
Abstract
In this paper, an adaptive controller is designed for a UAV flight control system against faults and parametric uncertainties based on quantum information technology and the Popov hyperstability theory. First, considering the bounded control input, the state feedback controller is designed to make the system stable. The model of adaptive control is introduced to eliminate the impact by the uncertainties of system parameters via quantum information technology. Then, according to the model reference adaptive principle, an adaptive control law based on the Popov hyperstability theory is designed. This law enable better robustness of the flight control system and tracking control performances. The closed-loop system's stability is guaranteed by the Popov hyperstability theory. The simulation results demonstrate that a better dynamic performance of the UAV flight control system with faults and parametric uncertainties can be maintained with the proposed method.
Keywords
1. Introduction
A UAV is a nonlinear, strong coupling, time-varying complex system with lots of uncertainties. As the flight parameters change in the rapidity [1], the stability and reliability cannot be realized by conventional control systems when faults occur [2]. The actuator faults of the UAVs may lead to catastrophic events. In order to maintain the specified performance of the UAV, a fault tolerant control approach has been proposed.
When designing a control system, the control input is usually thought of as having no constraint [3–6]. However, for a flight control system, the control system input is bounded. Therefore, in the design of a control system, the closed-loop system performance is influenced by bounded control input. Generally speaking, the design and analysis of the bounded control input system can be divided into two sections [7–11]. This paper's research direction is closed-loop asymptotic stability of a bounded control input control system. The target is to design a control system to ensure the global asymptotic stability.
In recent years, lots of control methods have been researched in the application of flight control systems, such as the correction factor of fuzzy mathematics [12] and the optimal corrective function of a fuzzy controller without quantifications [13]. The common characteristic of these methods is to use the Lyapunov stability theory to design an adaptive law of the adaptive institutions. The global stability is guaranteed by the theory. However, the proper Lyapunov function is constructed with difficultly using the Lyapunov stability theory. Adaptive control laws can be obtained by the model reference adaptive system, which are designed using the Popov hyperstability theory [14–15]; at the same time, it can be designed systematically.
In order to achieve tracking flight control [16–20], an adaptive controller is designed for a UAV flight control system based on the Popov hyperstability theory. First, considering the bounded control input, the state feedback controller is designed to make the system stable. Then, the model of adaptive control is designed to eliminate the impact of the uncertainties of the system parameters. When the error is approaching to zero, the parameters of the adjusted model are close to the actual parameters. The signal is identified. Then, according to the principle of model reference adaptive control, an adaptive control law is designed based on the Popov hyperstability theory. Better robustness of the flight control system's is attained using this law and tracking control performances are simultaneously improved. The closed-loop system stability is guaranteed by the Popov hyperstability theory.
Furthermore, quantum information technology is used to develop the adaptive control law, which can increase the UAV's self-repairing control accuracy in the case of a fault [21–22].
The simulation results demonstrate that a better dynamic tracking performance of a UAV can be realized by the proposed method.
2. Problem Statement for UAVs
In this section, a linear time-invariant multivariable UAV plant is considered.


The reference model can be expressed as:


where xp(t), xm(t) ∈ Rn, are state vectors; yp(t), ym(t) ∈ Rm are output vectors; u(t) ∈ Rr are control input vectors. Ap,A ∈ Rn×n, Bp,Bm ∈ Rn×r, and Cp,Cm ∈ Rn×r are system state matrices, input matrices and output matrices, respectively.
Assumptions:
The pairs (Ap,Bp) and (Ap,Cp) given in plant (1) are completely controllable and observable, respectively.
Am is a Hurwitz matrix, that is to say, the reference model is asymptotically stable.
2.1 Quantum Information Technology
In quantum computation, |0〉 and |1〉 denote the two basic states of micro-particles 0 which are termed quantum bits (qubits). An arbitrary single-qubit state can be expressed as the linear combination of two basic states. The state of a qubit is not only |0〉 and |1〉, but is also a linear combination of the state, which is usually termed a superposition state, namely,

where, α and β are a pair of complex, termed probability amplitude of quantum state, namely, as the measurement result in quantum state |φ〉 collapsing |0〉 with a probability of |α|2 or collapsing |1〉 with a probability of |β|2, and satisfying

