
Abstract
The mechanism with good fold performance derived from rigid origami is widely used in the field of engineering. In this article, the adjacency matrix method was proposed to analyze the degree of freedom of foldable plate rigid origami. This method can also judge the number of redundant constraints while calculating the degree of freedom of the rigid origami. First, the adjacency matrix between vertices of origami structure was established. Then the elimination matrix was introduced, and the process of determining the motion state of vertices was described by matrix product. The degree of freedom of rigid origami was determined by calculating the number of constraints introduced. A method for judging redundant constraints of rigid origami was proposed, and the number of redundant constraints was determined by computing the sum of the row elements corresponding to the vertices. The motion state of the cross-crease vertex was analyzed, and the computational error of the degree of freedom at the cross-crease vertex was avoided by the method of classification and simplification. The degree of freedom of the ring pattern was discussed, and the calculation method of the degree of freedom of whole pattern with many ring patterns was summarized. Finally, the degree of freedom of typical rigid origami was analyzed.
Keywords
Introduction
The panels of rigid origami keep the rigidity in addition to creases, during the folding process. Many foldable mechanisms have been derived from rigid origami, which have the advantages of artful structure and is easy to fold. They have attracted wide attention and application in the field of practical engineering. In civilian areas, the mechanism derived from rigid origami can be used in the design of foldable dinnerware, 1 kayak, 2 shelter, 3 and so on.4–6 In the field of aerospace, the mechanism derived from rigid origami can be used in the design of the solar array.7–9 In order to explore the principles of origami and develop more structures from rigid origami, more and more scholars are using mathematics to explain origami.
In the study of kinematics of origami, Kawasaki 10 put forward the requirement of the angle between the creases when a single vertex can fold flat, thus becoming the basic theorems for flat-foldable origami with Maekawa’s 11 mountain-valley crease theory. Belcastro and Hull 12 modeled the paper using a matrix method, and discussed the necessary conditions of the rigid origami. Hull 13 studied the influence of the mountain-valley assignment on flat foldability, discussed the sharp bounds of the distributions of the mountain-valley assignment in a flat vertex fold, and explored the analysis method of flat multiple vertex folds. Tachi 14 built a fold simulation system for rigid origami models, and realized the fold simulation of some origami configurations, by triangulating the polygons and adjusting the crease lines. Wu and You 15 established the motion model of origami by quaternions and dual quaternions, analyzed the flat foldability and rigid foldability of the initially flat or a non-flat pattern with a single vertex or multiple vertices, and judged the self-intersection of the origami in the folding process. Chen and Feng 16 used a nonlinear algorithm to predict the folding behavior of the origami structure and present a numerical analysis and finite element simulation of the folding process. Abel et al. 11 proposed a necessary and sufficient condition for the rigid foldability of a single vertex, and laid the basic theory for the study of rigid origami. Chen et al. 17 established a general kinematic model for rigid origami, obtained a series of deployable prismatic structures, and proposed a design method for single degree of freedom (DOF) multilayered prismatic structures. Cai et al. 18 improved the quaternions method, verified the foldability of cylindrical origami configurations, and analyzed the motion of leaf pattern, 19 Kresling pattern,20,21 and cylinders with Miura-ori. 22
Several methods23–25 have been proposed for the calculation of the DOF of the classical mechanism; however not many approaches are applicable to the DOF calculation of the rigid origami. In the study of DOF of the rigid origami, the empirical formula for calculating the DOF of rigid origami has been summarized. 14 Cai et al. 26 established the system constraint equations using different constraints, and calculated the DOF of the rigid origami from the dimension of null space of the Jacobian matrix. However, the empirical formula of the DOF has some limitations. When the redundant constraints of the origami structure exist, the empirical formula of the DOF will not be applicable. The method proposed by Cai using the dimension of null space of the Jacobian matrix is complicated. When the origami pattern is sophisticated, the derivation of the null space of the Jacobian matrix can be too complex.
This article originally put forward a method to analyze the DOF of rigid origami by transforming the adjacency matrix. The adjacency matrix between vertices of origami is established and the required constraint of origami is determined by the transformation process of adjacency matrix. The DOF of rigid origami was determined by calculating the number of constraints introduced. It is superior to the empirical formula method that this method has applicability to the origami pattern with redundant constraints and can determine the number of redundant constraints and the location of redundant constraints in the analysis process. Compared with the method proposed by Cai, the calculation process of this method is simple and easy to be realized by computer programming.
In this article, the relation between the DOF and the number of edges of a single vertex is analyzed by screw theory, and then the adjacency matrix method is proposed to analyze the DOF of rigid origami with multi-vertices. The establishment of adjacency matrix, elimination transformation of matrix, calculation of DOF, and the judgment method of redundant constraint are introduced. Then two special cases are discussed. Finally, some examples are given to verify the correctness of the adjacency matrix method for analyzing the DOF of rigid origami with multi-vertices.
DOF of a single vertex
In kinematic analysis of rigid origami, the creases can be equivalent to revolute pairs, and the paper can be equivalent to the bar (as shown in Figure 1). In the analysis of the DOF of a single vertex, the motion screw system of the vertex is established using the screw theory,27–30 and then the DOF of the single vertex is calculated by the modified G-K formula. In screw theory, the position of the coordinate system has no influence on the relevant and reciprocal relationship between the screws, so that the origin of the coordinate system can be chosen as the point at which the motion analysis is convenient. The vertex is chosen as the origin of the coordinate system. The direction of the crease 1 is the direction of the

A single vertex equivalent to mechanism: (a) a vertex with m creases (m≧ 4) and (b) the equivalent mechanism of the vertex.
By analyzing the position of each rotating pair axis in the coordinate system

The fourth to sixth elements in each screw are 0, indicating that there are at least three reciprocal screws for the kinematic screw system. Since a number of revolute pairs intersect at one point, there is a three-dimensional rotation in space, and the rank of the constraint screw system cannot be greater than 3. Based on the above analysis, we find that the constraint screw system of a single vertex is

where
Irrespective of the number of creases, a single vertex rigid origami always has a common binding force of three directions in space, so the rank of the equivalent mechanism

where
For the vertex not at the boundary, there is still a connection between the rotation pair

For the boundary vertex, there is no face between

DOF of the pattern with multi-vertices
In the previous section, the relation between the DOF of a vertex and the number of edges at the vertex is analyzed. It is easy to establish a kinematic screw system, as the relation between the positions of the creases in a single vertex is relatively simple. For multi-vertices, it is troublesome to analyze the DOF by establishing a kinematic screw system. The adjacency matrix method which is a simple method for calculating the DOF of rigid origami with multi-vertices is proposed here.
From the analysis of the previous section, it is shown that the DOF of the non-boundary vertex is equal to

The simple model of the deployable antenna.
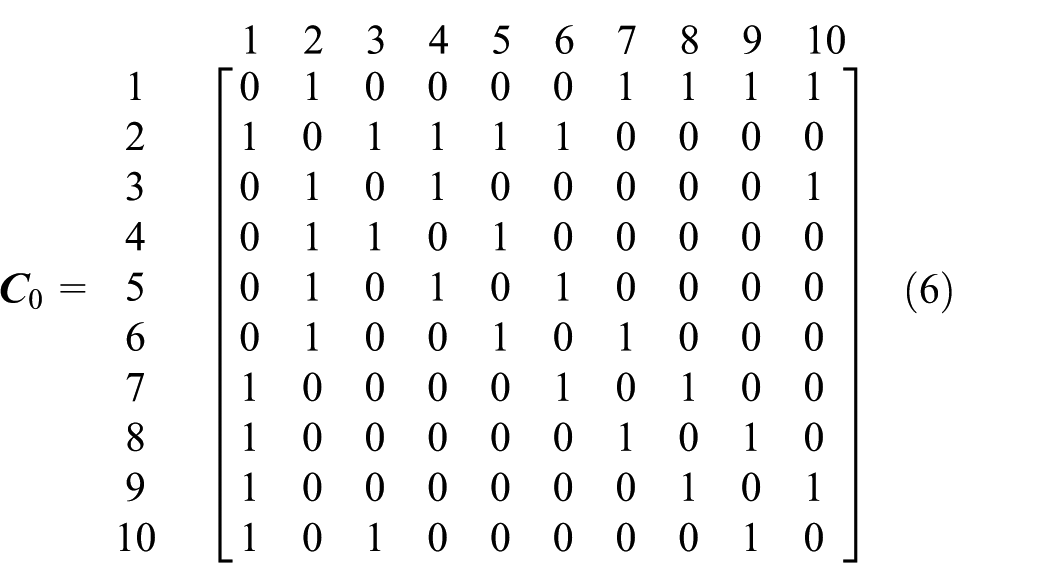
For patterns with many vertices, the above process of calculability will become tedious. Then this article proposed an adjacency matrix method to calculate the DOF of origami with multi-vertices. In the initial adjacency matrix
The number of “1s” in a row or column in the adjacency matrix
The variable

In the matrix

The elimination matrix is the diagonal matrix of

The equation of

After the motion of vertex 1 is determined, the vertex 2 is then analyzed. There are 4 “1s” in the second row of the matrix

After adding constraints to vertex 2, the matrix

After the motion of the vertex 2 is determined, the motion of the non-boundary vertices is completely determined, then the motion of the boundary vertices is analyzed below. As shown in matrix

The analysis process of the DOF of multi-vertices can be summarized as Figure 3. In the analysis of DOF, the “1” in the matrix

where
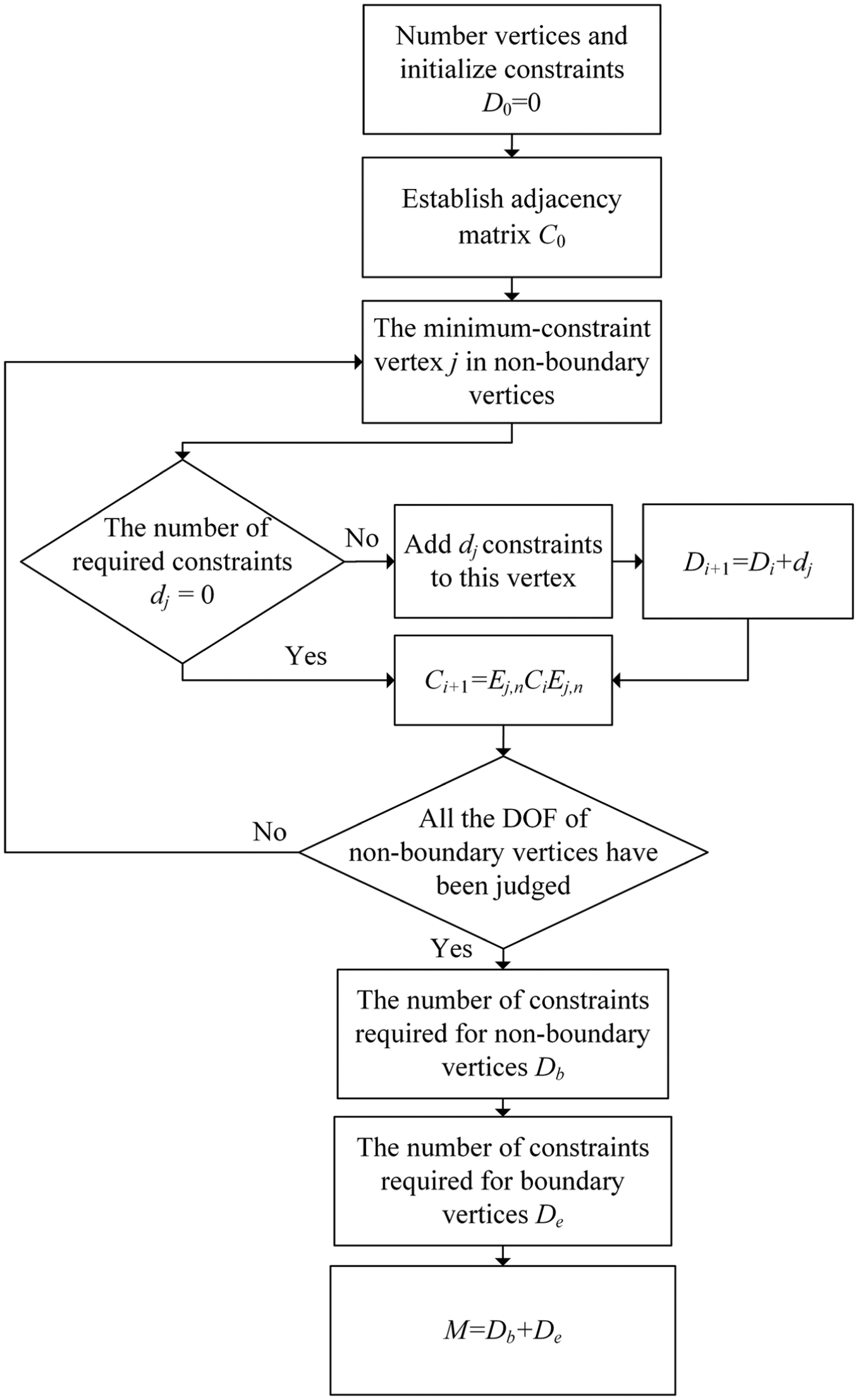
The analysis process of the DOF of multi-vertices.
The DOF of the pattern with multi-vertices,
Redundant constraint judgment
The adjacency matrix method can determine the number of redundant constraints and the location of redundant constraints in the analysis process. Judging the redundant constraints by adjacency matrix method is introduced by taking Miura-ori pattern as an example. The empirical formula for calculating the DOF of rigid origami is

