
Abstract
Individuals with Spinal Cord Injury (SCI), perform Sitting Pivot Transfer (SPT) motion around fifteen times a day using upper extremities. It can lead to upper limbs pain and often shoulder complications. In this paper, we investigate the influence of Functional Electrical Stimulation (FES) on SPT motion of a paraplegic person. First, we proposed to develop a dynamic optimization method in order to predict SPT motion of an able-bodied subject. This approach has been validated by comparing the computed SPT trajectories with the ones measured during the experiment with an able-bodied subject. Then, we used the optimization tool to analyze the influence of FES on the SPT maneuver of paraplegic persons. Our results suggest that FES can decrease arm participation during the transfer motion of a paraplegic person.
1. Introduction
Among all transfer activities, SPT is reported to be one of the most commonly used by individuals with SCI Bromley (1998). The performance of SPT may rank among the most demanding functional mobility activities for the upper limbs Gagnon, Nadeau, Desjardins & Noreau (2008). Transferring from a wheelchair to a treatment table, bed, tub/shower bench, toilet seat, car seat and vice versa represents typical SPT performed by individuals with SCI. When initiating SPT, paraplegic individuals move their wheelchair as close as possible to the target seat. They move the buttocks forward close to the front edge of the wheelchair seat and, with the help of their arms, place firmly their feet on the floor. Then, they place one hand, called the trailing hand, on a stable position on the wheelchair and the other hand, known as the leading hand, on the target surface far enough to leave sufficient space for the buttocks. From this starting position, subjects bend their trunk forward and sideways, meanwhile they lift up their body and sustain their weight with the arms. After that, with a very rapid twisting motion they place the buttocks on the target seat. The transfer is concluded when the subjects reach again a seated postural stability. The performance of SPT varies from one person to the other depending on the subject's features, like lower limb spasticity, and environmental factors, like wheelchair design Gagnon, Nadeau, Noreau, Eng & Gravel (2008); Koontz, Kankipati, Lin, Cooper & Boninger (2011). SCI persons perform around fifteen SPT motions a day Gagnon, Nadeau, Noreau, Dehail & Gravel (2008); Gagnon, Nadeau, Noreau, Eng & Gravel (2008).
Usually SPT is divided into three distinct phases:
Pre-lift is the preparatory phase that ends when the trunk bends forward,
Lift is the phase when most of the body weight is supported by the upper limbs,
Post-lift is the rebalancing phase, when the subject is sitting on the new seat.
The lift phase lasts forty percent of the entire transfer duration Gagnon, Nadeau, Noreau, Eng& Gravel (2008). A lot of scientific works have been focused on experimental studies in which the kinetics and the kinematics of the SPT motion has been analyzed Gagnon, Nadeau, Desjardins &Noreau (2008); Gagnon, Nadeau, Noreau, Dehail & Gravel (2008); Koontz, Kankipati, Tsai & Lin (2011); Koontz, Kankipati, Lin, Cooper & Boninger (2011); Koontz, Lin, Kankipati, Boninger & Cooper (2011); Tanimoto et al. (2008); van Drongelen et al. (2011). Though Functional Electrical Stimulation enables restoration of the motion in paralyzed limbs Popovic & Sinkjær (2000), to the best of our knowledge, the influence of FES on SPT motion has not been investigated yet. It has been documented that paraplegic patients have upper limbs pain and often shoulder complications Koontz, Kankipati, Lin, Cooper & Boninger (2011); van Drongelen et al. (2011). Hence, the aim of the present study is to enhance the scientific research concerning paraplegics' SPT with assistance of functional electrical stimulation using dynamic optimization approach.
In motor control and biomechanics literature, a classical assumption is that human beings perform a motion according to certain optimal criteria, i.e. motion control can be related to a problem of minimizing a biomechanical cost function. Optimization processes usually provide a better understanding of human postural and locomotor system Flash & Hogan (1985); Kuzelicki et al. (2005); Lin et al. (1999); Martin et al. (2006); Pandy et al. (1995); Rosenbaum et al. (1995); Uno et al. (1989); Yamasaki et al. (2011). In human motion science domain, the proposed optimization algorithms generally minimize the time integral of the square of a quantitative function (jerk, acceleration, torque, torque-change). For example, Flash et al. suggested that the arm reaching motion minimizes the time integral of the hand position jerk Flash & Hogan (1985). Rosenbaum et al. computed motion with the joint angle jerk as the cost function Rosenbaum et al. (1995). Uno et al improved the optimization criterion by minimizing the torque-change, i.e. minimizing the sum of the joint torque derivatives Uno et al. (1989). Optimal sit-to-stand motion for able-bodied subjects was investigated by Pandy et al. Pandy et al. (1995). Authors used a three segment 2-D model which includes eight muscle groups. Optimal neural excitation signals were computed by minimizing the muscle forces and their derivatives. Kuzelicki et al. guarantee symmetric motion using a 3-D eleven-degrees of freedom-model by minimizing the sum of torque, torque-change and the difference between left and right ground reaction forces Kuzelicki et al. (2005). Yamasaki et al. suggested that a cost function which minimizes torque change could better describe rising motion than a cost function which minimizes joint jerk Yamasaki et al. (2011). As far as we know, there is no study which deals with optimal transfer trajectories in paraplegic population.
The goal of this work is to investigate, first the ability of optimization process to predict SPT trajectories in able-bodied subjects and then, the influence of FES on arm efforts during SPT motion of a paraplegic person. Hence, SPT motion of one able-bodied subject were measured. The trajectory of Center of Mass (CoM) position estimated using experimental data were compared with the ones obtained using optimization process. Once the results were validated, the influence of FES stimulation on the corresponding motion in paraplegic subjects was investigated.
2. Method
2.1 Kinematic model
In this study, we used the biomechanical model of a human shown on Figure 1. The model consists in nineteen segments and eighteen spherical joints, i.e. fifty four Degrees of Freedom (DoF), but we set a constant value to the six DoF of the neck. Despite the existence of accurate models for the knees and shoulders Gini et al. (2007); Murray & Larochelle (1998), we consider that spherical joints are good enough to describe the whole body motion. The spherical joints are considered as three rotations around X, Z and Y axis. The joint limits are the one presented in Table 1. The kinematic and dynamic properties of this model are scaled regarding the desired height and weight using the anthropometric Winter tables Winter (2009).
Joints limits for the biomechanical model (in radian).

