
Abstract
This paper mainly solves the problem of 2D minimally persistent formation control in which three co-leaders are in a cycle, which raises a great challenge in the area of persistent formation control. First, a novel control law is proposed for this problem. The fundamental moving principles of the agents are well-designed based on the property of persistence, and the non-square rigidity matrix is converted into the square one for the design of the control law. Then, the method of leading principal minor is utilized to prove that the formation with the above control law can be stabilized. Finally, simulation results show that the proposed controllers are able to stabilize the group formation to a rigid shape, while keeping the distances between the agents to the desired value.
1. Introduction
In recent years, many research papers [1–10] have indicated different ways of solving the problem of fulfilling tasks using a formation. This paper however proposes a minimally persistent formation controller to maintain the distance of the agents continuously based on the concept of rigid control [11, 12]. Furthermore, different from the previous work, what we are dealing with is formation control based on a directed graph, rather than undirected. This type of the rigid formation has been termed as the persistent formation [13–23].
The underlying graph of the directed formations may be either cyclic or acyclic. Formation control with an acyclic graph is easy dealt with because of its particular structure, where the follower agents cannot influence the leader agents. However, formation control with a cyclic graph has well-known difficulties, since the control of the leader agents may be affected by the follower [18]. In the area of distance maintenance control with a cyclic graph, some authors have made some contributions [15, 23–25]. Baillieul [19] proposed a method of formation control considering the distance measurements in a cyclic structure, but he did not research how to maintain the distance of all the agents. Hendrix [15] then discussed the possibility of keeping the distance between every pair of agents constant in a cycle graph and raised the concept of minimally persistent formation, but the specific control of the whole formation was not analysed. Furthermore, Yu [17] researched the special control law in a minimally persistent formation with a leader-first-follower variety in the plane and tried to design the control law using a rigidity matrix. However, he only considered the one-leader situation in which the followers are in a cycle. Moreover, in the research of leaders in a cycle, Anderson [25] considered a control law for a formation with only three agents named three co-leaders, but he did not explain the topology relationship of the followers.
To the best of our knowledge, all the aforementioned papers share the following common drawbacks: one-leader model for minimally persistent formation cannot complete the complex mission very soon and it is difficult for one leader to find out the goal in a complicated environment as soon as possible. Consequently, the one-leader model is an important factor limiting the performance of the whole formation. In addition, all the algorithms based on the one-leader model seem to have poor scalability and lack adaptability and flexibility to both tasks and environment.
To overcome the aforementioned drawbacks, a multi-leader architecture is necessary. Yu [17] mentioned that only the minimally persistent formation systems with three leaders can be stabilized. Therefore, the problem of minimally persistent formation control with three co-leaders is discussed in this paper. In the three co-leader model, the three co-leaders are equivalent. In addition, the non-square rigidity matrix, which indicates the distance of all the agents, is introduced in the design of the control law to deal with the timeliness problem.
The primary contribution of this paper is the proposing of a novel control law using a non-square rigidity matrix for minimally persistent formations, in particular, under the condition that the three co-leaders are in the cycle. Firstly, since the leaders and followers have different types of the moving principle, we devise different control laws for them respectively. Secondly, during the course of designing the control laws, the novel method of converting the non-square rigidity matrix into the square one is discussed in detail. Thirdly, it is necessary to consider the situation where the followers are in a cycle and when they are not. Finally, we do the simulations in which the followers are in the acyclic and cyclic graphs to prove the efficiency of the proposed control law.
2. Preliminaries
2.1 Graph rigidity
Before introducing persistent formations in a directed graph, it is necessary to know the underlying rigid formations in an undirected graph. Let G = (V,E) be an undirected graph with n vertices; denote the composite vector p=(p1,p2,…pn)∈R2n and a pair (G,p). pi(i∈{1,2,…,n}) represents the coordination of the ith vertex in the place.
Denote the constant parameter dij=|pi-pj| as the Euclidean distances between pairs of points (pi,pj). In addition, the introduction of the rigidity matrix in [11] claims that:

Assume that the trajectory is smooth, then we could get the following expressions from (1):

where pi is the velocity at point pi. Then, we obtain the following homogeneous equation by combining (2) at different points:

where ṗ=column{ṗ1,ṗ2,…ṗ n } and R is called the rigidity matrix with dimension mx2n [m = n(n-1)/2] in the plane.
In addition, the rigidity function is described as follows for another definition of rigidity matrix:

where the ith component ‖pinek-poutek‖2 corresponds to the edge ek of E(k∈{1,2,…,m}E={e1,e2,…,em}).

where JĝG (p) is the Jacobian matrix of ĝG and JĝG(p) has the same form as the rigidity matrix R.