where
The Miura-ori pattern shown in Figure 4 has 12 vertices and 31 edges except the boundary and boundary vertices. According to the empirical formula, the DOF of the pattern shown in Figure 4 is

Miura-ori.
Take the vertex with six creases in Figure 5 as an example to explain redundant constraints. Equation (4) shows that the DOF of the non-boundary vertex is equal to the number of edges minus 3, and that the DOF of this vertex is 3. When the rotation angles of the six creases are all uncertain, three constraints are required to completely determine the motion of the vertex. When the rotation angles of the creases

The vertex with six creases.
The analysis of redundant constraint of the Miura-ori shown in Figure 4 is now carried out. The adjacency matrix of the Miura-ori is

According to the analysis procedure shown in Figure 3, the minimum-constraint vertex is determined and the elimination transformation is performed. There are a variety of elimination paths in this pattern, and the position of redundant constraints is different in different elimination paths, but the total number of redundant constraints is the same. Only one elimination path is listed here,

The sixth row
The eighth row
The 10th row
The 11th row
The 12th row
The sum of the elements in each rows is 2. That is, there is one redundant constraint at each vertex 6, 7, 8, 10, 11, and 12. The total number of redundant constraints is six. According to the empirical formula, the DOF of this pattern is
Exceptional case
Cross-crease vertex
The distribution of the four creases in the cross-crease vertex
34
is shown in Figure 6(a). The two opposite creases are collinear, that is, the angles between the creases satisfy the condition

The cross-crease vertex and its fold states: (a) the cross-crease vertex, (b) one fold state, and (c) the other fold state.
For cross-crease vertex, when the rotation angle of a crease is not 0, it can be determined that the rotation angle of the adjacent crease is 0, but when the rotation angle of the crease is 0, the rotation angle of the adjacent crease cannot be determined. According to the kinematic characteristics of the cross creases, the origami pattern shown in Figure 7(a) has two motion states, as shown in Figure 7(b) and (c). As shown in Figure 7(b), the intersection of creases 1, 2, 3, and 4 is cross-crease vertex. The rotation angle of crease 1 is non-zero angle

Origami pattern with many cross-crease vertices and its fold states: (a) origami pattern with many cross-crease vertices, (b) one fold state, and (c) the other fold state.
The above properties of cross-crease vertex result in possible errors when judging DOF using the adjacency matrix method. In order to avoid errors, the creases can be classified and simplified. According to the kinematic properties of cross-crease vertex, the vertex has only two motion states, and only one state can be represented at one time. When one crease of a cross-crease vertex has a non-zero rotation angle, the rotation angle of its adjacent crease must be zero. When the rotation angle of one crease is zero, the rotation angle of its opposite crease must be zero. If we classify and simplify the creases of cross-crease vertices, the corresponding creases can be ignored according to the motion trend at the vertex. The pattern shown in Figure 7(a) can be classified and simplified as pattern shown in Figure 8(a) and (b). If the crease 1 in Figure 7(a) has non-zero rotation angle, then the pattern in Figure 7(a) is equivalent to the pattern in Figure 8(a). If the crease 4 in Figure 7(a) has non-zero rotation angle, then the pattern in Figure 7(a) is equivalent to the pattern in Figure 8(b). The adjacency matrix is established by the simplified pattern shown in Figure 8, to analyze the DOF of multi-vertices, then the misjudgment caused by cross-crease vertex can be avoided.

