
Abstract
The novel design of parallel mechanisms plays a key role in the potential application of parallel mechanisms. In this paper, the type synthesis of parallel mechanisms with the first class GF sets and two-dimensional rotations is studied. The rule of two-dimensional rotations is given, which lays the theoretical foundation for the intersection operations of specific GF sets. Next, kinematic limbs with specific characteristics are designed according to the 2-D and 3-D axes movement theorems. Finally, several synthesized parallel mechanisms with the first class GF sets and two-dimensional rotations are illustrated to show the effectiveness of the proposed methodology.
1. Introduction
The demand for proposing parallel mechanisms with specific characteristics has become increasingly important since parallel mechanisms have potential applications in many sectors, such as machining, positioning and manipulating. In particular, Altuzarra et al. [1] proposed some parallel mechanisms with two-dimensional rotations, including 3-, 4- and 5-DOF parallel mechanisms which can be employed in the application of machining. Up until now, a number of parallel mechanisms with two-dimensional rotations have been proposed. For instance, Gogu [2] presented several fully isotropic parallel mechanisms with four degrees of freedom of the T2R2-type. Moreover, Piccin et al. [3], Motevalli et al. [4] and Gogu [2] developed numerous parallel mechanisms with 5 DOFs and two rotations. The type synthesis of multi-degree of freedom parallel robotic mechanisms has been a hot subject of research over the last few decades. The mathematical tools employed include graph theory [5], lie group theory [6–9], screw theory [10–12], linear transformation [2,13], position and orientation characteristics equations [14] and GF set theory [15,16]. A large number of parallel mechanisms have been synthesized systematically according to the above-mentioned theories, from which both industry and academia benefit.
The synthesizing method utilized in this paper does not rely on any reference coordinate system and only requires the intersection operations of sets. Moreover, the mobility of the synthesized parallel mechanisms according to GF set theory is not instantaneous. GF sets are introduced for the evaluation of the characteristics of the end-effectors of robotic manipulators. Moreover, the method for the type synthesis of parallel mechanisms with the first class GF sets and two-dimensional rotations (FG2RPM for short) is studied. Furthermore, the rule of two-dimensional rotations was proposed to establish the computing algorithms of GF sets for the type synthesis of FG2RPM. Several parallel mechanisms were depicted to show the effectiveness of the synthesizing methodology.
2. Relevant results of GF sets theory
Many criteria have been established for evaluating the performance of robotic mechanisms. They include workspace, velocity, acceleration, payload and stiffness. It is necessary to develop an effective, efficient and general performance criterion that is applicable to the design of the topologies for robotic mechanisms. Such a general criterion should be non-algebraic, dimensionless and independent of the choice of coordinate systems. This is in contrast to the existing criteria of workspace, velocity, acceleration, payload and stiffness. The latter criteria, all of which are in algebraic form, dimensional, and related to coordinate systems, cannot handle the extremely diverse range of topology performances of robotic mechanisms. As a result, we employ a specialized set theory to describe the topological constraints that limit the kinematic mobility of the end-effectors of robotic mechanisms, which is called the generalized function set (or GF set) [15,16].
GF sets features the kinematic structure
From the viewpoint of the influence between translation and rotation, we classify the GF sets into two categories, namely, the first class GF sets and the second class GF sets. Detailed classifications of the GF sets are listed in Table 1. Unlike the more usually used notations used to describe the characteristics of robotic manipulators (such as 3T2R, 3R2T and 2T1R), by using the concept of GF sets we can distinguish different robotic manipulators in a simple and clear manner.
In this paper, we focus on the type synthesis of FG2RPM, indicating that the GF sets
Enumeration of two classes of GF sets

