This article deals with the leader-following mean-square consensus problem of discrete-time general linear multi-agent systems with Markovian switching topologies and persistent disturbances. Assume that the communication topology is not connected at any time but the union topology is connected. First, the estimators are designed to calculate the states of agents when external disturbance not exists. Based on the error information between the truth-values and estimated-values of states, the compensators are proposed to subject to the effect of persistent disturbances. And then, a new mean-square consensus control protocol is proposed for each agent. Second, by using the property of permutation matrix, the original closed-loop system is transferred into an equivalent system. Third, sufficient conditions for mean-square consensus are obtained in the form of matrix inequalities. Finally, numerical simulations are given to illustrate the effectiveness of the theoretical results.
Recently, the distributed coordination control problems of the multi-agent systems have attracted intensive attention from different fields’ scholars. As we know, the consensus problem is the essential problem in the distributed coordination control field. A lot of results were reported. For example, in Viesek,1 the model was proposed from statistical mechanics. And then, Ren and Beard2 proved that the multi-agent systems with directed topologies can achieve consensus if the union of the graphs have a spanning tree. For the discrete-time systems, Xiao et al.3 solved the consensus problem of a single-leader multi-followers system. In Lin and Jia4 second-order discrete-time agents with nonuniform time-delays were investigated. Then, the output consensus problem was studied for a class of uncertain linear multi-agent systems.5 More recently, the constrained consensus problems were proposed and some interesting results were obtained.6,7
In the practical engineering applications, the systems often suffer the external disturbances. Using the theory of stochastic stability, Li and Zhang8 investigated the mean-square consensus problem of leader-following systems with measurement disturbance, and then, these results were extended to the general linear time-invariant systems.9 Meanwhile, using the method of robust control, the consensus problem for multi-agent systems with first-order, second-order, and high-order integrators was investigated in Jia and colleagues.10–12
In applications, whether the information exchanges or not between agents is also stochastic, the Markovian switching model was used to deal with this situation. Zhang and Tian13 proved that the switching systems can realize mean-square consensus when the union of graphs has a globally reachable node. In Matei and John,14 the consensus in almost sure sense can be achieved if and only if the union of graphs is strongly connected for both continuous-time and discrete-time systems. Cheng et al.15 studied the mean square and almost sure consensus problem of discrete-time linear multi-agent systems with communication noises and Markovian switching topologies. Then, the distributed output feedback algorithm and containment algorithm were proposed for the Markovian switching multi-agent systems.16,17
In the process of military confrontation, powerful jamming signals beamed from enemy missiles. So, researching on how to design control protocols for multi-agent systems with persistent disturbances has great significance. For the leader-following system with unknown external persistent disturbance and connected topology, the leader-following consensus problems were also solved based on the estimated information of states and disturbance.18,19
By studying recent literatures, we found that both the topological structure and the persistent disturbance might destroy the stability of multi-agent systems. Therefore, it is meaningful to investigate the consensus problem when the topology switches stochastically and the system is upset by the persistent disturbances. However, to the best of our knowledge, there are not many results on combining both difficulties. And this problem cannot be solved directly by the previous methods.18,19 In this article, we focus on discussing this problem. Different with the methods on robust consensus,10–12 the observer technique was employed to estimate the external disturbances. A new control protocol was proposed to drive the multi-agent system with persistent disturbances to achieve mean-square consensus when the topology switches stochastically among some unconnected graphs, and the switch is driven by an ergodic Markovian chain.
Notations
Throughout this article, represents the set of dimensions vector and represents the set of real dimensions matrix. Let indicates a dimensions identity matrix and denotes zero matrix with appropriate dimension. represents product, denotes the eigenvalue of matrix , represents the real part of eigenvalue, denotes matrix norm and represents the spectral radius.
Preliminaries
A graph G = (V, E, A) consists of node set , edge set and an adjacency matrix . In graph , means that agent is the neighbor of agent and represents the set of all neighbors of agent . Adjacency matrix denotes the connected relationship between nodes, where the elements in matrix is 0 or 1. If , then , otherwise . The Laplacian matrix , where . For undirected graph, Laplacian matrix is a symmetric matrix. If is connected, then , where are the eigenvalues of . For the leader-following systems, we define a diagonal matrix , where , if the leader is a neighbor of agent , otherwise, . We use graph to represent the leader-following system, which consists of following agents and one leader agent. And symmetric matrix associated with is defined as .
In this article, we consider the multi-agent systems with stochastically switching topologies provided that the union of topologies has a globally reachable node. The switch is governed by a Markovian chain , whose state space . The transition probability matrix is denoted by , and its element . If the Markovian chain is ergodic, then it has the stationary distribution, denoted by , which means . Accordingly, Markovian switching topology evolves in the set , union graph is defined as , symmetric matrix evolves in the set , and the symmetric matrix associated with union graph is defined as .
Lemma 1
Let be the matrices with appropriate dimensions and product has the following properties20
Lemma 2 (Schur complement)
For block symmetric matrices , the following three conditions are equivalent:10
Lemma 3
If graph is connected and undirected, the symmetric matrix is positive definite. And all the eigenvalues of are positive.21
Lemma 4
Let are the matrices with appropriate dimensions, and , then for any , we have .22
Lemma 5
If all eigenvalues of have negative real parts, then the eigenvalues of have negative real parts as well.15
System model
Consider a multi-agent system consisting of agents. Assume that the dynamic equation of following agent is as follows
where and represent state and control input of agent , respectively; represents persistent disturbances; and are constant matrices.
Assume the dynamic equation of leader is as follows
where represents the state of the leader.
The state estimation of agent is denoted by
where is a coefficient matrix.
The estimation of is denoted as , and its dynamic equation is as follows
where is also a coefficient matrix to be determined in the following.
We adopt the following control protocol in this article, which consists of two parts, one part is based on the traditional control input and the other part is the estimation of disturbances
where is the control gain.
Using control protocol (5), we can get the following closed-loop system
Definition 1
We say the control protocol (5) can solve the leader-following mean-square consensus problem of system (1) with (2) if the following equations hold
The purpose of this article is to study the mean-square leader-following consensus condition for multi-agent systems with persistent disturbances and the Markovian switching topologies.
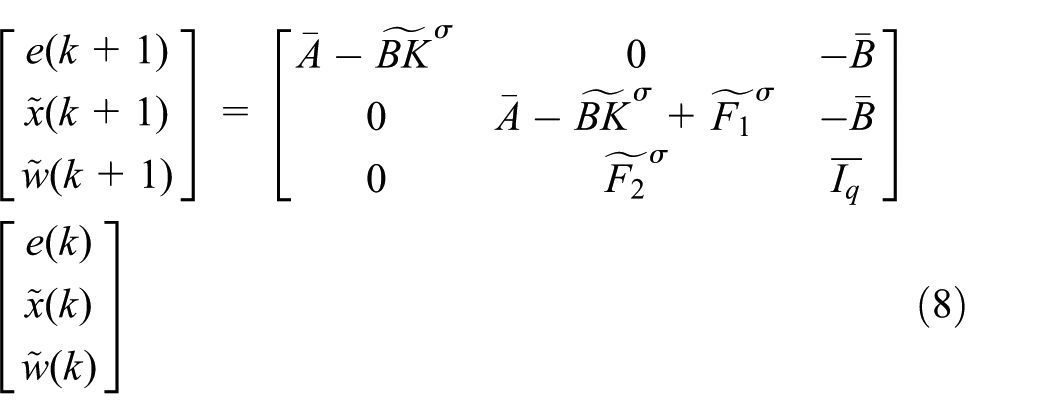
Then, the above three equations can be written in the following matrix form
where , , , , , and , and the switching signal is a Markovian chain.
Then, the leader-following mean-square consensus problem of systems (1) and (2) is converted to the mean-square stability problem of system (8). For undirected and connected graph , are symmetric matrices, and there exists a set of orthogonal matrices , such as , where are the eigenvalues of matrix . According to Lemma 3, it is easy to see that .
Let , then system (8) can be changed into the following form
where , , , and .
Denote , equation (9) will be reduced to the following form
where coefficient matrix .
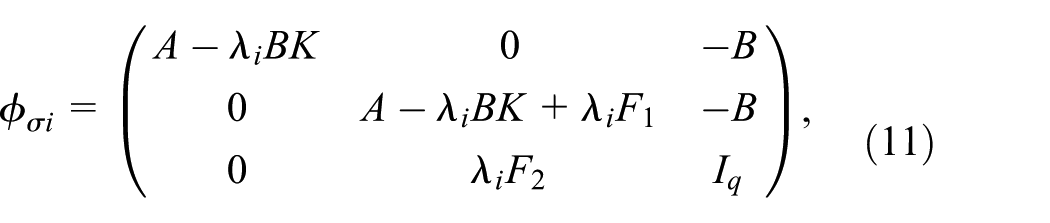
Note that the eigenvalues of the matrix are not changed by exchanging the row and corresponding column simultaneously. Using permutation transformation, can be changed into the block diagonal form as , where
Without loss of generality, we only need to consider the stability of the ith block matrix. Denote the ith block as and the system equation of the ith block is
To continue, we need the following lemma.
Lemma 6
Suppose that is connected for some . If there exists a positive-definite symmetric matrix and , such that the following matrix inequalities hold
take , , where , , , , is large enough, and is small enough. Then, .
Proof
First, let us discuss the spectral radius of the matrix (11). Note the form of equation (11), we only need to discuss the spectral radius of the block matrices and .
By taking with . For the block matrix , we have
From condition (13), it is easy to see that
According to the Lyapunov stability theorem, the above inequality is equivalent to .
For the second block matrix, we have
By taking , then
where , , and .
For the block matrix , by Lemma 4, there exists such that
Similarly, for the block matrix , there exists such that
And, for the block matrix , there exists such that
From the above inequalities (14)–(16), we have
where .
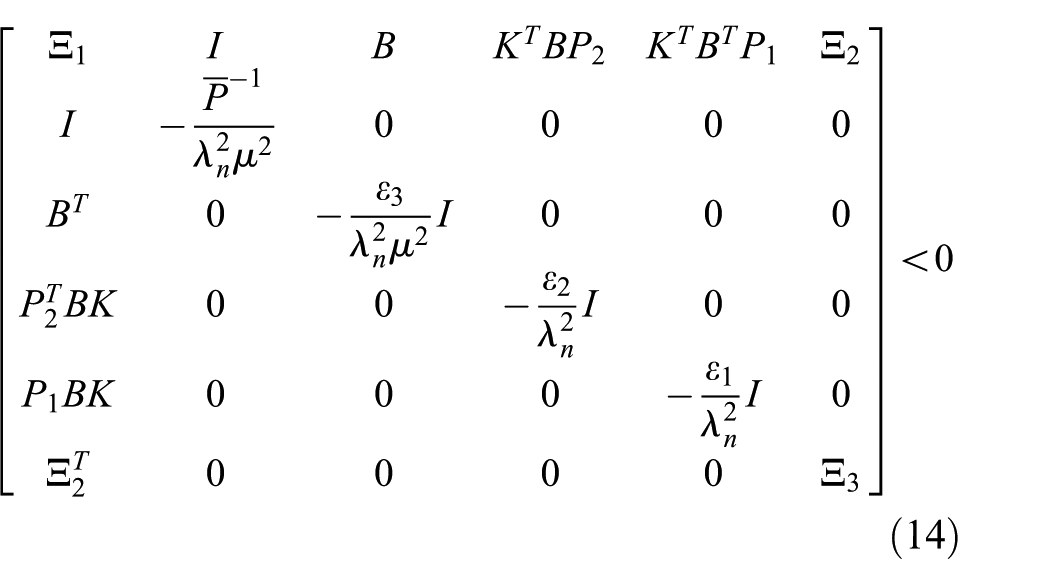
According to Lemma 2, inequality (14) is equivalent to
It is easy to see that inequality (19) is equivalent to matrix , which implies that
Therefore, the eigenvalues of matrix are within the unit circle. In summary, . For the block diagonal matrix with , we know .
Remark 1
When (A, B) is controllable, we can find a matrix such that , and then, we can find a positive-definite matrix such that inequality (13) holds. Let , for any , it is clear that there exist three positive scalars such that inequalities (15), (16), and (17) hold from Lemma 4. We can also find that matrix guarantees matrix is positive definite. Then, by selecting a large enough scalar and a small enough scalar , inequalities (13) and (14) are relatively easy to realize.
Next, let us state our main result of this article; here, we suppose that each topology does not connected, but the union of topologies has a globally reachable node.
Theorem 1
Consider system (1) with (2). Suppose that the Markovian chain is ergodic and union graph has a globally reachable node. If there exists a positive-definite symmetric matrix and positive scalars , such that
and take and , where are the eigenvalue of the union matrix , , , , , is large enough, and is small enough. Then, the leader-following mean-square consensus problem can be solved by protocol (5).
Proof
Since is an ergodic Markovian chain and is a union graph which has a globally reachable node, the eigenvalues of the symmetric are all positive. According to Lemma 6, we can obtain . By the property of ergodic Markovian chain, we have that , where and . So, we also have . Denote , where is a small enough positive number, and then, it is easy to see that .
According to Theorem 3.9 of Costa et al.,23 if , system (12) is a mean-square stability.
For , denote , and then, we have
For small enough , the last term can be treated as a perturbation term, which can be neglected compared with the first two terms; thus, we only need to discuss the matrix
It is easy to see that with algebraic multiplicity , and its eigenvector is , where is a -component vector. Denote is an eigenvalue of matrix , and is defined by ; we can see that is a eigenvalue of matrix and its eigenvector is , .
Multiplying by , the ith block matrix is
Thus, for all , we can obtain that
Summing up the above formula from to , we have
For small enough , depends on ; according to Lemma 5, the eigenvalues of matrix have negative real parts as the same as matrix , thus . Then, , which implies that .
System (1) with (2) under Markovian switching topologies with a globally reachable node can achieve the mean-square consensus. It means that , which implies that the estimation error of states and the tracking error converge to zero in the sense of mean square, that is
Remark 2
In fact, the condition that the union topology has a globally reachable node is also a necessary condition for achieving mean-square consensus. Denote , we can get . Then, for any topology , the corresponding matrix has at least one zero eigenvalue, and by exchanging the row and corresponding column of simultaneously, we can get that is similar to , where , and it is obvious that has q unit eigenvalues. For all , has at least q unit eigenvalues, and thus, , which is contrary to mean-square consensus.
Remark 3
In Li and Zhang,8 by the sampling technique, the continuous-time system is transformed into an equivalent discrete-time system, and the mean-square average consensus of the system with measurement noises is obtained. While Li and Zhang8 do not consider the Markovian switching topologies. In practical systems, communication topologies are always switching. Thus, the problem considered herein has a wider scope of application.
Remark 4
Li et al.24 consider the containment control of leader-following multi-agent systems with Markovian switching network, and there are multiple leaders in the system model. This article considers the mean-square consensus problem of discrete-time multi-agent systems with a leader and persistent disturbances under Markovian switching topologies; the order of each agent’s dynamics in Li et al.24 is one, and this article considers the general linear multi-agent systems. Liu and Jia25 used the approach to study the consensus problem of high-order multi-agent systems with external disturbances, and the protocol in Liu and Jia25 does not have the estimation of disturbance. Li and colleagues24,26 consider the case with multiple leaders, and we will extend our results to the case with multiple leaders in our following work.
Remark 5
In Cheng et al.,15 noises are inevitable in real communication environments, while in applications, persistent noise might occur along with the input signal. In this article, the effect of persistent disturbance on closed-loop systems is considered, and the analysis method here is totally different with the one in Cheng et al.15 In the future, we will study the consensus problem when communication noise and persistent disturbance exist simultaneously.
Numerical simulations
In this section, we give the numerical simulation to check the effectiveness of the above results. Suppose . Assume that there are four followers and one leader. Assume that topological structures switch between the following three topologies, as shown in Figure 1, and the persistent disturbances for all .
Jointly connected topological structures between agents.
It is obvious that these graphs are not connected, but the union topology has a globally reachable node. The errors of tracking and state estimations are shown in Figures 2 and 3, respectively, which show that the multi-agent systems can achieve consensus.
The state errors.
The state estimations.
Conclusion
In this article, we investigate the leader-following mean-square consensus problem of discrete-time multi-agent systems with Markovian switching topologies and persistent disturbances. A mean-square consensus control protocol consisting of estimators and compensators is proposed to subject to the effect of the persistent disturbances and the stochastic switches. Using the permutation matrix, sufficient conditions for mean-square consensus are obtained in the form of matrix inequalities. We will extend our results to the case with multiple leaders in our following work.
Footnotes
Academic Editor: Juan Cano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation (NNSF) of China (Grant No. 61304155) and the Beijing Municipal Government Foundation for Talents (Grant No. 2012D005003000005).
References
1.
ViesekT. Novel type of phase transition in a system of self-driven particles. Phys Rev Lett1995; 75: 1226–1229.
2.
RenWBeardR. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE T Automat Contr2005; 50: 655–661.
3.
XiaoFWangLWangA. Consensus problems in discrete-time multiagent systems with fixed topology. J Math Anal Appl2006; 322: 587–598.
4.
LinPJiaY. Consensus of second-order discrete-time multi-agent systems with nonuniform time-delays and dynamically changing topologies. Automatica2009; 45: 2154–2158.
5.
KimHShimHJinH. Output consensus of heterogeneous uncertain linear multi-agent systems. IEEE T Automat Contr2011; 56(1): 200–206.
6.
LinPRenW. Constrained consensus in unbalanced networks with communication delays. IEEE T Automat Contr2014; 59(3): 775–781.
7.
LinPRenWSongY. Distributed multi-agent optimization subject to nonidentical constraints and communication delays. Automatica2016; 65: 120–131.
8.
LiTZhangJ. Sampled-data based average consensus control for networks of continuous-time integrator agents with measurement noises. In: Proceedings of the 26th Chinese control conference, Hunan, China, 26–31 June 2007, pp.716–720. New York: IEEE.
9.
LiTZhangJ. Sampled-data based average consensus with measurement noises: convergence analysis and uncertainty principle. Sci China Ser F2009; 52: 2089–2103.
10.
LinPJiaYLiL. Distributed robust H∞ consensus control in directed networks of agents with time-delay. Syst Control Lett2008; 57: 643–653.
11.
LinPRenW.Distributed H∞ constrained consensus problem. Syst Control Lett2017; 104: 45–48.
12.
MoLJiaY. H∞ consensus of a class of high-order multi-agent systems with time-delay. IET Control Theory and Applications2011; 5: 247–253.
13.
ZhangYTianY. Consentability and protocol design of multi-agent systems with stochastic switching topology. Automatica2009; 45: 1195–1201.
14.
LinPRenWGaoH.Distributed velocity-constrained consensus of discrete-time multi-agent systems with nonconvex constraints, switching topologies, and delays. IEEE T Automat Contr2017. DOI: 10.1109/TAC.2016.2637005.
15.
ChengLWangYHouZ. Stochastic consensus of linear multi-agent systems: communication noises and Markovian switching topologies. In: Proceedings of the 26th China conference on control and decision, Changsha, China, 31 May–2 June 2014, pp.274–279. New York: IEEE.
16.
ZhaoHRenWYuanDet al. Distributed discrete-time coordinated tracking with Markovian switching topologies. Syst Control Lett2012; 61: 766–772.
17.
WangBZhangJ. Distributed output feedback control of Markov jump multi-agent systems. Automatica2013; 49: 1397–1402.
18.
TanselYMagnusE. Control of multiagent systems under persistent disturbances. In: Proceedings of the American control conference, Montreal, QC, Canada, 27–29 June 2012, pp.5264–5269. New York: IEEE.
19.
CaoWZhangJRenW. Leader–follower consensus of linear multi-agent systems with unknown external disturbances. Syst Control Lett2015; 82: 64–70.
LinPRenWFarrellJA.Distributed continuous-time optimization: nonuniform gradient gains, finite-time convergence, and convex constraint set. IEEE T Automat Contr2017; 62: 2239–2253.
22.
PetersenIR. A stabilization algorithm for a class of uncertain linear systems. Syst Control Lett1987; 8: 351–357.
23.
CostaOFragosoMMarquesR. Discrete-time Markov jump linear systems. London: Springer-Verlag, 2005.
24.
LiWXieLZhangJF. Containment control of leader-following multi-agent systems with Markovian switching network topologies and measurement noises. Automatica2015; 51: 263–267.
25.
LiuYJiaY. Consensus problem of high-order multi-agent systems with external disturbances: an H∞, analysis approach. Int J Robust Nonlin2010; 20: 1579–1593.