
Abstract
In Communication-Based Train Control (CBTC) systems, random transmission delays and packet drops are inevitable in the wireless networks, which could result in unnecessary traction, brakes or even emergency brakes of trains, losses of line capacity and passenger dissatisfaction. This paper applies predictive function control technology with a mixed H2/∞ control approach to improve the control performances. The controller is in the state feedback form and satisfies the requirement of quadratic input and state constraints. A linear matrix inequality (LMI) approach is developed to solve the control problem. The proposed method attenuates disturbances by incorporating H2/∞ into the control scheme. The control command from the automatic train operation (ATO) is included in the reward function to optimize the train's running profile. The influence of transmission delays and packet drops is alleviated through improving the performances of the controller. Simulation results show that the method is effective to improve the performances and robustness of CBTC systems.
1. Introduction
In 1964 the first high-speed train started operating in Japan [1]. Since then, this type of rail system has made great progress mainly in Japan, France, Germany, Italy, Britain, and lately in China. It is mandatory for rail systems to have a reliable and safe automatic train control (ATC) system.
The ATC system plays a vital role in the rail system to ensure safety and efficiency. ATC systems have been studied for many years [2,3], from the earlier track-based train control (TBTC) systems to the modern communication-based train control (CBTC) systems [4–6]. A CBTC system consists of automatic train supervision (ATS), automatic train operation (ATO), automatic train protection (ATP), zone controller (ZC), data communication system (DCS), database storage unit (DSU) and computer interlocking (CI).
Intelligent control strategies emerged in the 1980s to satisfy such real-time multi-objective dynamic operational requirements [7,8]. PID control, genetic algorithms [9–11], fuzzy logic [12–14], expert systems [15] and artificial neural networks [16,17] have been used to improve the safety, efficiency and accuracy of train's profile tracking [18]. Recently, iterative learning control and hybrid control approaches have been proposed [19–21]. ATO algorithms for high-speed trains are now also attracting more and more attentions [22, 23].
The method of combining the H2 norm with the H∞ norm can be a desirable measure to improve the robust performance of the system with uncertainties in its model [24]. Thus, the mixed H2/H∞ performance criterion provides an interesting measure to evaluate controllers. The theoretic motivation for the mixed H2/H∞ control method has been extensively discussed in [25–28]. Some important results about output feedback control can be found in [29–31].
Introduced by Richalet and ADERSA, predictive function control (PFC) is efficiently applied in industrial systems, especially in fast systems [32]. Generalized predicative control (GPC) [33], dynamic matrix control (DMC) [34], PFC [35,36] and model predictive heuristic control (MPHC) [37] follow the same principles, but differ in the model structure and computational complexity. However, DMC and GPC need high computational complexity due to matrix computations and inversions. The control command of PFC does not minimize a cost function. PFC avoids high dimensional matrix computations and inversions, which can reduce the computational time [38], and this is especially important for a fast dynamic system. The robustness in PFC controllers is also important for time varying dynamical systems such as CBTC systems.
A CBTC system is an automatic train control system using bidirectional train-ground communications to transmit train status and control commands to ensure the safe operation of trains. The train-ground data should be transferred accurately, reliably and in real time. However, transmission delays and packet drops are inevitable in train-ground transmission which could result in unnecessary traction, brakes or even emergency brakes of trains, loss of line capacity and passenger dissatisfaction. So we need to develop control algorithms to improve the system performances under transmission delays and packet drops. In this paper, we propose a PFC scheme based on a mixed H2/H∞ control algorithm to improve the performances and robustness of CBTC systems. The proposed method attenuates disturbances by incorporating the well-known robustness guaranteed H2/H∞ into a PFC scheme. The reward function is closely related to the transmission delays in the CBTC systems. The control command

The PFC based on a mixed H2/H∞ train control model.
This paper is organized as follows. In Section II we model the communication-based train control (CBTC) system and describe the problem of the PFC based on a mixed H2/H∞. We derive sufficient conditions, in the form of LMIs, for the existence of control law to achieve the design specifications. In Section III we present an example of CBTC systems to illustrate our algorithm. Finally, we conclude this study in Section IV.
2. Communication-based Train Control System Design
2.1 System Description
The train control model in CBTC systems is presented in Fig.1. According to the dynamic of communication-based train, the train's state space equation can be written as

where T is the sampling rate, which depends on the communication period,
Eq. (1) can be rewritten as
where x(k)={q(k) v(k)} is the state space, wi(k) + wr(k) + ww(k) is the extra resistance acting on the train,

2.2 PFC Based on a Mixed H2/H∞ as a CBTC Controller
Kuntze and Richalet proposed the PFC in [32].
1) Referenced profile: the referenced profile of PFC is given by

where
2) Base Function: the future control variable of PFC is associated with specific base functions which are set according to the process nature and set points, namely the linear combination of the base functions. The base function may be a step function, ramp function, exponential function, etc. The base function makes the controller's output more regular and improves the rapidity of the system response. Both the base function and its sampled value can be computed offline. A little linear weighting coefficient is optimized to reduce the computational complexity. The control variable of PFC is
where μ j is weighting coefficient, N is the number of the base functions and fj(i) is the ith sampled value of the base function. For PFC, when i = 0, it has

The parameters of the PFC controller can influence the performance of the system.
3) Feedback correction: in order to overcome the imprecise of the model, we introduce feedback correction. Feedback correction of the predicted output is based on the error between the actual y(k) and the predicted output ŷp(k)at time k, the predictive output at time k + 1is:

where

If disturbance rejection γ > 0 exists, then

where Tzw is the transfer matrix from w to z. For given H1,… Hmu∈ℜ nhxnu and ū1 …, ū mu >0, the quadratic input constraints are satisfied.

