
Abstract
This paper deals with the design, dynamic modelling and sliding mode control of multiple cooperative welding robot manipulators (MWRMs). The MWRMs can handle complex tasks that are difficult or even impossible for a single manipulator. The kinematics and dynamics of the MWRMs are studied on the basis of the Denavit-Hartenberg and Lagrange method. Following that, considering the MWRM system with nonlinear and unknown disturbances, a non-singular terminal sliding mode control strategy is designed. By means of the Lyapunov function, the stability of the controller is proved. Simulation results indicate that the good control performance of the MWRMs is achieved by the non-singular terminal sliding mode controller, which also illustrates the correctness of the dynamic modelling and effectiveness of the proposed control strategy.
Keywords
1. Introduction
Over the last few decades, welding robot manipulators (WRMs) have been extensively studied [1–4]. Robot manipulators in welding processes not only improve production efficiency and working conditions, but also realize welding automation of small-scale production processes [5]. As complexity of the modern man-made engineering systems has increased, concerns for safety and reliability have grown[6]. Thus the WRMs play an important role in many engineering fields, such as shipbuilding processes, car assembly processes, machine tool manufactures, as well as aerial vehicles.
In recent years, with the development of manufacturing technology and the demands of modern engineering, WRMs are used in industrial applications where high accuracy, repeatability and stability of operations are required. Multiple robot manipulators have been studied as having many possible applications [7,8]. This is due to the extended capabilities that the multiple robot manipulators have to offer compared to the use of a single manipulator for the same task [9]. In the literature there is a variety of studies investigating multiple robot manipulators. Sun and Mills [10] have presented an approach to non-model-based decentralized controls of multiple robot systems utilizing structural flexibility in gripper design to avoid large unwanted internal forces acting on multiple robot systems. Kambhampati and Rajasekharan [11] have investigated a Lyapunov-based fuzzy logic controller for a multiple robot system from a human motor-control perspective. Kumar and Garg [12] have considered a problem of sensor-based estimation and control of forces and moments in multiple cooperative robots. Fong et al. [13] have investigated multiple robot remote driving with collaborative control. Kim and Minor[14] have presented a kinematic motion control strategy for an n-axle compliant framed modular wheeled mobile robot, and simulation and experimental results validate and characterize the performance of the algorithms. Liu et al. [15] have investigated a motion-planning approach for coordinating multiple mobile robots in moving along specified paths. Linda and Manic[16] have presented fuzzy force-feedback augmentation for the manual control of a multiple robot system. Senthilkumar and Bharadwaj [17] have investigated multiple robot exploration and terrain coverage in an unknown environment. The method can handle partially occupied cells and narrow door openings in the terrain and performs a complete coverage of the surface regardless of the shape of the environment by constructing multiple spanning trees simultaneously.
