
Abstract
Six-dimensional broadband vibration isolation is necessary for precision manufacturing, testing and assembly. A six-dimensional nearly zero-stiffness mechanism based on singular parallel mechanisms was proposed, which was taken as the main structure of the vibration isolator to reduce the system's natural frequency. Then control methods of configure maintenance and active vibration isolation were researched using feedback linearization and H∞ robust control means. Finally six-dimensional active and passive vibration isolation control simulations were carried out respectively. The simulation results show that the vibration isolator has higher six-dimensional broadband vibration isolation capability and feasibility.
1. Introduction
Currently, multi-dimensional vibration isolation is mainly classed as passive, [Ma et al., 2004], semi-active, [Zhu et al., 2008], active, [Chen et al., 2004; Yang et al., 2009; Hoque et al., 2011] and hybrid vibration isolation, [Zhang et al., 2007; Yang et al., 2007; Pu et al., 2010]. Passive vibration isolation decreases the system's natural frequency by use of rubber, air cushion, mechanical spring, etc., but these vibration transmitters have to supply support force of load, and the dilation range of any transmitter is limited, hence the system's natural frequency cannot be very low. Therefore, passive vibration isolation is not effective for low or ultra-low frequency vibration. Semi-active vibration isolation regulates damping force by controlling adjustable damping devices such as a magneto-rheological damper to suppress the harmonic peak, but the system's natural frequency is still not reduced, hence semi-active vibration isolation capability is limited. Active vibration isolation is realized by the use of closed-loop calibration; this method is extremely flexible, but active vibration isolation is effective only for low frequency vibration and its reliability and robustness are also very low.
Over recent years, more and more people have addressed hybrid vibration isolation methods in order to realize broadband vibration isolation. For example, a vibration isolation system for a micro-manufacturing platform was set up in Zhang et al. [2007], which isolated middle and high frequency vibration by the use of air springs, and isolated low and ultra-low frequency vibration by the use of giant magnetostrictive actuators. A vibration isolation platform with eight pneumatic actuators was built up in Yang et al. [2007], which isolated low frequency vibration by controlling the air springs and isolated high frequency vibration by utilizing the low-pass characteristics of air. A three-dimensional vibration isolation system, actuated by air cylinders and voice coils, was set up in Pu et al. [2010], which realized middle and high frequency vibration isolation by utilizing the low-pass characteristics of air and isolated low frequency vibration by the use of voice coils. But all of these soft transmitters have to support force of load, hence the isolation of the frequency of passive parts of the system cannot be lower and reliability of vibration isolation cannot be higher.
In this paper, a six-dimensional nearly zero-stiffness mechanism is proposed and then a six-dimensional broadband vibration isolator is built up by the use of this mechanism, which can achieve very low natural frequency by holding the mechanism near singular configure, hence it can effectively isolate broadband vibration.
2. Six-dimensional nearly zero-stiffness mechanism
A 3-RS parallel mechanism is shown in Fig. 1, the R pair of every branch link is fixed at the base and the S pair is fixed at the support platform. If the support platform plane is coincident with the base plane, which is defined by the three R pairs and parallel with XY-plane, the 3-RS parallel mechanism becomes singular. As shown in Fig. 2, the six constraint screws