2.2 Dynamic modeling and balance
To study the contact forces of the hands, we start from the the dynamic model as presented:

Representation of the kinematic model and joint frames for zero joint positions.

Where q ∈ ℝ
n
is a vector containing the joint positions, Γ ∈ ℝ
n
the vector of the joint torque D1 ∈R
n
and D2 ∈R
n
the dynamics effects (sum of inertia, Coriolis, centrifugal and gravity) due to the joint trajectories, J1 ∈R
n×3Nf
and J2 ∈R
6×3Nf
the components of the Jacobian matrix and
2.3 Computation of the contact forces
Equation (1) emphasizes the link between the joint trajectories
Due to the non-planar contact points, we cannot use classical method such as the Zero Moment Point Vukobratovic & Borovac (2004) to characterize balance. In order to ensure the balance and desired torque values, the contact forces must counterpart the dynamic effects and fulfill the friction and unilateral constraint to avoid undesired sliding or taking off, such as:


with Fin and Fit are the normal and tangential components of the contact forces Fi, μ i the friction coefficient and Die and J1 T , e are the eth line of D1 and J1 T . Equations (2) and (4) refer to the balance criteria presented in Harada et al. (2007) which states that the contact wrench sum must remain in the contact wrench cone to ensure balance.
To solve Equations (2) and (3), one can use the Moore-Penrose pseudo-inverse matrix of the Jacobian matrix.
However, the pseudo-inverse matrix minimizes the instantaneous norm of the contact forces, without any effect on the friction or sliding constraint. We rather consider the contact forces that are as close as possible to the normal direction to the contact surface, i.e. that are the solution to the following problem:
Where P̂iAi∈R3×3 and ηe,i∈R3 appear in the decomposition of the Jacobian matrix JT2 and JT1. β i is a weight value to modify the repartition of the different contact forces and α i gives more importance to the tangential components regarding to the normal one for each contact forces. The solution to problem (5) counterparts the dynamics effects and produces the desired joint torque Γe while fulfilling as best as possible the friction and unilateral constraint (by setting ai >> 1). The solution of problem (5) is:

with:

with Wi = diag(βi, αi, βi, αii, βi) (we assume that the z-axis is the normal direction of the contact forces) and
2.4 Optimization process
In mathematics or computational science, optimization refers to the selection of the best element from a set of available alternatives. In our case, the optimization problem consists in minimizing a real function while ensuring some constraints, such as respecting joint limits, ensuring balance during the motion, etc. As mentioned in Introduction section, this approach was already used in the case of motion generation in the robotics field and field of human motion science Lee et al. (2005); Lengagne, Kheddar & Yoshida (2011); Mombaur et al. (2005).
In this paper, we refer to the optimization process in order to generate SPT motion for the biomechanical model as presented in Section 2. This optimal motion, described through a parameter vector X, minimizes a cost function C and ensures a set of discrete zk, and continuous inequality gi and equality hj constraints. Thus the optimal motion is the solution of:

The parameter vector

As presented in Lengagne, Kheddar & Yoshida (2011), we used a time-interval discretization based on a polynomial approximation to consider a finite set of constraints that properly represents the continuous constraints. We used the optimization software IPOPT Wächter & Biegler (2006) that is a free and effective solution with C++ interface. We consider cost function C as the weighted sum of joint torques and joint jerks, as presented:

with a=1e-2and b=1e-5. The values a and b were set heuristically as explained in Lengagne, Kheddar, Druon & Yoshida (2011).
2.5 Experimental Validation
As mentioned above, the SPT can be divided into three phases: pre-lift, lift and post-lift phases. For each phase an initial and final position can be defined:
Pre-lift phase: the subject starts sitting on the initial chair with the feet on the floor, the right hand on the handle on the right side of the initial chair and left hand on the handle on the left side of the target chair;
Lift phase: the buttocks are moved from the initial to the target chair, while the positions of the feet and hands do not change;
Post-lift phase: the subject regains a sitting posture on the target chair, position of the feet and hands unchanged.
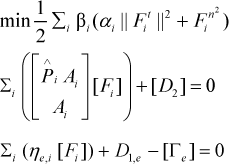
One able-bodied subject (male, age 29, height 1.75m, weight 72kg) participated in this study after signing an informed consent. The angle between the two chairs was 20 degrees. Kinematic variables were measured using a stereophotogrammetric system (8 Mx cameras, VICON©) at 100Hz sampling rate. In order to estimate accurately small postural modifications, 35 reflective markers have been located on the subject's body using Plug-In-Gait template http://www.vicon.com/ (n.d.). The experimental set-up is presented in Figure 2.
Experimental setup and initial position of the subject.
The subject was instructed to assume comfortable feet placement, to place both hands on the handles and to keep the same position of the feet and hands during the experiment. The initial position of the subject is shown in Figure 2. The subject performed the SPT at his own speed and way five times.
The Vicon Nexus© and LIFEMOD© softwares have been used to estimate CoM positions from experimental data. Each trial was time-normalized to 100 samples. Root Mean Square error (RMS) and Pearson's correlation coefficients between experimental and optimized CoM positions have been calculated in order to compare those variables.
3. Results
3.1 The ability of optimization process to predict SPT trajectories
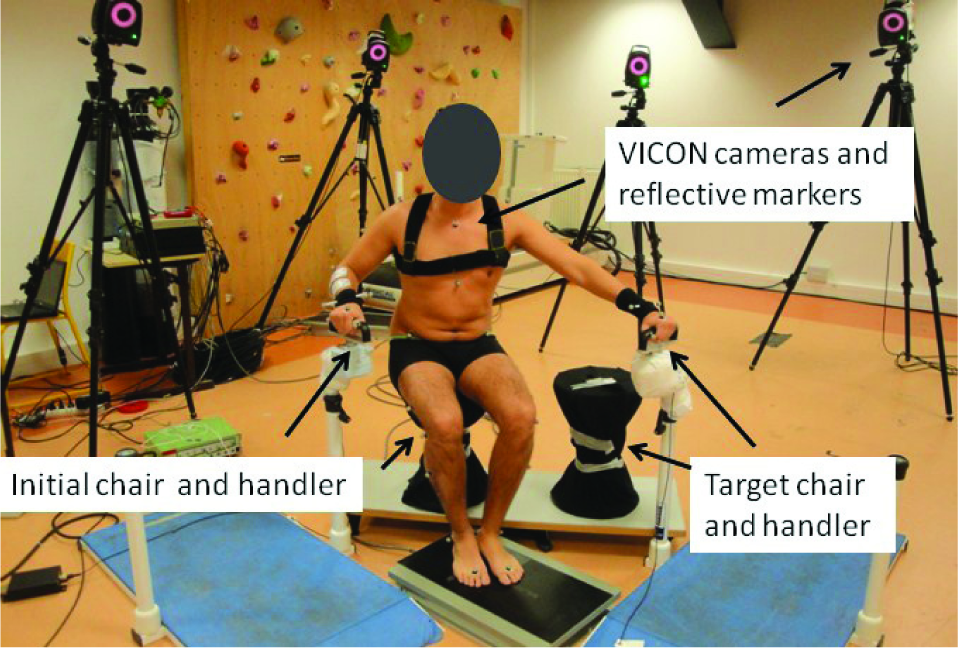
Optimal SPT trajectories were calculated using described cost function. In Fig. 3, trajectories of CoM position in Anterior-Posterior (A/P), vertical, and Medio-Lateral (M/L) directions are presented. It can be observed that differences between the optimized CoM positions and the ones calculated from measured data in anterior-posterior and vertical direction are not bigger than the variability among the different trials of the same subject. The difference between the optimized CoM position in M/L direction and the corresponding ones estimated from experimental data is slightly bigger than in the two other directions.
Computed (red line) CoM position in A/P, vertical and M/L direction in able-bodied subject. The mean CoM trajectory, in A/P, vertical and M/L direction, calculated from experimental data (black line) and gray lines marking the plus/minus standard deviation interval are shown.
Table 2 presents Root Mean Square error and Person's correlation coefficients calculated between CoM position computed using our optimization process and CoM position calculated using experimental data for all five trials. The RMS error is smaller than 10cm in A/P direction (Trial 5) and M/L direction (Trial 1). Observing Person's correlation coefficients, it can be noticed that our optimization process well reproduces the behavior of our subject in M/L and vertical direction.
RMS error and Person's correlation coefficients calculated between CoM position computed using optimization process and CoM position calculated using experimental data.

