
Abstract
This paper presents an improved modelling method for a water jet-based multi-propeller propulsion system. In our previous work, the modelling experiments were only carried out in 2D planes, whose experimental results had poor agreement when we wanted to control the propulsive forces in 3D space directly. This research extends the 2D modelling described in the authors' previous work into 3D space. By doing this, the model could include 3D space information, which is more useful than that of 2D space. The effective propulsive forces and moments in 3D space can be obtained directly by synthesizing the propulsive vectors of propellers. For this purpose, a novel experimental mechanism was developed to achieve the proposed 3D modelling. This mechanism was designed with the mass distribution centred for the robot. By installing a six-axis load-cell sensor at the equivalent mass centre, we obtained the direct propulsive effect of the system for the robot. Also, in this paper, the orientation surface and propulsive surfaces are developed to provide the 3D information of the propulsive system. Experiments for each propeller were first carried out to establish the models. Then, further experiments were carried out with all of the propellers working together to validate the models. Finally, we compared the various experimental results with the simulation data. The utility of this modelling method is discussed at length.
Keywords
1. Introduction
Recently, applications for underwater robots have increased dramatically. They can be found in such diverse areas as mine-clearing operations, feature tracking, cable and pipeline tracking and deep-ocean exploration. The configuration, size, propulsion methods and shape of underwater robots are different for each application. For example, manipulators are necessary for mine-clearing operations. If a robot is used for underwater applications, a smaller, more flexible design may be desirable for easier entry into small spaces; for high-speed movements underwater, a streamlined shape may be required.
The propulsion system is one of the critical features governing the performance of underwater robots because it controls the device. Propulsion devices can have various designs, such as paddlewheels, poles, magneto-hydrodynamic drives, sails and oars.
Paddlewheel thrusters are the most common propulsion method for underwater robots and vehicles. Usually, there are at least two propellers installed per vehicle: one for horizontal movement and the other for vertical movement. A major disadvantage of paddlewheel propellers is that they disturb the water around the underwater vehicle. Biomimetic underwater robots take their designs from nature [1], [2], [3].
The steering strategy of common underwater robots is to change the rudder angle or use differential propulsive forces for two or more thrusters. Vectored propellers are also used on underwater robots and vehicles.
1.1 Related Work
Underwater robots with different sizes and shapes have been reported. Some small autonomous underwater vehicles (AUVs) have also been described [4],[5]. Most of these underwater robots or vehicles are torpedo-like and have streamlined bodies [6]. However, others robots have adopted quite different shapes [7]. All have employed screw propellers for their propulsion system.
Underwater vehicles with vectored thrusters have been described [8], [9]. Multi-channel Hall-effect thrusters involving vector propulsion and vector composition are known [10], [11]. Vectoring thrusters used on aircrafts are also an example of a vectored propulsion system [12], [13], [14].
1.2 Motivation
A spherical underwater robot that used multiple water jet propellers as its propulsion system has been described previously [15], [16], [17], [18]. We have also modelled a single water jet propeller [19]. In [20], an introduction to the development and evaluation of a spherical underwater robot is provided. In the present work, we designed an experimental dynamic model to study the hydrodynamic characteristics of a single water jet propeller while considering the ambient flow.
In our previous work, we used only one strain gage to measure the propulsive force, limiting the accuracy of the model. Since a single strain gage can only detect force in one direction, we only proposed a 2D (horizontal plane) model [17]. We tried to extend the model to three dimensions by incorporating data from basic motion experiments. However, because of the limitations of the modelling method, the agreement of the experimental and simulation results was poor. The propulsive forces and moments used in the 2D space model were not correct for 3D motion; hence, we needed to improve the methodology to obtain more accurate modelling of the water jet propulsion system. For this paper, we redesigned the experimental system so that the modelling could be done properly in 3D space. In particular, we designed a new experimental apparatus so that the mass distribution of the propulsion system was exactly centred on the robot.
1.3 Outline of the Paper
This paper is structured as follows: Section 1 provides the background to the research described. Section 2 introduces the design of the experimental mechanism as well as the orientation vectors and the surface. We also introduce multiple coordinate systems for the propulsion system. The modelling experiments are described in Section 3, with the modelling results illustrated by propulsive surfaces. Section 4 describes the verification experiments and provides a discussion of the results. Section 5 gives the conclusions for this research.