3-RS parallel mechanism
The constraint screws of the support platform
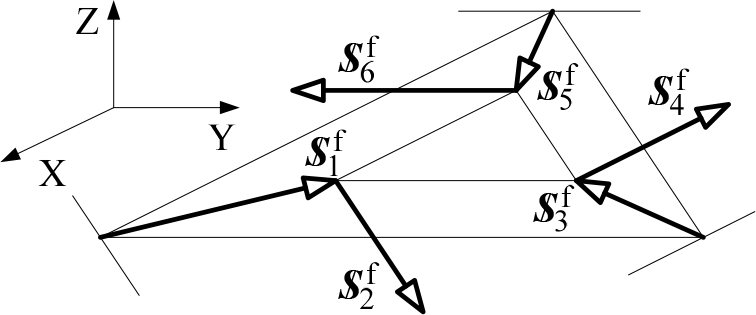
A 6-SS parallel mechanism is shown in Fig. 3, the S pair at the end of every branch link is fixed at the base, the S pair at the other end is fixed at the middle suspension fork. The six S pairs on the base must satisfy two conditions: firstly, the two lines connecting any two couples of the S pairs cannot be parallel with each other, secondly, the line connecting any couple of the S pairs cannot be parallel with the middle suspension fork plane. If the six SS branch links are parallel with Z-axis and perpendicular to the middle suspension fork plane, the 6-SS parallel mechanism becomes singular. As shown in Fig. 4, the six constraint screws
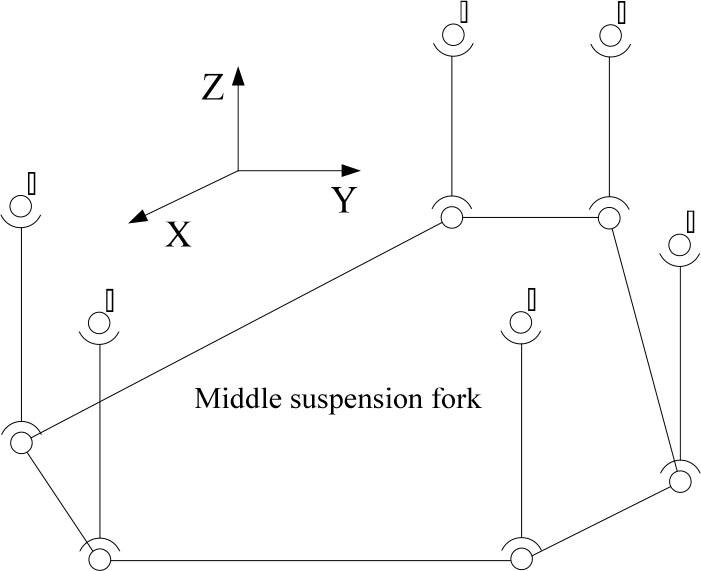
6-SS parallel mechanism

The constraint screws of the middle suspension fork
The two parallel mechanisms under the singular configure respectively, as shown in Fig. 1 and Fig. 3, and are assembled together into a new mechanism as shown in Fig. 5. According to the above analysis, stiffness of the support platform of the new mechanism with respect to the base is transiently zero along any direction, and near the singular configure, its stiffness is close to zero along any direction.

The six-dimensional nearly zero-stiffness mechanism
3. Six-dimensional hybrid vibration isolation scheme
While a definite load is placed on the support platform as shown in Fig. 5, the support platform declines and deviates from zero-stiffness configuration. In order to hold the support platform near zero-stiffness configuration, as shown in Fig. 6, a P pair is appended onto every branch link of the mechanism, thus the mechanism can be held near zero-stiffness and six-dimensional broadband vibration isolation can be realized by controlling the motion of all P pairs.

The six-dimensional vibration isolator
4. Dynamics model
Since the load mass is greater than the mass of all of the branch links and actuators, their mass can be neglected, and then only the mass and inertia of the support platform and middle suspension fork, and load are taken into account. Deformation of the support platform and middle suspension fork is also neglected and only deformation of all of branch links is taken into account.
According to Lagrange's equation, neglecting the 2nd order coupling items of micro-motion and velocity, the dynamics model can be described as follows:



where x = [x,y,z,α,β,γ,z1,α1,β1]T is the coordinate vector of the support platform with respect to the inertial frame, here, x,y,z,α,β,γ are the six-dimensional micro-motion coordinates of the support platform with respect to the inertial frame, z1 is the micro-translation coordinate of the support platform with respect to the middle suspension fork along Z-axis, α1,β1 are respectively the micro-rotation coordinates of the support platform with respect to the middle suspension fork around X-axis and Y-axis,
5. H∞ robust control
While the support platform of the six-dimensional vibration isolator is near the singular configuration, its stiffness is close to zero, and very great control force should be supplied. Its position accuracy is hard to be ensured and the direct disturbance will also make the support platform more unstable. Hence in this paper a H∞ robust control method is researched in order to achieve above multiple control objectives.
As for Eq. (1), suppose the position

where
Substituting Eq. (4) into Eq. (1) yields

where
Adopt a coordinate transformation as follows:

where
Substituting Eq. (6) into Eq. (5) yields

where

Define the aid control input

and then substituting them into Eq. (7) yields


where

Define H∞-norm of

it is actually peak of maximal singular value of frequency response of the system.
The system is asymptotic stable, and ‖
A symmetric positive definite matrix