Therefore, quantum state can be also denoted by the probability amplitude of quantum state in the form of |φ〉=[α,β] T . Obviously, when α=1, β=0 in (5), |φ〉 is the basic state |0〉, which can be described by φ〉 = [1,0] T . Otherwise, when α=0, β=1 in (5), |φ〉 is the basic state |1〉, which can be described by |φ〉=[0,1] T . Generally speaking, the quantum state is the unit vector of two-dimensional complex vector space.
Due to the collapse of quantum states caused by observation, the quantum bits can be seen as a continuous state between |0〉 and |1〉, until it has been observed. The existence of a continuous state qubit and behaviour has been confirmed by a large number of experiments, and there are many different physical systems that can be used to realize quantum bits. Where, α equals no faults and β equals faults.
2.2 Actuator Faults Model
The actuator is one of the most important components in an aircraft system. Various types of actuator faults have been performed, including actuator effectiveness, decrease due to control surface impairments, floating faults, saturation faults, etc. [23–28]. To formulate the fault-tolerant tracking control problem, the loss-of-effectiveness fault is established for this research. Faults that are developed in a linear system can be represented by an equation


where

In Fig. 1, f is the actuator fault.
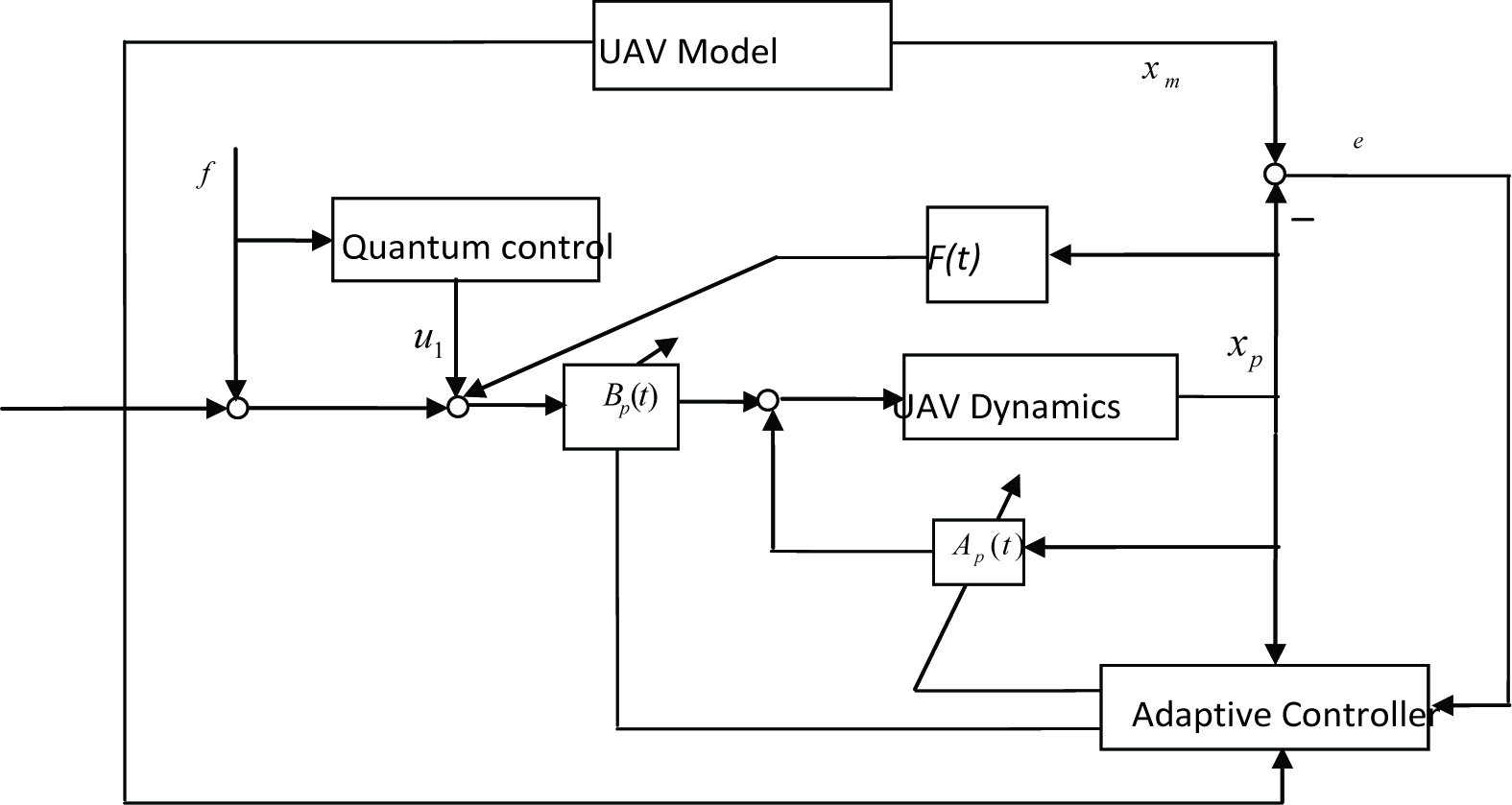
Adaptive control based on Popov hyperstability theory and quantum information technology
2.3 Objective of Fault-tolerant Tracking Control
Consider the system described by (7) with actuator faults. The error of the state variables between the plant and model is defined as:

The control objective: for the controlled plant with faults and parameter uncertainties, an adaptive control law is designed to track the reference model for any u.
3. Bounded Control Input
According to the appropriate methods, a state feedback controller is designed as:


Ac ∈ Rn×n is the state matrix and F ∈ Rn×n is the state feedback matrix. Because the control input is bounded, the controller equation is expressed as:


sat(F(t)x(t)) is a saturated nonlinear function. umax is the limited amplitude of control input. The function
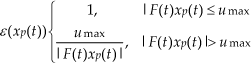
The conclusion can be obtained that

The closed-loop equation can be expressed as:




as given real symmetric, uniform bounded and consistent negative definite matrix [3].
By adjusting the output of the state feedback controller, the control objective is ensured that the input does not exceed the given amplitude. The operation of the normal control system is satisfied. Then, according to the model reference adaptive principle, an adaptive control law is designed.
4. Quantum Control Module
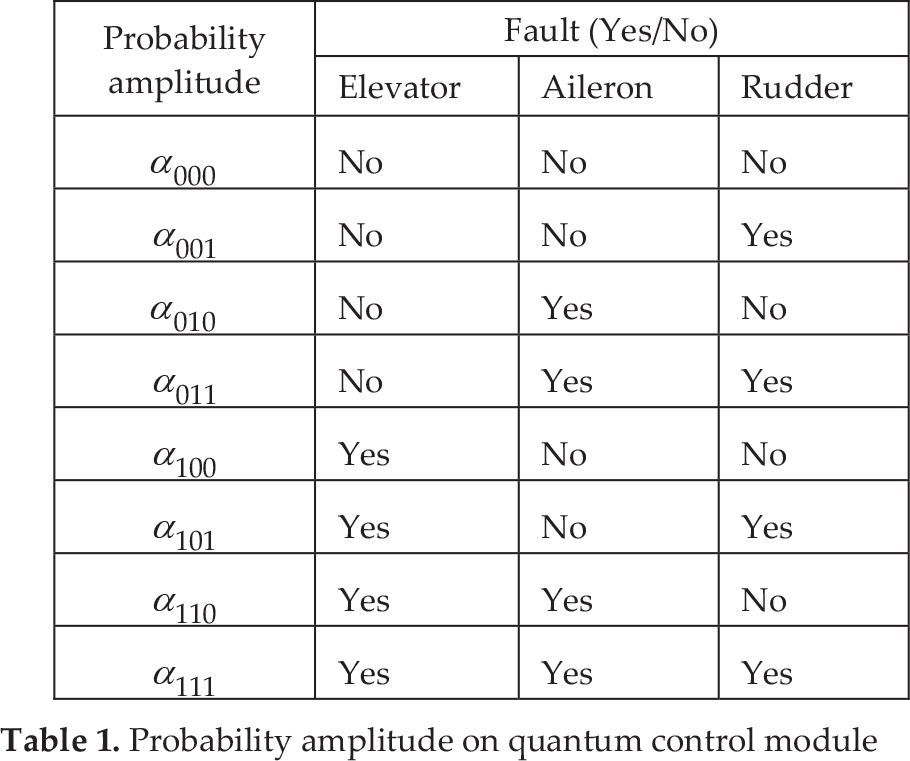
UAV flight control systems can be divided into longitudinal channel control and lateral channel control. The control surfaces are elevator, aileron and rudder, respectively. In a normal case, due to the strong coupling between the longitudinal and lateral channels, the control law design becomes very complex, so the longitudinal and lateral channel control must achieve decoupling. Then the longitudinal and lateral control can be designed for UAV flight control systems, respectively. In this study, the integrated control law is designed for a UAV flight control system's longitudinal and lateral channel using the quantum bits state of the quantum-control technique. The quantum control module in Fig. 1 shows the three quantum bits' state description and control, and the specific description of three quantum bits' probability amplitude for the UAV quantum control module can be seen in Table 1.
Probability amplitude on quantum control module
5. Adaptive Control Law
5.1 Equivalent Nonlinear Time-varying System
According to (1) and (3), we can get

From hyperstability theory, the equivalent feedback square must satisfy Popov integral inequality. The equivalent forward square must be strictly positive real. Therefore, a linear compensator D is designed.

