
Abstract
An adaptive control approach is proposed for trajectory tracking and obstacle avoidance for mobile robots with consideration given to unknown sliding. A kinematic model of mobile robots is established in this paper, in which both longitudinal and lateral sliding are considered and processed as three time-varying parameters. A sliding model observer is introduced to estimate the sliding parameters online. A stable tracking control law for this nonholonomic system is proposed to compensate the unknown sliding effect. From Lyapunov-stability analysis, it is proved, regardless of unknown sliding, that tracking errors of the controlled closed-loop system are asymptotically stable, the tracking errors converge to zero outside the obstacle detection region and obstacle avoidance is guaranteed inside the obstacle detection region. The efficiency and robustness of the proposed control system are verified by simulation results.
Keywords
1. Introduction
The past last few decades have witnessed an ambitious research effort in the area of motion control of mobile robot (see [1–14] and the references therein). These works always assume that the mobile robots are subject to ‘pure rolling without slipping’, namely they keep nonholonomic constraints for controlling mobile robots. However, sliding effects have a critical influence on the performance of mobile robots that cannot be neglected. It means that we should deal with the mobile robot model with sliding induced from perturbed non-homonymic constraints for more a practical consideration. With this in mind, some researchers have studied approaches for controlling mobile robots considering skidding and slipping [15–19]. In [15, 16], only the skidding effect was considered. Wang and Low [17] proposed models of wheeled mobile robots (WMRs) considering the sliding of both wheels and analysed their controllability according to the manoeuvrability of mobile robots. They also designed controllers for path following and the tracking of mobile robots that took sliding into consideration [18,19]. However, the information on skidding and slipping should be measured by a global positioning system (GPS), but only kinematics was used to design the controllers in [18,19]. Besides, the works [17–19] did not include any ideas for obstacle avoidance for mobile robots in the presence of wheel sliding.
Owing to the difficulty in handling both tracking and obstacle avoidance using one controller, there are few results available on the tracking control problem for nonholonomic mobile robots with obstacle avoidance, even though the problem is practical and important. Recently, some research work has investigated the problem on the kinematic level [20,21] and on the dynamic level [22–24]. The control approaches reported in [20,22] are commonly designed into tracking controllers with obstacle avoidance capability by using position tracking errors without coordinate transformation. However, some methods were developed without considering skidding and slipping effects [20–22] and obstacle avoidance is not considered in [23]. In [24], an adaptive controller is designed for trajectory tracking and obstacle avoidance in mobile robots and considers unknown sliding on the dynamic level by a backstepping approach. However, the design process of this controller is very complex and its implementation is not easy. This point motivates us to extend the study on tracking and obstacle avoidance in the presence of unknown sliding.
The main contributions of our work are the design of an adaptive control system, on the kinematics level, for tracking and obstacle avoidance for a class of mobile robots in the presence of unknown sliding. More specifically, in the theoretical part of this paper, we design a controller that guarantees tracking with bounded error and obstacle collision avoidance for mobile robot systems with unknown sliding. We assume that each robot knows its position and can detect the presence of any object within a given range. We apply this result to the control of the mobile robot system. Firstly, a kinematic model of mobile robots considering the influence of sliding is established where sliding is modelled as three time-varying parameters. Secondly, the time-varying sliding parameters are estimated by the sliding model observer online. The proposed adaptive controller is designed using Lyapunov design techniques where the angular velocities of the wheels are considered as the immediate controls to deal with unmatched sliding at the robot kinematics level. By using the Lyapunov stability approach with a potential function, we prove that the tracking errors of a controlled closed-loop system can converge asymptotically. The tracking errors converge to zero outside the obstacle detection region and no-collision between the robot and the obstacle is guaranteed inside the obstacle detection region, regardless of unknown sliding. Finally, simulation results are included to demonstrate the effectiveness of the proposed control approach.
This paper is organised as follows. In Section 2, we present the kinematic model of mobile robots considering the sliding influence, where sliding is modelled as three time-varying parameters. In Section 3, the sliding observer is employed to estimate sliding parameters and is introduced in detail. In Section 4, a controller is designed that guarantees tracking and obstacle avoidance for the mobile robot in the presence of sliding and the stability of the proposed control system is analysed. Simulation results are discussed in Section 5. Finally, Section 6 gives some conclusions.
2. Kinematic model of a wheeled mobile robot in the presence of sliding
A simple differentially steered WMR is shown as Fig.1. It has two differential driving wheels and two back caster wheels. The two driving wheels are powered independently by two DC servo motors respectively and have the same wheel radius.

Tracked mobile robot with two independent driving wheels
To describe the motion features of a tracked mobile robot simply and rigorously in the general plane of motion, a fixed reference coordinate frame F1(X,Y) and a moving coordinate frame F2 (x, y) which attaches to the robot body with the origin at the geometric centre O, are defined
The linear velocities of left and right driving wheels of mobile robot without sliding are represented as follows

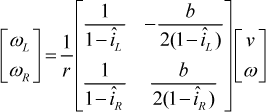
where ωL and ωR are the angular velocities of the left and right wheels respectively, r is radius of the wheels. The longitudinal slip ratios of the left and right wheels of a tracked mobile robot are defined as follows [25]

where vLs and vs are respectively, the linear velocities of the left and right wheels of the mobile robot in the presence of wheel slipping. The range of the longitudinal slip ratio iR and iL lies between [0,1]. The lateral sliding ratio of a tracked mobile robot is defined as [25]:

where α is the lateral sliding angle of a mobile robot (see Fig.1). From Equation (2), the linear velocities of the left and right wheels of the mobile robot in the presence of wheel slipping are given as:
In the coordinate frame F1 (X, Y) and in the absence of wheel slipping the kinematic model of the WMR is described by:
In the coordinate frame F2(x,y) a suitable model with sliding can be written as:

where b is the distance between the two driving wheels. As shown in Fig.1, the relationship of the coordinate transformation from F1(X,Y) to F2 (x, y) is given by

From equations (6) and (7), in the coordinate frame F1(X,Y), the kinematic model of the differential WMR with sliding is described as follows:

where [X, Y, θ] T is the posture vector of mobile robot, θ is the heading angle of the WMR (the angle that is between the motion direction of robot and the positive direction of the X axis).
If

If we define an auxiliary control input ū= [v, ω]T, then the relationship between the auxiliary control input and effective control input u = [ωL,ωR]T is regarded as:

where the matrix

Equation (8) can be written as:

As can be seen from Equation (8), to solve the tracking control problem of a WMR with unknown sliding parameters iR,iL and δ, the top priority is to estimate the time-varying sliding parameters online and then to design the tracking controller on the basis of the sliding parameter estimations.
3. Robot sliding parameter estimation schemes
3.1 Design of nonlinear sliding model observer
The SMO (Sliding Model Observer) is a popular approach for state estimation, since it can deal with uncertainty in the system [26]. In this paper, an SMO [26–29] is designed to estimate sliding parameters, based on the kinematics model of the robot, sensor feedback of the robot's trajectory and the driving wheel speeds. Due to the inherent non-linear nature of the robot kinematics equations, it is a complex problem to obtain an estimation of the robot sliding parameters. The kinematics equations have to be linearized at a nominal trajectory when a linear estimator such as the Kalman Filter is applied to estimate the slipping parameters. Furthermore, measurements from inertia sensors include significant noise, it is very important for the observer to be robust against noise and model uncertainty. With an SMO, the control action switches from one value to another in finite time and this may cause chattering problems; to avoid this effect, the discontinuous terms go through a Low Pass Filter. An SMO is used to estimate the motor torque based on a single-input, single-output dynamics system as in [26]. In [28] two variables: disturbance and steering angle are estimated using an SMO, however the chattering is unavoidable due to the switching of sign function. The paper applies this approach to the multi-input, multi-output dynamics system and reduces the chattering by passing discontinuous terms from the observers through a low pass filter.
The observer takes the form as follows:
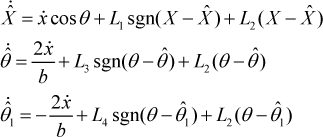
where Li > 0,1 = 1,2, … 4 are sliding model gains,
Errors are defined as
The error dynamics should converge to the sliding surface in a finite time by the appropriate choice of sliding gains,

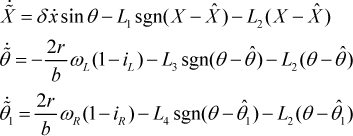
If the driving wheels angular velocities ωL, ωR are measurable, the robot trajectory and sliding gains L1, L2, L3, L4 are given. Moreover, a low pass filter is applied to reduce the chattering of the SMO, then the sliding parameter estimations

where (·)
LPF
denotes an LPF (Low Pass Filter). The values of terms

Filtering processing of the estimation signal
The relationship between input u and output y of the LPF is given as:

where
3.2 Determination of switching gains
The switching gains Li, i = 1,3,4 must be negative and large enough to satisfy the reaching condition of the sliding model. However, if it is too large, the chattering noise may lead to estimation errors. In this section, a proper selection of Li, i = 1,3,4 is discussed.
In the following, the stability of the Sliding Model Observer (SMO) is discussed. The switching functions are defined as

To ensure stability, the SMO dynamics must exhibit the following characteristics: (1) The error state must reach the sliding surface from an arbitrary point in error space in a finite time and (2) the error dynamics must be stable in some neighbourhood of the sliding surface. To enforce stability, the sliding mode gains should be chosen such that sn · ṡn < 0, n = 1,2,3. It is shown in reference [26] that the error dynamics will converge in finite time if the conditions sn · sn <0, n = 1,2,3 are satisfied. Applying this approach:

From inequality (19), we know that if:
then s1 · ṡ0. Similarly:

From inequality (21), we know that if:
then s2ṡ2 < 0. Thus sliding mode can be enforced if:
then s3ṡ3 < 0.
In practice, L1 = |ẋ sin θ|, L2 is a small positive number, L3=4r/bωL and L4 =4r/bωR. If the lateral sliding angle α is expected to be large (as is the case for steep side slopes with loose soil) the trial-and-error method can be used to determine L1.
4. Design of the tracking and obstacle avoidance controller
4.1 Potential function for obstacle avoidance
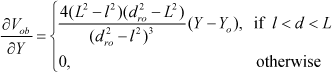
To deal with the obstacle avoidance of mobile robots in the presence of sliding, we consider the following potential function: [24]
where l > 0 and L > 0 with L > l > b > 0 are radii of the avoidance and detection regions (see Fig.3), respectively. The parameter l can be chosen by considering the radius of the mobile robot body. The distance function dro between the robot and the obstacle is:


Wheeled mobile robot with avoidance and detection region
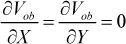
with the obstacle position (Xo, Yo). The function (24) goes to infinity as the boundary of the avoidance region for the mobile robot approaches the obstacle and is zero outside the detection region.
The partial derivatives of the potential function Vob with respect to the X and Y coordinates which would be required in the controller design procedure can be defined as:


where e3 =θ–θr is the orientation error and a is the lateral sliding angle of a mobile robot (in Fig.1). We define robot tracking errors: e1 = X – Xr, e2 = Y – Yr.
(1) Outside the detection region (dro > L) and for (e1, e2) ≠ (0,0) we have θr = A tan 2(–e2, –e1). The reference trajectory is such that it does not initiate sharp turns of 90° with respect to the current orientation of the robot. Note that this condition is not too restrictive since the robot can reorient itself on the spot if the condition is not satisfied and smoothness of the reference trajectory is a reasonable assumption in the case of robots subject to nonholonomic constraints.
(2) Inside the detection region (l<dro<L), we have
The combination of obstacle position and reference trajectory might drive the robot into a singular configuration where Assumption 1 does not hold. One solution is to consider a perturbed desired orientation
4.2 Design of controller
4.2.1 Control objective
The control objective is to design an adaptive control law for mobile robots considering the kinematics (8) with unknown sliding so that:
1. Outside the detection region (dro ≥ L), the mobile robot tracks the reference trajectory generated by the following reference robot:
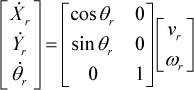
where Xr, Yr and θr are the position and orientation of the reference robot and, vr and ωr are the linear and angular velocities of the reference robot.
2. Inside the detection region (l < dro < L), the mobile robot safely avoids obstacles under the influence of the reference trajectory Ẋr =Ẏr =0 and θr = A tan 2(–EY, –EX) with:

while all other signals remain semi-globally uniformly ultimately bounded.

Hence:

where

where [t–T,t] is quite a short sliding time window. We assume that

where EX, EY,
4.2.2 Design of controller
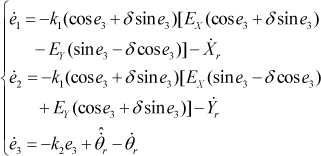
Define the tracking errors of a mobile robot as e1 = X – Xr, e2 =Y – Yr, e3 = θ–θr; the tracking error vectors of mobile robot are defined as e = [e1, e2,e3]T. From Equation (12), the error dynamic equation of a mobile robot is obtained as:

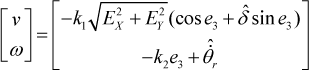
In the presence of sliding, we employ the Lyapunov direct method; the auxiliary control input is obtained as follows:

where k1 and k2 are positive constants.
Now, if the sliding parameters iR, iL and δ that appear in (8) are unknown, we cannot choose directly the auxiliary control input as given by (36). Hence, we design a sliding model observer (13) to attain the control objective using estimations of iR, iL and δ. If îL, îR and
where
As can be seen from the above analysis, trajectory tracking and obstacle avoidance using a closed-loop control principle for the mobile robot can be described by the following scheme (See Fig.4).
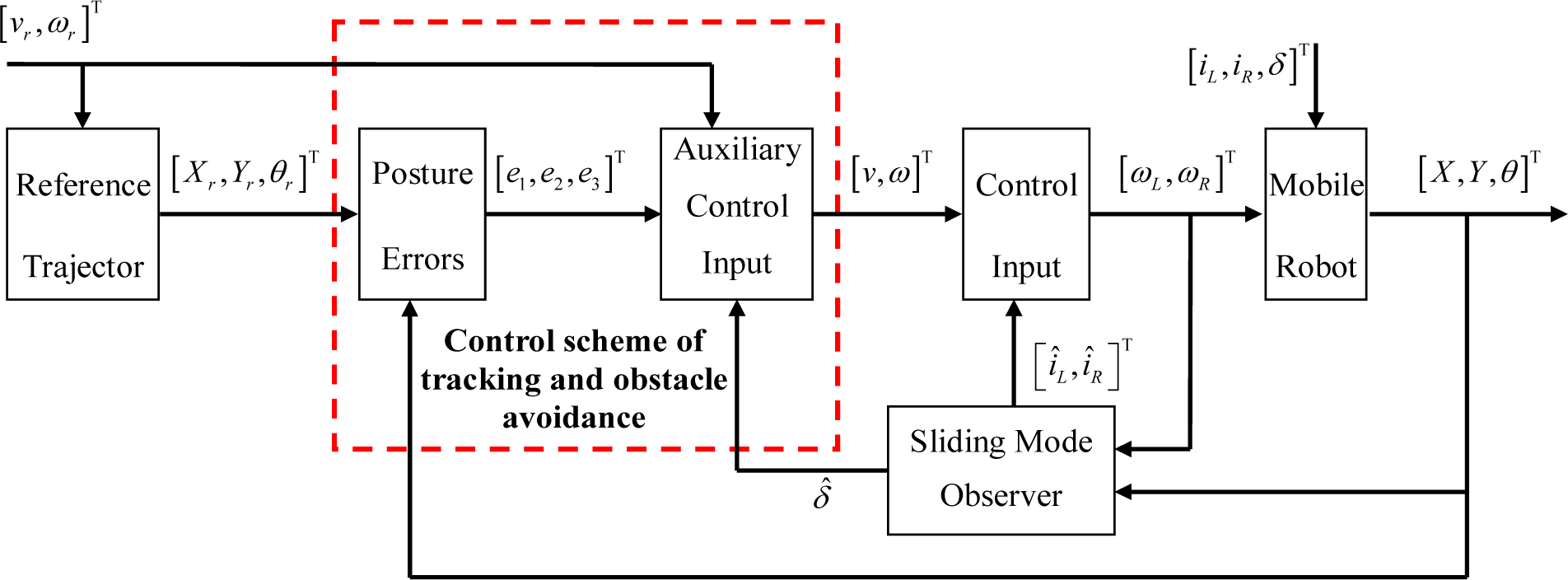
Mobile robot trajectory tracking and obstacle avoidance control principle scheme
4.2.3 Stability analysis of control system

for all gains k1 > 0, k2 > 0 and the singular case

The derivative of the Lyapunov function V is given by

From equations (35) and (36), the closed-loop error dynamic equation can be obtained as follows:

From the equation θr = A tan2(–EY, –EX), we can obtain the following:

Then Equation (41) can be rewritten as:
From Equation (30) we know:

Moreover, notice that:

Substituting equations (43)∼(45) into Equation (40), we can obtain:

1. When the robot is outside the detection range (dro > L), we have
Then, the inequality (46) becomes
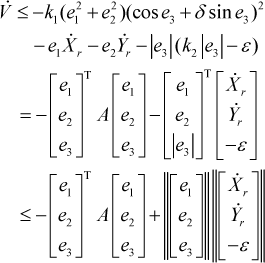
where:


where λmin(A) denotes the minimum eigenvalue of matrix A. Therefore, the stability of the error dynamic equation and tracking with bounded error are guaranteed outside the detection region. Moreover, we can decrease the tracking error by increasing the gains k1 and k2.
2. When the robot is inside the detection range (l < dro < L), Assumption 2 implies Ẋr = Ẏr = 0, the inequality(46) becomes:

V̇ is negatively defined for:

Hence, as shown by Stipanovic et al. [20], since dV / dt is negatively defined V is non-increasing inside the detection region. Since:
where z = [X Y]T and zo = [Xo Yo]T obstacle avoidance is guaranteed.
which corresponds to e1 = e2 = 0 and this case can easily be handled using zero controllers u = v = 0. The second case occurs inside the detection region where the condition corresponds to a singularity in which the reference direction vector for tracking is of opposite but equal magnitude to the direction vector for avoiding collision; this results in a deadlock situation. This case can be handled by changing the reference trajectory to drive the robot out of the singularity. We do not investigate this case further in this paper.
5. Simulation results
To validate the effectiveness of the proposed adaptive control scheme, we perform simulations for trajectory tracking and obstacle avoidance for mobile robots in the presence unknown sliding. In this simulation we choose the system parameters as r = 0.125m and b=0.5m. The detection and avoidance radii are L = 4m and l = 2m.
5.1 Straight line reference trajectory tracking
In this case, a straight line reference trajectory is considered. The equation of the straight line reference trajectory is given as
First, we assume that the wheels' sliding described by [iL, iR,δ]=[0.15,-0.15,0.1sin(0.2t)] only in fluences the mobile robot after t = 8. The controller and sliding model observer gains are chosen as L1 = |ẋ sin θ|, L2 = 0.3, L3 =4r/bωL and L4 =4r/bωR. The parameters of the low pass filter are chosen as γ1 = 30, γ2 = 20 and γ3 = 50. The tracking and obstacle avoidance results of the proposed control system are shown in Fig.5. Fig. 5a reveals that the proposed adaptive control system can overcome the effect of sliding while obstacle avoidance is guaranteed. Tracking errors of the proposed control system are shown in Figs. 5b∼5d, we can observe in Figs. 5b∼5d that the tracking errors converge asymptotically to zero except in the range that the mobile robot detects the obstacle because the sliding effect is considered. In addition, the distance between the robot and obstacle is shown in Fig. 5e. In this figure, notice that this distance is always larger than the avoidance radius l = 2m, namely there is no collision between the robot and the obstacle. Meanwhile, it can be seen from Fig.5 f∼h, the siding parameters can be estimated precisely by the SMO.

simulation results for a straight line reference trajectory in the presence of wheel's sliding
From Fig.5, we can see that the proposed control method can effectively overcome the wheels' sliding for the straight line trajectory tracking and obstacle avoidance of mobile robots.
5.2 The curved line reference trajectory tracking
In this case, we consider a curved line reference trajectory generated by reference velocities vr = 2m/s and ωr = 0.2rad/s for 0 ≤ t ≤ 40. The equation of the straight line reference trajectory is given as:
In addition, it is assumed that the obstacle is located at (Xo, Yo) = (-7,-0.5). The initial positions of the reference trajectory and the actual mobile robot are chosen as
The wheels' sliding is described by:
[iL,iR,δ] = [0.15,-0.15, 0.6cos(0.2t)] and influences the mobile robot after t = 15.
To simplify the complexity of the simulation, the control system parameters, control parameters and the parameters of the low pass filter are all the same as in the previous simulation.

Simulation results for a curved line reference trajectory in the presence of the wheels' sliding
The simulation results are shown in Fig. 6, where the proposed adaptive control system can compensate for the sliding effects and has good performance in obstacle avoidance (see Fig. 6a∼d). In addition, Fig. 6e reveals that there is no collision between the robot and the obstacles. Fig.6 f∼h show the three sliding parameters can be estimated accurately in real time by the SMO.
From Fig.6, we draw a conclusion that the proposed control approach has good tracking and obstacle avoidance performance for the curved path regardless of the effects of the unknown sliding.
Further, from Fig.5 and Fig.6, we discover that the proposed control method can avoid obstacles and overcome effectively the sliding influence for the given path tracking of mobile robots. This is mainly because the designed tracking control laws (equations (37) and (38)) have adaptive abilities and whose sliding parameters are adaptively modifying. What's more, when a robot's sliding parameters change, the tracking controller can automatically adjust these parameters to meet the demands of the mobile robot in the real environment by the sliding model observer. Even if the system sliding parameters iL, iR and δ change abruptly, the sliding model observer can still estimate sliding parameters rather accurately. Consequently, the adaptive tracking control algorithm has good robustness and the adaptive ability to face sliding parameter perturbations of the mobile robot.
6. Conclusions
We have presented an approach to design an adaptive controller for the tracking and obstacle avoidance of mobile robots in the presence of the wheels' unknown sliding at the kinematic level. The robot kinematic model has been induced from the model in the absence of sliding. A novel adaptive control system for mobile robots has been designed using the Lypunov design technique. Meanwhile, a sliding model observer is used to estimate sliding parameters online. We have proved its stability and have induced the control laws to compensate for unknown sliding from Lyapunov stability approach with the potential function. Finally, simulation results have shown the proposed controller has good tracking and obstacle avoidance performance and robustness against the unknown wheel sliding.
Footnotes
7. Acknowledgments
This work is supported in part by the Chongqing Natural Science Foundation (No. CSTC2012JJB40002), the Chongqing Science and Technology Grant funded by the Chongqing Government (No. CSTC, 2011AB2052) and the National High Technology Research and Development Program of China (No. 2006AA04A124).