Lemma 2.1 tells us that some frameworks are rigid but not infinitesimally rigid. However, if the framework is infinitesimally rigid, then it is sure to be rigid. Fig. 1 illustrates these properties with two examples. It is easy to compute that rankJĝG(q)=2n−3 in Fig. 1 (a) and rankJĝG(q)<2n−3 in Fig. 1 (b), so Fig. 1 (a) is rigid and infinitesimally rigid; Fig. 1 (b) is rigid but not infinitesimally rigid as p is not a regular point. In general, the rigid graphs which fail to be infinitesimally rigid almost have parallel or collinear edges. In this paper, “rigid” almost always means “infinitesimally rigid”.

Two possible examples with a rigid framework
|E′| = 2|V| × 3.
For all E″ ⊆ E′,E″ ≠ ø
|E″|<<2|V(E″)|−3, where |V(E″)| is the number of vertices which are the end vertices of the edges in E″.
2.2 Persistent and minimally persistent graph
Rigidity is the property of the undirected graph, and persistence is the corresponding property of the directed graph.
From Lemma 2.3, we know that rigidity and constraint consistence are the crucial factors for the persistence of a directed graph. However, in the plane, the rigidity of a directed graph is actually the rigidity of the corresponding underlying undirected graph, and the constraint consistence means that every agent should satisfy all their own distance constraints.
As a result, the graph in Fig.2 (a) is persistent and the graph in Fig.2 (b) is not persistent as node 2 is not constraint consistent (one node is able to satisfy two distance constraints at most in the plane). The arrows in the figures indicate the “leading” relationship, instead of the direction of the information flow which is commonly used in graph persistent theory [14]. As a result, the arrows indicating node 4 in Fig.2 (a) mean that node 4 is the “leader” of node 1, 2 and 3; node 1, 2 and 3 can only know the information of node 4.

Example of a persistent and not persistent graph, (a) A graph is rigid and persistent; (b) A graph is rigid but not persistent
The minimal rigid graph requires that the graph has the least edges to satisfy the rigid conditions, and if one edge is removed, the graph will not be rigid. A comparative relationship between the rigidity and persistence is that the conditions of the minimally persistent graph are more complicated than that of the rigidity graph.
Lemma 2.3 and Lemma 2.4 tell us that the number of the vertices in a minimally persistent graph is always 2n−3 (n represents the number of nodes).
3. Formation control laws
An example of minimally persistent formation with three co-leaders is shown in Fig 3 in which agent 4, 5 and 6 are the leaders in a cycle and each of them has one Degree of Freedom (DF). The DF of any of the followers 1, 2 and 3 is zero. All the followers are directly or indirectly controlled by the leaders to fulfil the distance constraint, i.e., the motion of agent 1 is constrained by agents 4 and 6; while the motion of agent 2 is constrained by agent 4 and agent 1.
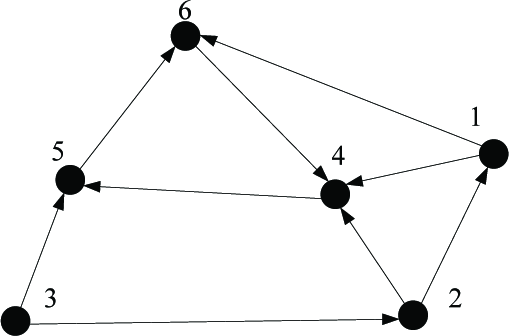
A graph with a minimally persistent formation with three co-leaders.
In this paper, the first order kinematic model is adopted for every agent:

3.1 Control laws for followers
For n agents, the index of all the followers is defined from 1 to n-3. When one agent pi has to maintain the constant distance (dij_0 and dik_0) from two leader neighbours (pj and pk), it has two choices (shown in Fig. 4). Agent pi may choose pi_0 or pi_0 as its targeted position since both of them have “the same distance (dij_0 and dik_0) to pj and pk. However, the position pi_0 is more feasible than p′i_o due to a short moving distance. Therefore, pi_0 is chosen as the target position to be reached for” the follower agent pi. All the followers in this paper are guided by such a principle.
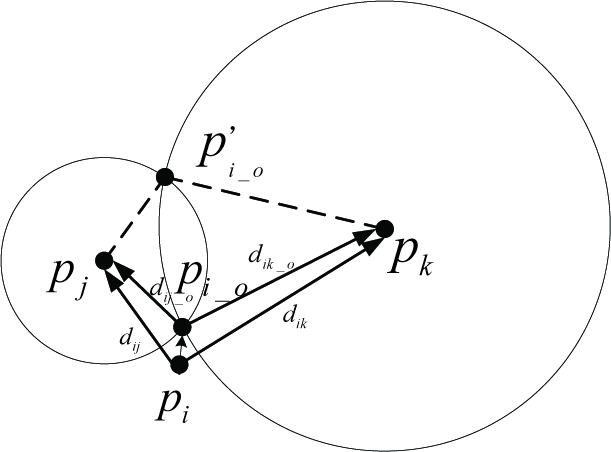
Moving principle of the followers.
From (8), we can design the control law:

where Ki is the gain here.
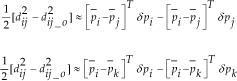
Suppose that the position of agent pi can be expressed as pi(t)=p̄ i +δpi(t), where p̄ i (p̄ i =(x̄ i ,ȳ i )) is the desired position which satisfies the dynamic constraint on the distance for the ith agent, and δpi (t) means a small variable. From Fig.4, by using the cosine law to the triangle pipjpi_0 and neglecting the non-linear second order terms, a linear equation can be obtained as follows:

where dij represents the distance between pi and pj, and dij_o means the distance between pi and pi_o.

Then,
As a result, the control law of the followers is represented by:
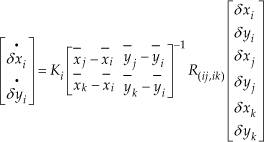

where R(ij,ik) is the sub-matrix of the rigidity matrix R. (Please see [17] for more details).
So, for all the followers, the control law can be obtained as follows:

where both K and Re are 2×2 diagonal block matrices. Re partly represents the rigidity of the formation.
3.2 Control laws for co-leaders
There are three co-leaders indexed by n-2, n-1, and n, and they lead each other. The minimally persistent formation controllers for three co-leaders are proposed as:

where kn, kn-1 and kn_2 are the gains.
Then

where
Re_n_2 is the sub-matrix of Re corresponding to node n-2. Refer to (10), the Re_n_2 becomes:

Each row of Re_n_2 is derived based on (10). As a result, the control law for pn_2 is:

Similarly, we get:

where

and

3.3 Control laws for the whole formation
Without loss of generality, any 2D linear motion can be equivalent to a two-step motion consisting of translation along the x-axis and y-axis. To simplify the analysis process, a two-step translation along the x-axis and y-axis are used to substitute the linear motion in this paper.
For the first step of the translation along the x-axis, the leader who firstly discovers the goal is defined as node n. In order to realize the x-axis translation, let the values of δyn,δxn,δyn−1 and δyn−2 all be zero, hence the values of ȳn−2 - ȳn−1, ȳ n −ȳn−1 and ȳn−2−ȳ n are also zero.
So we get that:

Likewise, for the second step of the translation along the y-axis, we arrive at the following conclusion:



Since the translation along the x-axis and y-axis is equivalent, we can only discuss the case of translation along the x-axis here.
With (11), (21), (22) and (23), we obtain a new control law:

where
The number of the rest control variable is only (2n−4) since δyn,δxn,δyn−1 and δyn−2 are all zero, so both Re and R are (2n−4)×(2n−4). As R is originally (2n−3)x2n (2n−4), (2n−2), (2n−1), 2n columns and the (2n−2) row will be removed from R to get R because they are corresponding to the zero value of δyn,δxn,δyn−1 and δyn−2. Based on the same reason, R⌢e is derived by removing (2n−4), (2n−2), (2n−1) and 2n columns fromRe.
Then the set of all the follower nodes is denoted by V and a subset of the follower node set is V′f,V′f ⊂ V′.


Here, we suppose that the two outgoing edges from node i are {pi, pj}and{pi, pk}, so:

4. Stability analysis
In section 3, we propose the formation control laws using the minimally persistent directed graph. In this section the stability of the control laws will be discussed.
The control laws will be expressed by:

Where

Theorem 4.1 For an n-node minimally persistent formation with the agent set P = {p1,p2,…,pn} at generic positions, the three co-leaders are indexed by n, n-1 and n-2. R is the matrix obtained by removing the (2n−4), (2n−2), (2n−1) and 2n columns, and (2n−2) row, from the rigidity matrix R. Then a diagonal block matrix K Re exists, such that the formation control laws (31) with the minimally persistent are stable.
Proof. In Theorem 3.2 in [17], we obtain the conclusion that if every leading principal minor of R̂ is nonzero, then a diagonal A exists such that the real parts of the eigenvalues of ΛR̂ are all negative.
Following Lemma 4.3 and Theorem 4.5 in [17], we know that both R(V') and R(V′f) are generally non-singular (V′f⊂V′) with one leader formation.
Finally, for all 1 ≤ k ≤ n-3, the outgoing edges from the vertex k are the main factor of R̂, so with the leading principal minor of R(Vf), there are three situations to be considered here.
The leading principal minor of R̂ is denoted by Di {i = 1,2,3 n−l}. On account of the sequence appearing in the leading principal minor, only the last appearing node needs to be considered here. Suppose that the last appearing node is pk, and its virtual leaders are pm,pn. The edges from pk are{pk,pm} and {pk,pn}.
If m < k and n < k, which means that the index of both pm and pn are smaller than that of pk in the sequence of the leading principal minor, then this leading principal minor is |R(V′f)|. As analysed in [17], it is known that R(V′f) is non-singular, so the determinant here is nonzero.
If (m<k<n) or (n<k<m). For the case of (m<k<n), when both of pm,pn. are the followers, and as R(Vf) is non-singular, so the determinant is nonzero; when pn is the co-leader, from Lemma 4.3 and Theorem 4.5 in [17], it is known that the determinant is also nonzero
If m > kandn > k, there are three situations that need to be discussed.
When both of them are followers, then it is similar to step (1); when one of them is the follower and the other is a co-leader, then it is similar to step (2); when both of them are co-leaders, then the leading principal minor is:

where X is a don't-care vector and x̄, ȳ are the x-axis and y-axis coordinates. So it is also nonzero.
To sum up, the leading principal minor of all the followers is nonzero. Then the leading principal minor of the co-leaders is provided as follows:

Both of them can be transformed into the form as follows:

where k̄ is the real coefficient gain and x indicates the real number, such as x̄n−1,x̄n−2 and x̄n. As a result, they are nonzero.
Therefore, the leading principal minor of
5. Simulations
In this section, simulations using the control laws designed in this paper are presented. Mobilesim software is used to conduct the simulation platforms.
In the simulations, the topology of the mobile robot system is the same as in Fig. 3, in which robots 4, 5 and 6 are defined as the leaders, and the others are the followers.
As analysed in section 3.3, to simplify the analysis, the simulations consist of two stages which are moving along the x-axis and then along the y-axis. In addition, two kinds of follower topology are studied, which are cyclic and acyclic.
In Fig.5 (a), the topology of the leader set {4,5,6} is cyclic and the topology of the follower set {1,2,3} is acyclic.

Simulation snapshots for a three co-leader minimally persistent formation with followers in an acyclic graph.
In the simulations, the gains applied in the controller are defined as follows:

where

Node {1,2,3}⊂V′, and their topology is acyclic, so based on Theorem 5.2 in [17], we know that all the eigenvalues corresponding to node {1,2,3} are −1. So only the eigenvalues corresponding to the leader needed to be adjusted by k̂.

Snapshot (a) and (b) in Fig. 5 show that the formation is moving with the following initial position:

Considering the property of
Then, another situation is considered where the topology of the follower set {1,2,3} is cyclic. The snapshots are shown in Fig 6.

Simulation snapshots for a three co-leader minimally persistent formation with followers in a cyclic graph.
The initial positions of the robots are defined as follows:

Both the leaders and followers are in a cycle, hence it is more complex than the first situation.
From [17], we know that: if the topology of V′f={1,…,k}⊂V′ is cyclic, define a to be the trace of the cycle weight. Then k eigenvalues of S(V′) are at −1, and the remaining are at

For this designed persistent formation (k=3), the eigenvalues for S(V') are:

K̂ is chosen as follows:
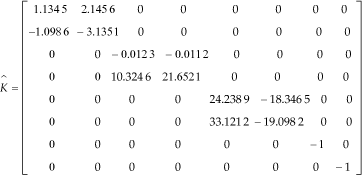
The eigenvalues of

So it can be proved that this situation is also stable.
6. Conclusions
This paper mainly dealt with the problem of minimally persistent formation control with three co-leaders, and the minimally persistent formation control law for the case where three co-leaders are in the cycle was proposed. The non-square matrix, which mostly represents the characteristic of the persistent formation, is successfully utilized to design the control law. In the process of designing the control laws, the straight line motion is substituted by a two-step translation motion along the x-axis and y-axis, respectively. The method of leading principal minor is adopted to prove that the system with the designed law can be stabilized. The simulation results demonstrate that whether or not the followers lie on a cyclic graph, the designed control law is effective.
Footnotes
7. Acknowledgments
The authors would like to thank the Editor-in-Chief, the Associate Editor, and anonymous reviewers for their constructive suggestions to improve the quality of this paper. This work was supported by the Projects of Major International (Regional) Joint Research Program NSFC (61120106010), National Science Fund for Distinguished Young Scholars No. (60925011), NSFC (61175112), and Beijing bionic robot and system the key laboratory.