
Abstract
An improved constrained predictive functional control for the pressure of a coke furnace is proposed in this article. In conventional constrained model predictive control, a quadratic programming problem is usually constructed to replace the original cost function and constraints to obtain the optimal control law. Under strict constraints, however, the relevant quadratic programming problem may have no feasible solutions. Unlike conventional approaches, there are several effective relaxations introduced for the constraints in the proposed scheme; then, a new cost function and the new transformed constraints are generated. With the improved constraints and cost function, there are always acceptable solutions for the quadratic programming problem under various conditions. The validity of the presented constrained model predictive control algorithm is evaluated through the regulation of the pressure of the coke furnace.
Introduction
Limited by the actual working conditions of the industrial processes, constraints are the necessary factors needed to be considered in the relevant control strategies.1–3 In practice, it is of significant importance to get the real-time optimal control law for the controlled system under constraints so that more benefits can be acquired and secure operation is guaranteed. 4
As an advanced control strategy that is suitable in dealing with constraints, model predictive control (MPC) has found a wide utilization in different industries.5–7 Owing to the advantage of coping with the constraints in the controlled systems, many other effective algorithms are adopted and there are many vital branches.
As is known to all, the performance index of the constrained MPC scheme can be converted into a standard problem of quadratic programming (QP) in a certain way, and with solving that QP optimization, its optimal control law can be derived. 8 Many scholars have devoted themselves to promote the development of QP optimization with constrained MPC schemes. In the work by Wang and Boyd, 9 a series of methods for promoting the speed of MPC that solves a quadratic program was described. Li et al. 10 studied a new vehicular adaptive cruise control system where the problems about tracking capability, fuel economy and desired response can be comprehensively addressed by that system. Wills et al. 11 proposed and examined a new approach of employing MPC. In the work by Tenny et al., 12 an algorithm of trust-region feasibility-perturbed sequential QP was brought into solving some issues about nonlinear MPC. A new QP method was tailored and applied to a large MPC application by Bartlett et al. 13 Patrinos and Bemporad 14 presented a method of dual fast gradient projection so as to achieve the solutions of QP problems that appear on MPC for constrained nonlinear systems.
Meanwhile, the linear programming (LP) approach is also introduced to handle the constraints in MPC and there are many important results. In the work by Bemporad et al. 15 MPC strategies employing an LP algorithm were studied to handle with constrained systems. A novel algorithm for solving multiparametric LP problems was proposed by Borrelli et al. 16 Rao and Rawlings 17 explored MPC using LP to promote the performance of computation. A new method that combines online MPC paradigm with explicit MPC paradigm for surmounting their individual limitations was introduced by literature. 18 Lee and Kouvaritakis 19 exploited an algorithm of receding horizon MPC for systems under input constraints and model uncertainty. MPC was applied into the control and coordination of the urban traffic networks by Lin et al. 20 Ferrari-Trecate et al. 21 mentioned that the short-term scheduling optimization can be achieved by developing hybrid system in the combined cycle power plants. Zhang et al. 22 extended the LP to positive systems.
For the robust constrained MPC schemes, linear matrix inequalities (LMIs) are usually adopted and the relevant fruits are also abundant. In the work by Wan and Kothare, 23 a robust constrained MPC algorithm was developed using the notion of an invariant ellipsoid with asymptotical stabilization. Zhang et al. 24 studied a robust constrained MPC for uncertain fuzzy affine systems. By utilizing linear Lyapunov functions, stochastic stabilization procedures were investigated to deal with the constrained systems which encounter multiplicative disturbances by Bernardini and Bemporad. 25 In the work by Ding et al., 26 the polytopic constrained systems in which measurement noise and disturbance are existent were regulated by a synthetic robust MPC method. The min–max optimization of MPC was studied by Zhang et al. 27 A new solution procedure to the issue of robust MPC for uncertain systems with hard constraints and bounded disturbances was put forward by Tahir and Jaimoukha. 28 Li et al. 29 studied a robust MPC to achieve the train management on transportation of underground railway.
Besides the aforementioned branches, there are still many other significant viewpoints. For the traditional QP-based constrained MPC scheme, when the constraints are strict, feasible solutions may not be obtained, which will deteriorate the performance of the control system. It is still an unresolved problem to find the optimal control law under such constraints. In this paper, novel relaxations for the constraints were first introduced by us and then a new cost function and constraints are generated. The proposed idea is tested on the predictive functional control (PFC) algorithm for a coke furnace, which was previously studied in the literature. 30 Under the improved cost function and constraints, there are always acceptable solutions for the relevant control scheme. Taking a chamber pressure regulation process on a coke furnace as an example, the effectiveness of the proposed QP-based constrained PFC is illustrated.
This paper’s structure is as follows. Section “Coke furnace” describes the relevant process flowchart. The traditional QP-based constrained PFC strategy is briefly drawn into section “Conventional constrained PFC.” The proposed constrained PFC scheme is discussed amply in section “Proposed constrained PFC.” Section “Case studies” simulates the adjustment of the pressure process. The conclusion is given in section “Conclusion.”