Simplified pattern: (a) the transverse creases are ignored and (b) the longitudinal creases are ignored.
Ring pattern
As for the ring pattern shown in Figure 9(a), all the vertices of the inner ring and the outer ring are the boundary vertices, and there is error when calculating the DOF by directly using the adjacency matrix method. The four creases of the pattern will intersect at the same point (as shown in Figure 9(b)). The patterns shown in Figure 9(a) and (b) have the same motion characteristics due to the same direction and position of the creases. The folding states of the two patterns are shown in Figure 10. For the ring pattern with creases intersecting at the same point, the creases can be extended, then the pattern is equivalent to a pattern with single vertex pattern. The DOF of this pattern can be obtained by analyzing the DOF of the equivalent pattern using the adjacency matrix method. The DOF of the pattern shown in Figure 9(a) is 1.

Ring pattern with four creases and the pattern with single vertex: (a) ring pattern with four creases and (b) the pattern with single vertex.

Folding states of the ring pattern and pattern with single vertex: (a) folding state of the ring pattern and (b) folding state of the pattern with single vertex.
As shown in Figure 11(a), the creases of some ring patterns do not intersect at the same point. In this case, the ring pattern cannot be simply equivalent to the pattern with a single vertex. The DOF can be calculated from the dimension of the null space of the Jacobian matrix. 26 The DOF of this pattern is 1, and the calculation process is shown in Appendix 1.

Ring pattern with six creases and its folding state: (a) ring pattern with six creases and (b) folding state of the ring pattern.
For the pattern consisting of multiple ring patterns (shown in Figure 12(a)), calculating the dimension of the null space of the Jacobian matrix is complex. The method combining the null space of the Jacobian matrix and the adjacency matrix can be used.

The whole pattern with multiple ring patterns and its folding state: (a) the whole pattern and (b) folding state of the whole pattern.
The pattern shown in Figure 12(a) is composed of four patterns shown in Figure 11(a). To analyze the DOF of this pattern, simplify the pattern shown in Figure 11(a) first, and then the whole configuration can be simplified. The pattern shown in Figure 11(a) can be replaced by an imaginary simplified pattern with single vertex shown in Figure 13(a). The number of creases which intersect at the same point in the simplified pattern is the same as that in the ring pattern. The simplified pattern is only an ideal pattern without real existence, only for the convenience of calculating the DOF of the pattern shown in Figure 12(a). The DOF of the simplified pattern is different from that of the ordinary single vertex with six creases, but the same as that of the pattern shown in Figure 11(a), and both of which are 1. The method to calculate the DOF of the simplified pattern becomes


The simplified pattern: (a) the simplified pattern of ring pattern with six creases and (b) the simplified pattern of the whole pattern.
It is shown that the number of constraints required to determine the motion of vertex 1 is equal to the number of “1s” in the row element corresponding to the vertex 1 in the adjacency matrix minus 5. For example, the first row element corresponding to the vertex 1 of the initial adjacency matrix of the pattern shown in Figure 13(a) is
The ring patterns shown in Figure 12(a) are all simplified as the pattern shown in Figure 13(a), and the whole pattern after simplification is shown in Figure 13(b). In Figure 13(b), vertices 1, 2, 5, and 6 are imaginary intersections, whose DOFs are calculated in accordance with equation (18). Vertices 3 and 4 are the non-boundary vertices, whose DOFs are calculated according to equation (4). The rest of the vertices are the original boundary vertices, whose DOFs are calculated in accordance with equation (5).
The calculation of the DOF of the pattern shown in Figure 13(b) is as follows, and the initial adjacency matrix is established as
According to the adjacency matrix method to judge DOF, first, the minimum-constraint vertex in the non-boundary vertices are determined. According to equation (18), the number of required constraints of vertices 1, 2, 5, and 6 are all 1. On the basis of equation (4), the number of required constraints of vertices 3 and 4 is 3. Then any vertices among 1, 2, 5, and 6 can be chosen as the minimum-constraint vertex, when doing the first elimination transformation. According to the principle of selecting the minimum-constraint to eliminate, the elimination path

There are 5 “1s” in this row. According to equation (18), the number of required constraints is 0, that is, there is no need to provide constraints, and the elimination transformation can be carried out.
The fifth row

