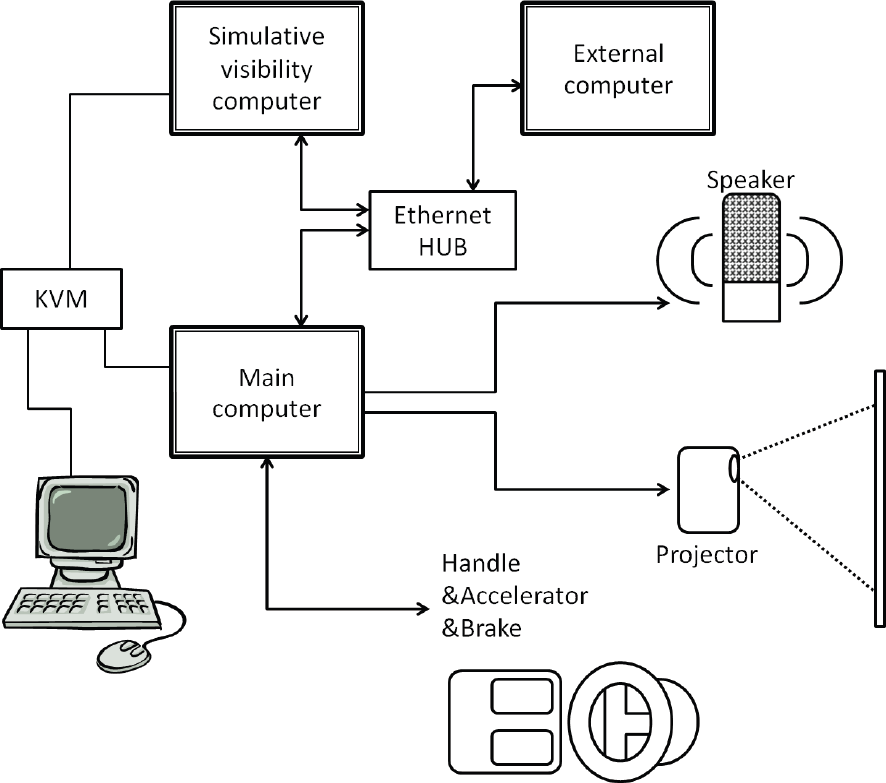
Composition of the driving simulator

Overview of the experimental setup
In the experiment, we use an un-forked course of highway. Fig. 4 shows the map of the course by X-Y coordinates. The starting point is at (-37, −1865) and the goal is at (8750, 115). The length is about 9 km and it needs about 7 minutes to finish driving the course.
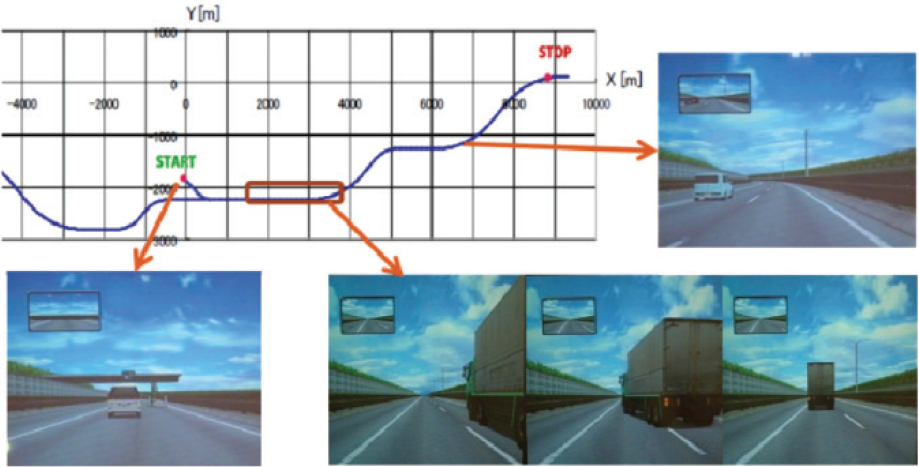
Map of the highway course
2.3 Procedure for the Experiments
We asked the participants to drive using the driving simulator with and without the fellow passenger robot. The impression of the participants might be changed by the order of the two experiments with and without the fellow passenger robot. To cancel the order effect, we have the two groups of participants. The participants in group A (13 male, 10 female) drove without the robot initially and then drove with the robot. The participants in group B (12 male, 10 female) drove with the robot before they drove without the robot. The participants are university students aged between 19 years and 29 years old who all have their own driver's license.
Table 2 shows the timetable of the experiment. While the participants were driving, we measured an electrocardiogram, gaze direction and information about their driving operations. After driving, the participants were asked to fill out the questionnaire.
Timetable of the experiment