Coke furnace
Process flowchart
Figure 1 displays the detailed process flowchart of the coke furnace. 31 First, branches FRC8103 and FRC8104 are divided from the residual oil, and then they are delivered to the corresponding convention room (F101/3) for heat treatment. When the two branches are heated approximately to 330 °C, they will converge and exchange heat with the gas oil which comes from coke towers T101/5,6 in fractionating tower T102. Under the action of pumps (102/1,2,3), branches FRC8107 and FRC8108 are generated from the circulating oil which is the mixture of part residual oil and gas oil at the end of the heat exchange process. After that, they will be heated to about 495 °C in the room of radiation and sent to the towers T101/5,6 for the subsequent coke-removing process.
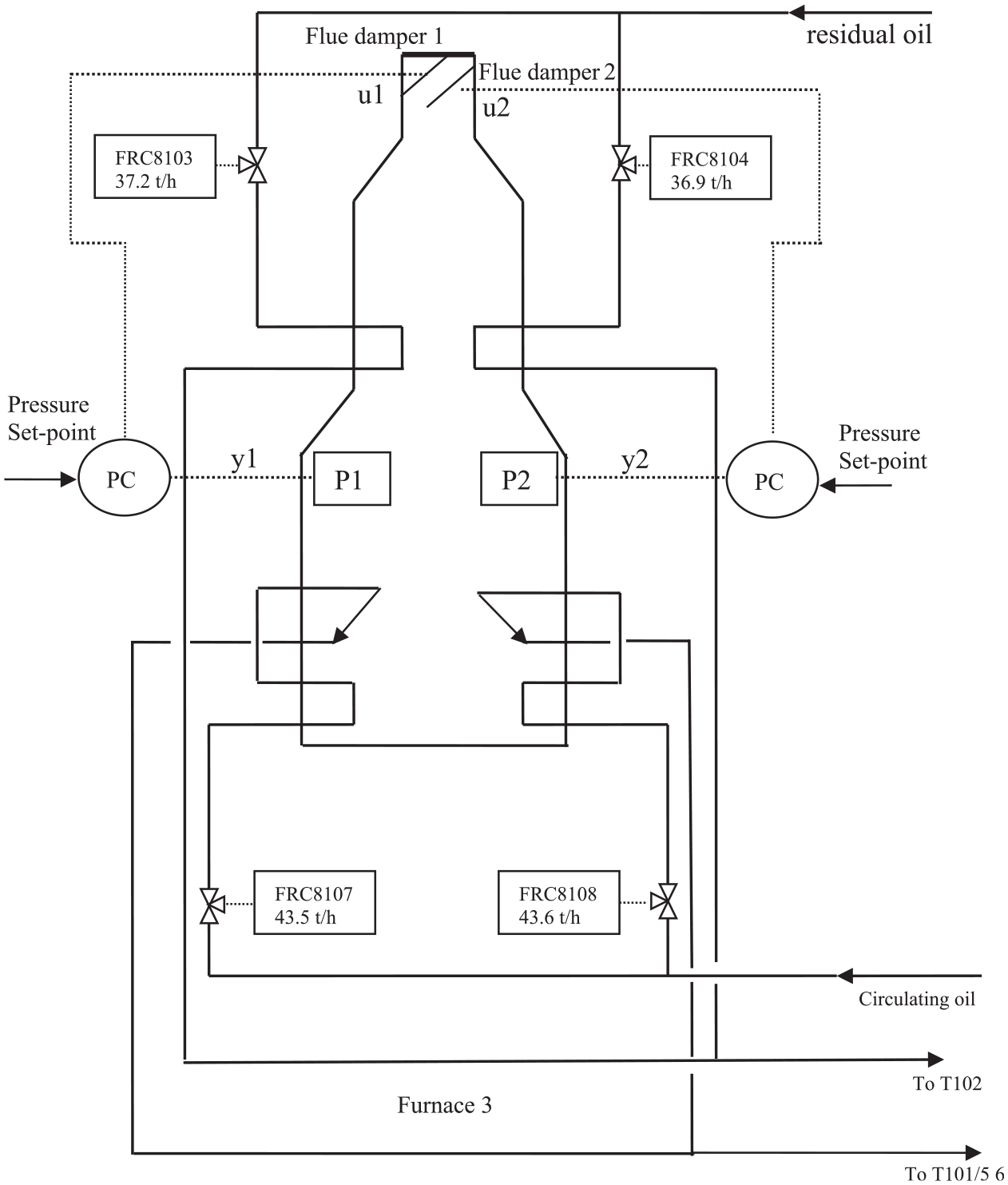
Flowchart in coke furnace F101/3.
The pressure regulation process
For the sake of guaranteeing the secure and valid operation of the coking process, it is necessary to control the chamber pressure to the required value. Limited by actual working conditions, there are constraints for the pressure regulation process inevitably. Meanwhile, the model/plant mismatch, disturbances and other uncertainties may cause the working conditions more worse; thus, the relevant constraints may be too strict. The controller exposed all the aforementioned factors are difficult to get that optimal control law under such constraints.