The GF set whose rotation axis Rα is perpendicular to the plane containing T a and T b belongs to the first class GF set G F ‖(T a T b 0; Rα 0 0).
The GF set whose rotation axis Rα coincides with the translation direction T a belongs to the second class GF set.
3. Rule of two-dimensional rotations
Robotic manipulators may have serial or parallel topologies. While the characteristics of the end-effectors of a serial topology depend directly on the sum of the characteristics of all the kinematic pairs, the characteristics of the end-effector of a parallel topology are the intersections of the characteristics of the end-effectors of all the limbs. The existence of translations is straightforward to verify, while the existence of rotations is a little bit difficult. As such, it is necessary to find the requirements for the two dimensional rotations of rigid bodies, which are as follows.
The rule of two-dimensional rotations: when a rigid body rotates around two intersecting axes passing point A, all the vectors fixed to the rigid body should have the same rotations as the vectors fixed to point A. Moreover, point B should be able to translate freely in 3-D space in order to compensate the accompanying translations caused by the rotations around point A.
It is worth pointing out that the accompany translations are not necessary, given the fact that the two axes passing point A coincide with the two axes passing point B. Furthermore, if there is only one axis passing point A which coincides with one axis passing point B, then the translations required reduce to two dimensional translations which are perpendicular to the other axis which does not coincide.
4. Intersection algorithms of GF sets
Utilizing the rule of two dimensional rotations, we can achieve the intersection algorithms for the three required GF sets, which are
4.1. The Intersection Algorithms for the GFF Set
Table 2 lists 10 possible intersection algorithms for the GF set
4.2. The Intersection Algorithms for the GFF Set
Five possible intersection algorithms for the GF set
4.3. The Intersection Algorithms for the GFF Set
As far as the intersection algorithms for the GF set
Intersection algorithms for


Intersection algorithms for
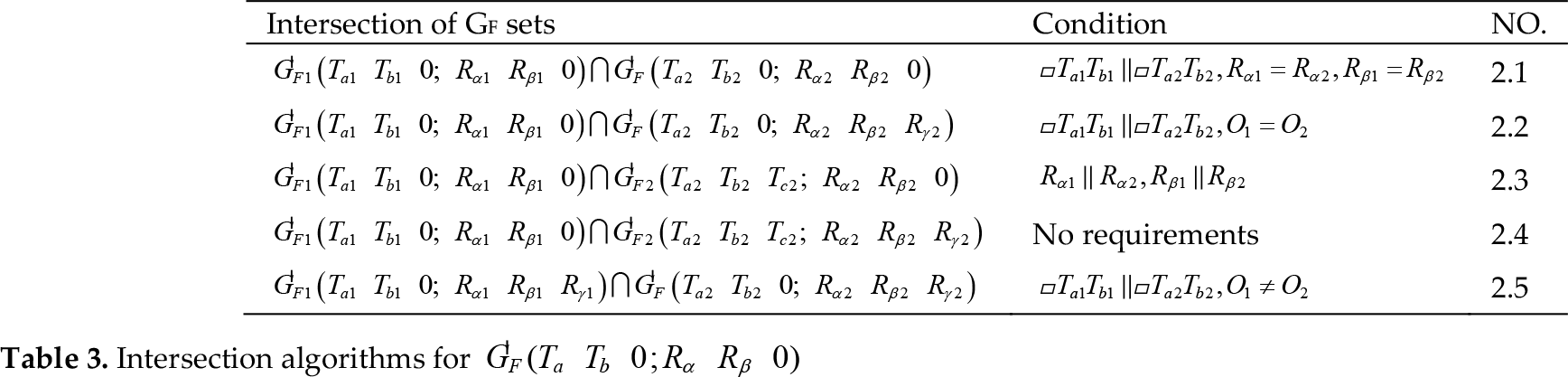
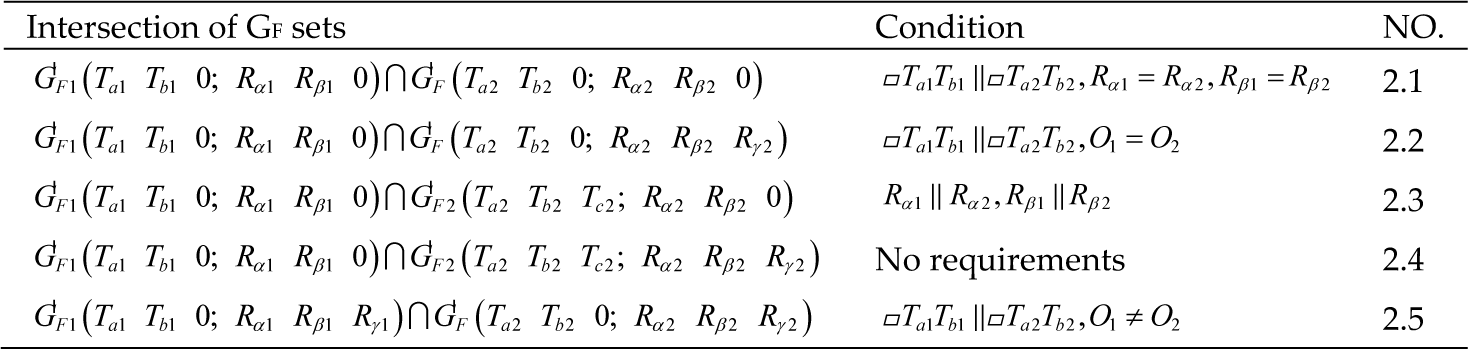
Intersection algorithms for

5. Compositions of the characteristics of limbs for the FG2RPM
The characteristics of the end-effectors of parallel topologies are the intersections of the characteristics of multiple limbs, namely:

The relationship between the number of limbs (n), the dimension of the characteristics of the end-effectors for parallel topologies(FD), the number of actuators of limb (qi) and the number of passive limbs (p) is as follows:

According to the algorithms listed in Table 2–4 and Eq. 1 and Eq. 2, we can achieve the typical compositions for the GF sets

It is worth pointing out that more compositions for the three required GF sets could be achieved by using the results listed in Table 2, Table 3, Table 4, Eq. 1 and Eq. 2.
Typical compositions for the GF Set

Typical compositions for the GF Set

Typical compositions for the GF Set

6. Design of Kinematic Limbs with Specific GF Sets
6.1. Axes movement theorems
For designing kinematic limbs with specific GF sets, we propose two theorems in terms of the axis movement. By using the two theorems, more kinematic limbs can be deduced from the simple kinematic limbs.
Theorem of axis movement in a 2-D plane. On one plane, if a kinematic chain has 2-D translations and one-dimensional rotation perpendicular to the 2-D translation plane, no matter where the revolute joint is the end-effector of the kinematic chain can rotate around any axis so as to be perpendicular to the 2-D plane on the end-effector.
Theorem of axes movement in 3-D space. In a 3-D space, if a kinematic chain has 3-D translations and rotations, no matter where the rotation joints are the end-effector of the kinematic chain can be around any point of the end-effector so as to rotate with the same rotations of the joints.
6.2. Design of kinematic limbs with specific characteristics
In order to synthesize the FG2RPM, we need to first design kinematic limbs with the required characteristics. According to the type of compositions listed in Table 5–7, the necessary kinematic limbs include those limbs with the characteristics of
By using the 2-D or 3-D axis movement theorems, we can generate kinematic limbs with specific characteristics from the simple and intuitive kinematic limbs that contain traditional joints and composite joints [17]. Consequently, several typical kinematic limbs with the above-mentioned five different characteristics are sketched in Figure 1–4 and listed in Table 8, respectively. In particular, the composite joint