2.4 Methods of Evaluation
First of all, in order to study effects on the psychological side, we evaluated their impressions of driving by using the SD (Semantic Differential) method [7] on a 7 point scale. Table 3 shows the pairs of adjectives used in the experiments. These pairs were selected from a free discussion about driving the car with multiple people. We decided to evaluate the impression of driving instead of the impression of the fellow passenger robot. We conducted a factor analysis of the results of the impression evaluation and analysed what their impression of the drive was and how it was changed by the fellow passenger robot. Moreover, we asked the participants to write about their impression of how the drive had felt in the free description column.
Pairs of Adjectives

From the information of the driving operation, steering entropy and acceleration skewness are calculated from the data of the steering angle and the car speed. In any case, we used the data of the period from when the car's speed exceeded 1. 0 m/s until the robot or the experimenter told them to stop the car.
According to the steering entropy method [8] [9], we estimate the steering angle when the driver operated it most smoothly from the last 3 elements of data and then calculated the difference between the predictive steering angle and the value actually taken. It is based on the view that drivers hold expectations about the state of the road ahead and operate the handle smoothly when concentrating normally; however, when there is some burden besides the driving operation, they cannot handle smoothly. In other words, the larger entropy corresponds to a heavier burden for the driver. To cancel the difference in steering entropy among individuals, we used the ratio between the value of the steering entropy with robot and that without the robot for each participant.
Acceleration skewness [10] is calculated with Equation (1). It enables us to estimate how to step on the brake and accelerator pedals. S is the acceleration skewness, T is the time of driving, α(t) is the data about acceleration (0 ≤ t ≤ T), ̄α is average of acceleration and σ is the standard deviation of acceleration.

As the evaluation of the physiological side, we use the stress value [11] calculated from the ECG data. We performed a frequency analysis, after which we transformed the data of the R-R interval into the data of the invariable interval by re-sampling. The section from 0.04 Hz to 0.15 Hz is called the low frequency range while that from 0.15 Hz to 0.4 Hz is the high frequency range. The ratio of the ranges LF/HF shows the stress value. Because the stress value is different among individuals, we also measure ECG at the rest condition before driving and standardize the stress value in the driving condition by that at rest. The standardized values are used for a comparison of the cases without the robot and with robot.
3. Results and Discussion
3.1 Evaluation of Impression
3.1.1 Factor Analysis
We performed a factor analysis of the questionnaire. Table 4 shows the factor loadings. We named the 4 factors ‘pleasant’, ‘security’, ‘silence’ and ‘burden’. Fig. 5 shows that the scores for pleasant and burden grow while those for security and silence decrease with the robot. Each factors' effect size (Cohen's d) is 0.72, −0.29, −1.19 and 0.25. We tried a T-test with the result that there was a significant difference in pleasant and silence between situations with the robot and those without it. When we drive with the robot, we experience much more pleasantness and merriment (or noise) than without the robot.
Factor loadings