2. Technical Approaches
We needed to model not only a single water jet propeller but also the performance of the whole propulsion system. Consequently, we carried out the modelling experiments directly in 3D space. First, we measured the position of the centre of mass of the robot and then redesigned the experimental mechanism according to the mass distribution and configuration for three water jet propellers.
2.1 Design of the Experimental Mechanism
We were interested primarily in the propulsive effect when the propulsion system is used on the robot rather than just the characteristics of one water jet propeller. In other words, we wanted our experimental mechanism to have a propulsive effect that was equivalent to that of a real robot. Such a mechanism would help us to develop and improve a real propulsion system without requiring underwater experiments with an entire robot. The new experimental mechanism is shown in Fig. 1.

Design of the experimental mechanism
For the purpose of measuring the mean resultant force and moment in 3D space, we used a BL six-axis load cell sensor (Fig. 2) that could detect forces and torques in the X, Y, and Z directions simultaneously and in real-time. All the propellers were suspended from the centre of the load cell. The relative position between the load cell and three propellers was the same as the position between the robot's mass centre and its three propellers. In this way, we modelled the propulsion system with its propulsive effect as if it were a real robot.
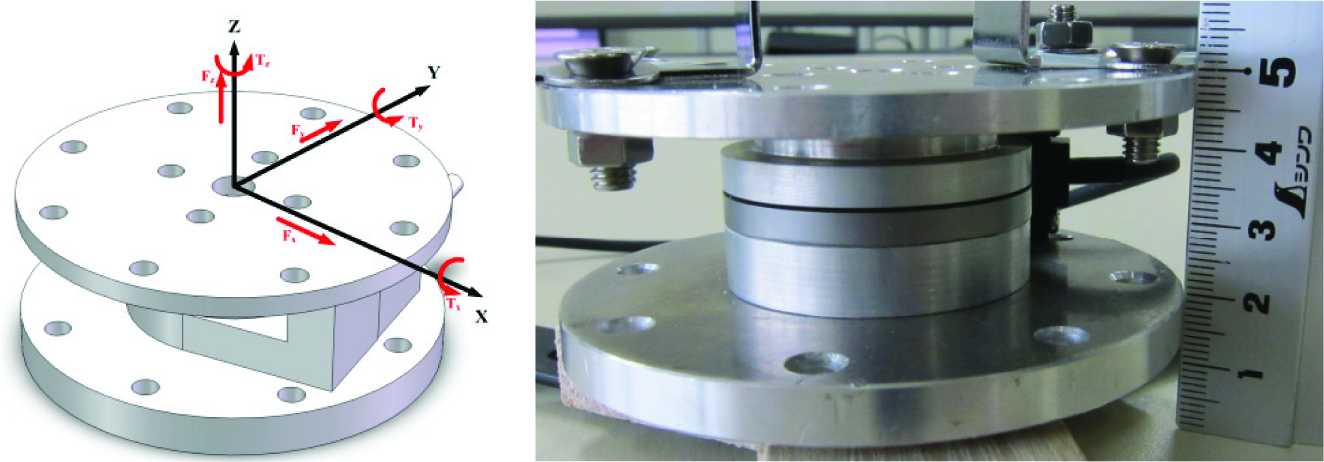
The BL six-axis load cell sensor
2.2 Orientation Vectors and Surface
Orientation vectors and an orientation surface are important in the modelling. We defined a spherical coordinate system for each propeller

(a) Propeller-fixed coordinate system; (b) Orientation vectors and surface