For given E1…Emx∈ℜnexn and x̄1,… x̄ mx >0, the quadratic state constraints are satisfied.

Adding (2) and (5), we can get

We assume that the disturbance is bounded with

where w̄>0.

Consider a quadratic function V(x) = xTPx, P > 0 of the state x(k) of (2). Then



Consider the sum of (11) from k = 0 to k = ∞, to get

Assuming that


where K is defined in (12). An application of the bounded real lemma [30] shows that A is stable and (6) is satisfied if and only if K < 0 and P > 0. Thus

This is an upper bound on the mixed H2/H∞ performance objective. Thus the goal of the robust mixed H2/H∞ PFC is to compute, at each time step, a state-feedback control law
Theorem 2.1 Consider the system defined in (2). Then, if the linear combination of base functions

γ2 is a parameter that can be tuned using simulations, α2is the measure of the contribution of the H2cost, while γ 2 measures the contribution of the H∞ cost, and determines the disturbance rejection level of the control system.
Condition (14) might be considered as the normalized mixed objective function. This is a more natural combination of the control objectives since it emphasizes the trade-off between the normalized H2cost and the normalized H∞ bound.
3. Simulations and Discussions
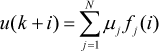
In our simulation, we consider the discrete-time model of a CBTC given by (2), with sampling time Ts = 0.001s and train mass M= 105kg. For the cost function, we set C1=[7.2 0;0 10;0 0] and D12=[0;0;1]. We select a low disturbance rejection level by setting γ =2.5. MATLAB is used to simulate the CBTC system, while the PFC based on a mixed H2/H∞ process is implemented. Fig. 2–Fig. 7 show the performances comparison of different prediction lengths and the effect of disturbance. Fig. 2 and Fig. 4 show the velocity tracking performance of the proposed method under different prediction lengths. As we can see from Fig. 2, the tracking speed profile almost coincides with the ATO's speed profile, which means an improved CBTC performance. The prediction length influences the real-time performance of the system. Fig. 4 shows that the system can track the ATO's speed profile after a long time when the prediction length becomes large. In addition, we can also see there is some overshoot under large prediction length which may lead to the train exceeding the protected speed and affecting safety. A properly selected prediction length can ensure that the proposed method provides better realtime and safety performances. The train position tracking performance under different prediction lengths are given in Fig. 3 and Fig. 5, respectively. As it is shown, with an appropriate prediction length, the proposed method can always track the ATO's position profile accurately to meet the requirement of accurate train parking in a station. But as the prediction length increases, the position tracking performance decreases which may affect the accuracy of train parking. In conclusion, the choice of prediction length in the proposed method is important and the appropriate prediction length can optimize the performances of CBTC. For the disturbance consideration, we introduce a disturbance in the form of w =2 when the sampling time is between 90s and 100s.

The velocity tracking curve of the train (the predictive lengths H1=8, H2=9).

The position tracking curve of the train (the predictive lengths H1=8, H2=9).

The velocity tracking curve of the train (the predictive lengths H1=18, H2=35).
The position tracking curve of the train (the predictive lengths H1=18, H2=35).

The velocity tracking curve with disturbance of the train (the predictive lengths H1=8, H2=9)

The velocity tracking curve with disturbance of the train (the predictive lengths H1=18, H2=35)
Fig. 6 and Fig. 7 give the results of the velocity tracking curve of the train with disturbance under different prediction lengths. The simulation results show that the system can reach stability quickly under the disturbance, meaning that the proposed method has good robustness.
4. Conclusion and Future Work
In CBTC systems, it is very important to improve the controller of ATC systems to mitigate the impact of transmission delays and packet drops. In this paper, we proposed a novel PFC based on a mixed H2/∞ control approach for CBTC systems. Different prediction lengths were studied to optimize the performance of the system. The proposed control method showed the capability of achieving a more complicated CBTC control and good balance between different or even conflicting performance requirements. A challenging future work is to design and implement an adaptive PFC based on a mixed H2/H∞ control to increase the dynamic range of the controller.
Footnotes
5. Acknowledgments
This research was supported by the project of the State Key Laboratory of Rail Traffic Control and Safety (contract no. RCS2011K007, RCS2010ZZ003 and RCS2011ZZ007), Beijing Jiaotong University. It was supported by the National Natural Science Founds (contract no. 61132003). It was also supported by the National High Technology Research and Development Programme of China (contract no. 2011AA110502-1), the project of the Beijing Municipal Science and Technology (contract no. I12H00020) and project - contract no. 2011JBZ014). Bing Bu and Li Zhu are with the State Key Lab. of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing, China (e-mail: