
Abstract
A new adaptive Unscented Kalman Filter (UKF) algorithm for actuator failure estimation is proposed. A novel filter method with the ability to adapt to the statistical characteristics of noise is presented to improve the estimation accuracy of traditional UKFs. A new algorithm (Kalman Filter (KF) -based adaptive UKF), with the ability to adapt to the statistical characteristic of noise, is proposed to improve the UKF's performance. Such an adaptive mechanism is intended to compensate for the lack of prior knowledge. The asymptotic property of the adaptive UKF is discussed. Actuator Healthy Coefficients (AHCs) are introduced to denote the actuator failure model while the adaptive UKF is employed for the online estimation of both the flight states and the AHCs' parameters of a rotorcraft UAV (RUAV). Simulations are conducted using the model of a ServoHeli-90 RUAV from the Shenyang Institute of Automation, CAS. The results are compared with those obtained by normal UKF to demonstrate the effectiveness and improvements of the adaptive UKF algorithm. Besides this, we also compare this algorithm with the MIT-based one which we proposed in previous research.
1. Introduction
Fault detection (FD) techniques have been widely researched in many applications to detect faults in sensors and actuators, such as in process industry [1], and with Unmanned Ground Vehicles (UGVs) [2] and fixed-wing aircraft [3]. However, few FD applications to RUAVs have been published [4]. The structure and the algorithm of the fault tolerant control can be changed to get the best possible response of the system when a fault of the system is detected.
In recent years, the encouraging achievements of sequential estimation have led to it becoming an important research direction for online modelling and model-reference control. One of the most well-known sequential estimation methods used for nonlinear systems is the extended Kalman Filter (EKF) [6]. The EKF applies the standard linear Kalman Filter to nonlinear systems by simply linearizing all of the nonlinear models.
This linearization will introduce substantial errors into the estimates of the mean and covariance of the transformed distribution, which may lead to poor performance or even the divergence of the filter. A derivative-free nonlinear Kalman filter [15] transforms the nonlinear system to a canonical form and a standard Kalman filter can be used directly. UKF is a novel estimation tool introduced by Julier and Uhlman [7]. Instead of truncating nonlinear dynamics for nonlinear estimation, the UKF approximates the distribution of the state with finite set points. Since the nonlinear models are used without linearization, it is much simpler to implement and more accurate results are expected. Its performance has been analytically shown to be similar to a truncated 2nd-order EKF at an equal computational complexity with the EKF of O(n3) (n is the dimension of state) [4].
However, since a UKF is within the framework of the Kalman filter, it can only achieve good performance under certain assumptions as to the system modelled. However, in practice the assumptions are usually not satisfied and the performance of the filter may be seriously degraded in relation to its theoretical performance or even diverge. This situation is then worse while faults occur or with damage. In order to avoid these problems, an adaptive mechanism may be applied in order to automatically tune the filter parameters to adapt the real statistics that are insufficiently prior knowledge.
There have been many investigations into the area of adaptive filters. Maybeck [8] used a maximum-likelihood estimator to estimate the system errors covariance matrix. Lee and Alfriend [9] modified the above methods by introducing a window scale Factor. Loebis et al. [10] presented an adaptive EKF method, which adjusts the measurement noise covariance matrix through fuzzy logic.
In recent research, we have proposed an adaptive UKF algorithm based on the MIT rule [2]. Based on the MIT rule, an adaptive algorithm is developed to update the covariance of process noise by minimizing the cost function. The updated covariance is then fed back into the normal UKF. Such an adaptive mechanism is meant to release the dependence of the UKF based on the prior knowledge of the noise environment and improve the convergence speed and estimation accuracy of the normal UKF. We found that the CPU time consumption of the MIT-based algorithm is about 4 to 5 times more than the normal UKF scheme. This may lead to the estimation performance being significantly lower than before in real time fault detection.
In this paper, a novel adaptive UKF algorithm is proposed for the actuator failure estimation of RUAVs. In order to do this, the AHCs are introduced to describe the actuators' failures, and the UKF is used to estimate both the states and the AHCs' parameters in real time. Simulations with the Shenyang Institute of Automation RUAV test-bed ServoHeli-90 model were conducted. Finally, comparisons with the normal UKF and MIT-based adaptive UKFs are discussed.
2. Fault Tolerant Control Architecture for Rotorcraft UAV
Figure 1 is the overall architecture for RUAV fault tolerant control. The white part is the conventional 3-layer UAV control architecture, which includes mission planning, path planning and robust flight control. Based on this part, we introduce the mission re-planning and path re-planning to the upper and middle level and as a reconfigurable flight control to the lower level. In this section, we propose the sensor and actuator failure detection algorithms and demonstrate their effectiveness with simulations.