The purpose of the following controller design is to make the coke furnace pressure close to the set-point trajectory under constraint conditions and different uncertainties.
Conventional constrained PFC
For simplicity, a process which is single-input single-output (SISO) and can be represented by the following transfer function model is considered, which also makes it straightforward to extend to the multivariable case

where
The discrete time model can be obtained from the transfer function model shown in equation (1) under sampling time

where
To handle the time delay in equation (2) preferably, the idea of Smith predictor is considered into compensating for the model output and the process output


where
According to equation (3), the output prediction of the compensation model obtained from time instant

where
The feedback error between the model and the process is defined as follows

And the reference output is selected as

where
The following objective function is chosen for the traditional constrained PFC strategy

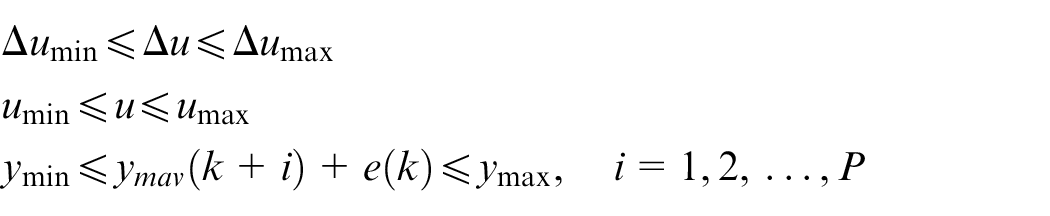
subject to
where
In order to adopt the QP algorithm, the following standard QP problem by decomposing equation (8) can be obtained

subject to

where




By settling the problem of QP in equation (9), we can acquire the relevant optimal control input.
Remark 1
In equation (9), the problem of QP may not always be feasible when the relevant constraints are too strict. Under such conditions, there will be no suitable control input for the controlled process.
Proposed constrained PFC
Referring to the derivation procedure in the conventional constrained PFC scheme, we can obtain equations (1–8) first.
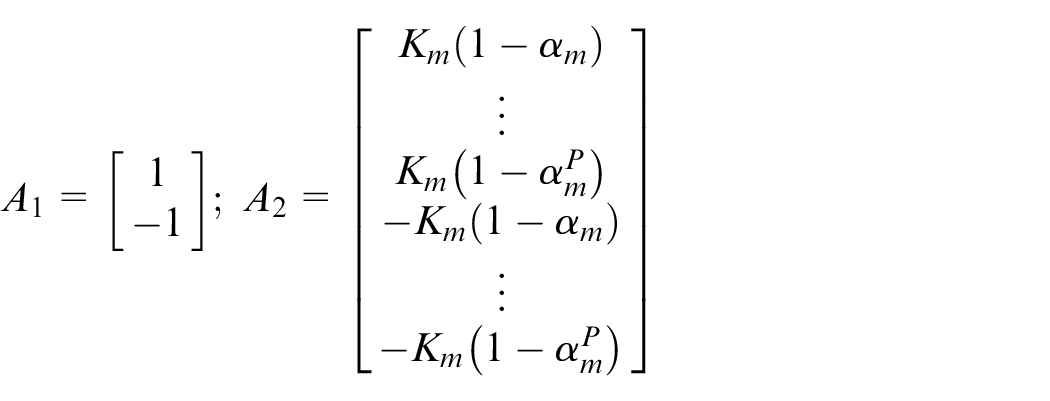
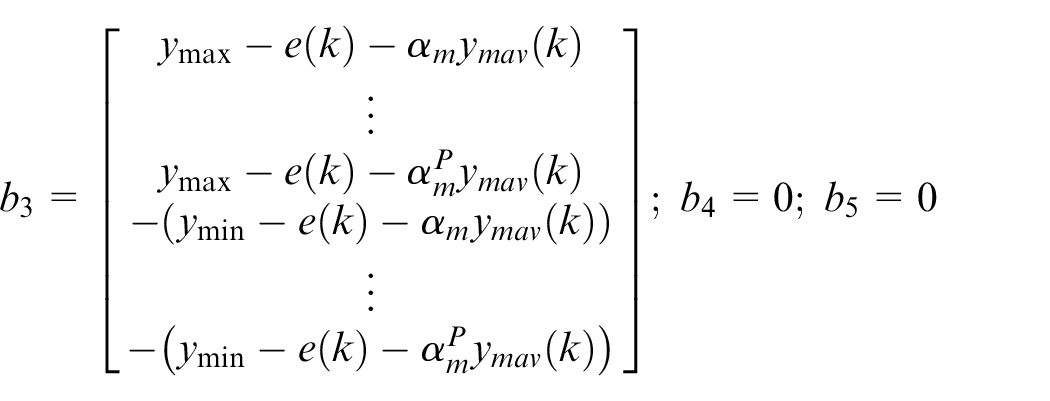
Unlike the conventional approach, here, we introduce several relaxations for the constraints on output as follows
where
Remark 2
We can easily find that the output constraints in equation (10) will be equivalent to equation (8) under the condition that
By utilizing the improved output constraints expressed in equation (10), the following new performance index is gained

subject to
where
Remark 3
In equation (11), when the output constraints are too strict, the relevant relaxations will work. Through the relaxations, the subsequent QP problem always has feasible solutions. Meanwhile, the minimum of constraint violation can be guaranteed by the improved cost function.