Recently, WRMs are finding increased use in a wide variety of modern engineering applications. In addition, multiple robot manipulators can handle complex tasks that are difficult or even impossible for a single manipulator. In this investigation, multiple cooperative welding robot manipulators (MWRMs), which combine WRMs with the multiple robot manipulators, are presented. It is well known that dynamic performance has a great impact on the operation of the manipulator and this is on the basis of its dynamic control [18,19]. MWRMs are a nonlinear multivariable dynamic system and suffer from structured and unstructured uncertainties, such as payload variation and external disturbances. Thus, it is of interest to investigate the control of MWRMs. Sliding mode control has been studied extensively for over 50 years and is widely used in practical applications due to its simplicity and robustness against parameter variations and disturbances [20–23]. In this study, in view of the nonlinear, payload variation and external disturbances of the MWRM system, a non-singular terminal sliding mode control strategy is designed for the high-precision tracking of the MWRM control system.
The remainder of this paper is organized as follows: Section 2 describes the design model of the MWRMs. Then, kinematics of the MWRMs is performed based on the Denavit-Hartenberg method in Section 3. The dynamic model of the MWRMs is provided by applying the Lagrange method in Section 4. A non-singular terminal sliding mode controller is designed for the MWRMs in Section 5. In Section 6, illustrative simulation studies highlight its performances. Finally, some concluding remarks are summarized in Section 7.
2. System description
In this research, for the purpose of numerical analysis, the three-dimensional design model of the MWRMs is taken as an example (see Fig. 1). The MWRMs are composed of a master grabbing robot, a collaborative grabbing robot and a welding robot. A rigid weldment grasped by two grippers is mounted on the last links of two robots with three revolute joints. For simplicity, we assume that there is no slipping and rolling between the weldment and grippers. The gripper of the master grabbing robot is designed to be rigid and the gripper of the collaborative grabbing robot is flexible through installation of a spring on the rigid work pieces of the grippers [10]. The welding robot is similar to the master grabbing robot in structure. Three cooperative robot manipulators have the advantage of the complementary characteristic of the operation and welding manipulators to generate a programmable range of high-precision operation tasks.
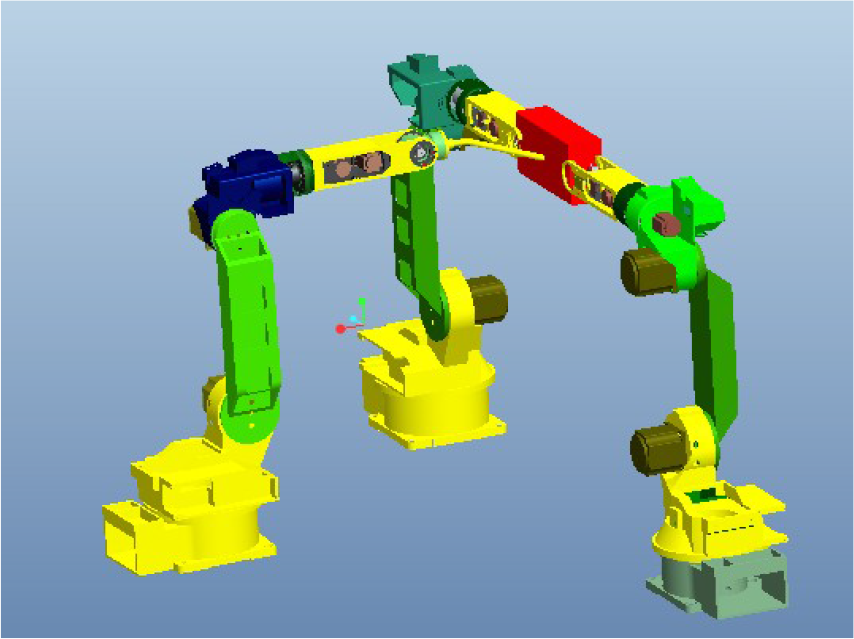
Three dimensional structure of MWRMs
A simple schematic sketch of the MWRMs' structure model with the associated coordinate systems is depicted in Fig. 2. At the bottom of the master grabbing robot, a global coordinate system (OXYZ) is established. The mass centre of the weldment has location coordinates (oxyz).