Overall fault tolerant control scheme
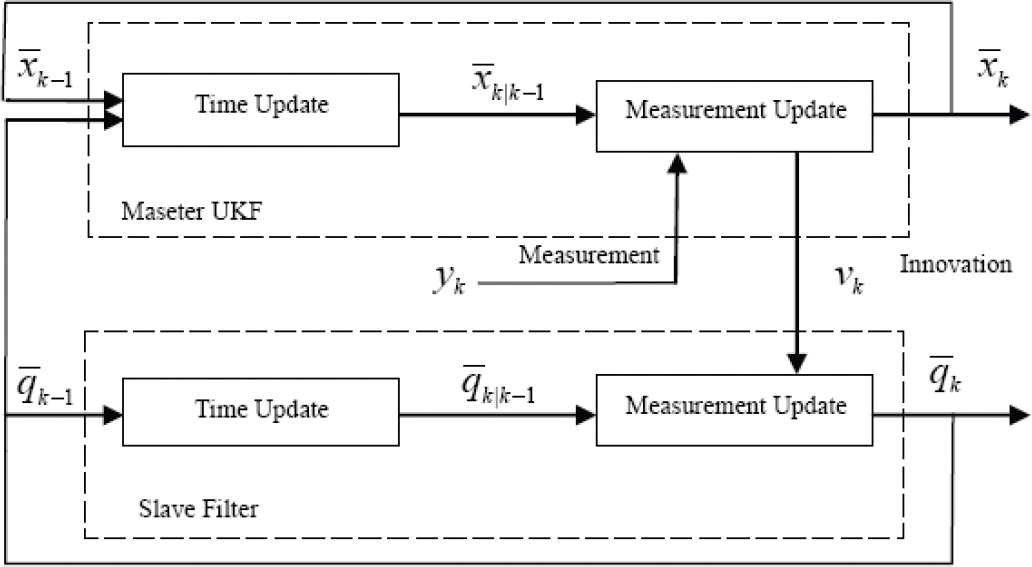
In this paper, we focus our research on actuator failure detection. Due to the inherently unstable dynamics, a flight test or the real application of a RUAV would constitute a high risk while a minimal failure may lead to the whole system collapsing. In our recent research [11], a novel adaptive unscented Kalman filter (AUKF) is proposed for the onboard failure coefficient estimation while a new fault tolerant control method is designed against the actuator failure of a RUAV. A filter method with the ability to adapt to the statistical characteristics of noise is presented to improve the estimation accuracy of a traditional UKF. The algorithm with the ability to adapt to the statistical characteristics of noise – named a Kalman Filter (KF)–based adaptive UKF (Figure 2) – is proposed to improve the UKF performance. Such an adaptive mechanism is intended to compensate the lack of any prior knowledge. By introducing the actuator health coefficients (AHCs) into the dynamics equation of a RUAV, the proposed AUKF is utilized to estimate online both the flight states and the AHCs (Figure 3). A fault adaptive control is further designed based on the estimated states and the AHCs. The comparisons between the adaptive-UKF-based fault tolerant control and the normal-UKF-based control show the effectiveness and improvements of the proposed method.
KF-based adaptive UKF

Actuator fault tolerant control scheme
3. Adaptive UKF-Based on a Kalman Filter
3.1 The Unscented Kalman Filter
The UKF works by constructing a set of points – named sigma points (shown in Figure 4) – which have the same known statistics (e.g., first and second moments, as a given measurement or state estimate). A specified nonlinear transformation can be applied to each sigma point, and the unscented estimate can be obtained by computing the statistics of the transformed set. Although this algorithm superficially resembles a Monte Carlo method, no random sampling is used and, consequently, only a small number of points are required (2n+1 for an n-dimensional space).