Then, the H∞ robust control law of the system is as follows:


For the two ends of inequality (12), respectively left-handed and right-handed multiplying by

Define

According to the Schur additional lemma, inequality (14) can be written as inequality (10). Proof is over.
Define

Take the optimum solution

Where N is the weight matrix,

Thus, the optimum solution

then

here

Handling Eq. (16) yields the optimum control law:

6. Active vibration isolation simulation with direct disturbance
The structural and physical parameters of the six-dimensional vibration isolator are as follows:
the radius of circumscribed circle of the support platform is rm = 300mm, the radius of circumscribed circle of the middle suspension fork is Rb = 4000mm, the sectional area of every branch link is A0 = 1200mm2, the original lengths of the nine branch links are respectively L1=L2=L3=3164.1mm, L4=1000mm, L5=600mm, L6= 1100mm, L7=1200mm, L8=770mm, L9=850mm, the mass of the support platform and load is mm=100kg and the rotary inertia of the support platform and load is Jmx=Jmy=Jmz=8 kg·m2. The mass of the middle suspension fork is mb=30kg, the rotary inertia of the middle suspension fork is Jbx=Jby=Jbz=2 kg·m2, the elastic modulus and damping coefficient of material of every branch link are respectively E=220GPa, c=70 N·s/m.
As for inequality (10), set

and using the feasp solver of Matlab/LMI toolbox, solving inequality (10) yields

Combining Eq. (18) with Eqs. (11) and (17) can yield the active controller of the six-dimensional vibration isolator.
Impose the following six-dimensional direct disturbance onto the support platform:
Along X-axis, f dx = 3 sin 2πt N
Along Y-axis, f dy = 3 sin 2πt N
Along Z-axis, f dz = 3 sin 2πt N
Around X-axis,f dα = 2 sin 2πt N·m
Around Y-axis, f dβ = 2 sin 2πt N·m
Around Z-axis, f dγ = 2 sin 2πt N·m
Additionally, impose the vibration δx,δy,δz, θx,θy,θz from the ground onto the base along six-dimensional directions, whose linear amplitude is A
δ
=5mm, angular amplitude is

The displacement response of the support platform under active vibration isolation
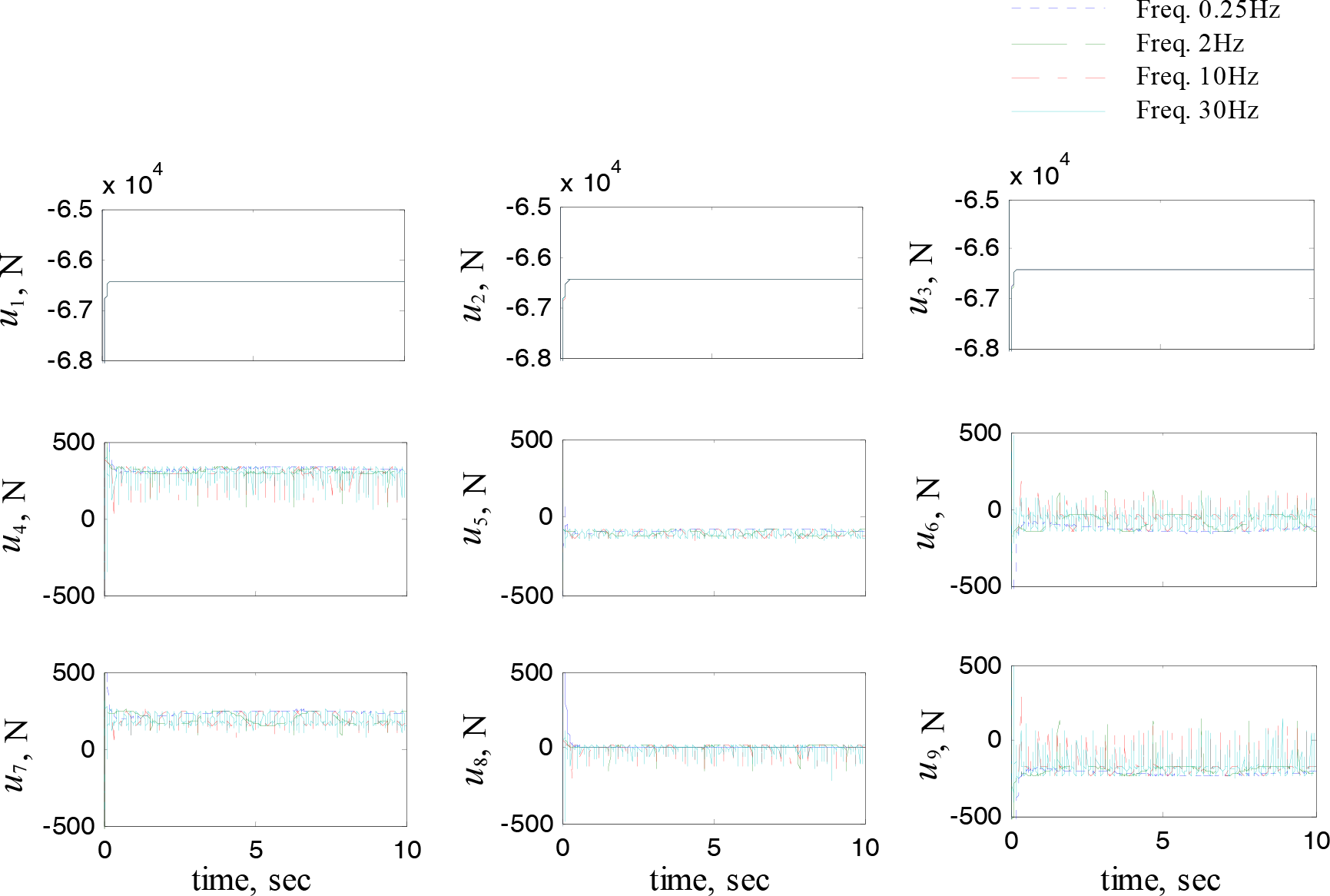
The actuated forces needed under active vibration isolation
From Fig. 7, vibration components x, y, z, α, β, γ of the support platform with respect to the inertial frame are close to zero, hence it shows that good vibration isolation effects are achieved. Since the support platform and load need a larger supporting force, the coordinate z1 of the support platform with respect to the middle suspension fork approaches −2mm, but this error can't rapidly make the stiffness of the system arise.
From Fig. 8, actuated forces u1, u2, u3 of the three actuated joints of the 3-RPS mechanism part of the six-dimensional vibration isolator are about 104N, and actuated forces u4, u5, u6, u7, u8, u9 of the six actuated joints of the 6-SPS mechanism part are about 102N, hence the control forces needed for vibration isolation can be accepted.
7. Passive vibration isolation simulation
As for Eq. (3), suppose the direct disturbance