Schematic sketch of the MWRMs
3. Kinematics of the MWRMs
According to Fig. 2, let us firstly consider the coordinate relations of the MWRMs. Two homogeneous transformations matrixes are used to describe the position of the MWRMs, which are the matrix T and matrix A, respectively. The matrix T can be expressed as[4]
where, p is the mass centre position vector of the weldment, a is named as the approach vector, o is named as the direction vector, n is named as normal vector.
The matrix A can be written as

Where, ai represent the distance between the two public normal and αi is the angle of the two shafts that are perpendicular to the plane; di is the relative position distance of the two joint, and θi is the angle between the two joints normal.
In accordance with the D-H parameters and the coordinate frames, the kinematical coordinate transformation of the robots can be represented by
where,

where, T21 ∈ R4×4 is homogeneous transformation matrix of robot 2 with respect to the robot 1 and T31 ∈ R4×4 is homogeneous transformation matrix of robot 3 with respect to the robot 1.
By combining Eqs. (2)–(4), we have



Matrix T(z) is the homogeneous transformation matrix in local coordinate frame of the weldment and the homogeneous transformation matrix with respect to the joint i of the weldment can be expressed as

Combining (1) and (8), we have

Then, we can get the ith line of Jacobian matrix J(q) ∈ R6×n

According to (10), the entire Jacobian matrix can be obtained there.
From the above, the homogeneous transformation matrixes of the robots have been determined, then the angle of rotation can be solved with Euler's transformation.
we can define

where,

φ, θ, φ are the Euler angle rotating around the x axis, y axis and z axis. Through rotation of the coordinates, we have

Combining (11) and (12), we obtain

Making the corresponding elements of the matrix on both sides equal, 16 equations can be acquired, then we have the following equations

That is to say, known the homogeneous transformation of each joint, we can find out the equivalent Euler angle of the joint of the MWRMs.
4. Dynamic model of the MWRMs
A mathematical dynamic model of the MWRMs is essential for good control design and analysis. For simplicity, we assume that the gravity of the weldment is distributed on the clip of each robot equably. Regardless of the friction and external disturbances, a rigorous model of the MWRMs is derived using the Lagrange method. The simple structure of two grabbing robots is shown in Fig. 3. The Lagrange function is defined as the difference between the potential energy K and kinetic energy P, namely

Schematic of two grabbing robots

Where, K and P are described by a generalized coordinates frame. The dynamics equation can be expressed as

Where, τ i (z) denotes the generalized force applied to the system, θzi are the generalized coordinates of the ith robot.
In Fig. 3, G is any point on the ith joint and its position is given by

where
i

The quality of the point G is recorded as

The total kinetic energy of the joint i is represented by

where, Ii is inertia matrix and it can be expressed as

The potential energy of the system can be derived from

where,
Substituting (21) and (22) into (16) leads to [10]

where,

According to Eqs. (16)∼(23), a dynamic model of the grabbing robots can be formulated as follows

where,

where

q, q̇, q̈ represent the position, velocity and acceleration vector of the joints, respectively; H(q, q̇) ∈ R6×6 denotes the symmetric bounded and positive definite inertia matrix; C(q, q̇) ∈ R6×6 denotes the Coriolis and centrifugal matrix; G(q) ∈ R6×1 is the gravitational vector; τ(t) is the generalized joint torque, J(q) is the Jacobian matrix of the grabbing robot; f(t) denotes the interaction force exerted on the robot by the weldment; d(t) is an uncertain part of the robot's system.
The dynamic equation of the welding robot is similar to that of the grabbing robot. Without going into details, the dynamic model of the welding robot is briefly described by the following equation

The whole dynamic equation of the MWRMs can be described as

5. Non-singular terminal sliding mode controller design
The essence of sliding mode control is that in a vicinity of a prescribed switching manifold, the velocity vector of the controlled state trajectories always points toward the switching manifold [21]. A global non-singular terminal sliding mode controller is presented for the nonlinear dynamical systems with parameter uncertainties and external disturbances [20]. A non-singular terminal sliding mode control strategy is designed for the high-precision tracking of the MWRM system, given by (26).
Suppose the desired position instruction is denoted by qr, we first define ħ (t) = q – qr and
The non-singular terminal sliding surface can be selected as[23]
where, B1 = diag [b11b22 … bnn] is a design matrix, p and q (p>q) is the positive odd number. The control law can be chosen as [22]

where, τ0 = H(q, q̇)q̈ + C(q, q̇)q̇ + G(q) – JT – d(t),
To analyse the stability of the control system, let us define the following candidate Lyapunov function

Differentiating


Differentiating (29) with respect to time, and substituting (30) and (31) into it [20], one has

Therefore, the constructed Lyapunov function V̇ is negative definite for all s ≠ 0.
6. Results and discussion
In this section, a simulation study is carried out to illustrate the performance of the MWRM control system. All the simulations are performed using the MATLAB 2010 software, in which a three-dimensional simulation model of the MWRMs, whose schematic sketch is shown in Fig. 2, has been established. The parameters of the MWRMs are listed in Table 1. The desired joint instructions of the master grabbing robot are set as
Parameters of the MWRMs


The initial state of the system

The uncertain parameters d(t) = 0.1 + 0.2q + 0.3q̇Tq̇. The parameters of the sliding mode controller are chosen as