The relevant QP problem for equation (11) is

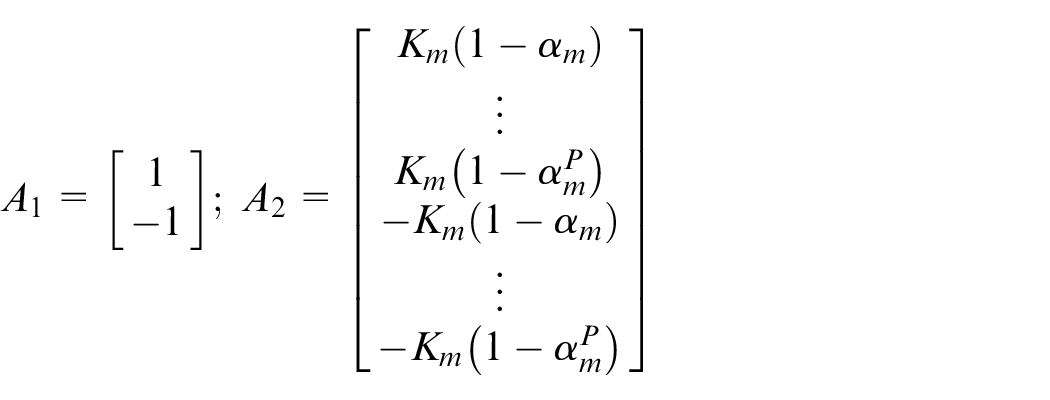
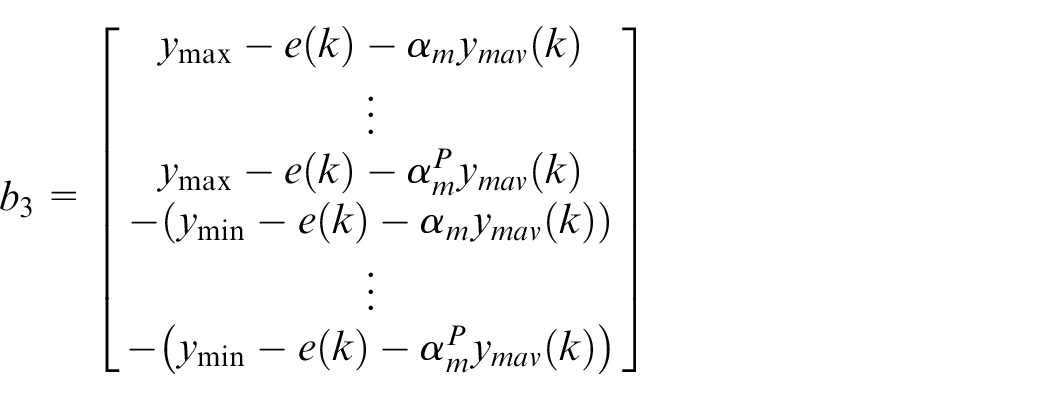
subject to

where





the
The optimal control input under the presented constrained PFC scheme can be acquired by solving the QP problem in equation (12).
Case studies
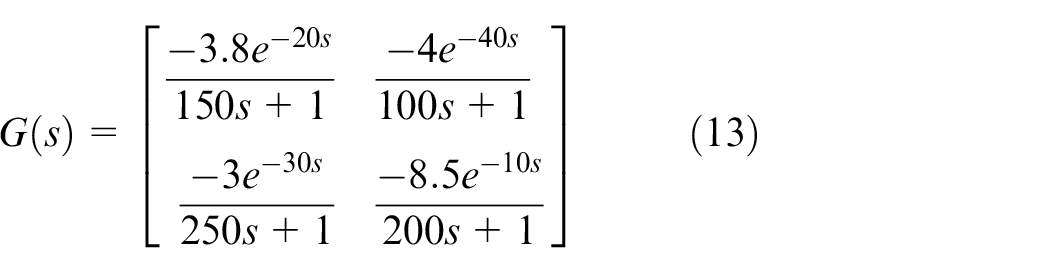
The following multivariable chamber pressure regulation process can be considered, which is obtained through the step-response test
The traditional constrained PFC scheme is introduced here and compared to verify effectiveness of the proposed scheme.