As for the vibration isolator, [x = 0, y = 0,

where Hed is the vibration transmission function from the dth component of the six-dimensional vibration δx,δy,δz,θx,θy,θz of the base to the eth coordinate of the position x,y,z,α,β,γ of the support platform,
According to the transmission function as expressed in Eq. (20), the vibration transmission ratios under the four kinds of configurations are illustrated in Fig. 9 using a numerical simulation. It can be seen that the vibration transmission ratios are increasingly higher with increasing error of the z1 coordinate, above all, when z1=-50mm, the increasing vibration transmission ratios are very obvious and within the frequency range beyond 1 Hz, passive vibration isolation effects under the four kinds of configurations are also very obvious. The minimum of attenuation ratios of their vibration responses reaches 10dB, therefore, when the other configuration parameters are invariable, if only ensuring −30mm≤z1≤0, broadband vibration isolation efficiency and reliability of the six-dimensional vibration isolator can obviously rise.
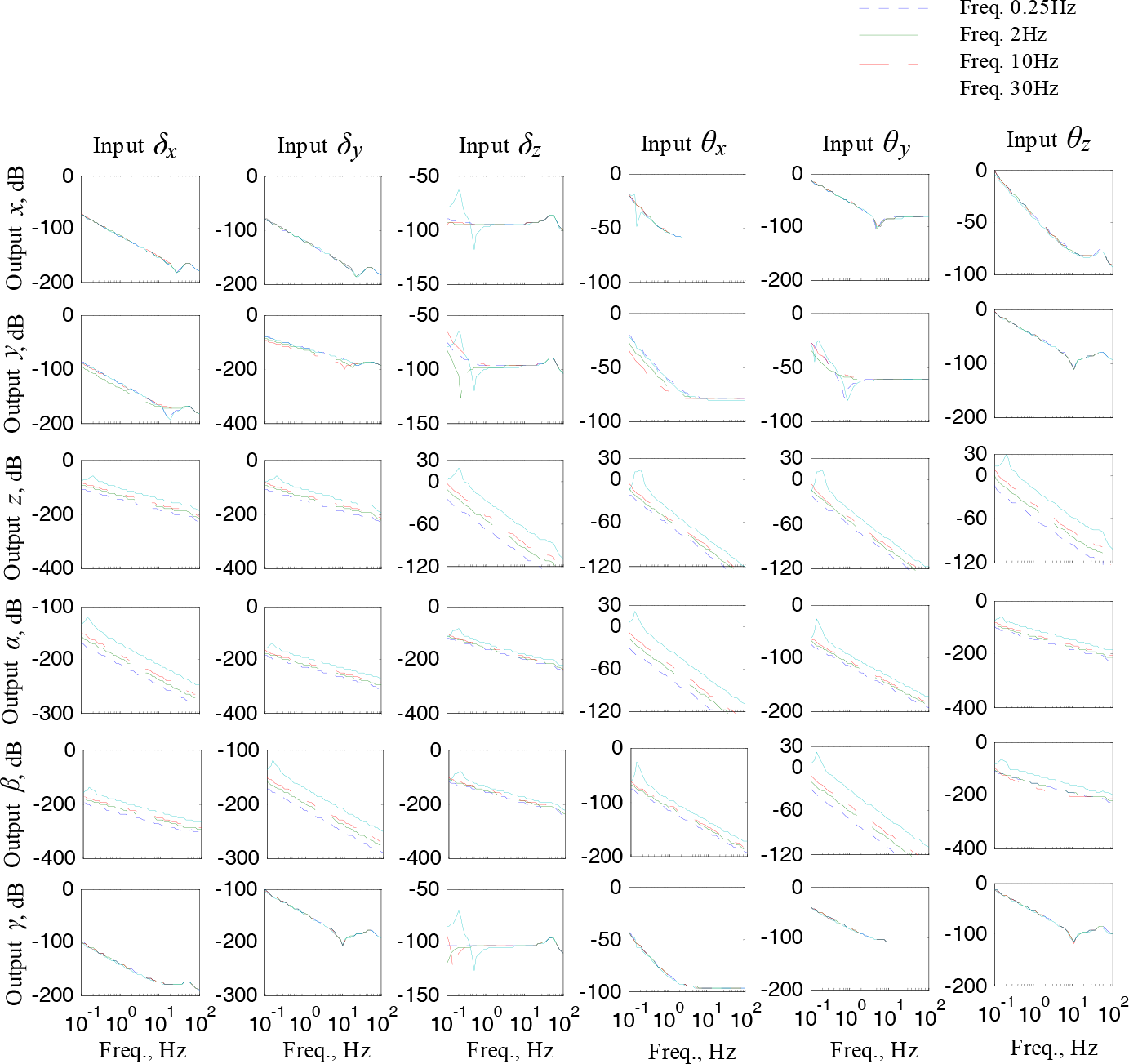
The vibration transmission ratios of the vibration isolator under passive vibration isolation
8. Conclusions
The H∞ robust control method proposed in this paper can achieve multiple objectives such as reducing configure control errors, decreasing actuated forces and suppressing direct disturbance, at the same time, it can realize low frequency vibration isolation.
By holding the six-dimensional vibration isolator near the singular configuration, the low frequency vibration isolation capability of the passive part of the system greatly increases, so the efficiency and reliability of the six-dimensional vibration isolator can obviously arise.