Average of the factor scores
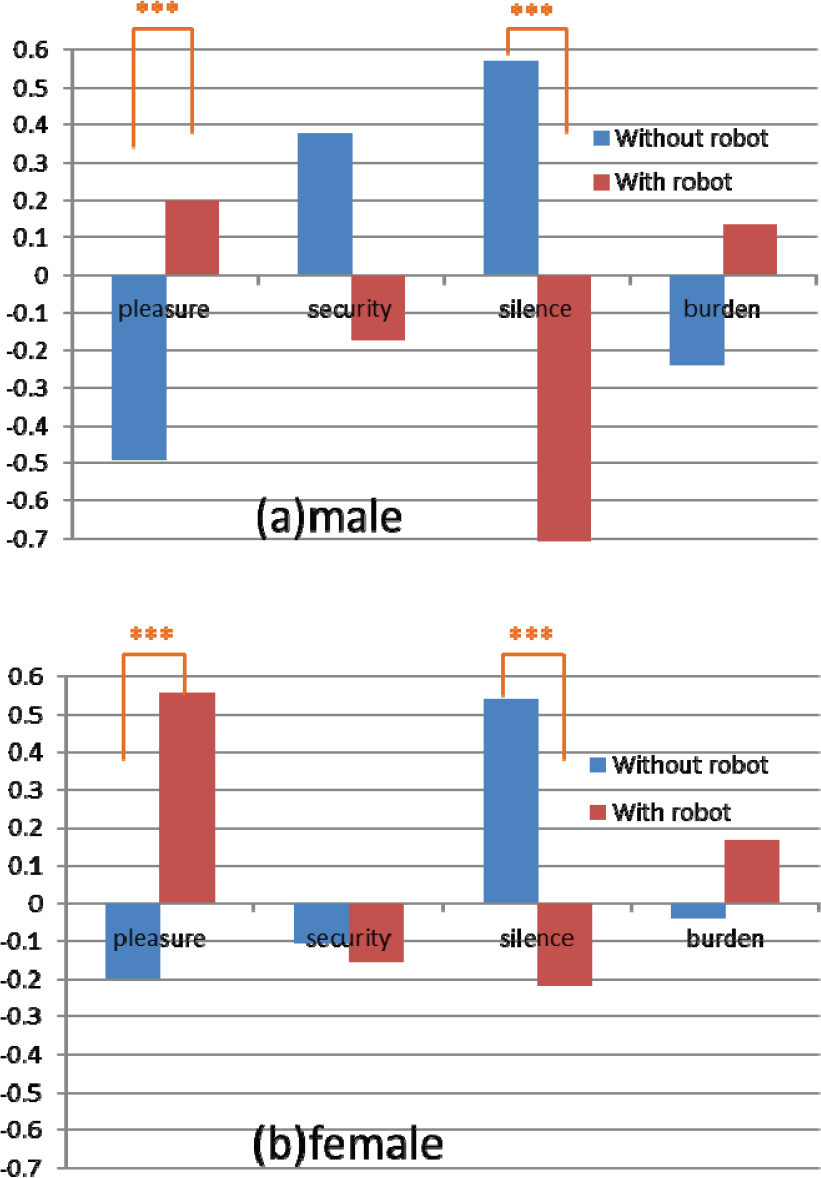
Differences between males and females
We also compared the scores of males with those of females. Both of them witness a significant difference in pleasure and silence between situations with the robot and those without it. However, there are differences between males and females in the score values. The females' scores of pleasure are higher than those of males', while the scores of silence for males decreases much more than those for females when they drove with the fellow passenger robot. Thus, we found that females are able to enjoy driving with the fellow passenger robot more than males and do not feel that the robot is noisy.
3.1.2 Free Description
In the column for free description, there are as many affirmative opinions as there are critical opinions as to the robot. For example, “it's cute”, “it gave me good advice”, “it's noisy”, “I can't concentrate because of the robot.”
3.2 Driving Operation
3.2.1 Steering Entropy
Fig. 7 shows the steering entropies during the drive experiments. There is a significant difference between circumstances with robot and those without it when we attempt a T-test among group A only. The steering entropy decreases in the case with robot in comparison with the case without the robot. We think that the robot contributes to the improvement of concentration on driving.

Average steering entropy of group A
3.2.2 Acceleration Skewness
Fig. 8 shows the acceleration skewness. Almost all of the data about acceleration skewness was increased, meaning that acceleration was swift and deceleration was slow. The brake pedal was hardly stepped upon because a highway course was used in this experiment.

Average of the acceleration skewness
Acceleration skewness saw no significant difference. However, the average value of the acceleration skewness in the case with the robot is lower than that in the case without robot. We think that the accelerator stroke was stepped upon more slowly because of the robot. In fig. 9, we checked the data for the accelerator stroke at the moment of the robot's warning and observed that drivers slowed the car down when they were warned. This result means that the drivers obey the robot, and therefore the safety of driving increases when the robot gives appropriate advice.

Relationship between the accelerator stroke and the robot's warning.
3.2.3 Average of Speed
Fig. 10 shows the averages of speed during the drive experiment. The average of the speed is smaller in the case with robot than that without the robot and a significant difference is observed (P<0.01). Since the significant difference in the average speed is also observed for drivers who have no warning from the robot, the other interactions also seem to have the same effect. From this result, a question arises as to whether the drivers really did concentrate on their work with the robot. If they decrease the speed because they were preoccupied with the robot, this means that it is very dangerous to drive with the robot. However, the results of steering entropy show that they were not disturbed by the robot. Consequently, the drivers drove at a lower speed safely.

Average of speed (a) of all participants (b) of all participants with no warning by the robot about speed
3.3 Stress Value
The results of the stress values are shown in Fig.11. Although the average of the stress value in the case with the robot is higher than that of the case without the robot, there is no significant difference. Therefore at least it does not seem to give drivers extra stress.

Stress value
4. Conclusion
To research the fellow passenger robot's effect on drivers, we conducted a driving experiment with a driving simulator. In the experiment, the case with the robot and the case without the robot are compared for 45 participants. As a result of the experiment, we found that there are some effects by the fellow passenger robot on drivers.
From the psychological experiment, it was found that the robot increases the pleasantness and enjoyment of driving. In addition, a difference between males and females was found in that the robot can attract females rather than males.
By the results of the analysis of the driving operation, the effect of the robot in reducing the average of speed is shown.
On the physiological side, we could not find any significant difference. Therefore, we think that that it does not cause drivers any extra stress.
In future work, we are planning to study the effect of each interaction to design it better for safer and more pleasant driving.
Footnotes
5. Acknowledgments
This research was supported by DENSO Corporation. We are grateful to them for their support.