Kinematic limbs with the characteristics of
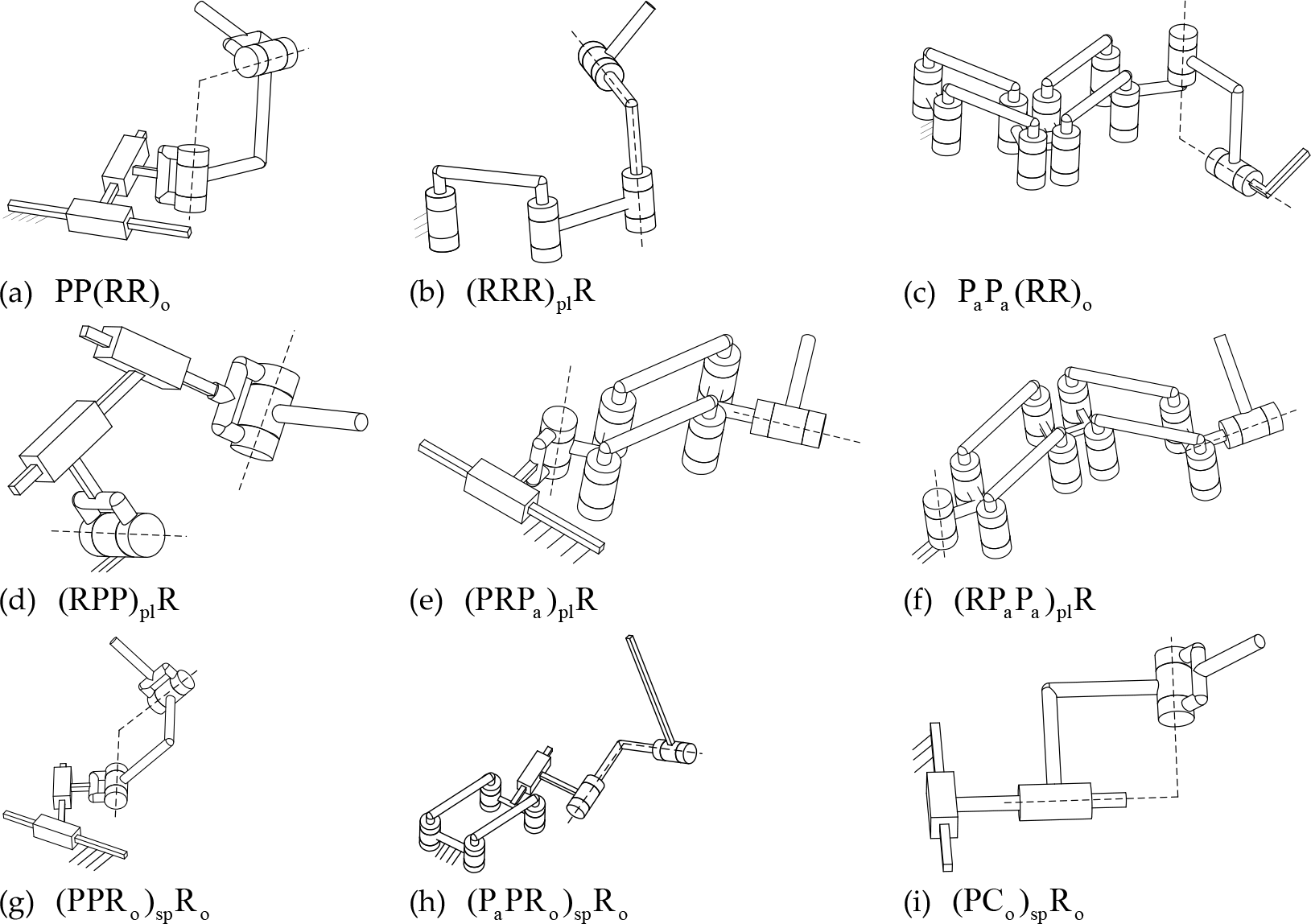
Kinematic limbs with the characteristics of
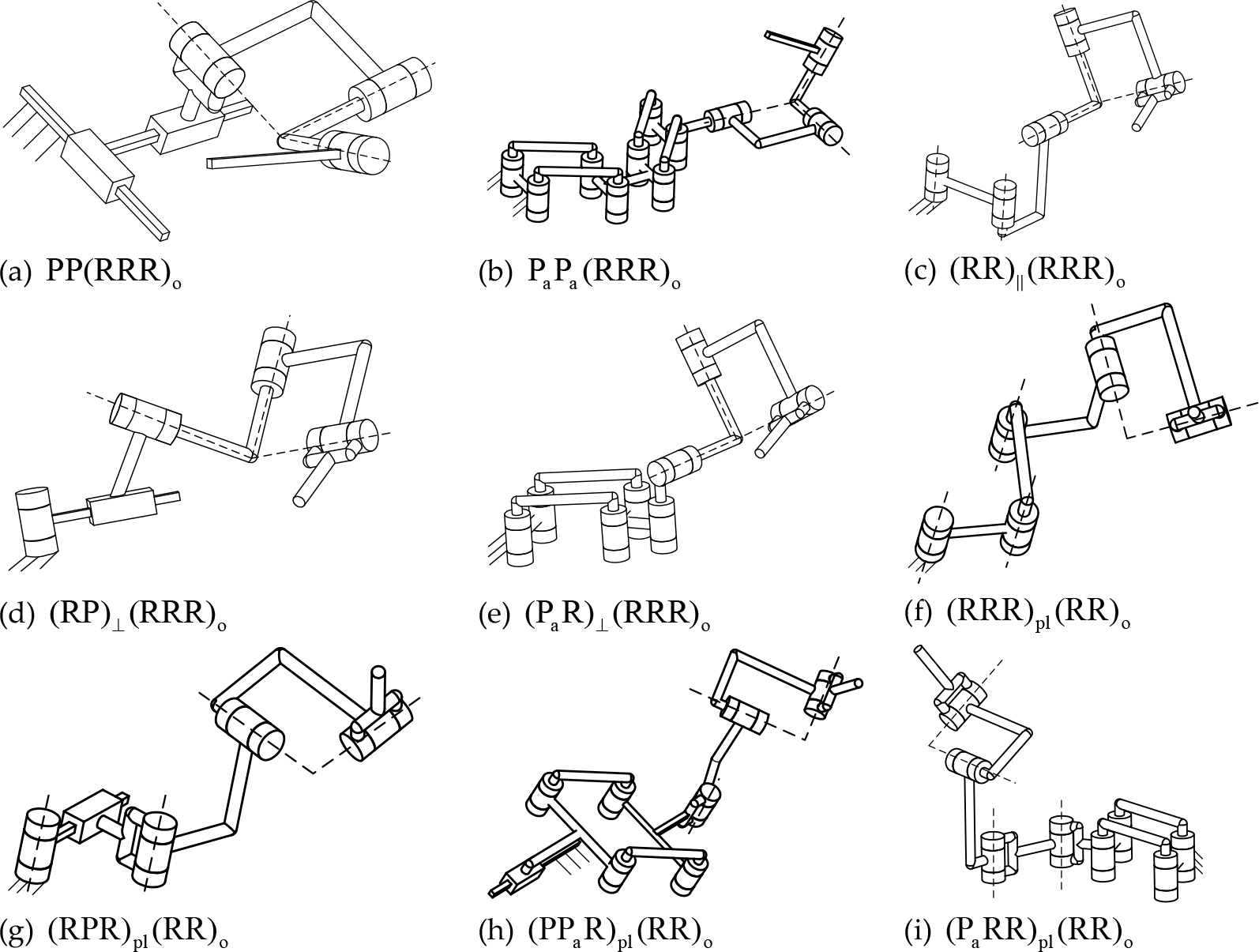
Kinematic limbs with the characteristics of

Kinematic limbs with the characteristics of
Kinematic limbs with the characteristics of

7. Type synthesis examples
A parallel mechanism normally consists of a moving platform which is connected to a fixed base by at least two kinematic limbs. By using the results listed in Table 5, Table 6 and Table 7, we can synthesize FG2RPM with the desired characteristics of directivity, provided that the corresponding requirements are fulfilled. That is, we could synthesize FG2RPM by combing kinematic limbs with the required characteristics under the corresponding conditions listed in Table 5, Table 6 and Table 7.
Figure 5 illustrates two parallel mechanisms with the characteristics of

Parallel mechanisms with the characteristics of
In Figure 6, two symmetrical parallel mechanisms with the characteristics of
According to the first case and the second case listed in Table 7 and the related kinematic limbs, we can synthesize two parallel mechanisms, shown in Figure 7, with the characteristics of

Parallel mechanisms with the characteristics of

Parallel mechanisms with the characteristics of
8. Conclusion
This paper presents the type synthesis of parallel mechanisms - particularly the FG2RPM - according to the GF sets theory. The main contributions of this work are as follows.
The concept of GF sets can be employed to describe the characteristics of robotic manipulators.
The rule of two-dimensional rotations is utilized to lay the theoretical foundation for the intersection of GF sets.
Typical compositions of characteristics are listed for the FG2RPM.
Two axes movement theorems are proposed for the design of kinematic limbs used for the synthesis of FG2RPM.
Several FG2RPM are synthesized and sketched to show the effectiveness of the proposed methodology.