The normal vectors of the spherical surface could be used to determine the force vectors and thereby generate the resultant mean propulsive forces. The normal vector space N ∈ ℝ for one water jet propeller denoted in propeller-fixed coordinates was as follows:

2.3 Propulsion System Coordinates
We defined another joint-fixed coordinate
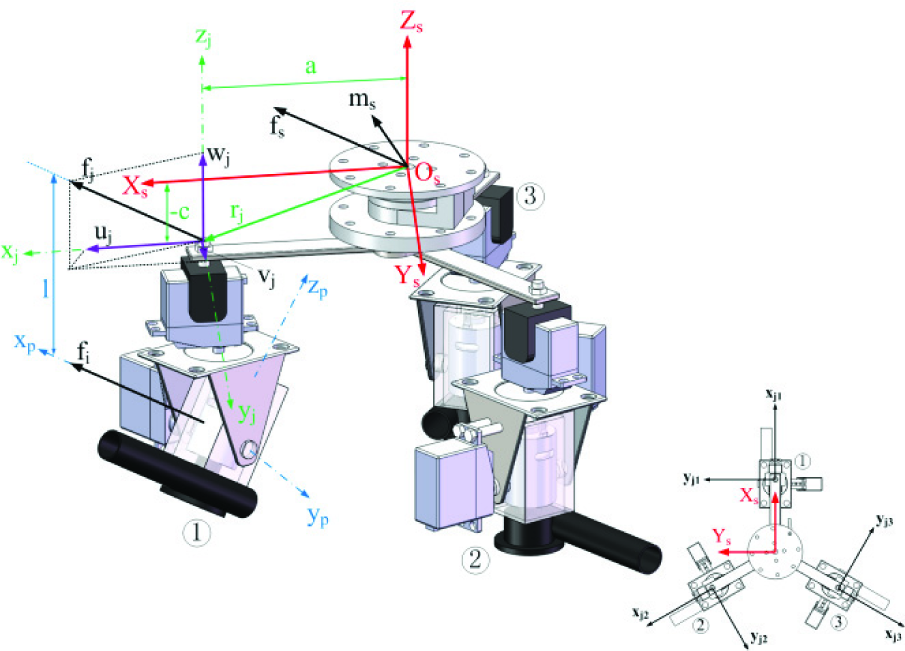
Coordinates of the multiple propellers
Here,
Each water jet propeller produced a mean force vector

where

3. Modelling Experiments and Results
The experiments used different α and β as control inputs to obtain propulsive forces and moments as outputs. These variables were input as propeller-fixed coordinates and the outputs were obtained as robot-fixed coordinates. Therefore, the system was like a black box that included a transformation of coordinates. As a result, each propeller had different coordinate transform information. We needed to carry out modelling experiments for each propeller.
We focused on the combination of different direction angles and, therefore, set the mean force of each propeller as a constant 6.5 N. For the modelling, we carried out experiments to determine the relationship between different α, β and r=[

For each value of α and β was varied from -π / 3 to π/3.
The output forces and moments were functions of α and β. Therefore, the propulsive surfaces were used to describe the relationship between the input direction angles and the propulsive forces and moments. Surface functions were developed to describe these surfaces. The experimental data was first plotted as interpolant surfaces and different surface-fitting methods were evaluated. Finally, we found that a third-order polynomial surface fulfilled our requirement.
The variables fx, fy, fz, Tx, Ty and Tz could be described in the same general form of a third-order polynomial equation, i.e.:

where Cij is the coefficient of the term aibj, a indicates the value of α, b indicates the value of β. Figs. 5–7 show the experimental results and fitted surfaces for the propulsive surfaces of propellers 1, 2 and 3, respectively.