In equation (1), Ap(v,t) and Bp(v,t) are system parameters. Adaptive law is a nonlinear time-varying function of v. In order to make e(t) = 0, an integral component should be considered in the adaptive law. Therefore, the adaptive laws are designed as:


where, Φ1, Φ2 and, ψ1, ψ2 are the matrices of the corresponding dimension. Put equations (23) and (24) into the (21), the equations can be expressed as:

5.2 The Popov Integral Inequality
The equivalent feedback square needs to satisfy Popov integral inequality

In equation (26), r02 > 0. Then putting (25) into (26), the equation can be expressed as:

Therefore, the following formulae can be established.


Because the forms of (28) and (29) are the same, equation (28) needs to be guaranteed.




Fa(t),F′a(t − τ), Fb(t) and F′b(t) are the system of the impulse response function.
Proof: In order to solve Φ1(v,t,τ) and Φ2(v,t), (28) is broken into two inequalities.


The matrices Φ1(v,t,τ) and Ap0 − Am are decomposed into column vectors.


In the equation


Equation (40) should be considered.

In formula (34), ηφ1(0,t1) can be expressed as:

ηφ1i(0,t1) can be expressed as:

If ηφ1i(0,t1) all satisfy the same type of inequality (43), (41) will satisfy the Popov integral inequality.

In order to prove the inequality [29], φ
i
(v,t,τ) is obtained as:

Therefore, the equation

can make (34) and (35) established. Therefore, the closed-loop system stability is guaranteed by the Popov hyperstability theory
5.3 Linear Feedback Compensator
The transfer function matrix of the equivalent forward square

must be strictly positive real. In formula (46), D could be obtained by lemma 3.
Lemma 3


If matrix Q, P is guaranteed as a positive definite matrix, matrix D could make G(s) a strictly positive real matrix. Therefore, the adaptive system could be guaranteed as global asymptotic stability.
6. Simulation Analysis
The method described in this paper will now be demonstrated by a UAV model. This system is written in the form of (1), where x = [p r β] T is the state vector, its variables are rolling angle rate, yaw angle rate and sideslip angle. u = [δa δf δr] T is control vector.

where a ∈ (−1.301475,−0.1859) and b ∈ (−0.378,−0.054).
The simulation time is set as 20 seconds. The initial input p, r and β can be chosen as 0.17, 0.5, 0.13. The fault has been put as a sine wave, where the amplitude is 0.3 and the frequency is 3.14. The fault has been put into the system at 10 seconds.
The control performance of the error of roll angle rate and yaw angle rate is depicted in Figure 2 and Figure 3. Curve 1 represents the system output with the fault. Curve 2 represents the output of the system with no fault. The effectiveness of the proposed method is shown by comparing the curves. After the fault has been put into the system, the adaptive law based on the Popov hyperstability theory has more effectively suppressed the fault. When the fault happens, the original performance is maintained and the error is eliminated as soon as possible. The simulation results demonstrate that the algorithm has a simple structure and few adjustable parameters; meanwhile, the information of the reference model has been adequately exploited. Considering the bounded control input, an adaptive control law based on quantum information technology and the Popov hyperstability theory has better control dynamic performance.

The performance of roll angle rate

The performance of yaw angle rate
7. Conclusion
In this paper, an adaptive controller is designed for a UAV flight control system against faults and parametric uncertainties based on the Popov hyperstability theory and quantum information technology. The robustness of the flight control system is improved and tracking control performances are improved simultaneously. The simulation results demonstrate that a good dynamic performance of the UAV flight control system with faults and parametric uncertainties can be maintained with the proposed method. The paper's conclusion on the UAV flight control system with bounded input has guiding significance for engineering applications. Reducing the conservatism of its conditions needs to be further research.
Footnotes
8. Acknowledgements
The project was supported by the National Natural Science Foundation of China (61074080,60904042), a project funded by the Priority Academic Programme Development of Jiangsu Higher Education Institutions.