Fig. 4 shows the desired trajectory and actual trajectory of the joint angles of the MWRMs at different times. Fig. 5 illustrates the input torques of the joints of the MWRMs. One can observe that the tracking errors and input torques are larger within the first 3 seconds. This is mainly because the switching has to scan through a number of candidate controllers before converging to the one that satisfies the Lyapunov inequality. As a result, relatively large transient tracking errors and control efforts can be seen during the transient phase. After 3 seconds, the theoretical and actual position of the manipulator joints is basically the same, which accords with the fast convergence and meets the control stability requirements.
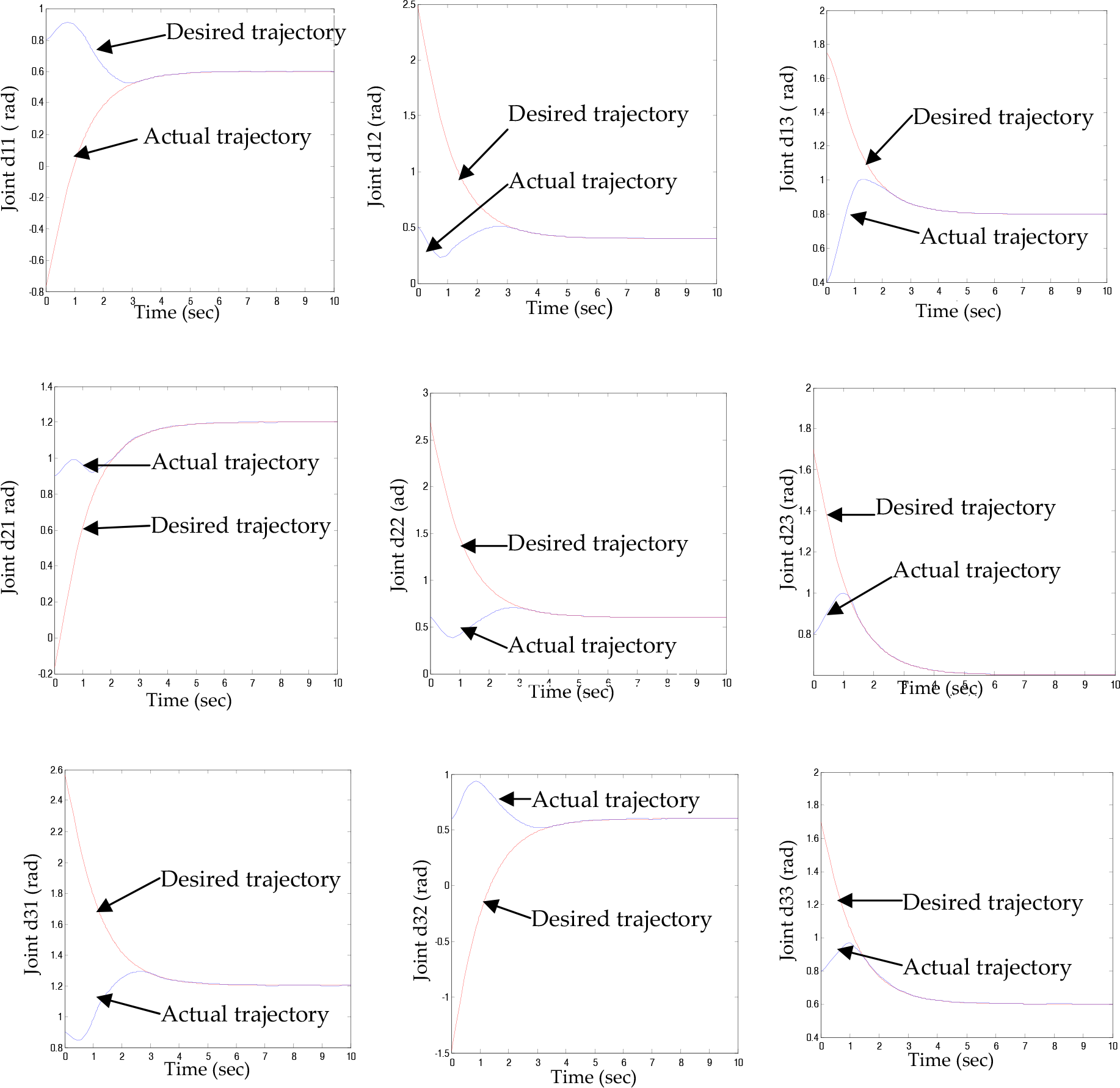
Position trajectory tracking of the MWRMs

