
Abstract
For mobile robots moving in a plane, the mean square consensus problem is investigated under Markovian communication of partly known transition probabilities. Based on linear matrix inequalities, bisection search and numerical optimization, a design method is presented of feedback gains guaranteeing mean square consensus.
1. Introduction
The consensus problem of mobile robots (or multi-agents) by information exchange is very important in engineering, and therefore, over the past few decades, it has attracted much research attention. In [1,2], Olfati-Saber and Murray introduced theoretical framework for solving the consensus problem. In [3,4], the consensus problems of the first-order integrator system with communication of undirected switching topology were proposed. In [5], for the single integrator system with communication of directed switching topology, it has been demonstrated that consensus is reached when the graph has the spanning tree. Hatano and Mesbahi [6] proposed the agreement problem above the random information exchange network. In [7], Porfiri and Stilwell provided sufficient conditions for reaching consensus almost certainly in the case of a linear system where the communication flow is given by a directed graph derived from a random graph process. Under a similar model of communication topology, Zhang [8] presented the necessary and sufficient conditions of the mean square consensus of double-integrator agents with stochastic switching communication topology.
For systems whose dynamics change in various possible scenarios, the Markovian jump system is an effective description. Recently, some interesting results with regard to Markovian jump systems have been presented on uncertain transition probabilities [10–12]. Noticing that the Markov chain can be used to describe the stochastic switching of communication among mobile robots, this paper addresses the mean square consensus problem of mobile robots under the Markovian communication of partly known transition probabilities. An sufficient condition of this problem is provided and the corresponding design algorithm is given.
In this paper, ℤ+ is used to denote the set of all nonnegative integers. The n×n real identity matrix is denoted by In. The Euclidean norm is denoted by ‖•‖. If a matrix P is positive (negative) definite, it is denoted by P>0(<0). The Kronecker product is represented by ⊗ and the expected value is represented by E[•].
The remainder of the paper is organized as follows. Section 2 describes a mobile robot system and its consensus problem. The condition and algorithm for the mean square consensus problem is derived in Section 3. Section 4 provides the numerical simulation results and Section 5 draws conclusions.
2. Mobile robots system and its consensus problem
Consider n mobile robots moving in a plane. At time t ∈[0, ∞), the state of the ith (i ∈{1,…,n}) robot is

where (pxi(t),pyi (t)) and (pxi(t),ṗi (t)) represent position and velocity, respectively. Accordingly, the dynamics of the ith robot is modelled as

where accelerati on (p̈xi(t), p̈i (t)) acts as the control input uci(t). Suppose that these mobile robots are controlled in the sampled-data system framework [16] of zero-order holders and a given sampling period h>0. Thus, the discrete time model of the ith robot is obtained as

with

The communication situation among these n robots is described by matrix

where dij(k) ∈ (0,1} : dij(k) = 1 means that zj(k) is known by the ith robot at kh, while dij (k) = 0 means that zj(k) is unknown by the ith robot at kh. Given m constant matrix D1,…,Dm ∈ ℝn×n. The entries of these matrices take value from {0,1}. It is assumed that D(k) randomly varies in {D1,…,Dm} as k increases, i.e., D(k) can be expressed as D
rk
with a stochastic process rk whose state space is {1,…,m}. In this paper, rk is typically assumed to be a discrete time homogeneous Markovian chain of partly known transition probabilities. That is to say, some entries are inaccessible for the transition probabilities matrix Γ = (γls) ∈ ℝm×m with γls = Pr(rk+1=s|rk = l). For example, when m=4, Γ may be
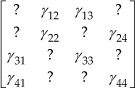
where ‘?’ represents the inaccessible entries. For l = {1,…,m}, define

The task of these n mobile robots is to go to a prescribed target point (p*x,p*y). Among the n robots, only the 1st robot knows (px,py). As the leading robot, the 1st robot adopts the following control law

with z* = [px* 0 py* 0]T ∈ ℝ4 and the feedback gain matrix

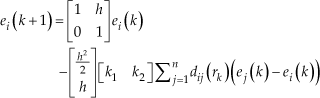
The other robots unaware of (px*, py*) have to utilize a control law without z*

The mobile robots system is said to reach mean square consensus if
3. Main result
3.1 A Sufficient Condition of Mean Square Consensus
For the mobile robot system, from (2), (4), (5) and (6), we can easily see that its discrete time dynamics and control in x-direction are the same as that in the y-direction. Therefore an investigation in x-direction is enough. For i ∈ {1,…,n}, denote

From (2), (4) and (7), we can obtain

From (2), (6) and (7), we can obtain ∀i ∈ {2,…,n}
Now, consider all the n robots together. Define

A combination of (8), (9) and (10) leads to

where
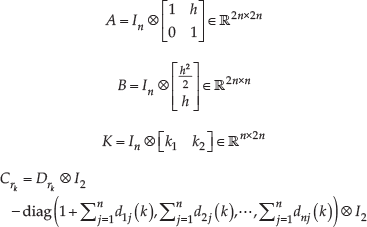
It is noticed that Crk driven by rk varies in the set {C1,…,Cm} which consists of m constant matrices. For any l ∈ {1,…,m}, Cl ∈ ℝ2n×2n can be calculated from Dl.
Theorem 1: The robot system described in (2), (4), (5) and (6) reaches mean square consensus under the feedback gains k1 and k2 if m positive definite matrices P1,…,Pm ∈ ℝ2n×2n and a real number β ≥ 1 exist such that ∀l ∈ {1,…,m},