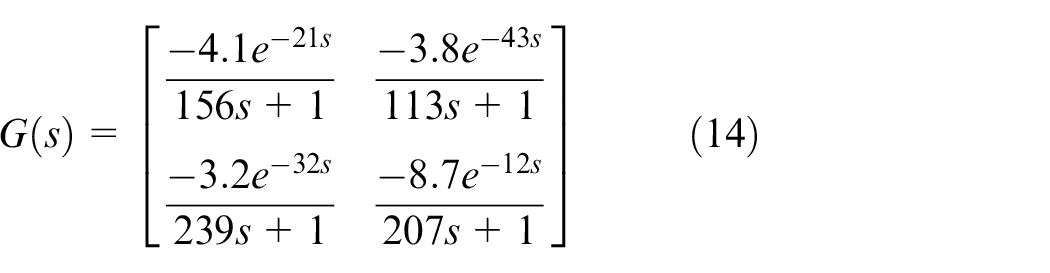
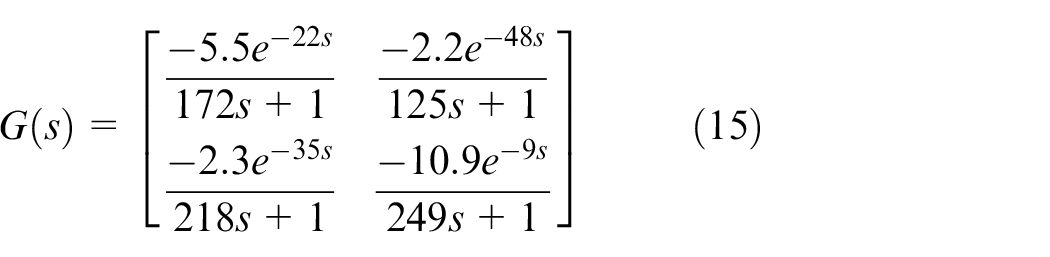
Note that uncertainties existed in the process and this always causes model/plant mismatches. Here, equation (13) is adopted as the model for designing the corresponding PFC controller, while Monte Carlo simulations are applied into producing three cases of real process for testing the performance of control. It means that the constrained PFC will be designed based on equation (13) and applied to control three cases of potential real process described by the below equations.
Case 1
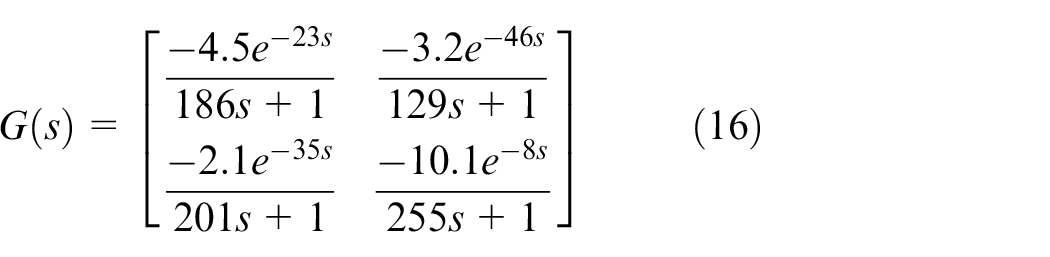
Case 2
Case 3
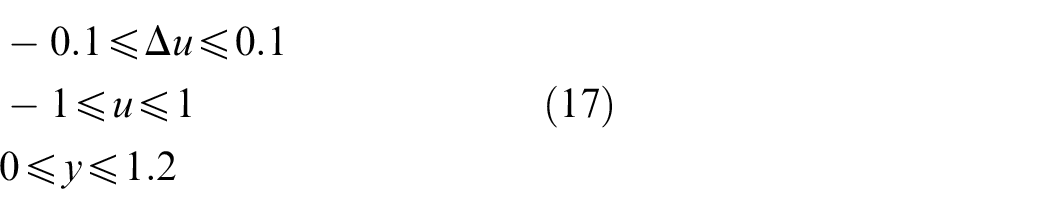
For the three cases, the constraints are chosen as
Case 1
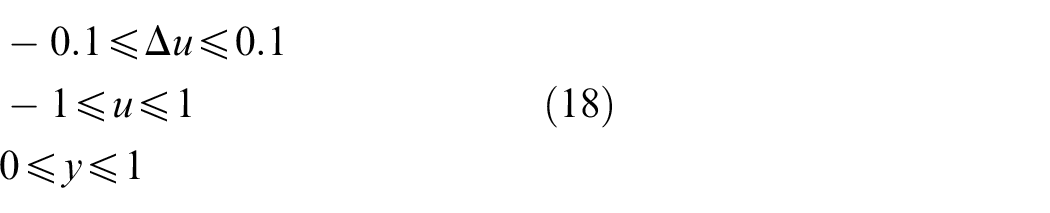
Case 2
Case 3
It is verified that the constraints in equation (17) are relatively loose and these are chosen to show the relationships between two constrained PFC strategies. As to case 2, the constraints are stricter, and this is to show the corresponding differences between two approaches. As to case 3, the constraints are even stricter, and this will further reveal the effectiveness of the proposed approach.
There are selected values with sample time of 5 s. Under case 1 and case 2, the amplitude of the set-point is selected as 1 for all process outputs. Meanwhile, the disturbance whose amplitude is −0.02 is considered for both outputs. In case 3, the desired values are chosen as −1 and 1 for two process outputs. At the same time, the disturbances whose amplitudes are −0.02 and 0.02 are introduced for two process outputs, separately. Table 1 presents the relevant tuning parameters.
Tuning parameters for two schemes.
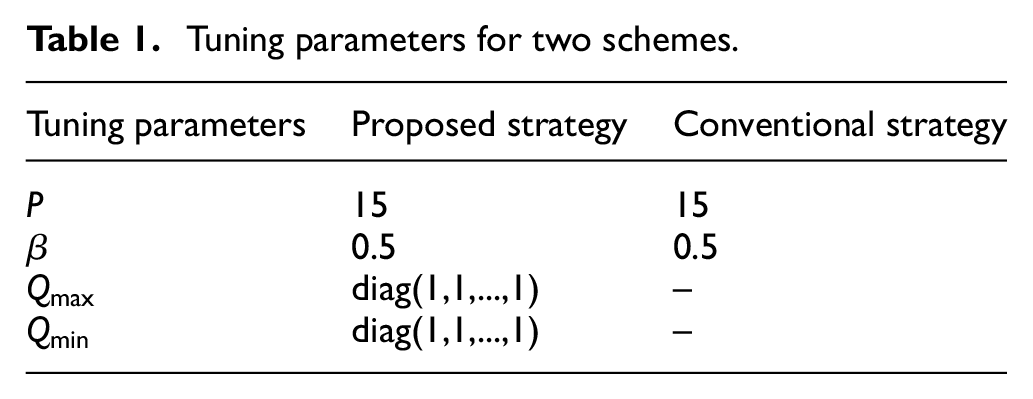
Figure 2(a)–(c) shows both approaches’ responses under case 1. It is easy to see that the responses of the two approaches are the same. In case 1, the constraints are loose and the degree of the model/plant mismatch is small, so that two approaches can both obtain the optimal control law, and their control performances are acceptable. In a sense, it proves that the proposed strategy is equivalent to the traditional scheme under good conditions.
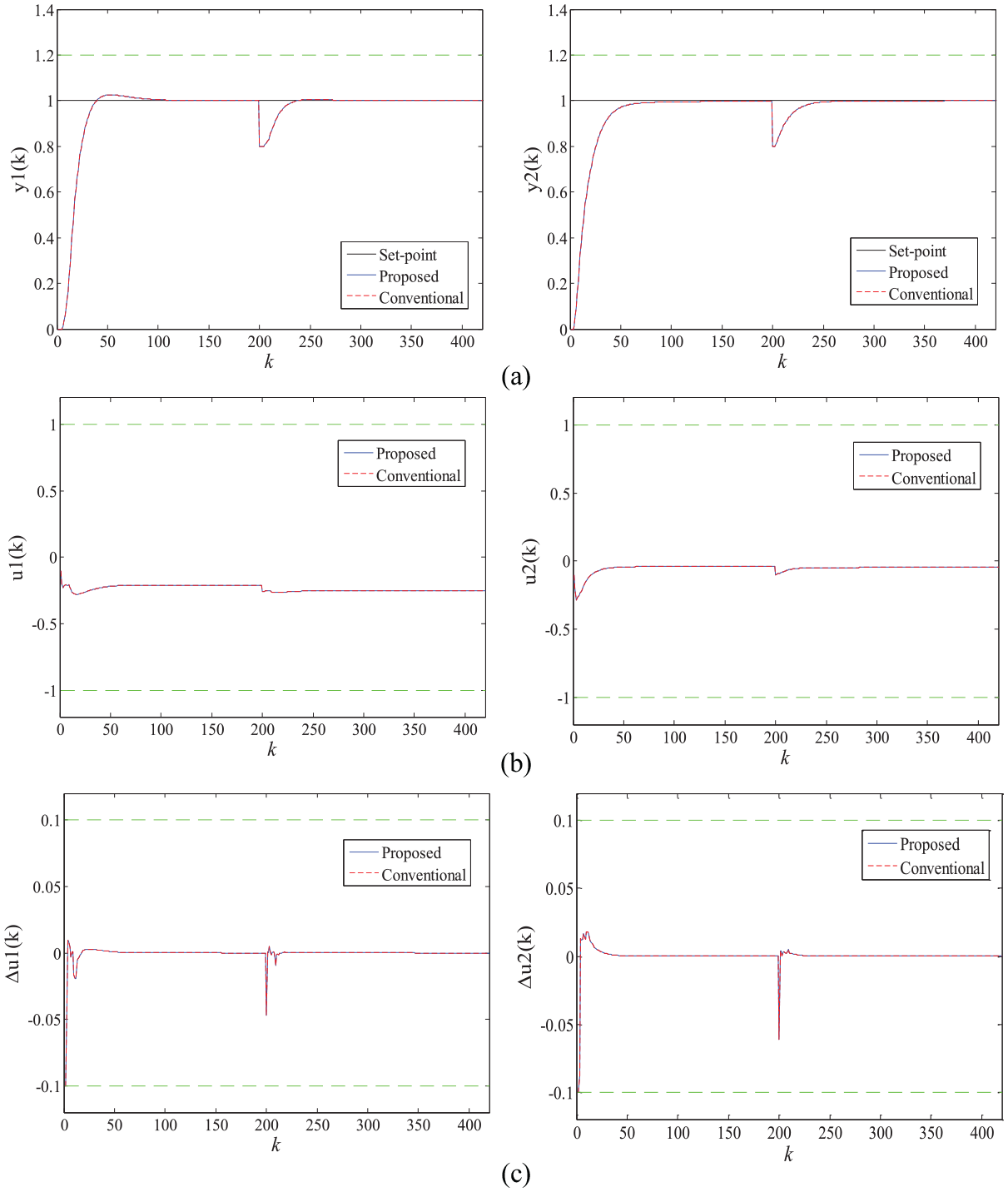
(a) Process outputs for two approaches under case 1, (b) input signals under case 1 and (c) input increment signals under case 1.