3.2 Influence of FES assistance on hand forces during SPT motion
The optimal STP trajectories are calculated for nine different scenarios (Sc). The first scenario, Sc 1, represents the behavior of an able bodied subject, allowing the variations of knee joint torque. In the other scenarios, the value of the knee joint torque is constant during the motion. In the second scenario, Sc 2, the knee torque is 0 Nm and represents the behavior of a paraplegic subject performing the motion without FES assistance. Other scenarios, from the third (Sc 3) to the ninth (Sc 9), represent a paraplegic subject performing FES-assisted SPT task while the stimulation parameters were increased. The torque values are following. Sc 3: 5 Nm, Sc 4: 10 Nm, Sc 5: 15 Nm, Sc 6: 20 Nm, Sc 7: 30 Nm, Sc 8: 40 Nm and Sc 9: 50 Nm. The virtually stimulated muscles are quadriceps and biceps femoris.
The following assumptions have been made:
for Sc 2 -Sc 9, the voluntary control of the knee joints is not possible,
the virtually stimulated bi-articular muscles produce torque control only at the knee joints,
knee joint torques do not change during the lift phase of the transfer (it has zero value during pre and post lift phase) and no stimulation leads to a null knee joint torque.
After validating our approach as presented previously, we computed the contact forces on the hands using the biomechanical model presented in Section 2, and the cost function descibed in Section 2.4. The results of the computation for the nine scenarios are presented in Figure 4. As expected, the contact forces under the hands are lower in the case of an able-bodied person (Sc 1) than in the case of a paraplegic person performing the motion without assistance of