Proof: Conditions (12) and (13) imply ∀l ∈ {1,…,m),

and hence
Consider the stochastic Lyapunov function

Then ∀rk = l ∈ {1,…,m}, we have
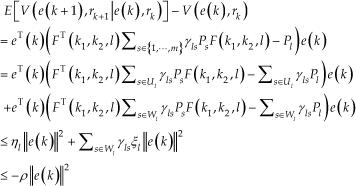
where

Therefore,
which means

Since the y-direction model is the same as the x-direction model, the motion in y-direction is also convergent. Thus we conclude

3.2 Design Method
Given a pair (k1,k2), let the conditions in Theorem 1

be represented by L(k1,k2,β) < 0. Obviously, when β is fixed, L(k1, k2, β) < 0 is a linear matrix inequality (LMI) which can be solved efficiently. For any a pair of (k1, k2), define
Based on the LMI technique and bisection search, we provide a calculation method of
Step a) Set a precision ε > 0, a sufficiently large βmax such that L(k1, k2, βmax) < 0 has no solution and a sufficiently small βmin > 0 such that L(k1, k2, βmin) < 0 has solutions.
Step b) Let βtemp = (βmin + βmax)/2, solve L(k1, k2, βtemp) < 0.
Step c) If L(k1, k2, βtemp) < 0. has solutions, βmin = βtemp; if L(k1, k2,β) < 0 has no solution, βmax = βtemp.
Step d) If βmax – βmin < ε,
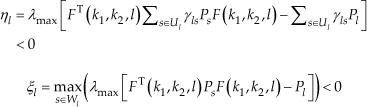
From Theorem 1, it is known that those (k1,k2) s whose
Problem (14) is an unconstrained nonlinear optimization problem of only two variables. It is solved in this paper by the following method. At first, in the k1−k2 plane, the designer gives a rectangle

containing (N + 1)2 points. Then, calculate

Finally, with (k1*,k2*) as the initial guess, solve (14) using the BFGS Quasi-Newton algorithm [19] and acquire the optimal solution (k1opt,k2opt).
4. A numerical example
In the numerical example, n=6, h=0.1s, m=4,

Figure 1 illustrates the four communication situations corresponding to D1 ∼ D4. An arrow from the ith to the jth one in Figure 1 represents dij = 1. The partly unknown transition probabilities of rk are
Four communication situations
Using the calculation steps in Section 3, Contour lines of 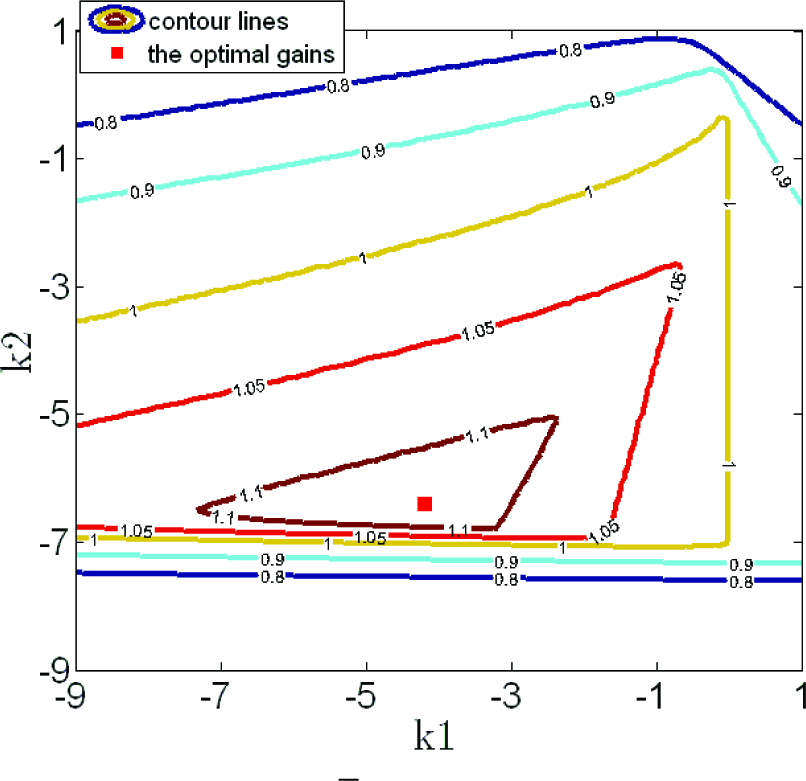

which is also displayed in Figure 2. With target (p* x , p* y ) = (183,152) and initial states selected randomly, the motion of six robots is simulated under transition probabilities respectively. Figure 3 and Figure 4 show the motion. It can be seen that these robots move to the target point under either Γ1 or Γ2.

Motion of six robots under Γ1

Motion of six robots under Γ2

5. Conclusion
The consensus problem of a mobile robot system has been studied under a Markovian switching communication topology of partly known transition probabilities. The control input of each robot depends on the information exchange among robots. A stochastic Lyapunov function has been employed to investigate the mean square consensus of mobile robots, and the controller design problem has been solved by using numerical optimization techniques.
Footnotes
6. Acknowledgments
This work was supported by the 973 programme of China (grant 2009CB320603).