Input torque of the MWRMs
Fig. 6 shows the theoretical and actual positions, and the corresponding errors of the weldment in Y and Z directions. It can be seen from Fig. 6 that the errors reach zero after 3 seconds. From the simulations, we can see that the performance of the designed control strategy is effective for the MWRM system.
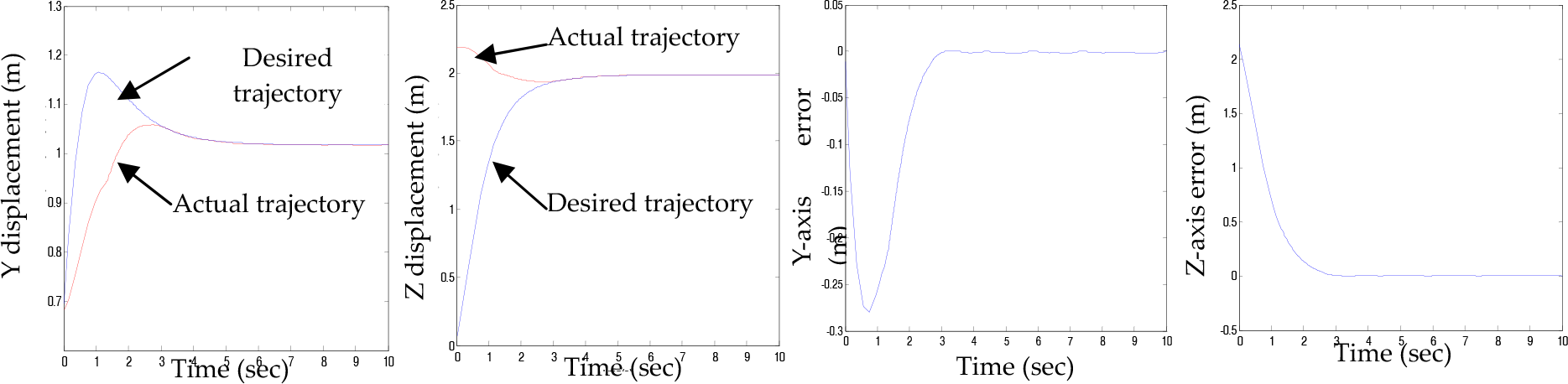
Displacement and error of the w eldment in Y and Z directions
7. Conclusion
This paper has presented the design model of the MWRMs, which combines WRMs with the multiple robot manipulators. The MWRMs can accomplish more complex tasks and improve work efficiency in many engineering fields, and safety is better guaranteed in dangerous working environments. Then, the kinematics of the MWRMs is performed based on the Denavit-Hartenberg method, and a dynamic model is provided by applying the Lagrange method. In view of the nonlinear, payload variation and external disturbances of the MWRMs, a non-singular terminal sliding mode control strategy is designed for the high-precision tracking of the MWRM control system. The non-singular terminal sliding mode control strategy avoids the possibility of the singular problem appearing and the control error can be converged to zero faster than with the conventional sliding mode control in a limited time. From the simulation, the system performance is improved by designing the control parameters properly. The theoretical and actual position of the manipulator joints is basically the same and the input torque values are relatively stable after 3 seconds, which highlights that the dynamic equation is correct and the proposed control method is effective. However, the position errors of the weldment in the first 3 seconds are slightly larger and still need to be reduced further. More work will be devoted to the comparative performance analysis and experimental validation of the control system design of the MWRMs.
Footnotes
8. Acknowledgments
This work was supported by the National Natural Science Foundation of China (50905179), the Visiting Scholar Foundation of Key Lab in University (GZKF-201112), the Six Talent Peak Foundation of Jiangsu Province and the Priority Academic Programme Development of Jiangsu Higher Education Institutions.