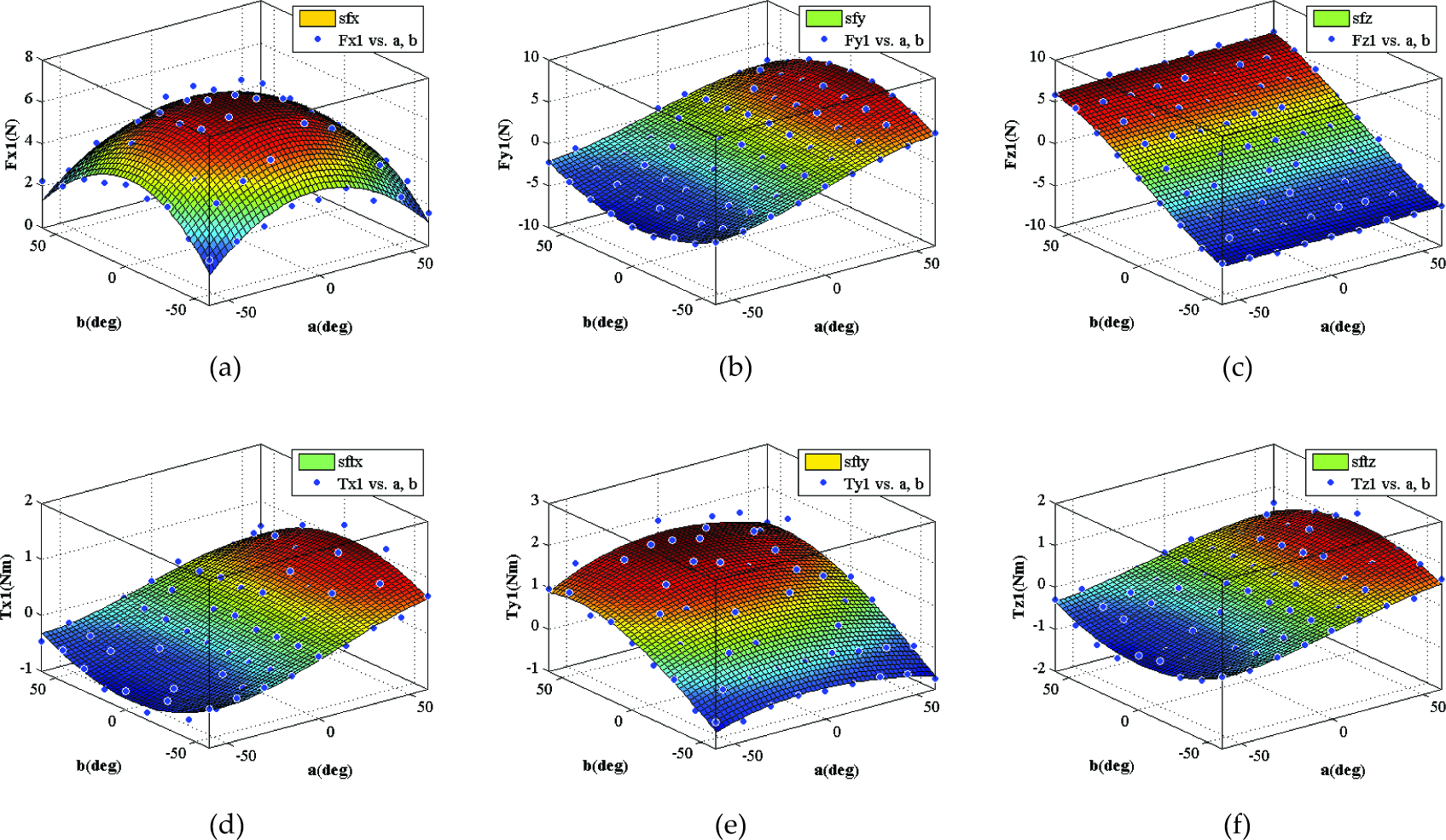
Propulsive surfaces for propeller 1. (a), (b) and (c) are the fitted surfaces for forces in the x, y and z directions, respectively; (d), (e) and (f) are the fitted surfaces for moments in the x, y and z directions, respectively.