Unscented transform
The full UKF involves the recursive application of this “sampling” approach to the state-space equations. One of the most computationally expensive operations in the UKF is the calculation of the matrix square root of the state covariance at each time step in order to form the sigma-point set. Due to this and the need for more numerical stability (especially during the state covariance update), an improvement of the UKF—the square root UKF (SR-UKF) is developed in [4]. With the implementation of SR-UKF, the square-root of the state covariance propagates and updates directly. The following three powerful linear algebraic techniques are used: QR decomposition, Cholesky factor updating and efficient least squares.
Consider the general discrete nonlinear system:

where xk – – state vector, xk ∈ Rn
yk – – output vector, yk ∈ Rm
uk – – input vector, uk ∈ Rr
wk, vk – – the Gaussian white noise with zero mean and uncorrelated from each other
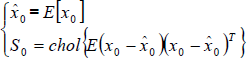
The complete specification of the SR-UKF is given below:
Initialize with:
Sigma points calculation and time update:
In the equation, the weights and the scaling parameters are:
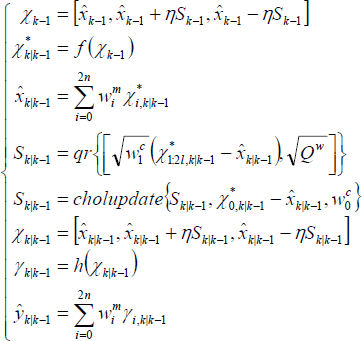
where α – – a constant determining the spread of the sigma points. β – – a parameter used to incorporate the prior knowledge of the distribution. Measurement update:
where Qw – – the disturbance noise covariance. Qv – – the sensor noise covariance.

The square-root UKF has the same (or marginally better) estimation accuracy when compared to the standard UKF, but with the added benefits of reduced computational cost, a consistently increased numerical stability and by ensuring the positive definiteness of the state covariance matrices (which was not necessarily the case with the standard UKF [12]).
3.2 Mechanism of the KF-based Adaptive UKF
The KF-based adaptive UKF is composed of two parallel maser-slave filters. The slave filter employs KF to estimate the noise covariance while the master UKF estimates the state, using the current noise covariance. If the slave filter is not added to the UKF algorithm, the master UKF will remain working well. In this way, the UKF degrades to normal UKF with fixed noise covariance. Such a master-slave filter architecture will not modify the master UKF algorithm. Moreover, when the statistical characteristics of noise are almost fixed, stopping the slave filter will make the computational load lower. The structure of filter-estimation-based adaptive UKF is shown in Figure 2.
3.3 The Slave Filter
Slave filter selection depends upon the statistical characteristics of noise. We can choose the UKF as a slave filter for the nonlinear statistical characteristics of noise and the KF for the linear one. Without loss of generality, the variety of the noise's characteristics is unknown, which we assumed to be the irrelevant random bias driven by the noise. Obviously, here we can use the KF as the slave filter. In the real system, the prior information cannot reflect the actual system state because the change of the noise's statistical characteristics results in the lower performance of the UKF. Here, we propose a slave filter in order to estimate online the statistical covariance matrix Qw. Usually, the process noise covariance Qw is a diagonal matrix. As such, the estimation of Qw can be simplified as the estimation of its diagonal elements. Here, we assume the diagonal elements of the master UKF's noise covariance matrix to be q; we can get the state equation of the slave filter as:

where wqk is the Gaussian white noise with zero mean. We can assume q as an irrelevant random vector for its unknown variety. The state equation of the slave filter changes to:

The slave filters will get different observer equations for different noise covariance matrix estimations. The slave filter's observer equation is as follows:

where vdiag(•) is a main diagonal element vector. Referring to the UKF equations, we can get Pk|k–1, Pk, K
k
and, finally, the state equation with KPk=(KkTKk)−1KkT:

where Bpk is a constant vector and HPk is a constant matrix.
If KPk ∈ ℜ
mq×nq
and:

then Qw is the diagonal matrix and thus HPk ∈ ℜ
mq×nq
and:

The measurement of the slave filter is:

where the innovation Ink is as the definition equation:

3.3 KF-based Adaptive UKF algorithm
Based on the previous analysis, the state equations and measurement equations are linear when the measurement noise variety of the master UKF is unknown. We can choose the KF – with simplified computation – as the slave filter. The full slave KF algorithm is shown as follows:


where Qqv denotes the covariance parameters of the KF's measurement noise while Qqw denotes the covariance parameters of the KF's process noise.
4. AHCs and Active Estimation
4.1 RUAV Dynamics Modelling
RUAV dynamics obey the Newton-Euler equation for rigid bodies in translational and rotational motion. Here, we consider a typical rigid RUAV in/near hovering flight and the dynamic equation is conveniently described with respect to the body coordinate system, which is written as:

By employing the lumped-parameter approach, we consider the RUAV to be the composition of the main rotor, the tail rotor, the fuselage, a horizontal stabilizer and a vertical stabilizer. These components are considered as the source of forces and moments. The external force and moment during hovering can be written as:

The forces and torques generated by the main rotor are controlled by TM, a1 and b1. The tail rotor is considered as a source of pure lateral force yT and anti-torque QT, being controlled by TT. Thus, the forces and moments can be expressed as:

where TM, TT, a1 and b1 are the main rotor torque, the tail rotor torque and the longitudinal and lateral flapping angle. We assume the four parameters are linear to the control surfaces of the actuators by omitting nonlinear characteristics.
4.2 Actuator Failure Model with AHCs
The actuator failures of the RUAV include the control surface becoming stuck, control surface bias and the partial loss in actuator effectiveness [13]. Define Uin as the inputs (servo pulse width) and Uout as the outputs (control surface) of the actuators. The fault tolerant architecture assumes the following actuator model:

where

where γi and δi are the proportional effectiveness and failure bias of ith actuator's AHCs.
4.3 States' and AHCs' Parameters' Joint Estimation
To estimate the AHCs' parameters, we use the KF-based adaptive UKF to obtain the coefficients. The parameter estimation follows a similar framework to that of the state estimation AUKF. In AUKF-based parameter estimation, the AHCs and state vectors are concatenated into a single augmented state vector:
Estimation is done recursively by writing the dynamics for the joint state as:

The AHCs' active modelling has the advantage over some existing modelling techniques insofar as only the proportional loss in effectiveness has been considered [2].
5. Simulations and Discussion
5.1 The SIA-Heli-90 RUAV Platform
The SIA-Heli-90 RUAV test-bed [14] is designed to be a common experimental platform for control and fault-tolerant related study. The hardware components are selected with considerations of weight, availability and performance.
The SIA-Heli-90 aerial vehicle is a high quality helicopter that was constructed by modifying a remote control (RC) hobby helicopter. The modified system allows for a payload of more than 5 kilograms, which is sufficient to lift the whole airborne avionic box and the communication units. The vehicle is powered by a 90-class glow plug engine. The full length of the fuselage is 1260mm and its full width is 160mm. The overall rotorcraft UAV control system is comprised of an aerial vehicle platform, an onboard avionic control system and a ground monitoring station. The UAV helicopter itself is able to operate independently of a control computer system and onboard sensors. The photograph of the implemented RUAV control system is presented in Figure 5 and the primary parameters are shown in Table 1.
Sensor Parameters


The implemented RUAV system
5.2 The Simulations of the Actuator Failures' Estimation
The proposed failure estimation scheme tested using the SIA-Heli-90 mathematical model was identified with the real flight data from the hovering experiments.
The use of the mathematical model makes it easier to test the actuators' failure estimation scheme because real flight experiments with a failure actuator can be potentially dangerous for the helicopter, since it can cause the RUAV to go out of control and it may crash. Thus, we planned to simulate a real faulty condition in an actuator while away from the security problems of the RUAV. Here, we combine the fault detection algorithm with a feedback linearization control scheme to perform the simulations.
It is obvious that the yaw, longitudinal and latitudinal controls – those near to zero at the time of hovering – might be more difficult to estimate since a change in effectiveness alone would be less immediately apparent. Here, we assume that the tail collective pitch angle actuator has the failure while others are remain well. Here, we consider the actuator failure as a parameter. Next, the UKF is employed for the online estimation of both the motion states and the parameters of the helicopter AHCs. In what follows, we compare the performance of the adaptive-UKF-based and the conventional UKF-based failure estimation schemes. In addition, we refer to our recent research on a MIT-based adaptive UKF and compare it with KF-based algorithm in terms of CPU time and estimation accuracy.
Set the state vector as:

The experiment starts out with the initial augmented state:

The measurement and control interval is T = 0.02s. The UKF parameters are listed here:

Changes of Process Noise: the covariance matrix Qw as the prior knowledge is most important for the performance and stability of the UKF. If we cannot get an accurate matrix or if it changes as a result of the AHCs being modified, the UKF will suffer bad performance or even instability.
Here, we change the true process noise intensity as:

The estimation accuracy of the two different adaptive UKF algorithms with respect to changes of the process noise statistics is tested.
The estimation errors of the UKF and the KF-based adaptive UKF under the same conditions of process noise intensity change are illustrated in Figure 6. The UKF cannot produce optimal estimates due to the violation of the optimality conditions when the noise information changed at 5s. On the other hand, the estimation errors in the adaptive case are quickly overcome and almost the same as with its previous size.
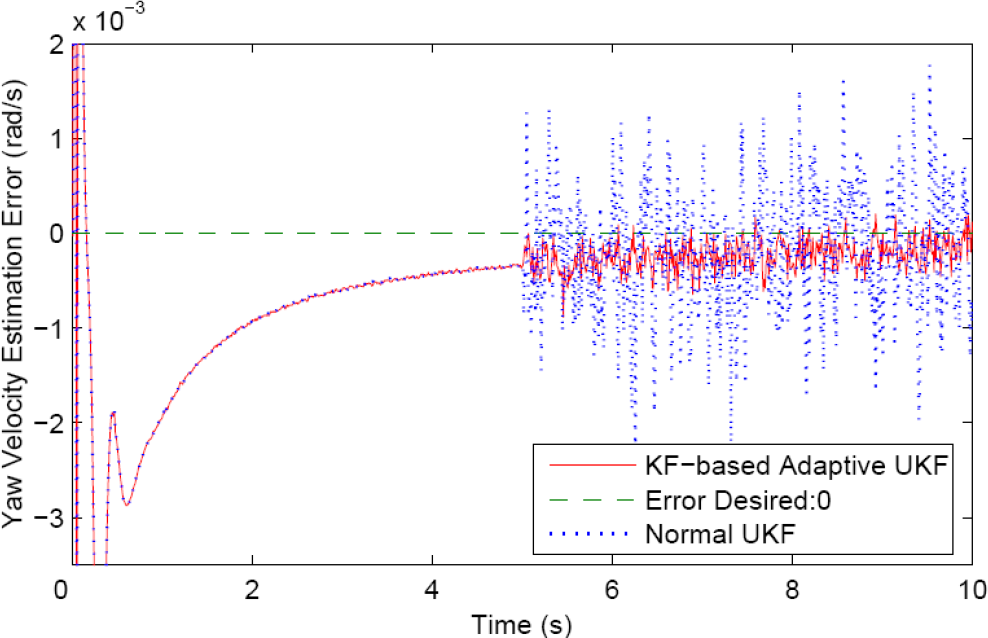
State Estimation Errors with the Time-Varying Process Noise using the KF-based UKF
Change of the AHCs' Parameters: to demonstrate the effectiveness of the failure estimation scheme of the RUAV actuators, a failure scenario of abrupt proportional reduction and bias in the tail collective pitch actuator is assumed:

In this section, we compare the performance of the adaptive UKF-based and conventional UKF-based failure estimation algorithms. The state vector is subject to zero mean additive white noise with covariance:

The other conditions of the system are the same as those in the previous section. As is shown in Figure 7, an example actuator failure experiment is presented. At t=6s, the actuator acquires the AHC parameters at a proportion of 50% and a bias of 10. The estimation of the proportional effectiveness and the failure bias AHCs' parameters can follow the true parameters in less than 4 seconds while the offsets are less than 0.4% with the adaptive UKF scheme. However, the conventional UKF based algorithm cannot estimate the true value even within 15 seconds.

The KF-based adaptive UKF AHCs' estimation
Comparisons between the MIT-based and KF-based Adaptive UKF Algorithms: we compared the KF-based adaptive UKF with the normal UKF with the help of previous simulations. In this section, we refer to our recent research results on the MIT-based adaptive UKF and see comparisons between the MIT-based and KF-based adaptive UKF algorithms, focusing on the estimated accuracy and estimated CPU times based on the simulations.
The cost function of the estimated accuracy is defined as follows:

where Nk denotes the sample times, xk denotes the states or parameters of the system and x̄k denotes the estimated states or parameters.
For the purpose of comparison between the two algorithms, we did an additional simulation. Figure 8 illustrates the Euler angles of the RUAV, including the roll angle Φ, the pitch angle Φ and the yaw angle Ψ while hovering.

The tracking performance comparison between the two adaptive UKFs while hovering with a tail collective pitch actuator failure at 6s
The comparison results in relation to the estimated accuracy and the CPU time between the two algorithms are listed in Table 2. S#1 marks the simulations where the process noise changed while S#2 marks the simulations where AHCs' parameters changed. EA, M-AUKF, K-AUKF represent the Estimated Accuracy, the MIT-based adaptive UKF and the KF-based adaptive UKF, respectively. The AHCs #1 mark the proportional effectiveness and the AHCs #2 mark the bias of the AHCs.
Performance Comparisons of the Filters
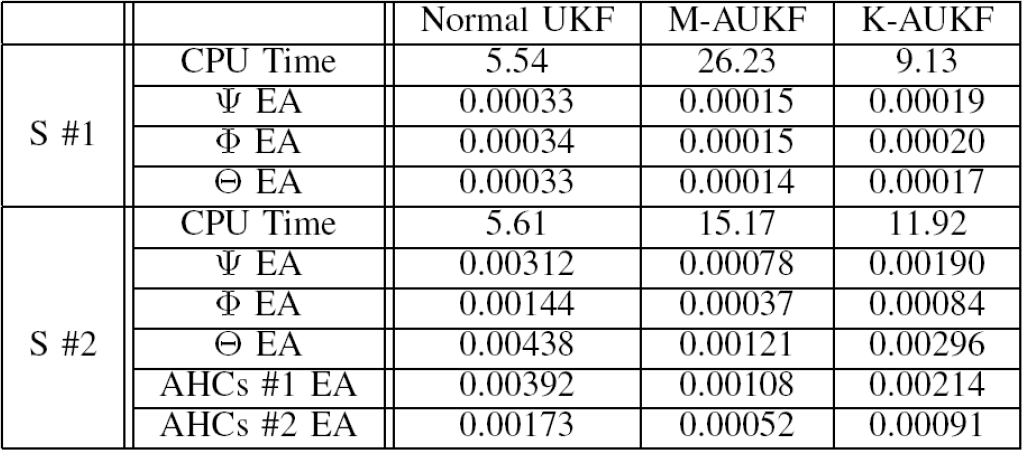
As can be seen in the table and from the figures, the two adaptive algorithms obtained much better performance than the normal UKF when the process noise or parameters changed. Compared with the two different adaptive methods, the MIT-based scheme had higher estimated accuracy, especially in during the parameter estimation. The KF-based algorithm is much shorter than the MIT-based algorithm from the point of view of CPU time. This adaptive scheme does not increase its CPU time consumption along with the number of changed parameters. However, the MIT rule-based adaptive UKF takes a longer time and rapidly increases along with the increase of the number of adaptive parameters. Generally, the KF-based method is one form of a quite simple and highly effective estimation method.
As to the CPU time, the KF-based algorithm is much shorter than the MIT-based algorithm from the point of view of CPU time. This adaptive scheme does not increase its CPU time consumption along with the change of the number of parameters. However, the MIT rule-based adaptive UKF takes longer and rapidly increases along with the increase of the number of adaptive parameters. Generally, the KF-based method is one form of a quite simple and highly effective estimation method.
6. Conclusion
This paper proposed a novel adaptive unscented Kalman filter algorithm and its application in relation to the estimation of actuators' failure for a RUAV system. A KF-based adaptive UKF has been introduced for the online estimation of states and parameters' joints. The actuators' failures have been represented by AHCs, the parameters of which can then be estimated by the system. The failure estimation schemes have been designed using a full nonlinear model of the RUAV, identified by using collected data during the flight experiments. Offline simulations indicate that the proposed scheme can automatically compensate for these failures and has the ability to effectively track of the reference input. Comparisons of this method with the MIT-based adaptive UKF show that the KF-based algorithm is a much simpler and highly effective estimation method.
In future work, the detailed demonstration of the stability of this adaptive UKF algorithm will be given. Next, we will try to test the algorithm by real RUAV flight experiments.
Footnotes
7. Acknowledgments
This work was supported by The National Natural Science Foundation of China under Grant: 61273025 and 61203334; National Key Technology R&D Program under Grant: 2011BAD20B07; National High Technology Research and Development Program (863) under Grant: 2012AA041501
The authors gratefully acknowledge the contribution of the Shenyang Institute of Automation, Chinese Academy of Sciences and the reviewers' comments.