Like vertex 6, there is no need for constraints at this vertex. When the motion of the non-boundary vertices is determined, the constraints required by the boundary vertices are calculated according to equation (14). The number of constraints required for the boundary vertices of this pattern is 0. After three constraints are added, the motion of the whole pattern is determined, that is DOF of this pattern is 3.
For other origami patterns like the pattern shown in Figure 12(a), which consists of a number of ring patterns, the DOF can be determined according to the above method. First, the number of constraints required for a single ring pattern is determined. For the ring pattern with creases that intersect at one point, after extending the creases, the pattern is considered as a pattern with single vertex. When the creases do not intersect at the same point, use the method of the Jacobian matrix 26 to calculate DOF. Then each ring pattern can be simplified to an imaginary pattern with single vertex. The number of creases in the simplified single vertex pattern is the same as that in the ring pattern, ignoring boundaries. Finally, the DOF of the whole pattern can be judged by the adjacency matrix method. Note that the method to calculate the number of constraints required for virtual vertices is different from that of general vertices.
Example analysis
Waterbomb
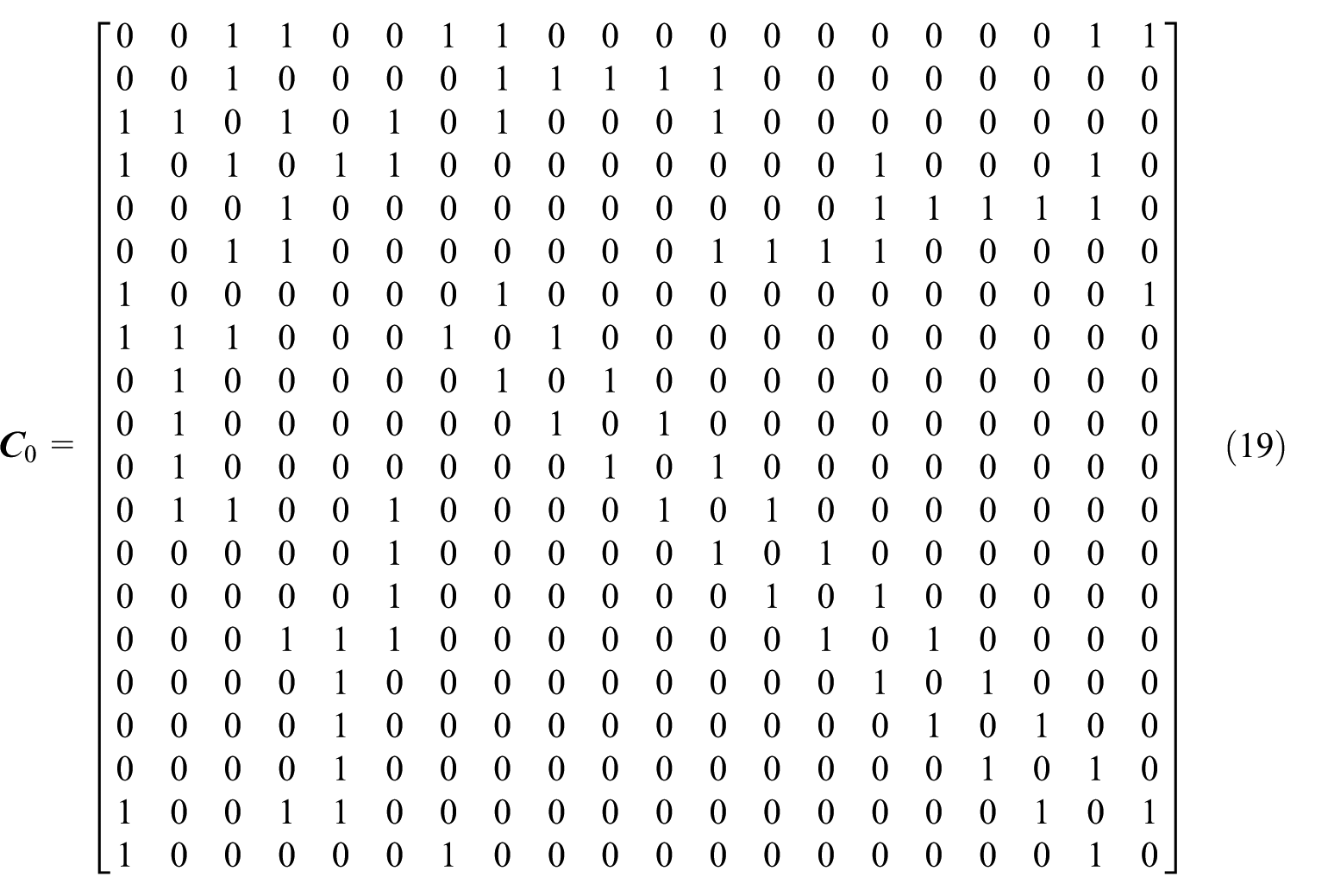
The DOF of the waterbomb35,36 shown in Figure 14 is analyzed by the adjacency matrix method. First, the adjacency matrix is established as follows