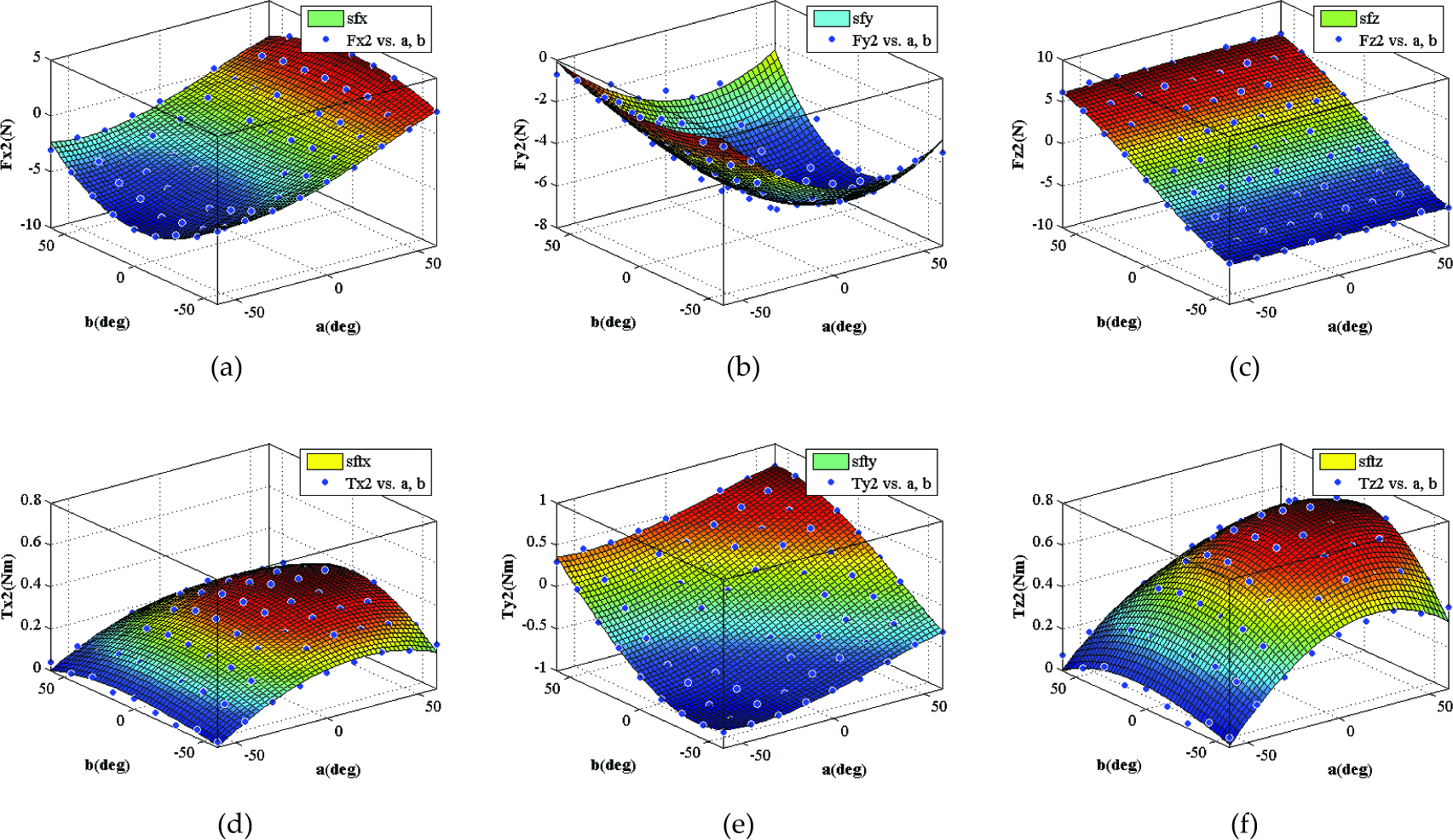
Propulsive surfaces for propeller 2. (a), (b) and (c) are the fitted surfaces for forces in the x, y and z directions, respectively; (d), (e) and (f) are the fitted surfaces for moments in the x, y and z directions, respectively.