Figure 3(a)–(c) displays responses of two constrained PFC strategies under case 2. Compared with the situations in case 1, the extent of the model/plant mismatch is larger. Meanwhile, the constraints on output are also stricter. In general, the proposed strategy shows better control performance than that of the traditional method. The outputs’ responses of the conventional approach show serious oscillation and bigger overshoot. The responses of the proposed method are still acceptable.
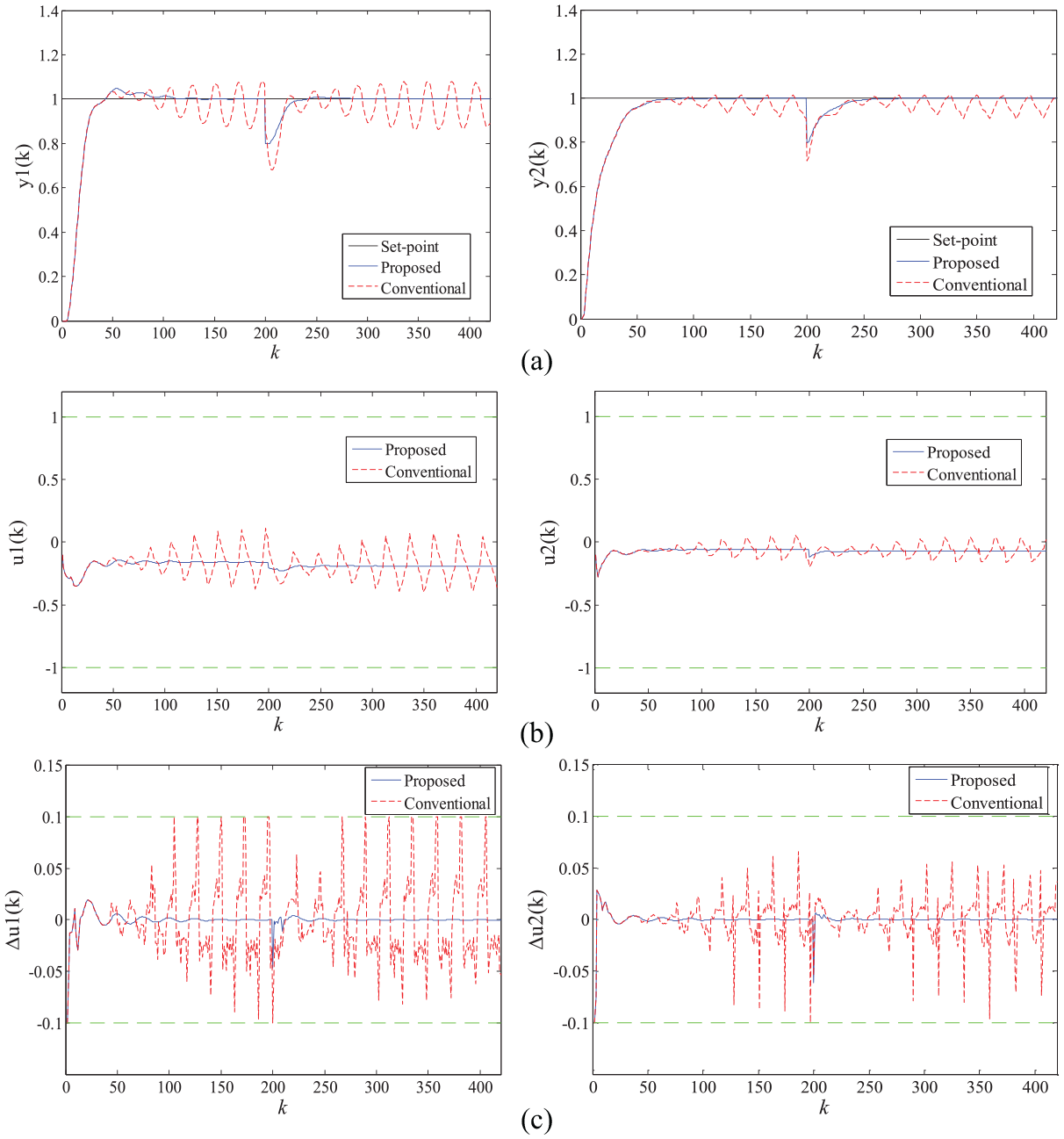
(a) Process outputs for both methods under case 2, (b) input signals under case 2 and (c) input increment signals under case 2.