FES (Sc 2). In addition, analyzing other scenarios, it appears that the stimulation of the knee joints has an impact during the lift phase during which the contact forces of the hands decrease when the equivalent torque produced by the FES of lower limbs muscles increases.
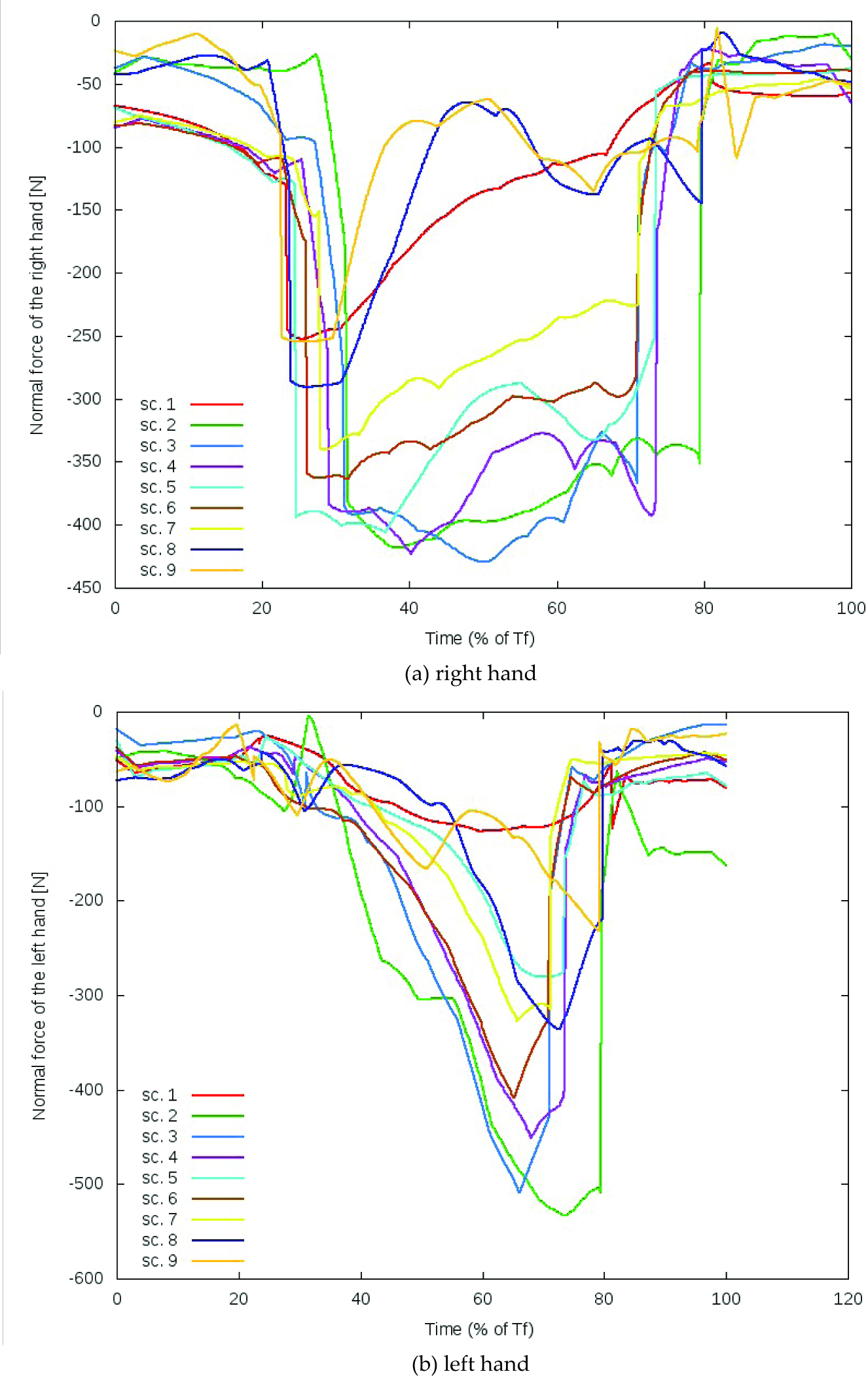
Representation of the contact forces for the several cases.
4. Conclusion
The results of this study indicate that it is possible to describe sitting pivot transfer of an able-bodied subject within the frame of optimization theory. Taking into account the body dynamics and kinetics, the proposed method was able to reproduce motion with the CoM trajectories quite closed to the one measured during experiments or estimated from the optimization process. Using it, we have shown that functional electrical stimulation applied on paralyzed lower limbs has an impact on arm efforts during the SPT motion. Our study indicates that using FES decreases arm efforts during the SPT motion. The ability to achieve those transfers with minimal participation of the upper limbs would help to preserve long-term shoulder integrity and improve the life of paraplegic patients.
Besides modeling of dynamics and kinematics of human body, Future studies will include modelling of muscle properties and finding the optimal FES pattern in order to minimize the fatigue of stimulated lower limbs muscles during SPT motion.
Footnotes
5. Acknowledgments
The authors thank the subject for participating to this study and making it possible. This work is partially supported by grants from the German Research Foundation (DFG: Deutsche Forschungsgemeinschaft).
1
for the right part of the model the values of y joint limits are opposite.