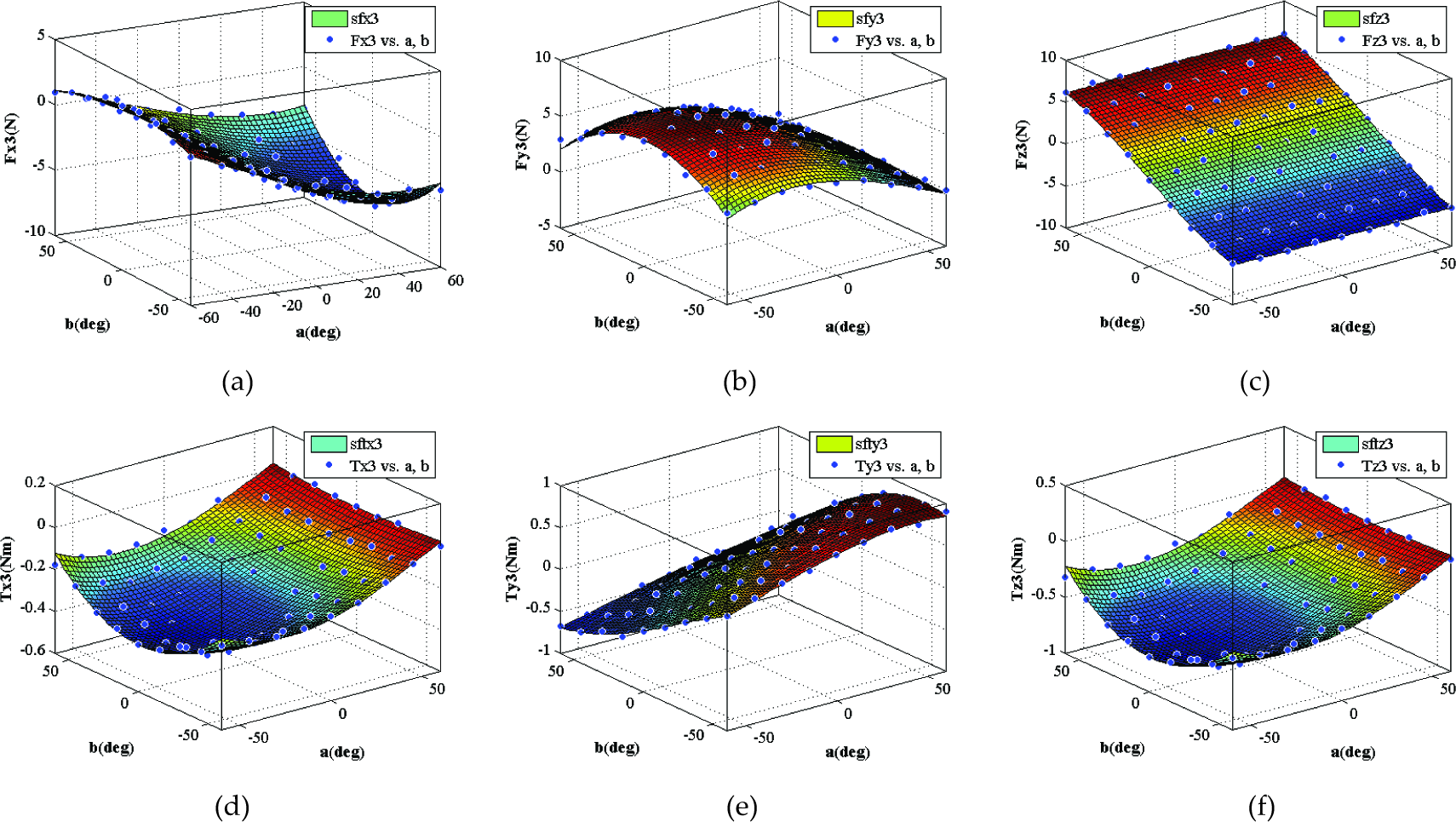
Propulsive surfaces for propeller 3. (a), (b) and (c) are the fitted surfaces for forces in the x, y and z directions, respectively; (d), (e) and (f) are the fitted surfaces for moments in the x, y and z directions, respectively.
It should be noted that the third-order polynomial equation includes the 3D information of coordinate transformation. This means the direct propulsive forces and moments acting on the robot which are expressed in the robot-fixed coordinate can be obtained by simply adjusting the orientation angles in the propeller-fixed coordinate. Therefore, to obtain the effective resultant propulsive force and moment, we can synthesize the propulsive vectors of the propellers in 3D space.
4. Verification and Discussion
4.1 Verification Experiments
Based on the experimental modelling results, we carried out combined experiments using multiple propellers to verify the utility of the model. We first carried out experiments with all the propellers working and at different directional angles, and obtained the effective propulsive forces and moments. Then, we used the modelling results of equation (4) for three propellers to simulate the same running conditions for multiple propellers. Finally, we compared the experimental and simulation results. Because the propulsive forces were actually vectors, the combined experiments required vector synthesis. The force vector could be expressed as:
where

Experimental and simulation results for force verification. (a), (b) and (c) are the experimental results; (d), (e) and (f) are the simulation results.

Experimental and simulation results for moment verification. (a), (b) and (c) are the experimental results; (d), (e) and (f) are the simulation results.
We know that all the six variables fx, fy, fz, Tx, Ty and Tz have their own model equations which come from the general equation 4. To illustrate the implementation of equation 4, we take the motion in the horizontal plane as an example. In this case, the resultant propulsive force should be in the horizontal plane; meanwhile, the rotation moment should be minimized. Accordingly, the constraint conditions are:

where Fconst1 and Fconst2 are the expected propulsive forces according to the task and the dynamics model. Next, we can solve the equations to get the angles of α and β. We used GPC (Generalized Predictive Control) to control the horizontal motion. In the horizontal plane, we set the control law to change the angles of α and β, and the propulsive forces were set as constant. The control process is that the recognized CARIMA model is built at each sampling time and, accordingly, the control law will adjust to the newly recognized CARIMA model. Moreover, by carrying out the least-squares method, the controller will calculate the necessary value of angles α and β according to the pre-set tracking path in the horizontal plane.
4.2 Discussion
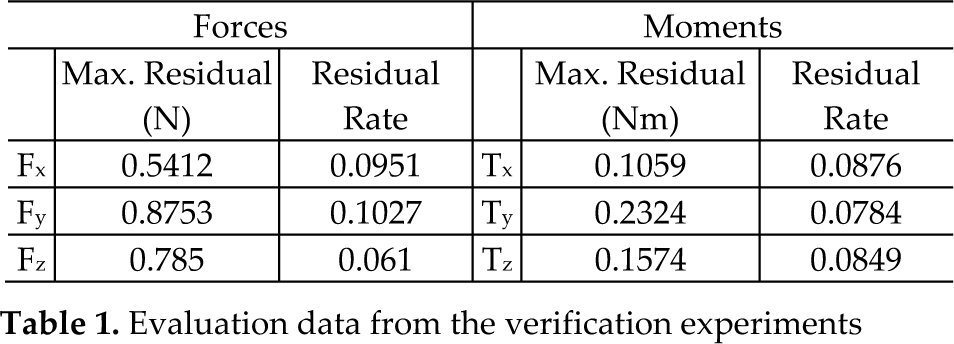
To evaluate the reliability of the verification experiments, we calculated the residuals between the experimental and simulation results. Fig. 10 shows that all the residual plots were evenly distributed around the zero plane, which means that the experimental and simulation results were in good agreement. Table 1 lists the maximum residuals and residual rates for the verification experiments. The maximum residual rate was about 10%, which fulfilled the working requirement for our robot.

Residuals for verification experiments. (a), (b) and (c) are the residuals for forces; (d), (e) and (f) are the residuals for moments.
Evaluation data from the verification experiments
5. Conclusions
We have extended the modelling described in our previous work. We considered a transformation of coordinates in the designed the experimental mechanism; thus, the mechanism could be used to find the relationship between the input control signal and output forces/moments. We redesigned the entire experimental device to extend our previous 2D model into 3D space and developed a 3D model for a vectored water jet-based multi-propeller propulsion system.
To develop this model, we first defined the orientation surface in order to describe the orientation of the propeller nozzle; this surface was needed to describe the propulsive vectors. Then, we carried out experiments for each of the propellers. Different combinations of α and β were used, with 81 groups of experiments carried out for each propeller. The experimental data was used to develop a model for propulsive surfaces that included 3D information. Finally, experiments were conducted to verify that the model was applicable when all the propellers were used. These experimental results were in good agreement with the simulation data; their residual rates were acceptable for the implementation conditions defined for our robot.
From the experimental results, the dynamic model of the multiple water jet-based propulsion system was established. According to the experimental data, we employed a third-order polynomial equation which can simply describe the relation of the input signal (orientation angles of the nozzles) and the output (propulsive forces). This equation can be implemented in practical propulsion system control by inversing the equation to get the necessary input orientation angles from the expected propulsive forces.
Footnotes
6. Acknowledgements
This research was supported by the Kagawa University Characteristic Prior Research Fund 2011.