The responses for the two strategies under case 3 are shown in Figure 4(a)–(c). In case 3, the input increment constraints are stricter, and desired values of two process outputs are set to be in opposite directions to further investigate the performance of the two methods. Here, the solutions of the conventional scheme violate the constraints, as shown in Figure 4(b)–(c). At the same time, the responses of the conventional approach are not satisfactory. The control performance for the proposed strategy under such situations is still acceptable, which implies that the presented constrained PFC scheme offers enhanced control effect.
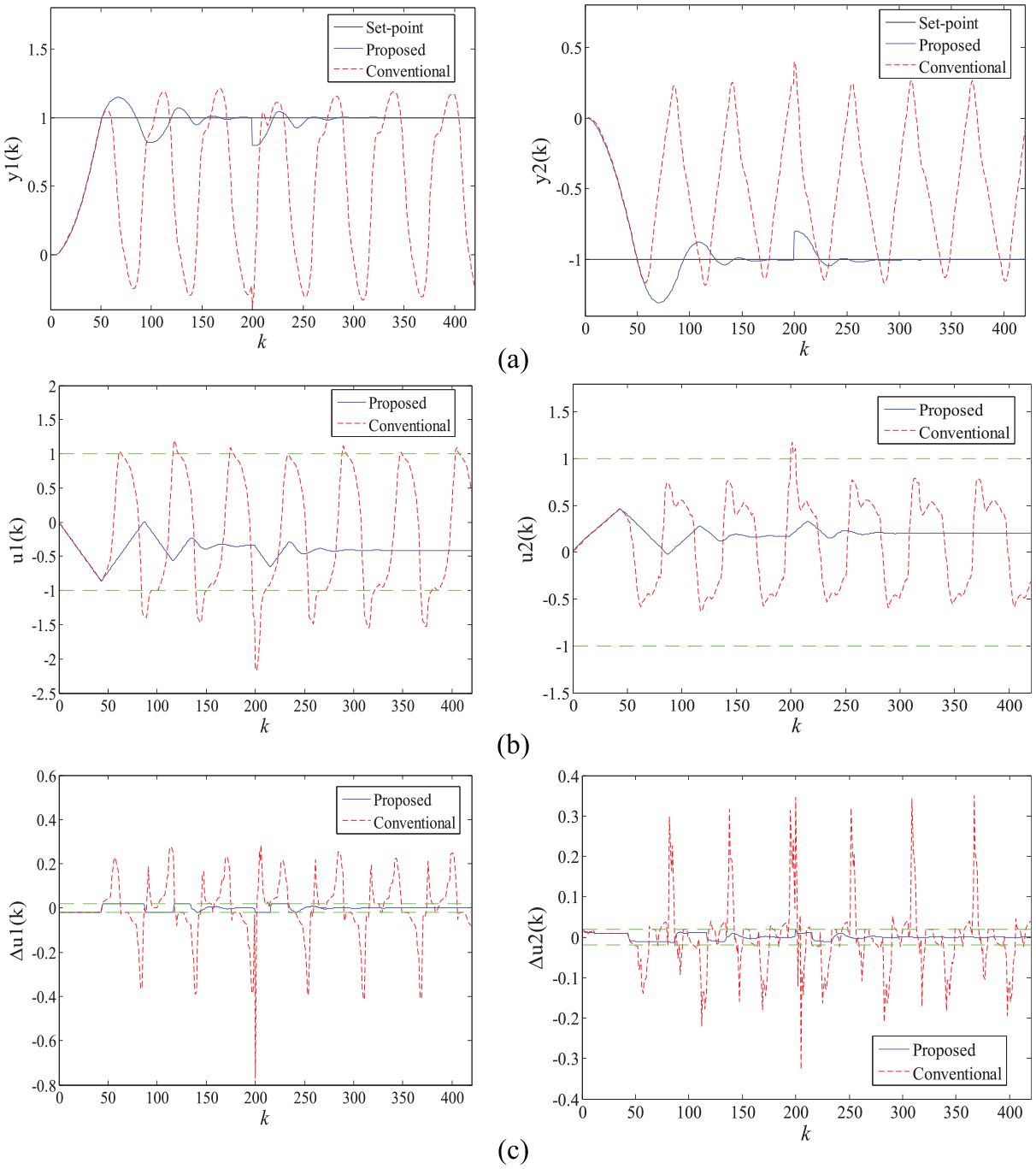
(a) Process outputs for two strategies under case 3, (b) input signals under case 3 and (c) input increment signals under case 3.
Conclusion
On the basis of constrained MPC strategy, a novel QP is proposed in this paper. There are several relaxations introduced for the constraints in the proposed method so that more degrees are provided for the relevant QP problem, and then the performance of good ensemble control can be expected. A case study about the regulation of the pressure process verifies the validity of the presented approach.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.