Waterbomb.
In the analysis of the DOF of the waterbomb pattern, the minimum-constraint vertex is chosen to do the elimination transformation, and there are also several elimination paths. Here, the path

The 21st row

The 29th row

The 31st row

According to equation (14), the constraint number of the boundary vertex is

Then the DOF of the waterbomb pattern shown in Figure 14 is

Symmetric triangular pattern
When the DOF of the symmetrical triangular pattern shown in Figure 15(a) is analyzed, it is judged that the vertex 4 is a cross-crease vertex. The pattern can be simplified when there are cross-crease vertices. According to the folding process shown in Figure 15, the crease

The symmetric triangular pattern: (a) the symmetric triangular pattern, (b) the simple pattern, (c) partially folded position, (d) creases overlap, (e) mostly fold position, and (f) final fold position.
There are only two creases in vertex 4 in the simplified pattern. The sum of the elements in the fourth row which corresponds to the vertex 4 in the originally established adjacency matrix

The path

The DOF of the pattern shown in Figure 15(a) at the initial stage is 3. In the folding process, the rotation angles of creases
Recursive corner gadget
The recursive corner gadget shown in Figure 16(a) is proposed by Lang et al.
37
The pattern shown in Figure 16(a) has nine vertices and 20 edges except the boundary and boundary vertices. According to the empirical formula, the DOF of the pattern shown in Figure 16(a) is


Recursive corner gadget: (a) the recursive corner gadget pattern and (b) partially folded position.
The path
In the matrix
In the matrix
In the matrix
In the matrix
Through the above analysis, it is found that there are eight redundant constraints in the recursive corner gadget pattern shown in Figure 16, and the DOF of this pattern is 1.
Conclusion and discussion
This article presents an adjacency matrix method for analyzing the DOF of foldable plate structures based on rigid origami with multi-vertices. The method is simple, convenient for computer programming, and can determine the number of redundant constraints in origami patterns. The relation between the vertices is expressed by adjacency matrix, which is convenient for computer identification and matrix transformation. By introducing the elimination matrix, the process of determining the motion state of vertices is described by matrix product, and the complex interaction between vertices in origami pattern is simplified by means of matrix transformation. By judging the sum of the elements of the corresponding row in the adjacency matrix, the number of required constraints and redundant constraints of the vertex is determined. The computational error of the DOF caused by the particularity of the motion of cross-crease vertex is avoided by using the method of classification and simplification. The method to calculate the DOF of ring patterns has been discussed, and an imaginary intersection has been introduced. The method of combining the Jacobian matrix method and the adjacency matrix simplifies the analysis process of the DOF of the overall pattern with multiple ring patterns. The correctness of the adjacent matrix method is verified by the analysis of the DOF of typical origami patterns.
The adjacency matrix method is simple, compared to the screw method and the null space of Jacobian matrix method, and can judge the redundant constraints, but also has some shortcomings. When creases overlap during folding process (shown in Figure 15(d) and (e)), then the motion characteristics of rigid origami are changed, and the DOF cannot be judged by the adjacency matrix method alone. It is necessary to analyze the DOF of the pattern by combining the metamorphic theory with the adjacency matrix method.
Footnotes
Appendix 1
The procedure of the method of the null space of the Jacobian matrix can be summarized as follows:
Using the Jacobian matrix to calculate the DOF, there may exist some kinematic bifurcation points which increase the number of calculated DOF, when all vertices are coplanar. Therefore, the condition that all the vertex coplanar is not selected as the initial position, and the initial position coordinates of each vertex of the ring pattern are shown in Table 1.
Establish the system constraints, which include 18 rigid length constraints (equation 26), 6 rigid length constraints of diagonal lines (equation 27), 6 coplanar constraints (equation 28), and 6 boundary constraints (equation 29), as follows
where
According to the above constraints, the constraint equations are listed as follows
The derivative of equations (30)–(33) with respect to time leads to the Jacobian matrix, given by
The dimension of the null space of
Handling Editor: Jan Torgersen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.